We, the Munich Institute of Robotics and Machine Intelligence (MIRMI) of the Technical University of Munich (TUM), in collaboration with Messe München
and automatica have launched successfully a new high-tech platform calledmunich_iin 2021, an event bringing together the world’s leading thought leaders and personalities from AI and robotics.
munich_i will take place again at the next automatica from June 21-24, 2022 in Munich, therefore
Robothon®, the international competition to develop skills in robot manipulations, will also go into the second round!!
Robothon® – The Grand Challenge Series focuses on pressing and unsolved challenges of our time and was 2021 held digitally in the run-up to the automatica sprint
with 9 international teams and a renowned Grand Challenge Jury. As a highlight, it ended with the Award Ceremony on June 22, 2021
with 4 winning teams, a total prize money of € 22,500, great recognition and an expansion of our community.
Are you a motivated robotics enthusiast looking for new challenges?
All-in-one embedded vision platform with new tools and functions
(PresseBox) (Obersulm) At IDS, image processing with artificial intelligence does not just mean that AI runs directly on cameras and users also have enormous design options through vision apps. Rather, with the IDS NXT ocean embedded vision platform, customers receive all the necessary, coordinated tools and workflows to realise their own AI vision applications without prior knowledge and to run them directly on the IDS NXT industrial cameras. Now follows the next free software update for the AI package. In addition to the topic of user-friendliness, the focus is also on making artificial intelligence clear and comprehensible for the user.
An all-in-one system such as IDS NXT ocean, which has integrated computing power and artificial intelligence thanks to the „deep ocean core“ developed by IDS, is ideally suited for entry into AI Vision. It requires no prior knowledge of deep learning or camera programming. The current software update makes setting up, deploying and controlling the intelligent cameras in the IDS NXT cockpit even easier. For this purpose, among other things, an ROI editor is integrated with which users can freely draw the image areas to be evaluated and configure, save and reuse them as custom grids with many parameters. In addition, the new tools Attention Maps and Confusion Matrix illustrate how the AI works in the cameras and what decisions it makes. This helps to clarify the process and enables the user to evaluate the quality of a trained neural network and to improve it through targeted retraining. Data security also plays an important role in the industrial use of artificial intelligence. As of the current update, communication between IDS NXT cameras and system components can therefore be encrypted via HTTPS.
Just get started with the IDS NXT ocean Creative Kit
Anyone who wants to test the industrial-grade embedded vision platform IDS NXT ocean and evaluate its potential for their own applications should take a look at the IDS NXT ocean Creative Kit. It provides customers with all the components they need to create, train and run a neural network. In addition to an IDS NXT industrial camera with 1.6 MP Sony sensor, lens, cable and tripod adapter, the package includes six months‘ access to the AI training software IDS NXT lighthouse. Currently, IDS is offering the set in a special promotion at particularly favourable conditions. Promotion page: https://en.ids-imaging.com/ids-nxt-ocean-creative-kit.html.
All-in-One Embedded Vision Plattform mit neuen Werkzeugen und Funktionen
(PresseBox) (Obersulm) Bei IDS bedeutet Bildverarbeitung mit künstlicher Intelligenz nicht nur, dass die KI direkt auf Kameras läuft und Anwender zusätzlich enorme Gestaltungsmöglichkeiten durch Vision Apps haben. Kunden erhalten mit der Embedded-Vision-Plattform IDS NXT ocean vielmehr alle erforderlichen, aufeinander abgestimmten Tools und Workflows, um eigene KI-Vision-Anwendungen ohne Vorwissen zu realisieren und direkt auf den IDS NXT Industriekameras auszuführen. Jetzt folgt das nächste kostenlose Softwareupdate für das KI-Paket. Im Fokus steht neben dem Thema Benutzerfreundlichkeit auch der Anspruch, die künstliche Intelligenz für den Anwender anschaulich und nachvollziehbar zu machen.
Ein All-in-One System wie IDS NXT ocean, das durch den von IDS entwickelten „deep ocean core“ über integrierte Rechenleistung und künstliche Intelligenz verfügt, eignet sich bestens für den Einstieg in AI Vision. Es erfordert weder Vorkenntnisse in Deep Learning noch in der Kameraprogrammierung. Das aktuelle Softwareupdate macht die Einrichtung, Inbetriebnahme und Steuerung der intelligenten Kameras im IDS NXT cockpit noch einfacher. Hierzu wird unter anderem ein ROI-Editor integriert, mit dem Anwender die auszuwertenden Bildbereiche frei zeichnen und als beliebige Raster mit vielen Parametern konfigurieren, speichern und wiederverwenden können. Darüber hinaus veranschaulichen die neuen Werkzeuge Attention Maps und Confusion Matrix, wie die KI in den Kameras arbeitet und welche Entscheidungen sie trifft. Das macht sie transparenter und hilft dem Anwender, die Qualität eines trainierten neuronalen Netzes zu bewerten und durch gezieltes Nachtraining zu verbessern. Beim industriellen Einsatz von künstlicher Intelligenz spielt auch Datensicherheit eine wichtige Rolle. Ab dem aktuellen Update lässt sich die Kommunikation zwischen IDS NXT Kameras und Anlagenkomponenten deshalb per HTTPS verschlüsseln.
Einfach loslegen mit dem IDS NXT ocean Creative Kit
Wer die industrietaugliche Embedded-Vision-Plattform IDS NXT ocean testen und das Potenzial für die eigenen Anwendungen evaluieren möchte, sollte einen Blick auf das IDS NXT ocean Creative Kit werfen. Kunden erhalten damit alle Komponenten, die sie für die Erstellung, das Trainieren und das Ausführen eines neuronalen Netzes benötigen. Neben einer IDS NXT Industriekamera mit 1,6 MP Sony Sensor, Objektiv, Kabel und Stativadapter enthält das Paket u.a. einen sechsmonatigen Zugang zur KI-Trainingssoftware IDS NXT lighthouse. Aktuell bietet IDS das Set in einer Sonderaktion zu besonders günstigen Konditionen an. Aktionsseite: https://de.ids-imaging.com/ids-nxt-ocean-creative-kit.html.
Autonomously driving robotic assistance system for the automated placement of coil creels
Due to the industry standard 4.0, digitalisation, automation and networking of systems and facilities are becoming the predominant topics in production and thus also in logistics. Industry 4.0 pursues the increasing optimisation of processes and workflows in favour of productivity and flexibility and thus the saving of time and costs. Robotic systems have become the driving force for automating processes. Through the Internet of Things (IoT), robots are becoming increasingly sensitive, autonomous, mobile and easier to operate. More and more they are becoming an everyday helper in factories and warehouses. Intelligent imaging techniques are playing an increasingly important role in this.
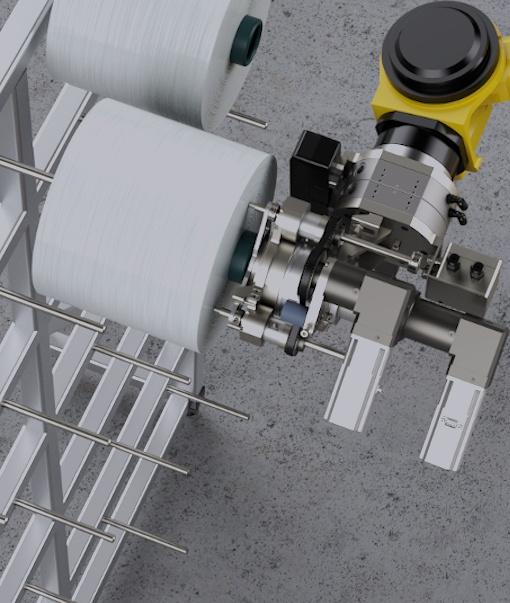
To meet the growing demands in scaling and changing production environments towards fully automated and intelligently networked production, the company ONTEC Automation GmbH from Naila in Bavaria has developed an autonomously driving robotic assistance system. The „Smart Robot Assistant“ uses the synergies of mobility and automation: it consists of a powerful and efficient intralogistics platform, a flexible robot arm and a robust 3D stereo camera system from the Ensenso N series by IDS Imaging Development Systems GmbH.
The solution is versatile and takes over monotonous, weighty set-up and placement tasks, for example. The autonomous transport system is suitable for floor-level lifting of Euro pallets up to container or industrial format as well as mesh pallets in various sizes with a maximum load of up to 1,200 kilograms. For a customer in the textile industry, the AGV (Automated Guided Vehicle) is used for the automated loading of coil creels. For this purpose, it picks up pallets with yarn spools, transports them to the designated creel and loads it for further processing. Using a specially developed gripper system, up to 1000 yarn packages per 8-hour shift are picked up and pushed onto a mandrel of the creel. The sizing scheme and the position of the coils are captured by an Ensenso 3D camera (N45 series) installed on the gripper arm.
Application
Pallets loaded with industrial yarn spools are picked up from the floor of a predefined storage place and transported to the creel location. There, the gripper positions itself vertically above the pallet. An image trigger is sent to the Ensenso 3D camera from the N45 series, triggered by the in-house software ONTEC SPSComm. It networks with the vehicle’s PLC and can thus read out and pass on data. In the application, SPSComm controls the communication between the software parts of the vehicle, gripper and camera. This way, the camera knows when the vehicle and the grabber are in position to take a picture. This takes an image and passes on a point cloud to a software solution from ONTEC based on the standard HALCON software, which reports the coordinates of the coils on the pallet to the robot. The robot can then accurately pick up the coils and process them further. As soon as the gripper has cleared a layer of the yarn spools, the Ensenso camera takes a picture of the packaging material lying between the yarn spools and provides point clouds of this as well. These point clouds are processed similarly to provide the robot with the information with which a needle gripper removes the intermediate layers. „This approach means that the number of layers and finishing patterns of the pallets do not have to be defined in advance and even incomplete pallets can be processed without any problems,“ explains Tim Böckel, software developer at ONTEC. „The gripper does not have to be converted for the use of the needle gripper. For this application, it has a normal gripping component for the coils and a needle gripping component for the intermediate layers.“
For this task, the mobile use for 3D acquisition of moving and static objects on the robot arm, the Ensenso 3D camera is suitable due to its compact design. The Ensenso N 45’s 3D stereo electronics are completely decoupled from the housing, allowing the use of a lightweight plastic composite as the housing material. The low weight facilitates the use on robot arms such as the Smart Robotic Asstistant. The camera can also cope with demanding environmental conditions. „Challenges with this application can be found primarily in the different lighting conditions that are evident in different rooms of the hall and at different times of the day,“ Tim Böckel describes the situation. Even in difficult lighting conditions, the integrated projector projects a high-contrast texture onto the object to be imaged by means of a pattern mask with a random dot pattern, thus supplementing the structures on featureless homogenous surfaces. This means that the integrated camera meets the requirements exactly. „By pre-configuring within NxView, the task was solved well.“ This sample programme with source code demonstrates the main functions of the NxLib library, which can be used to open one or more stereo and colour cameras whose image and depth data are visualised. Parameters such as exposure time, binning, AOI and depth measuring range can – as in this case – be adjusted live for the matching method used.
The matching process empowers the Ensenso 3D camera to recognise a very high number of pixels, including their position change, by means of the auxiliary structures projected onto the surface and to create complete, homogeneous depth information of the scene from this. This in turn ensures the necessary precision with which the Smart Robot Assistant proceeds. Other selection criteria for the camera were, among others, the standard vision interface Gigabit Ethernet and the global shutter 1.3 MP sensor. „The camera only takes one image pair of the entire pallet in favour of a faster throughput time, but it has to provide the coordinates from a relatively large distance with an accuracy in the millimetre range to enable the robot arm to grip precisely,“ explains Matthias Hofmann, IT specialist for application development at ONTEC. „We therefore need the high resolution of the camera to be able to safely record the edges of the coils with the 3D camera.“ The localisation of the edges is important in order to be able to pass on as accurate as possible the position from the centre of the spool to the gripper.
Furthermore, the camera is specially designed for use in harsh environmental conditions. It has a screwable GPIO connector for trigger and flash and is IP65/67 protected against dirt, dust, splash water or cleaning agents.
Software
The Ensenso SDK enables hand-eye calibration of the camera to the robot arm, allowing easy translation or displacement of coordinates using the robot pose. In addition, by using the internal camera settings, a „FileCam“ of the current situation is recorded at each pass, i.e. at each image trigger. This makes it possible to easily adjust any edge cases later on, in this application for example unexpected lighting conditions, obstacles in the image or also an unexpected positioning of the coils in the image. The Ensenso SDK also allows the internal camera LOG files to be stored and archived for possible evaluation.
ONTEC also uses these „FileCams“ to automatically check test cases and thus ensure the correct functioning of all arrangements when making adjustments to the vision software. In addition, various vehicles can be coordinated and logistical bottlenecks minimised on the basis of the control system specially developed by ONTEC. Different assistants can be navigated and act simultaneously in a very confined space. By using the industrial interface tool ONTEC SPSComm, even standard industrial robots can be safely integrated into the overall application and data can be exchanged between the different systems.
Outlook
Further development of the system is planned, among other things, in terms of navigation of the autonomous vehicle. „With regard to vehicle navigation for our AGV, the use of IDS cameras is very interesting. We are currently evaluating the use of the new Ensenso S series to enable the vehicle to react even more flexibly to obstacles, for example, classify them and possibly even drive around them,“ says Tim Böckel, software developer at ONTEC, outlining the next development step.
ONTEC’s own interface configuration already enables the system to be integrated into a wide variety of Industry 4.0 applications, while the modular structure of the autonomously moving robot solution leaves room for adaptation to a wide variety of tasks. In this way, it not only serves to increase efficiency and flexibility in production and logistics, but in many places also literally contributes to relieving the workload of employees.
drylin XXL-Raumportalroboter ist bis zu 60 Prozent günstiger als vergleichbare Lösungen und besonders einfach in Betrieb zu nehmen
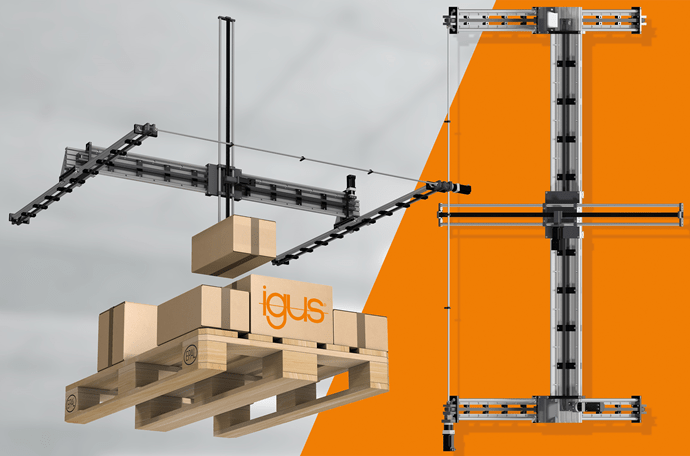
Köln, 8. Februar 2022 – igus erweitert sein breites Low-Cost-Automation Angebot um einen neuen drylin XXL-Raumportalroboter. Das Portal hat einen Aktionsradius von 2000 x 2000 x 1500 Millimeter und eignet sich besonders für Palettierungsanwendungen bis 10 Kilogramm. Der Roboter ist ab 7.000 Euro inklusive Steuerung erhältlich und lässt sich einfach selbst nach dem Do-it-yourself Prinzip aufbauen und programmieren – ohne Hilfe eines Systemintegrators.
Der schmier- und wartungsfreie drylin XXL-Raumportalroboter von igus hebt bis zu 10 Kilogramm und kostet bis zu 60 Prozent weniger als vergleichbare Lösungen. (Quelle: igus GmbH)
Zu teuer in der Anschaffung, zu aufwendig in der Programmierung, zu kompliziert in der Wartung: Viele kleine und mittelständische Unternehmen scheuen den Einstieg in die Automatisierung. Und gefährden damit langfristig ihre Wettbewerbsfähigkeit. Dabei geht der Einstieg ganz leicht von der Hand. Das beweist der drylin XXL-Portalroboter von igus. Der DIY-Bausatz bietet Unternehmen die Möglichkeit, schnell und unkompliziert einen Pick-and-Place Linearroboter für Aufgaben rund um Palettierung, Sortierung, Etikettierung und Qualitätsprüfung in Betrieb zu nehmen. „Palettier-Roboter, die in Zusammenarbeit mit externen Dienstleistern entstehen, kosten schnell zwischen 85.000 und 120.000 Euro. Das sprengt das Budget vieler kleiner Betriebe“, sagt Alexander Mühlens, Leiter Geschäftsbereich Low-Cost-Automation bei igus. „Wir haben deshalb eine Lösung entwickelt, die aufgrund des Einsatzes von Hochleistungskunststoffen und Leichtbaumaterialien wie Aluminium um ein Vielfaches günstiger ist. So kostet der drylin XXL-Raumportalroboter je nach Ausbaustufe zwischen 7.000 und 10.000 Euro. Eine Investition, die risikoarm ist und sich in der Regel innerhalb weniger Wochen amortisiert.“
DIY-Bausatz lässt sich ohne Vorkenntnisse schnell zusammensetzen
Das Raumportal erhält der Käufer als DIY-Bausatz. Bestandteile sind zwei Zahnriemenachsen und eine Zahnstangen-Auslegerachse mit Schrittmotoren und einem Aktionsraum von 2000 x 2000 x 1500 Millimeter. In der Maximallänge sind auch bis zu 6.000 x 6.000 x 1.500 Millimeter möglich. Zusätzlich ist im Paket ein Schaltschrank, Leitungen und Energieketten sowie die kostenlose Steuerungssoftware igus Robot Control (iRC) enthalten. Anwender können die Komponenten in wenigen Stunden zu einem betriebsfertigen Linearroboter zusammensetzen – ohne externe Hilfe, ohne Vorkenntnisse und ohne lange Einarbeitungszeit. Und werden noch zusätzliche Komponenten wie Kamerasysteme oder Greifer benötigt, so werden Anwender auf dem Robotik-Marktplatz RBTX schnell fündig.
Automatisierung entlastet Mitarbeiter
Zum Einsatz kommt der kartesische Roboter beispielsweise an Förderbändern, die Produkte von Spritzgussmaschinen abtransportieren. Hier nimmt der Roboter Artikel mit einem Maximalgewicht von 10 Kilogramm vom Band, transportiert sie mit einer Geschwindigkeit von bis zu 500 mm/s und positioniert sie mit einer Wiederholgenauigkeit von 0,8 Millimeter auf einer Palette. „Dank dieser Automatisierung können Betriebe ihre Mitarbeiter von körperlich anstrengenden und zeitaufwendigen Palettier-Aufgaben entlasten und Ressourcen für wichtigere Aufgaben gewinnen.“ Das System selbst verursacht dabei keinen Wartungsaufwand. Die Linearachsen bestehen aus korrosionsfreiem Aluminium, die Schlitten bewegen sich über Gleitlager aus Hochleistungskunststoff, die dank integrierter Festschmierstoffe über viele Jahre einen reibungsarmen Trockenlauf ohne externe Schmiermittel ermöglichen – selbst in staubigen und schmutzigen Umgebungen.
Doch nicht nur die Montage, sondern auch die Programmierung von Bewegungsabläufen stellt kein Einstiegshindernis dar. „Für viele Betriebe, die keine eigenen IT-Fachkräfte haben, ist die Programmierung von Robotern oft mit Problemen besetzt“, so Mühlens. „Wir haben deswegen mit der iRC eine kostenlose Software entwickelt, die optisch an häufig genutzte Office Software erinnert und eine intuitive Programmierung von Bewegungen ermöglicht. Das Besondere: die Software ist kostenlos und die so entstehende Low-Code-Programmierung kann dann 1:1 am realen Roboter verwendet werden.“ Herzstück der Software ist ein digitaler Zwilling des Raumportals, über den sich Bewegungen mit wenigen Klicks festlegen lassen. Auch im Vorfeld, bevor der Roboter in Betrieb ist. „Interessenten können vor dem Kauf anhand des 3D-Modells prüfen, ob gewünschte Bewegungen tatsächlich realisierbar sind. Zusätzlich laden wir alle Interessen ein, unsere Roboter live oder über das Internet kostenfrei auszuprobieren. Wir unterstützen sie bei der Inbetriebnahme und zeigen, was alles mit Low-Cost-Robotern möglich ist. Die Investition wird dadurch nahezu risikofrei.“
Sophie writes on behalf of Panda Security covering cybersecurity and online safety best practices for consumers and families. Specifically, she is interested in removing the barriers of complicated cybersecurity topics and teaching data security in a way that is accessible to all. Her most recent piece is on the evolution of robotic dogs and where they're headed next.
Robots have been a point of fascination and study for centuries as researchers and inventors have sought to explore the potential for automated technology. While there’s a long history of the development and creation of autonomous machines, mobile, quadrupedal robots — or four-legged robotic dogs — have seen a significant boom in the last few decades.
The development of quadrupedal robots stems from the necessity of mobile robots in exploring dangerous or unstructured terrains. Compared to other mobile robots (like wheeled or bipedal/two-legged robots), quadrupedal robots are a superior locomotion system in terms of stability, control and speed.
The capabilities of quadrupedal robots are being explored in a variety of fields, from construction and entertainment to space exploration and military operations. Today, modern robotic dogs can be purchased by businesses and developers to complete tasks and explore environments deemed too dangerous for humans. Read on for the evolution of robotic dogs and where they might be headed in the future.
1966: Phony Pony
Although it technically mirrored the form of a horse, the Phony Pony was the first autonomous quadrupedal robot to emerge in the U.S. that set the precedent for robotic dogs of the future. Equipped with electrical motors, the Pony Pony had two degrees of freedom, or joints, in each leg (the hip and the knee) and one adaptive joint in the frontal plane. The hip and knee joints were identical, allowing for both forward and backward walking movements.
The Phony Pony was capable of crawling, walking and trotting, albeit at a very slow speed. Thanks to its spring-restrained “pelvic” structure, it was able to maintain static vertical stability during movement. Since the Phony Pony was developed before the advent of microprocessors, it could only be controlled through cables connected to a remote computer in an adjacent building.
Developer: Frank and McGhee
Use: Initial research and development of autonomous quadrupeds
1999: AIBO
In the late 1990s, Sony’s AIBO — one of the most iconic and advanced entertainment robotic dogs — hit the market. While the AIBO (Artificial Intelligence RoBOt) was constructed for entertainment purposes, its machinery is still highly complex.
Developed with touch, hearing, sight and balancing capabilities, it can respond to voice commands, shake hands, walk and chase a ball. It can also express six “emotions”: happiness, sadness, fear, anger, dislike and surprise. Its emotional state is expressed through tail wagging, eye color changes and body movements, as well as through a series of sounds including barks, whines and growls. Today, the AIBO has been used across many research groups for the purpose of testing artificial intelligence and sensory integration techniques.
Developer: Sony
Use: Toys and entertainment
2005: BigDog
Boston Dynamics has become a leader in the world of robotics, specifically in their development of canine-inspired quadrupeds. Their first robotic dog, coined BigDog, arrived in 2005. Measuring three by two feet and weighing in at 240 pounds, BigDog was designed to support soldiers in the military. It can carry 340 pounds, climb up and down 35-degree inclines and successfully hike over rough terrains.
Each of BigDog’s legs has a passive linear pneumatic compliance — a system that controls contact forces between a robot and a rigid environment — and three active joints in the knees and hips. The robot is powered by a one-cylinder go-kart engine, and its dynamic regulating system allows it to maintain balance. Its movement sensors embrace joint position, joint force, ground contact, ground load and a stereo vision system.
In 2012, developers were still working to refine BigDog’s capabilities before plans to officially deploy it to military squads. However, the project was discontinued in 2015 after concluding its gas-powered engine was too noisy to be used in combat.
Developer: Boston Dynamics
Use: Assist soldiers in unsafe terrains
2009: LittleDog
Four years after BigDog came LittleDog, Boston Dynamics’ smallest quadrupedal robot to date. LittleDog was developed specifically for research purposes to be used by third parties investigating quadrupedal locomotion.
Each of LittleDog’s legs are powered by three electric motors fueled by lithium polymer batteries and have a maximum operation time of thirty minutes. LittleDog maintains a large range of motion and is capable of climbing, crawling and walking across rocky terrains. A PC-level computer placed on top of LittleDog is responsible for its movement sensors, controls and communications. It can be controlled remotely and includes data-logging support for data analysis purposes.
Developer: Boston Dynamics
Use: Research on locomotion in quadrupeds
2011: AlphaDog Proto
Continuing their efforts to develop military-grade robots, Boston Dynamics released AlphaDog Proto in 2011. Powered by a hydraulic actuation system, AlphaDog Proto is designed to support soldiers in carrying heavy gear across rocky terrains. It’s capable of carrying up to 400 pounds for as far as 20 miles, all within the span of 24 hours, without needing to refuel.
AlphaDog Proto is equipped with a GPS navigation and computer vision system that allows it to follow soldiers while carrying their gear. Thanks to an internal combustion engine, AlphaDog Proto proved to be quieter than its predecessor BigDog, making it more suitable for field missions.
Developer: Boston Dynamics
Use: Assist soldiers in carrying heavy gear over unsafe terrains
2012: Legged Squad Support System (LS3)
Boston Dynamics’ development of the Legged Squad Support System (LS3) came soon after the creation of BigDog in their efforts to continue refining their quadrupedal robots for soldiers and Marines. LS3 was capable of operating in hot, cold, wet and otherwise unfavorable conditions. It contained a stereo vision system with a pair of stereo cameras, which were mounted inside the robot’s head. This operated in conjunction with a light-detecting and ranging unit that allowed it to follow a soldier’s lead and record feedback obtained from the camera.
Compared to BigDog, LS3 was around 10 times quieter at certain times and had an increased walking speed of one to three miles per hour, increased jogging speed of five miles per hour and the ability to run across flat surfaces at seven miles per hour. It was also capable of responding to ten voice commands, which was a more efficient function for soldiers who would be too preoccupied with a mission to use manual controls.
Five years into development, LS3 had successfully been refined enough to be able to operate with Marines in a realistic combat exercise and was used to resupply combat squads in locations that were difficult for squad vehicles to reach. By 2015, however, the LS3 was shelved due to noise and repair limitations. While the Marines were ultimately unable to use the LS3 in service, it provided valuable research insights in the field of autonomous technology.
Developer: Boston Dynamics
Use: Assist soldiers in carrying heavy gear over unsafe terrains
2016: Spot
Spot is Boston Dynamics’ next creation in their line of quadrupedal robots, designed in an effort to move away from developing quadrupeds strictly for military use and instead move into more commercial use. Spot is significantly smaller than their previous models, weighing just 160 pounds. Spot is capable of exploring rocky terrains, avoiding objects in its path during travel and climbing stairs and hills.
Spot’s hardware is equipped with powerful control boards and five sensor units on all sides of its body that allow it to navigate an area autonomously from any angle. Twelve custom motors power Spot’s legs, gaining speed of up to five feet per second and operating for up to 90 minutes. Its sensors are able to capture spherical images and also allow for mobile manipulation for tasks such as opening doors and grasping objects. Spot’s control methods are far more advanced than Boston Dynamics’ earlier robots, allowing for autonomous control in a wider variety of situations.
Developer: Boston Dynamics
Use: Documenting construction process and monitoring remote high-risk environments
2016: ANYmal
While Boston Dynamics had been the main leader in quadrupedal robots since the early 2000s, Swiss robotics company ANYbotics came out with its own iteration of the robotic dog in 2016. Positioned as an end-to-end robotic inspection solution, ANYmal was developed for industrial use, specifically the inspection of unsafe environments like energy and industrial plants.
ANYmal is mounted with a variety of laser inspection sensors to provide visual, thermal and acoustic readings. Equipped with an on-board camera, it’s capable of remote panning and tilting settings to adjust views of the inspection site. ANYmal is capable of autonomously perceiving its environment, planning its navigation path and selecting proper footholds during travel. It can even walk up stairs and fit into difficult-to-reach areas that traditional wheeled robots can’t.
ANYmal has undergone a handful of development iterations since 2016 and is available for purchase as of 2021. ANYbotics is currently working on an upgraded version of the robot suitable for potentially explosive environments.
Developer: ETH Zurich and ANYbotics
Use: Remote inspection of unsafe environments
2021: Vision 60
One of the latest developments in quadrupedal robots is Ghost Robotics’ Vision 60 robotic dog, which has recently been tested at the U.S. Air Force’s Scott Air Force Base in Illinois as part of its one-year pilot testing program. Built to mitigate risks faced by Air Force pilots, Vision 60 features a rifle mounted on its back contained in a gun pod and is equipped with sensors that allow it to operate in a wide variety of unstable terrains. It’s also capable of thermal imaging, infrared configuration and high-definition video streaming.
Vision 60 can carry a maximum of 31 pounds and can travel at up to 5.24 feet per second. It’s considered a semi-autonomous robot due to its accompanying rifle; while it can accurately line up with a target on its own, it can’t open fire without a human operator (in accordance with the U.S. military’s autonomous systems policy prohibiting automatic target engagement).
Developer: Ghost Robotics
Use: Military and Homeland Security operations
2021: CyberDog
With more companies embracing the development of quadrupeds, Xiaomi Global followed suit and released their version named CyberDog. CyberDog is an experimental, open-source robot promoted as both a human-friendly companion and an asset by law enforcement and military. CyberDog is sleeker and smaller than its other robotic dog predecessors, carrying a payload of just 6.6 pounds and running over 10 feet per second.
CyberDog is equipped with multiple cameras and image sensors located across its body, including touch sensors and an ultra-wide fisheye lens. CyberDog can hold 128 gigabytes of storage and is powered by Nvidia’s Jetson Xavier AI platform to perform real-time analyses of its surroundings, create navigation paths, plot its destination and avoid obstacles. CyberDog can also perform backflips and respond to voice commands thanks to its six microphones.
By making CyberDog an open-source project, Xiaomi hopes to expand its reach into the future of robot development and innovation. Its open-source nature is meant to encourage robotics enthusiasts to try their hand at writing code for CyberDog, giving the project more exposure and bolstering Xiaomi’s reputation in the robotics community.
Developer: Xiaomi Global
Use: An open-source platform for developers to build upon
While the market for quadrupedal robots is still in its early stages, interest is steadily growing in a wide range of industries. As for fears of robots pushing out the need for traditionally human-led jobs, these machines are more intended to support humans alongside their jobs rather than replace them outright.
On the other hand, privacy concerns associated with robots aren’t to be ignored. As with any tech-enabled device, hacking is always possible, especially for open-source robotic models that can put users’ personal information at risk. This applies not only to the quadrupeds discussed above, but to more common commercial robotic systems like baby monitors, security systems and other WiFi-connected devices. It’s important to ensure your home network system is as strong and secure as possible with a home antivirus platform.
Der „Crawler“ übernimmt lebensgefährliche Wartungseinsätze in Pipelines – ausgerüstet mit Energieführungen von igus
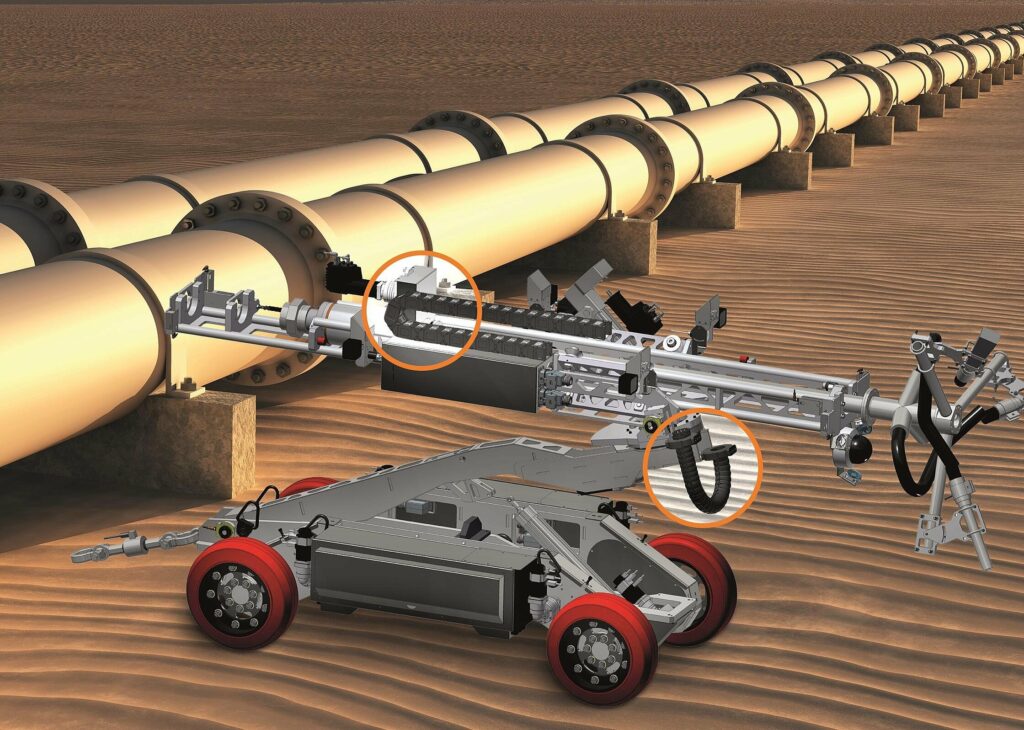
Köln, 11. Januar 2022 – Er erledigt Arbeit, die für Menschen Lebensgefahr bedeutet: Der ferngesteuerte Roboter „Crawler“ saniert Innenwände von Pipelines in Kraftwerken. Eine Automation, die unter anderem deshalb zuverlässig gelingt, weil Energie- und Datenleitungen vor den rauen Umgebungsbedingungen geschützt sind. Hier setzt der US-amerikanische Hersteller Remote Orbital Installations LLC auf die Zusammenarbeit mit igus.
Wie gefährlich die Arbeit in Pipelines sein kann, zeigt ein tragischer Unfall, der sich 2007 in einem Kraftwerk in Colorado ereignete. Als Arbeiter im Inneren einer Druckrohrleitung, die Wasser zu den Turbinen leitet, eine Epoxidharzbeschichtung auftrugen, entzündete sich ein brennbares Lösungsmittel. Fünf Menschen kamen ums Leben. Ein Schicksal, das Remote Orbital Installations (LLC) und Big Sky Engineering anderen Arbeitern ersparen möchten. Die beiden US-amerikanischen Unternehmen haben deshalb den Crawler entwickelt – eine fernsteuerbare Roboterplattform auf vier Rädern, die durch Rohrleitungen fährt, die Innenwände mit einem Strahlwerkzeug reinigt und mit Epoxidharz neu auskleidet. Die Arbeiter befinden sich währenddessen in Sicherheit, am anderen Ende der Steuerleitung. Doch bevor der Crawler bereit für den Einsatz war, mussten die Ingenieure einige Herausforderungen meistern. Unter anderem galt es, Bauteile zu finden, die der schmutzigen und feuchten Umgebung im Inneren der Pipeline standhalten – ansonsten könnten Ausfälle dazu führen, dass Arbeiter das Rohr betreten und sich in Gefahr bringen müssten. Zu diesen Bauteilen zählten Führungen, die Energie- und Datenleitungen des Roboters vor Beschädigungen durch unkontrollierte Bewegungen schützen sollen.
„Die Langlebigkeit der igus Produkte war entscheidend für den Erfolg“
Fündig wurden die US-amerikanischen Konstrukteure jenseits des Atlantiks bei igus. Die Energieketten des plastics motion Spezialisten übernehmen an mehreren Stellen die Führung von Energie- und Datenleitungen. Sie führen beispielsweise die Leitungen des Mechanismus, der die Radbreite des Crawlers auf den Rohrdurchmesser einstellt. Ebenso Leitungen des Auslegers, der für die Höhenverstellung der Werkzeuge verantwortlich ist. Und für die Sicherheit von hängenden Leitungen sorgen geschlossene Energieketten der triflex Serie, die dank tordierbarer Kettenglieder kontrollierte, dreidimensionale Bewegungen ermöglichen. Alle Energieketten im Crawler bestehen aus einem verschleißfesten, robusten, chemikalienbeständigen und korrosionsfreien Hochleistungskunststoff, der auch widrigsten Umgebungen über Jahre zuverlässig standhält. „Die Langlebigkeit der Produkte von igus war entscheidend für den Erfolg des Crawlers“, bestätigt Ingenieur Mike Kronz. „Wir haben mehrere Projekte durchgeführt und hatten keinen einzigen Ausfall.“
Mutige Energiekettenlösungen: Anmeldung zum vector award 2022
Der Roboter Crawler ist ein Beispiel für einen Einsatz von Energieketten, der sich durch wirtschaftliche Effizienz und Mut zur Kreativität auszeichnet. Vergleichbare Anwendungen sucht igus für den vector award 2022, ein Wettbewerb, der einzigartige Energieführungslösungen prämiert. Eine Expertenjury – bestehend aus Vertretern der Wissenschaft, Industrie und Fachmedien – bestimmt die Gewinner zur Hannover Messe 2022. Das Preisgeld beträgt für den goldenen vector award beträgt 5.000 Euro. Einsendeschluss ist der 11. Februar 2022.
A wall climbing robot made by HausBots can reduce workplace accidents, as it can be used for inspection and maintenance tasks such as building and infrastructure inspection and surveying or even painting.
However, to make sure the robot itself would work and is safe to use researchers from the WMG SME group helped the local business design and test the robot The robot is now on the market, after a four-year journey from a garage in Bournville to Singapore
A novel wall climbing robot, built designed and created by Birmingham based HausBots with the help of WMG at the University of Warwick is on the market, and could reduce the number of workplace accidents.
HausBots is a Birmingham based company who are on mission to use technology to protect and maintain the built environment. They have designed, built and created an innovative wall-climbing robot, that can climb vertical surfaces and be used for inspection and maintenance tasks such as building and infrastructure inspection and surveying or even painting.
The idea of the HausBots started in the co-founder’s garage, and with the help of the WMG SME team the robot was bought to life, as the team were able to help with building the prototype and testing the technology.
Four years ago, when the first prototype was developed researchers at WMG, University of Warwick worked with HausBots on the circuit motor controls and designed the system to help them get production ready thanks to the Product Innovation Accelerator scheme with CWLEP.
One the key uses of the HausBots is to help reduce the number of workplace accidents, in the US 85,000 workers fall from height every year, of which 700 of them will be fatal. The accidents also cost insurance companies over $1bn in claims every year, therefore not only does reducing the amount of accidents mean less injuries and trauma, but also means there’s a huge economic saving.
However, to ensure the robot itself doesn’t fall it had to undergo extensive electro-magnetic compatibility (EMC) testing to make sure the fans, which essentially attach it to the surface arefunctioning correctly.
The WMG SME team tested the robot by placing it in the EMC chamber and assessing how it responds to noise and to make sure it didn’t emit any unwanted noise into the atmosphere itself. Using amplifiers to simulate noise and analysers, the researchers were able to detect any unwanted interference and emissions with the robot and record results.
Dr David Norman, from the WMG SME group at the University of Warwick comments: “It has been a pleasure to be with HausBots and help them develop their product, the concept of the robot is incredible, and could save lives and reduce the number of workplace accidents.
“Our facilities and expertise have helped HausBots develop a market-ready product, which is now on the market and has carried out many jobs from painting and cleaning the graffiti off the spaghetti junction in Birmingham. We hope to continue working with them in the future and can’t wait to see where they are this time next year.”
Jack Crone, CEO and Co-Founder of HausBots comments:
“The WMG SME group have helped us from day one, by helping us build the prototype all the way to making sure the robot safely sticks to the wall and carries out its job efficiently.
“We have worked tirelessly over the last 3 years to make HausBot, and we are incredibly excited to have sold our first one to a company in Singapore, we hope this is the first of many that will also help reduce numbers of workplace accidents.
“Going forward we hope to continue our work with WMG at the University of Warwick to make more robots for other uses that can reduce harm to humans.”
drylin Zahnriemenachse ist durch Plug & Play-Kit jetzt mit allen Leichtbau- Roboterherstellern kompatibel
Köln, 25. November 2021 – Gelenkarmroboter über sechs Meter verfahren und ihren Arbeitsraum dadurch vervierfachen: Die 7. Achse, die igus für diesen Job anbietet, ist dank eines einfachen Plug & Play-Kits ab sofort mit allen Leichtbau-Gelenkarm-Robotern weltweit kompatibel. Bislang profitierten von dieser erhöhten Mobilität Modelle von Universal Robots, Epson und der robolink Serie von igus. Jetzt kommen auch Omron, Franka Emika, Doosan, Yuanda Robotics und viele weitere Anbieter von Leichtbaurobotik hinzu.
Erste Anwender der sogenannten 7. Achse, eine Linearachse mit elektrischem Zahnriemenantrieb, die igus im Sommer 2020 auf den Markt gebracht hat, waren laut Alexander Mühlens begeistert: „Plötzlich sind ihre Gelenkarmroboter dank der zusätzlichen Achse ähnlich mobil wie Menschen. Sie sind dadurch in der Lage, in Automationsumgebungen mehrere Aufgaben zu übernehmen sind dadurch deutlich produktiver“, so der Leiter Automatisierungstechnik bei igus. „Wir haben uns deswegen entschlossen, die Kompatibilität des Systems auf alle Hersteller weltweit zu erweitern – etwa Omron, Franka Emika, Doosan und Yuanda Robotics. Die Anpassung ermöglichen wir durch ein passendes Plug & Play-Kit aus Hard- und Software.“
Anschlussfertige Komplettlösung für alle Leichtbau-Gelenkarmroboter
Zukünftig können alle Leichtbau-Gelenkarmroboter im Gewichtsbereich von 10 bis 50 Kilogramm oder, abhängig von der Dynamik, einer Nutzlast von 2 bis 20 Kilogramm die 7. Achse nutzen. igus liefert das System als anschlussfertige Komplettlösung aus einer Hand. Es besteht aus einer bis zu sechs Meter langen Zahnriemenachse der Serie drylin ZLW mit zwei Parallelschienen aus Aluminium, die sich auf dem Boden, an Wänden oder Decken befestigen lassen und einem Zahnriemenantrieb mit Schrittmotor für eine Positioniergenauigkeit von 0,3 Millimetern. Mit dabei ist auch eine Energiekette für die Führung von Energie- und Datenleitungen, ein Schaltschrank-Integrationskit mit Leitungen, Motorcontroller und der jeweiligen Softwarelösung sowie ein Schlitten mit der Adapterplatte, die igus an die Geometrie tausender Gelenkarmroboter anpasst. Alle Komponenten sind perfekt aufeinander abgestimmt, so dass Anwender das System ohne teuren Konstruktions- und Abstimmungsaufwand schnell in Betrieb nehmen und von der neuen Mobilität profitieren können.
Betriebskosten sparen: 7. Achse ist schmier- und wartungsfrei
Anwender sparen nicht nur bei der Planung und Anschaffung der 7. Achse Zeit und Geld, sondern auch im Betrieb. Denn das System arbeitet wartungsfrei. Der Grund: Die Schlitten bewegen sich mithilfe von drylin Lineartechnik auf den Aluminiumschienen. Der Hochleistungskunststoff der Lager ermöglicht dabei einen reibungsarmen und wartungsfreien Trockenlauf – eine Nachschmierung ist nicht erforderlich. Die Schmiermittelfreiheit macht das System zudem hygienisch, da Schmieröl ein wahrer Schmutzmagnet ist. Insbesondere als Edelstahlvariante mit FDA konformen Komponenten ist die Linearführung somit bestens auch für Branchen wie die Lebensmittelindustrie geeignet.