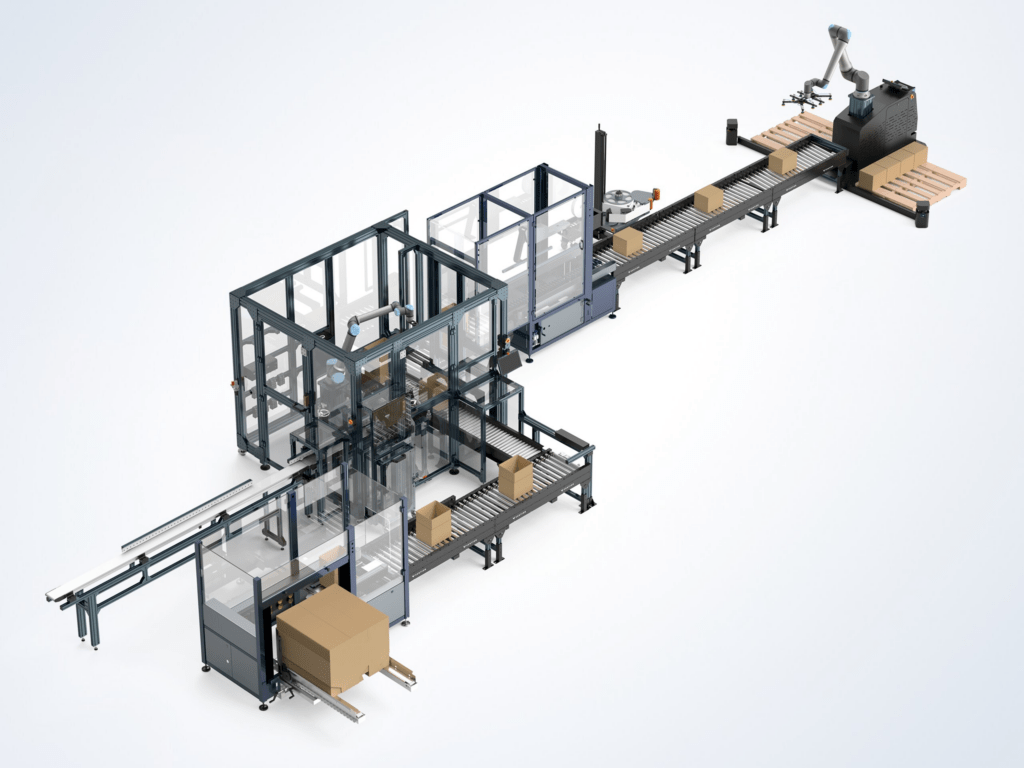
Stell dir vor, du stehst zehn Stunden lang an einem Förderband. Immer wieder kommt ein kleines Paket vorbei. Du musst es greifen, drehen und so auf das Band legen, dass der Barcode richtig liegt. Klingt einfach? Nach ein paar Stunden brennen wahrscheinlich deine Arme.
Genau so einen Wettbewerb hat das Robotik-Unternehmen Figure AI gezeigt: Ein Mensch trat gegen humanoide Roboter der Reihe Figure 03, kurz F.03, an. Das Ergebnis war überraschend knapp – und zeigt, wie nah moderne Roboter bei einfachen Lageraufgaben schon an Menschen herankommen.
Was war die Aufgabe?
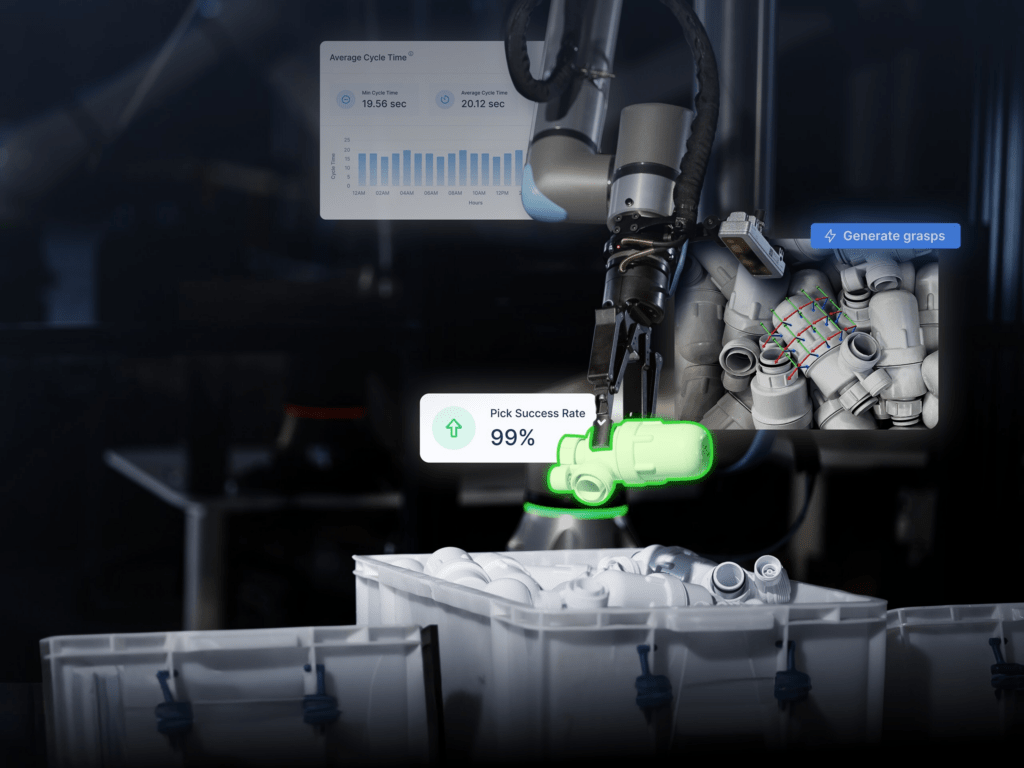
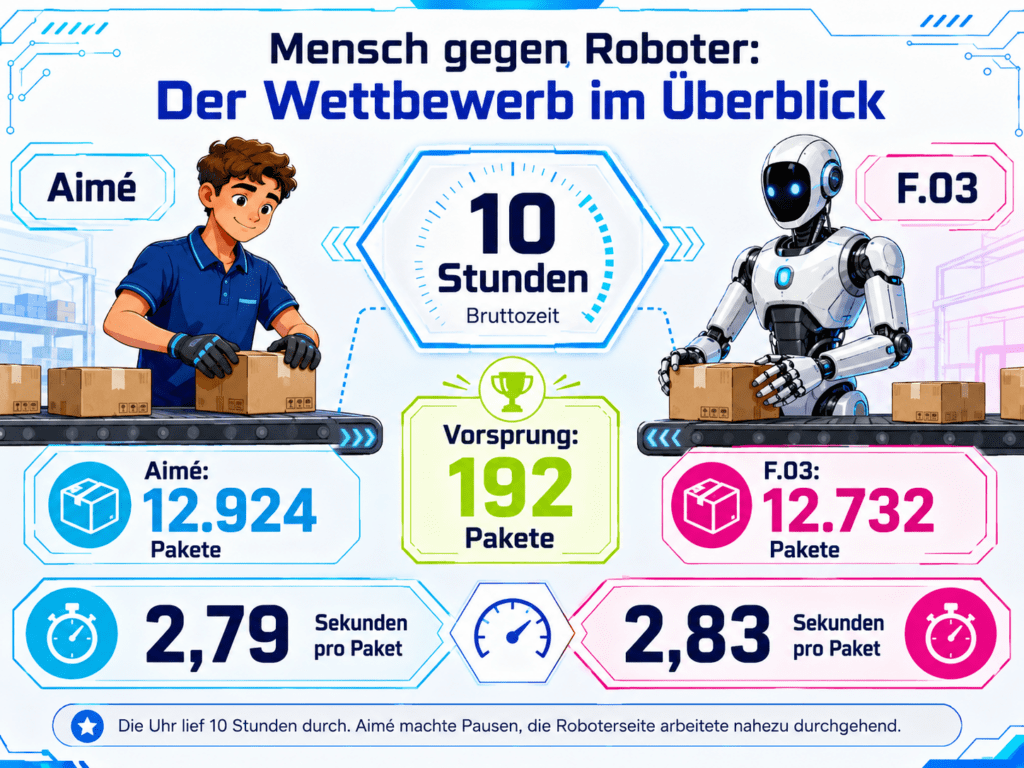
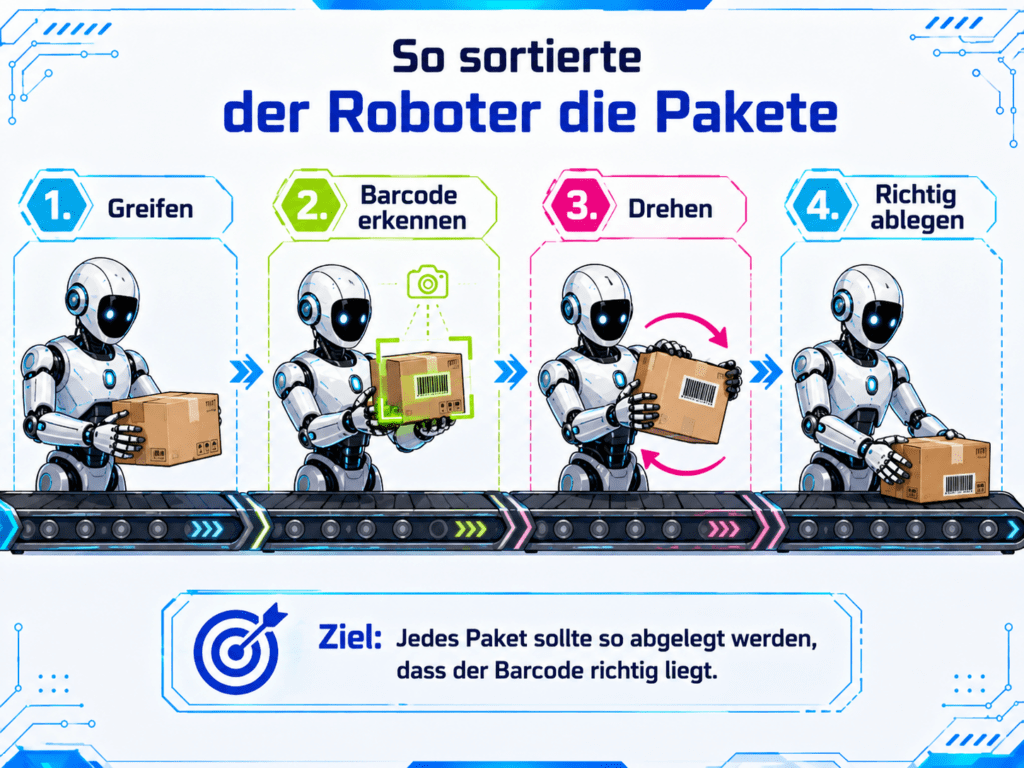
Die Aufgabe war klar und gut messbar: Pakete aufnehmen, den Barcode erkennen und das Paket passend auf ein Förderband legen. Der Wettbewerb lief über 10 Stunden Bruttozeit. Das bedeutet: Die Uhr lief durch, auch wenn der Mensch zwischendurch Pausen machte.
Der menschliche Teilnehmer hieß Aimé Gérard. Er gewann knapp: Aimé sortierte 12.924 Pakete, die Roboterseite 12.732 Pakete. Das sind nur 192 Pakete Unterschied. Umgerechnet brauchte Aimé im Durchschnitt 2,79 Sekunden pro Paket, F.03 2,83 Sekunden pro Paket. Figure-Chef Brett Adcock schrieb danach sinngemäß, dies sei wohl das letzte Mal gewesen, dass ein Mensch so einen Wettbewerb gegen einen Roboter gewinnt.
Wichtig: Es war nicht einfach „ein Mensch gegen einen Roboter“
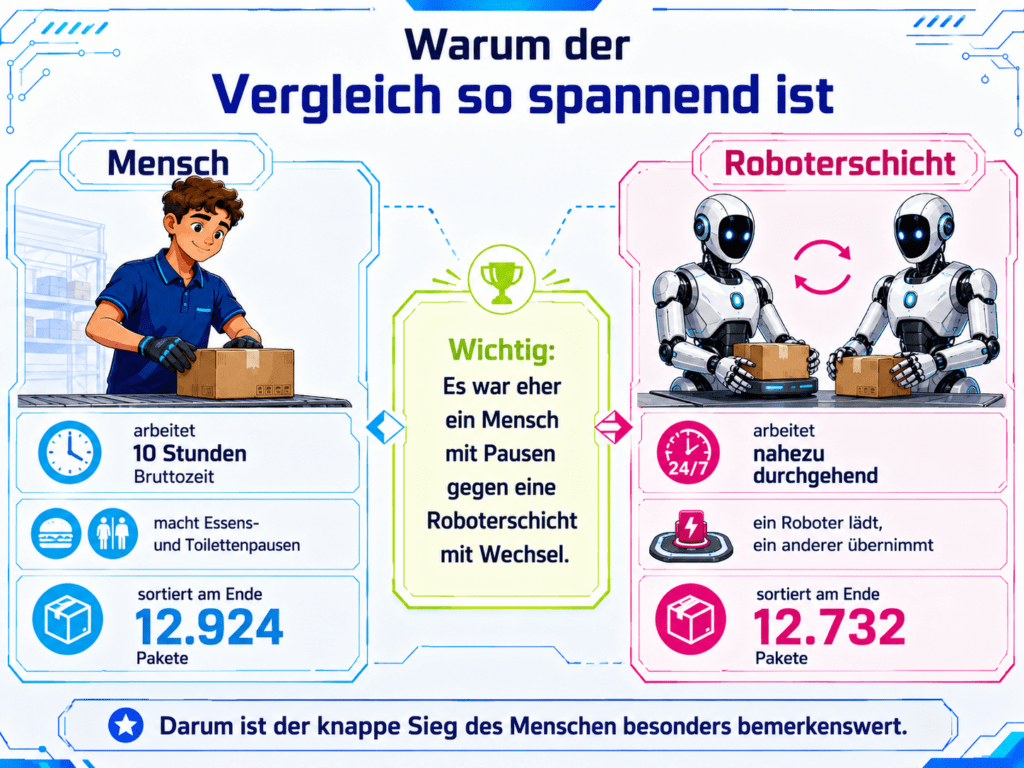
Hier muss man sehr genau sein. Aimé war ein Mensch und musste sich an normale Arbeitsregeln halten. Laut Business Insider hatte er Pausen, zum Beispiel für Essen, Toilette und kurze Erholung. Ungefähr nach fünf Stunden ging er zur Toilette – und genau da konnte der Roboter kurz in Führung gehen.
Die Roboterseite hatte einen anderen Vorteil: Sie konnte als durchgehender Robotereinsatz organisiert werden. Bei Figures Livestream sortierte ein Roboter, während andere Roboter auf Ladeplätzen standen und einspringen konnten, wenn der arbeitende Roboter Energie brauchte. Das heißt: Fair beschrieben war es eher ein Mensch mit Pausen gegen eine Roboterschicht mit Wechselmöglichkeit – nicht einfach ein einzelner Roboter, der zehn Stunden ohne jede Unterbrechung durchhielt.
Figure selbst schreibt, dass Figure 03 per induktivem Laden Energie bekommen kann. Die Ladespulen sitzen in den Füßen; der Roboter kann auf eine Ladestation treten. Für kommerzielle Einsätze beschreibt Figure sogar „near-continuous operation“, also nahezu durchgehenden Betrieb, wenn der Roboter zwischendurch auf eine Ladematte gehen kann.
Was ist Figure 03?
Figure 03 ist ein humanoider Roboter. „Humanoid“ bedeutet: Er ist ungefähr wie ein Mensch aufgebaut – mit Armen, Händen, Beinen und einem Körper. Das ist praktisch, weil viele Orte, Werkzeuge und Arbeitsplätze für Menschen gemacht sind.
Figure 03 nutzt laut Figure eine KI namens Helix. Du kannst dir Helix wie ein digitales Gehirn vorstellen, das Bilder, Sprache und Bewegungen zusammenbringt. Der Roboter soll also nicht nur „sehen“, sondern daraus auch passende Handlungen machen. Figure beschreibt außerdem bessere Kameras, Sensoren in den Fingern und Hände, die Dinge stabiler greifen sollen. Die Fingersensoren sollen sogar sehr kleine Kräfte erkennen können – etwa das Gewicht einer Büroklammer.
Warum ist der Test spannend?
Roboter in Fabriken gibt es schon lange. Viele davon sind aber fest montierte Roboterarme, die immer dieselbe Bewegung machen. Humanoide Roboter sind schwieriger: Sie sollen sich in einer Umgebung bewegen, die eigentlich für Menschen gebaut wurde.
Genau deshalb ist der Pakete-Test interessant. Er zeigt nicht alles, aber er zeigt eine wichtige Sache: Ein humanoider Roboter kann eine einfache, wiederholte Aufgabe über lange Zeit ziemlich schnell erledigen. Und wenn mehrere Roboter als Team eingesetzt werden, können sie Pausen, Laden und Wechsel besser organisieren als ein einzelner Mensch.
Was zeigt der Wettbewerb nicht?
Der Test bedeutet nicht, dass Roboter morgen alle Lagerjobs übernehmen. Ein echtes Lager ist viel komplizierter. Pakete können zerknittert, schwer, rutschig oder falsch beschriftet sein. Menschen laufen herum. Förderbänder stoppen. Manchmal muss man improvisieren.
Business Insider zitiert die Robotik-Expertin Ayanna Howard mit der Einschätzung, dass voll autonome humanoide Roboter in echten Logistikzentren noch ein weiter Weg sind. Als Probleme nennt der Bericht zum Beispiel falsch herum abgelegte Pakete oder Pakete, die vom Band gestoßen wurden.
Fazit
Der Mensch hat gewonnen – aber nur knapp. Aimé Gérard war schneller, obwohl er Pausen machen musste. Die Roboterseite konnte dagegen fast durchgehend arbeiten, weil Roboter beim Laden wechseln konnten. Genau das macht den Wettbewerb so spannend: Menschen sind bei einfachen Greifaufgaben noch erstaunlich stark. Aber Roboter holen auf – nicht unbedingt als einzelner Super-Roboter, sondern als gut organisiertes Team.
Die Zukunft wird deshalb wahrscheinlich nicht nur „Mensch gegen Maschine“ heißen. Viel wichtiger wird die Frage: Welche Aufgaben erledigen Roboter besser, welche Menschen – und wie arbeiten beide sicher zusammen?
FuxFun
Wusstest du, dass Zuschauer den Figure-Robotern im Livestream Spitznamen wie Bob, Frank und Gary gegeben haben? Aus einem Techniktest wurde dadurch fast eine kleine Roboter-Serie.
Für Profis
Mehr Details findest du in Figures offizieller Vorstellung von Figure 03 sowie im Bericht von Business Insider zum 10-Stunden-Wettbewerb. Besonders spannend sind die technischen Punkte zu Helix, den Fingersensoren und dem induktiven Laden.
Quellenverweis
Quellen: Figure AI: „Introducing Figure 03“; Business Insider: „Figure AI had one of its robots race an intern to sort packages. See who lost“; ursprünglicher Anlass: WinFuture-Bericht zum Figure-Wettbewerb.
Buchempfehlung
Mehr über Roboter und Künstliche Intelligenz erfährst du im Buch „Roboter & KI“ aus der SchlauFUX-Reihe vom Kosmos Verlag. Das Buch richtet sich an junge Entdeckerinnen und Entdecker und erklärt Robotik und KI kindgerecht.
https://www.kosmos.de/de/kosmos-schlaufux-roboter-und-ki_1182437_9783440182437