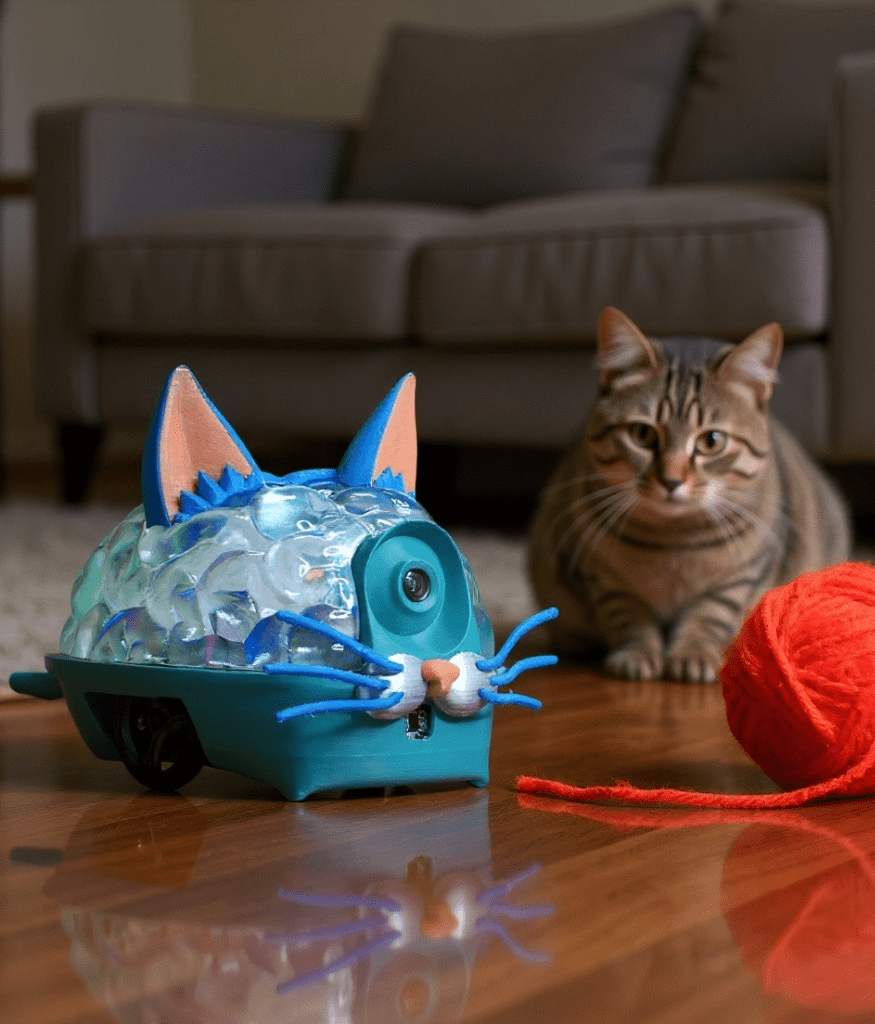
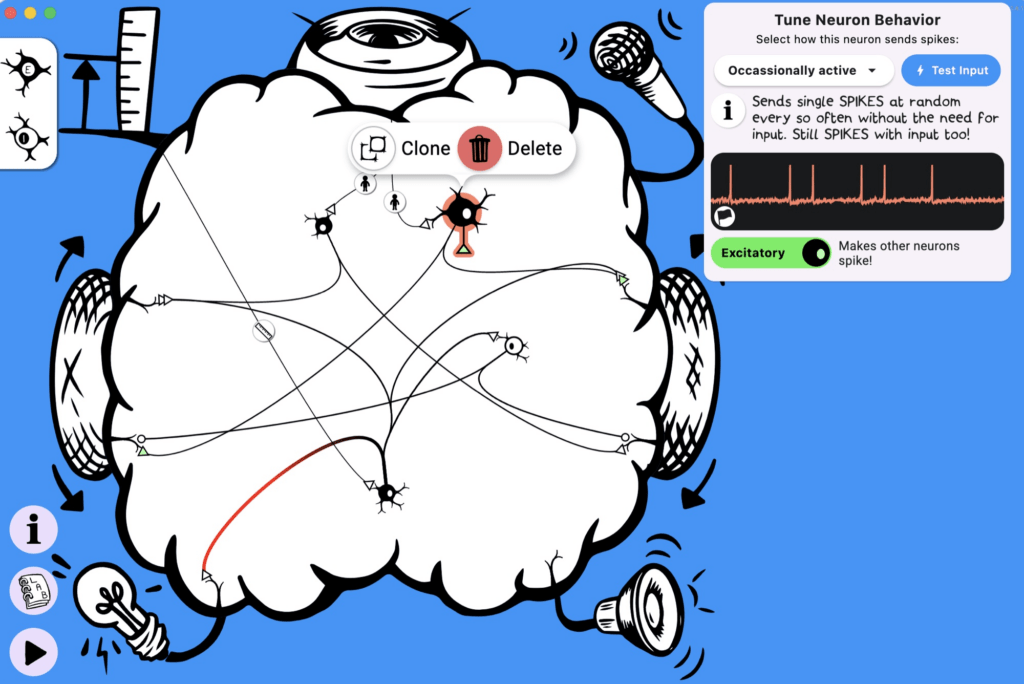
Backyard Brains launched SpikerBot on Kickstarter, a desktop robot whose behavior is controlled by spiking neural networks that kids build themselves. Instead of typing code or prompting a chatbot, students drag biologically inspired neurons into a no-code app, connect them to sensors and motors, and watch the robot move, react, speak, and change behavior in real time.
SpikerBot is designed to feel like a creature, not a robot. Wire visual neurons to the motors and it can chase a red ball. Change the connection and it can avoid that same object. Add sensors, sounds, inhibition, circuits that can hold short-lived internal states, or a second robot, and the behavior starts to feel less scripted and more alive. The point is not to memorize neuroscience vocabulary. The point is to test an idea, see what happens, and rebuild the brain until the creature behaves the way the child imagined.
That makes SpikerBot an educational robot with a concrete outcome: kids practice prediction, debugging, iteration, and critical thinking while learning how neurons and circuits shape behavior. It is built for families, classrooms, maker spaces, and curious adults who want a hands-on alternative to passive screen time and black-box AI tools.
SpikerBot grew out of years of NIH-supported research by Backyard Brains, the Ann Arbor company known for making neuroscience accessible outside the laboratory. In earlier classroom workshops using the neurorobotics platform, 295 high-school students built and tested robot brains over a one-week unit. The peer-reviewed study, published in Frontiers in Neurorobotics (doi.org/10.3389/fnbot.2020.00006), found significant gains in students‘ understanding of key neuroscience concepts and confidence in neuroscience.
„Kids do not need another device that gives them answers,“ said Greg Gage, co-founder and CEO of Backyard Brains. „They need something they can question, change, break, and fix with their own hands. SpikerBot makes the brain visible. You change a synapse, and the creature changes.“
The robot includes a camera, microphone, speaker, distance sensors, drive wheels, RGB LEDs, a customizable body shell, and a free SpikerBot app with pre-built brain examples. Learners can start with simple predator, explorer, reflex, or shy-creature circuits, then take them apart and build their own. Advanced users can hack the open-source platform and connect external sensors, game controllers, or Backyard Brains SpikerBit Brain-Machine Interface product.
Backyard Brains‘ SpikerBot development was supported by the National Institutes of Health through NINDS SBIR Phase II grant 2R44NS108850-03A1. „Public science funding helped us turn a research idea into something students can hold, test, and understand,“ Gage said. „Kickstarter is the path to move it from final development into the hands of families and teachers.“
SpikerBot is available on Kickstarter beginning May 12, 2026. Early-bird pledges begin at $199, with standard Kickstarter pledges at $239 and a planned retail price of $300. Units are expected to ship in September 2026. The recommended age range is 10 to 99.
ABOUT BACKYARD BRAINS
Backyard Brains was founded in 2009 in Ann Arbor, Michigan, to make neuroscience accessible. The company builds hands-on tools that let students, teachers, families, and curious citizens investigate the nervous system directly. Its products and curricula are used in classrooms, labs, makerspaces, and homes around the world, supported by grants from the NIH, NSF, and the Department of Defense, and have been featured in The New York Times, BBC, WIRED, TED, Netflix, NPR, Science Friday, Good Morning America, and Last Week Tonight.
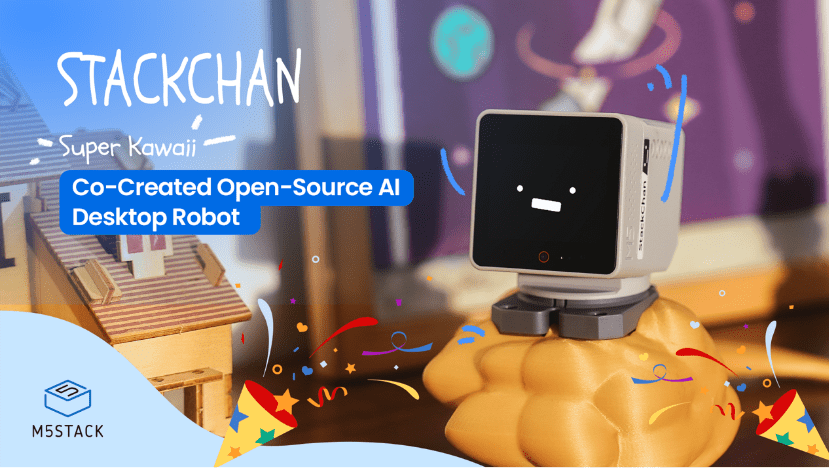
January, 2026 — M5Stack, a global leader in modular IoT and embedded development platforms, today launched StackChan, the first community-co-created open-source AI desktop robot, built on a proven ESP32 platform and designed to be endlessly hackable by makers worldwide.
Unlike closed, concept-driven AI robots, StackChan exposes its hardware, firmware, and interaction logic from day one — turning a playful desktop companion into a real development platform.
StackChan is now live on Kickstarter with a $65 Super Early Bird offer available for the first 72 hours.
From Community to the Globe: How StackChan Was Born
Before its official launch by M5Stack, StackChan had already existed as a community-driven project since 2021. Built on M5Stack standard controller, Core series, it began as a personal open-source project by maker Shinya Ishikawa, sustained and shaped through ongoing community contributions.
As more enthusiasts joined the project, contributors like Takao, who helped popularize the DIY kits, and Robo8080, who introduced AI capabilities, played key roles in expanding StackChan beyond its original form.
Inspired by StackChan’s expandability and creative potential, M5Stack officially brought the project to life as its first ready-to-play yet endlessly hackable desktop robot—while keeping its community-driven spirit at the core.
What Remains: Core Computing & Interaction Capabilities
As with the original version,StackChan continues to use the M5Stack flagship Core Series (CoreS3) as its main controller. CoreS3 is powered by an ESP32-S3 SoC with a 240 MHz dual-core processor, 16 MB Flash, and 8 MB PSRAM, and supports both Wi-Fi and BLE connectivity.
To enable richer interactions, the main unit integrates a 2.0-inch capacitive touch display, a 0.3 MP camera, a proximity sensor, a 9-axis IMU (accelerometer + gyroscope + magnetometer). It also includes a microSD card slot, a 1W speaker, dual microphones, and power/reset buttons. Together, these hardware components form a solid foundation for StackChan’s audio-visual interactive experiences.
What’s New: Ready-to-Play Functions Powered by Advanced Hardware
For the robot body, several advancements have been made to make it easier to get hands-on and improve the out-of-box experience. It features:
Power & connectivity: A USB-C interface for both power and data, paired with a built-in 700 mAh battery.
Movement system: 2 feedback servos supporting 360° continuous rotation on the horizontal axis and 90° vertical tilt—enabling expressive movements with real-time position feedback.
Visual feedback: 2 rows totaling 12 RGB LEDs for expressive system and interaction feedback.
Sensors & interaction: Infrared transmission and reception, a three-zone touch panel, and a full-featured NFC module enabling touch- and identity-based interactions.
On the software side, StackChan is ready-to-play for starters with no coding required. The pre-installed factory firmware delivers:
Expressive faces and motions: Preloaded with vivid facial expressions and coordinated movements that bring personality and liveliness to StackChan.
Built-in AI agent: Integrates an AI agent for natural voice-based interaction and conversational experiences.
App-based remote interaction: Supports official iOS app for video calls, remote avatar control, and real-time interaction with StackChan.
Chan-to-Chan Friends Map: Enables discovery of nearby StackChan devices, unlocking playful multi-device and social interaction scenarios.
Open for customization: While beginner-friendly by default, the firmware supports further development via Arduino and UiFlow2, making it easy to create custom applications.
100% Open-Source: Built to Be Customized and Extended
In an era filled with closed, concept-driven “AI robot” products, StackChan stands out with its open-source core. From firmware and hardware interfaces to development tools, every layer is designed to be explored, modified, and extended by users.
Beyond code, StackChan also encourages physical customization. With 3D printing and creative accessories, users can personalize their StackChan’s appearance and turn it into a unique desktop companion.
Fun with Global Community: Share, Extend, and Evolve Together
Since its birth, StackChan has grown into a vibrant global community of makers, developers, and enthusiasts. From sharing projects and source code online to hosting meetups and anniversary events offline, the community continues to expand what StackChan can be.
Owning a StackChan is not just about building a robot—it’s about being part of an open ecosystem where ideas and creativity evolve together.
StackChan is not built to its end at launch. It is built to grow—through open technology, creative experimentation, and a global community that continues to redefine what a desktop robot can be.
3D-printed robot becomes simpler, smarter, and even more flexible
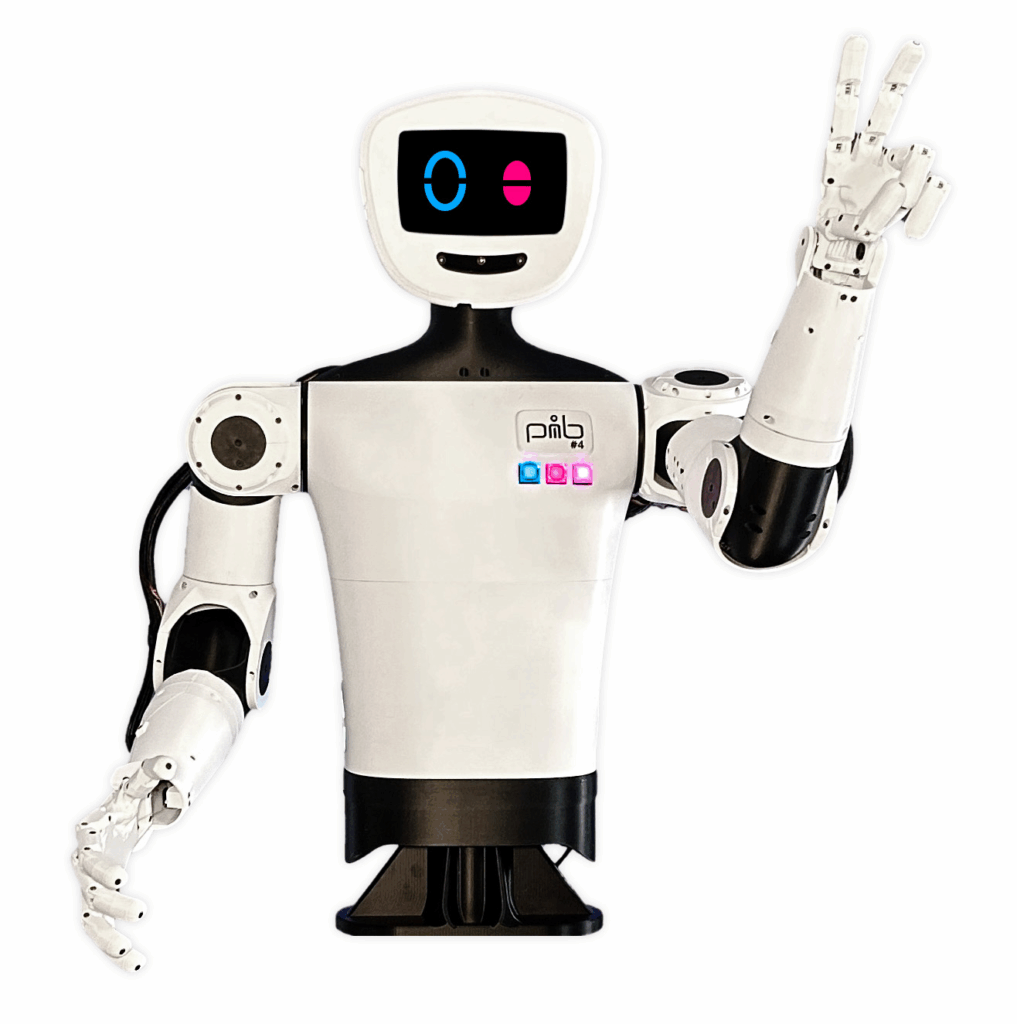
Nuremberg, November 11, 2025 +++ The fourth version of pib (printable intelligent bot) is now available. The humanoid open-source robot can be 3D-printed, built, programmed, and enhanced with AI by anyone. All 3D printing files and assembly instructions are freely available on the project website, with support and exchange provided by a community of more than 1,800 members. The project has already received several prestigious awards, including the German Design Award 2025 and the German Innovation Award 2025.
pib – the robot from the 3D printer
The humanoid robot pib was developed by isento GmbH in Nuremberg and is aimed at tech enthusiasts, educational institutions, and maker communities. Using a standard 3D printer, all mechanical components can be produced. All STL files, material lists, and detailed assembly guides are freely available.
pib combines a modular humanoid structure with servo motors, sensors, and open software components. It can be printed, assembled, programmed, and customized. As an open-source project, pib offers an accessible entry point into robotics and AI—free from high costs and proprietary systems. The international community continuously drives its development forward, making pib ideal for makers, research, and education. The goal: to make robotics and AI accessible to everyone and to lower entry barriers sustainably.
Simplified design thanks to community feedback
The new version features a significantly simpler and more flexible design. Motor calibration has been made easier, and access to the electronics and power button is now more convenient. Many of these improvements are direct results of valuable feedback from the active community.
New technology and features
pib now includes a microphone array that not only improves audio quality but also detects the direction of sound. New speakers provide a more natural interaction experience and feature blue accent lighting as a design highlight. Three programmable RGB buttons on the torso allow for customizable control commands.
Open robotics for everyone
“With pib, we pursue the vision of making robotics accessible to everyone. The new release demonstrates how open source drives innovation: a humanoid robot that anyone can build, extend, and understand. We’re especially proud that many improvements came directly from our community’s valuable feedback,” says Dr. Jürgen Baier, Co-Founder and CEO of pib.rocks.
From the workbench to the classroom
pib appeals equally to makers, robotics enthusiasts, and AI tinkerers. Beyond that, the robot is already being used in more than 70 schools and educational institutions—as a cross-disciplinary learning platform for future-focused topics such as robotics, 3D printing, and artificial intelligence.
More information, building plans, and guides: www.pib.rocks
The Avishkaar ABot Advanced Kit is a comprehensive DIY kit for STEM robotics and coding designed specifically for children aged 8 and up. It contains over 60 parts, including metal parts, motors, sensors, wheels, USB cables, screws, nuts, an Allen wrench, and a wrench. With these parts, children can build 10 different robots, from simple vehicles to more complex constructions The set reminded me of the mBot when I set it up, as it was also based on a sturdy metal construction. The included stickers and the tool are nice. The instructions were easy to understand and I didn’t find any errors or had any problems assembling. The app for remote control and programming must be activated with the product code and the user must be registered before using it for the first time. When deploying, e.g. in the classroom, you should have done this in advance. By the way, the 9V block battery visible in the video is not included when purchased from a dealer, but a full-fledged battery pack. I only use the 9V battery because of delivery problems. Overall, however, it is interesting that the robot makes this possible at all. I’m playing with the idea of connecting a solar cell here and operating the robot with solar energy…like a real Mars rover…
Here is more detailed information:
Easy to build programmable robots: With this kit, kids can create 10 different robots with over 60 pieces. This includes metal parts, an easily programmable brain, motors, sensors (2x light sensor, 1x touch sensor/button), wheels, USB cables, screws, nuts, an Allen key, a wrench, cables, and instructions.
Control via mobile app: The robots can be controlled via a remote control app. They can also be programmed using a visual block-based programming environment (similar to Scratch/Blockly).
Learning Objectives: With the ABot Advanced Kit, children learn robotics, programming, construction, mechanical design and problem solving.
Compatibility: The mobile app is compatible with iOS 11 or later and Android 10 or later.
Inexpensive Kit: The ABot Advanced Kit offers a sturdy metal frame to which motors and sensors can be attached. For the equivalent of about 60€, the set offers good value for money. Maybe the set will soon be available at a German retailer.
You can find a comprehensive assembly video of one of the 10 robot models here:
Robotistan, a pioneer in innovative educational solutions, has introduced a new STEM robot called BerryBot. Designed to help children develop coding and robotics skills, this creative and educational robot offers practical experiences in science, technology, engineering, and mathematics (STEM).
A New Era in Robotics Education
BerryBot is more than just a robot; it’s a learning platform that nurtures creativity and problem-solving skills. With its compact and customizable design, BerryBot allows users to paint and personalize their robot, thanks to its wooden body.
The wooden structure not only reflects an eco-friendly design approach but also allows children to shape their robots according to their own style. BerryBot is designed to be flexible enough for both classroom and home use.
Key Features
BerryBot’s innovative features support the development of both technical and creative skills:
Customizable Wooden Body:
Kids can paint their robots to reflect their unique style.
Durable and sustainable construction.
Versatile Coding Options:
Block-based programming for beginners.
Advanced programming with Python and Arduino IDE.
User-friendly interface for an easy learning process.
Multi-Mode Movement:
Line-following, sumo, and free movement modes.
Real-time visual feedback via the LED matrix display.
Wireless control through Bluetooth connectivity.
An Educational Tool Combining Coding Skills with Creativity
BerryBot offers young aspiring engineers a fun and educational experience. While creating different movement scenarios, children not only enhance their problem-solving skills but also develop creative projects.
Thanks to BerryBot’s multi-mode structure, users can program the robot’s movement capabilities in various ways. This feature transforms BerryBot from being just a toy to a valuable educational tool that encourages creative thinking.
Mehmet Akçalı, Marketing and Product Director at Robotistan, highlighted the educational features of BerryBot:
„BerryBot offers a practical and fun way for children to step into the world of STEM. Combining coding skills with creative projects, this robot will become an indispensable educational tool for both teachers and parents.“
He also mentioned a special opportunity for early supporters:
„We’re thrilled to announce our Kickstarter campaign, where backers can take advantage of the Early Bird offer. Additionally, as part of our commitment to supporting STEM education, for every 10 pledges, we will gift one BerryBot to a school or an educational organization in need. This way, our supporters not only get an amazing educational robot but also help inspire the next generation of young innovators.“
Shaping the Engineers of the Future
As the importance of STEM education continues to grow, innovative tools like BerryBot are preparing young minds for the future. With its fun yet educational nature, BerryBot strengthens children’s coding, algorithmic thinking, and problem-solving skills while also inspiring creative projects.
Robotistan emphasizes that BerryBot is not just an educational robot but also a platform where children can express themselves. Produced with this vision in mind, BerryBot is ready to make a difference both at home and in educational environments.
To learn more about BerryBot and to be among the first to own it and take advantage of the Early Bird offer, visit the Kickstarter page!
AI-driven drone from University of Klagenfurt uses IDS uEye camera for real-time, object-relative navigation—enabling safer, more efficient, and precise inspections.
High-voltage power lines. Electricity distribution station. high voltage electric transmission tower. Distribution electric substation with power lines and transformers.
The inspection of critical infrastructures such as energy plants, bridges or industrial complexes is essential to ensure their safety, reliability and long-term functionality. Traditional inspection methods always require the use of people in areas that are difficult to access or risky. Autonomous mobile robots offer great potential for making inspections more efficient, safer and more accurate. Uncrewed aerial vehicles (UAVs) such as drones in particular have become established as promising platforms, as they can be used flexibly and can even reach areas that are difficult to access from the air. One of the biggest challenges here is to navigate the drone precisely relative to the objects to be inspected in order to reliably capture high-resolution image data or other sensor data.
A research group at the University of Klagenfurt has designed a real-time capable drone based on object-relative navigation using artificial intelligence. Also on board: a USB3 Vision industrial camera from the uEye LE family from IDS Imaging Development Systems GmbH.
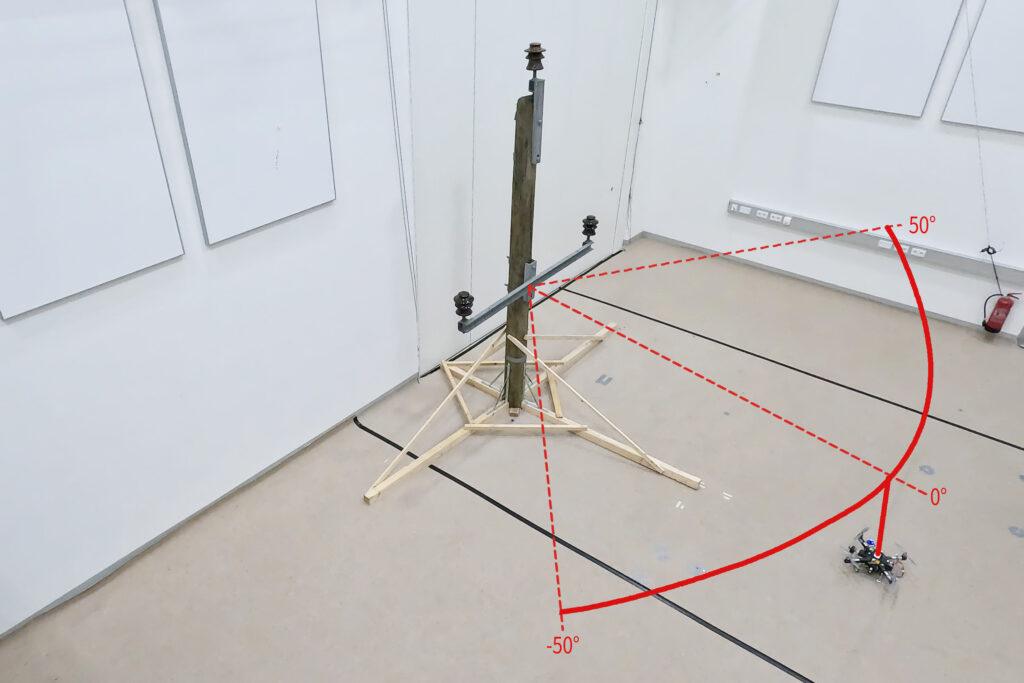
As part of the research project, which was funded by the Austrian Federal Ministry for Climate Action, Environment, Energy, Mobility, Innovation and Technology (BMK), the drone must autonomously recognise what is a power pole and what is an insulator on the power pole. It will fly around the insulator at a distance of three meters and take pictures. „Precise localisation is important such that the camera recordings can also be compared across multiple inspection flights,“ explains Thomas Georg Jantos, PhD student and member of the Control of Networked Systems research group at the University of Klagenfurt. The prerequisite for this is that object-relative navigation must be able to extract so-called semantic information about the objects in question from the raw sensory data captured by the camera. Semantic information makes raw data, in this case the camera images, „understandable“ and makes it possible not only to capture the environment, but also to correctly identify and localise relevant objects.
In this case, this means that an image pixel is not only understood as an independent colour value (e.g. RGB value), but as part of an object, e.g. an isolator. In contrast to classic GNNS (Global Navigation Satellite System), this approach not only provides a position in space, but also a precise relative position and orientation with respect to the object to be inspected (e.g. „Drone is located 1.5m to the left of the upper insulator“).
The key requirement is that image processing and data interpretation must be latency-free so that the drone can adapt its navigation and interaction to the specific conditions and requirements of the inspection task in real time.
Thomas Jantos with the inspection drone – Photo: aau/Müller
Semantic information through intelligent image processing Object recognition, object classification and object pose estimation are performed using artificial intelligence in image processing. „In contrast to GNSS-based inspection approaches using drones, our AI with its semantic information enables the inspection of the infrastructure to be inspected from certain reproducible viewpoints,“ explains Thomas Jantos. „In addition, the chosen approach does not suffer from the usual GNSS problems such as multi-pathing and shadowing caused by large infrastructures or valleys, which can lead to signal degradation and thus to safety risks.“
A USB3 uEye LE serves as the quadcopter’s navigation camera
How much AI fits into a small quadcopter? The hardware setup consists of a TWINs Science Copter platform equipped with a Pixhawk PX4 autopilot, an NVIDIA Jetson Orin AGX 64GB DevKit as on-board computer and a USB3 Vision industrial camera from IDS. „The challenge is to get the artificial intelligence onto the small helicopters.
The computers on the drone are still too slow compared to the computers used to train the AI. With the first successful tests, this is still the subject of current research,“ says Thomas Jantos, describing the problem of further optimising the high-performance AI model for use on the on-board computer.
The camera, on the other hand, delivers perfect basic data straight away, as the tests in the university’s own drone hall show. When selecting a suitable camera model, it was not just a question of meeting the requirements in terms of speed, size, protection class and, last but not least, price. „The camera’s capabilities are essential for the inspection system’s innovative AI-based navigation algorithm,“ says Thomas Jantos. He opted for the U3-3276LE C-HQ model, a space-saving and cost-effective project camera from the uEye LE family. The integrated Sony Pregius IMX265 sensor is probably the best CMOS image sensor in the 3 MP class and enables a resolution of 3.19 megapixels (2064 x 1544 px) with a frame rate of up to 58.0 fps. The integrated 1/1.8″ global shutter, which does not produce any ‚distorted‘ images at these short exposure times compared to a rolling shutter, is decisive for the performance of the sensor. „To ensure a safe and robust inspection flight, high image quality and frame rates are essential,“ Thomas Jantos emphasises. As a navigation camera, the uEye LE provides the embedded AI with the comprehensive image data that the on-board computer needs to calculate the relative position and orientation with respect to the object to be inspected. Based on this information, the drone is able to correct its pose in real time.
The IDS camera is connected to the on-board computer via a USB3 interface. „With the help of the IDS peak SDK, we can integrate the camera and its functionalities very easily into the ROS (Robot Operating System) and thus into our drone,“ explains Thomas Jantos. IDS peak also enables efficient raw image processing and simple adjustment of recording parameters such as auto exposure, auto white Balancing, auto gain and image downsampling.
To ensure a high level of autonomy, control, mission management, safety monitoring and data recording, the researchers use the source-available CNS Flight Stack on the on-board computer. The CNS Flight Stack includes software modules for navigation, sensor fusion and control algorithms and enables the autonomous execution of reproducible and customisable missions. „The modularity of the CNS Flight Stack and the ROS interfaces enable us to seamlessly integrate our sensors and the AI-based ’state estimator‘ for position detection into the entire stack and thus realise autonomous UAV flights. The functionality of our approach is being analysed and developed using the example of an inspection flight around a power pole in the drone hall at the University of Klagenfurt,“ explains Thomas Jantos.
Visualisation of the flight path of an inspection flight around an electricity pole model with three insulators in the research laboratory at the University of Klagenfurt
Precise, autonomous alignment through sensor fusion The high-frequency control signals for the drone are generated by the IMU (Inertial Measurement Unit). Sensor fusion with camera data, LIDAR or GNSS (Global Navigation Satellite System) enables real-time navigation and stabilisation of the drone – for example for position corrections or precise alignment with inspection objects. For the Klagenfurt drone, the IMU of the PX4 is used as a dynamic model in an EKF (Extended Kalman Filter). The EKF estimates where the drone should be now based on the last known position, speed and attitude. New data (e.g. from IMU, GNSS or camera) is then recorded at up to 200 Hz and incorprated into the state estimation process.
The camera captures raw images at 50 fps and an image size of 1280 x 960px. „This is the maximum frame rate that we can achieve with our AI model on the drone’s onboard computer,“ explains Thomas Jantos. When the camera is started, an automatic white balance and gain adjustment are carried out once, while the automatic exposure control remains switched off. The EKF compares the prediction and measurement and corrects the estimate accordingly. This ensures that the drone remains stable and can maintain its position autonomously with high precision.
Electricity pole with insulators in the drone hall at the University of Klagenfurt is used for test flights
Outlook „With regard to research in the field of mobile robots, industrial cameras are necessary for a variety of applications and algorithms. It is important that these cameras are robust, compact, lightweight, fast and have a high resolution. On-device pre-processing (e.g. binning) is also very important, as it saves valuable computing time and resources on the mobile robot,“ emphasises Thomas Jantos.
With corresponding features, IDS cameras are helping to set a new standard in the autonomous inspection of critical infrastructures in this promising research approach, which significantly increases safety, efficiency and data quality.
The Control of Networked Systems (CNS) research group is part of the Institute for Intelligent System Technologies. It is involved in teaching in the English-language Bachelor’s and Master’s programs „Robotics and AI“ and „Information and Communications Engineering (ICE)“ at the University of Klagenfurt. The group’s research focuses on control engineering, state estimation, path and motion planning, modeling of dynamic systems, numerical simulations and the automation of mobile robots in a swarm: More information
uEye LE – the cost-effective, space-saving project camera Model used:USB3 Vision Industriekamera U3-3276LE Rev.1.2 Camera family: uEye LE
The HP Robots Otto is a versatile, modular robot designed specifically for educational purposes. It offers students and teachers an exciting opportunity to immerse themselves in the world of robotics, 3D printing, electronics and programming. The robot was developed by HP as part of their robotics initiative and is particularly suitable for use in science, technology, engineering and mathematics (STEM) classes.
Key features of Otto:
Modular design: Otto is a modular robot that allows students to build, program and customize it through extensions. This promotes an understanding of technology and creativity. The modular structure allows various components such as motors, sensors and LEDs to be added or replaced, which increases the learning curve for students.
Programmability: The robot can be programmed with various programming languages, including block-based programming for beginners and Python and C++ for advanced programmers. This diversity allows students to continuously improve their coding skills and adapt to the complexity of the tasks.
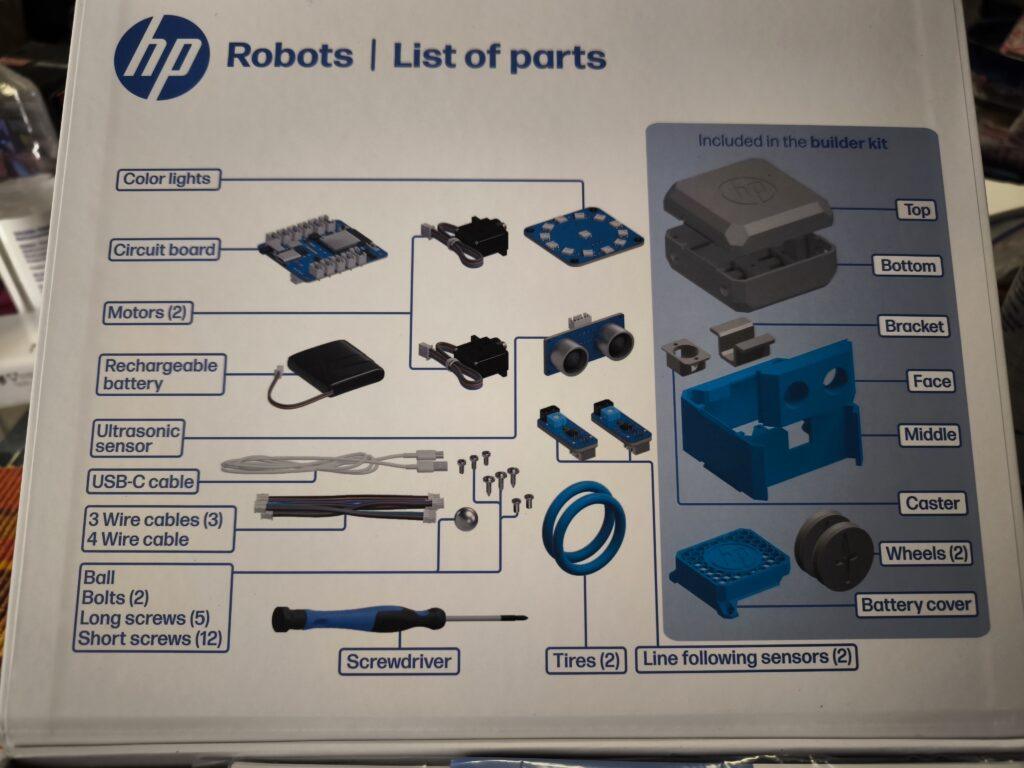
Sensors and functions: Equipped with ultrasonic sensors for obstacle detection, line tracking sensors and RGB LEDs, Otto offers numerous interactive possibilities. These features allow students to program complex tasks such as navigating courses or tracing lines. The sensors help to detect the environment and react accordingly.
3D printing and customizability: Students can design Otto’s outer parts themselves and produce them with a 3D printer. This allows for further personalization and customization of the robot. This creative freedom not only promotes technical understanding, but also artistic skills. Own parts can be designed and sensors can be attached to desired locations.
Educational approach:
Otto is ideal for use in schools and is aimed at students from the age of 8. Younger students can work under supervision, while older students from the age of 14 can also use and expand the robot independently. The kit contains all the necessary components to build a functioning robot, including motors, sensors, and a rechargeable battery.
Programming environments:
Otto is programmed via a web-based platform that runs on all operating systems. This platform offers different modes:
Block-based programming: Similar to Scratch Jr., ideal for beginners. This visual programming makes it easier to get started in the world of programming and helps students understand basic concepts such as loops and conditions.
Python: A Python editor is available for advanced users. Python is a popular language that works well for teaching because it is easy to read and write. Students can use Python to develop more complex algorithms and expand their programming skills.
C++: Compatible with the Arduino IDE for users who have deeper programming knowledge. C++ offers a high degree of flexibility and allows students to access the hardware directly, allowing for their own advanced projects.
Expansion Kits:
In addition to the Starter Kit, there are several expansion kits. All expansion kits require the starter kit, as they are built on top of it.
Emote Expansion Kit:
It includes components such as an LED matrix display, OLED display, and an MP3 player that allow the robot to display visual and acoustic responses.
This kit is particularly suitable for creative projects where Otto should act as an interactive companion.
The emote kit allows Otto to show emotions, mirror human interactions, and develop different personalities.
Sense Expansion Kit:
With the Sense Kit, Otto can perceive its surroundings through various sensors.
Included are sensors for temperature, humidity, light and noise as well as an inclination sensor. These enable a wide range of interactions with the environment.
The kit is ideal for projects that focus on environmental detection and data analysis.
Interact Expansion Kit:
The Interact kit expands Otto’s tactile interaction capability through modules such as push buttons, rotary knobs and accelerometers.
It enables precise inputs and reactions, as well as measurement of acceleration.
This kit is great for playful activities and interactive games.
Invent Expansion Kit:
The Invent kit is specifically designed to encourage users‘ creativity. It allows the individual adaptation of Otto’s functionalities and design through 3D printing and additional modules as well as compatible clamping blocks.
Users can design and print new accessories to make the robot unique.
Equip Otto with legs and teach him to walk or make him fit for outdoor use off-road with chains.
Use in the classroom:
Otto comes with extensive resources developed by teachers. These materials help teachers design effective STEM lessons without the need for prior knowledge. The robot can be used both in the classroom and at home. The didactic materials include:
Curricula: Structured lesson plans that help teachers plan and execute lessons.
Project ideas and worksheets: A variety of projects that encourage students to think creatively and expand their skills.
Tutorials and videos: Additional learning materials to help students better understand complex concepts.
Conclusion:
The HP Robots Otto is an excellent tool for fostering technical understanding and creativity in students. Thanks to its modular design and diverse programming options, it offers a hands-on learning experience in the field of robotics and electronics. Ideal for use in schools, Otto provides teachers with a comprehensive platform to accompany students on an exciting journey into the world of technology. In particular, Otto’s versatility through the 3D-printed parts and expansion packs offers the opportunity to build the personal learning robot.
The world of robotics is evolving – and right in the middle of it: pib. This humanoid robot, entirely 3D-printable, has received a prestigious award. The German Design Award 2025 has been granted to the printable intelligent bot, recognizing not only its technological sophistication but also its innovative design. But what makes pib so special?
A Robot for Everyone – and by Everyone
Imagine a robot that anyone can build and program themselves. A robot that isn’t just a technical gadget but an inspiration to create, research, and explore new paths in robotics. That’s exactly what pib is. Its open-source approach has a central goal: to make robotics and AI more accessible while breaking down technological barriers. Whether you’re a tinkerer, a student, or simply a technology enthusiast, pib invites everyone to be part of its ever-growing community.
German Design Award 2025: Recognition for Visionary Product Design
The German Design Award is one of the most prestigious awards for outstanding design. Every year, an international panel of experts honors innovative concepts in product design, communication, and architecture. This year, pib impressed the jury with its “Excellent Product Design” in the category „AI in Product Design Processes“ – a testament to how technology and aesthetics can go hand in hand.
Technology Meets Creativity
pib is more than just a robot – it is a platform for innovative technologies. The project enables curious minds to experiment with 3D printing, robotics, and artificial intelligence in a playful and hands-on way. No prior knowledge is required; anyone can contribute, co-create, and learn. The community plays a crucial role: the newly designed, human-like body that won the German Design Award was developed by a community member using CAD software.
Jürgen Baier, founder of pib, is thrilled about the recognition: „We are proud that pib has won the German Design Award! For us, this confirms that we are on the right path to making robotics and AI more accessible and tangible for everyone. It’s great to see that our vision of inspiring people to create and explore resonates so well.“
Learning with pib: Schools and Media Centers Adopt the Humanoid Robot
But it’s not just the maker community that’s excited about pib. More than 35 schools and media centers are already using it as an innovative learning platform. Students and teachers alike are leveraging this humanoid robot to explore future technologies in an interactive, hands-on manner. The focus goes beyond technical skills to include creative problem-solving and teamwork. By bringing knowledge to life, pib makes robotics and AI tangible – opening doors to the careers of tomorrow.
Open Source and Limitless Possibilities
Behind pib stands isento GmbH, a Nuremberg-based company specializing in software development and AI solutions. However, the robot thrives not only due to the work of isento employees but also through the contributions of its community. 3D printing files, detailed assembly instructions, programming code, AI skills, and a knowledge database are all freely available online – an open invitation to help shape the future of robotics.
Winning the German Design Award is a well-deserved honor for pib. But for this project, the award means much more: it is motivation to push the boundaries of what’s possible with open-source robotics even further. So if you’ve ever wondered how to create your own humanoid robot – pib has the answer.