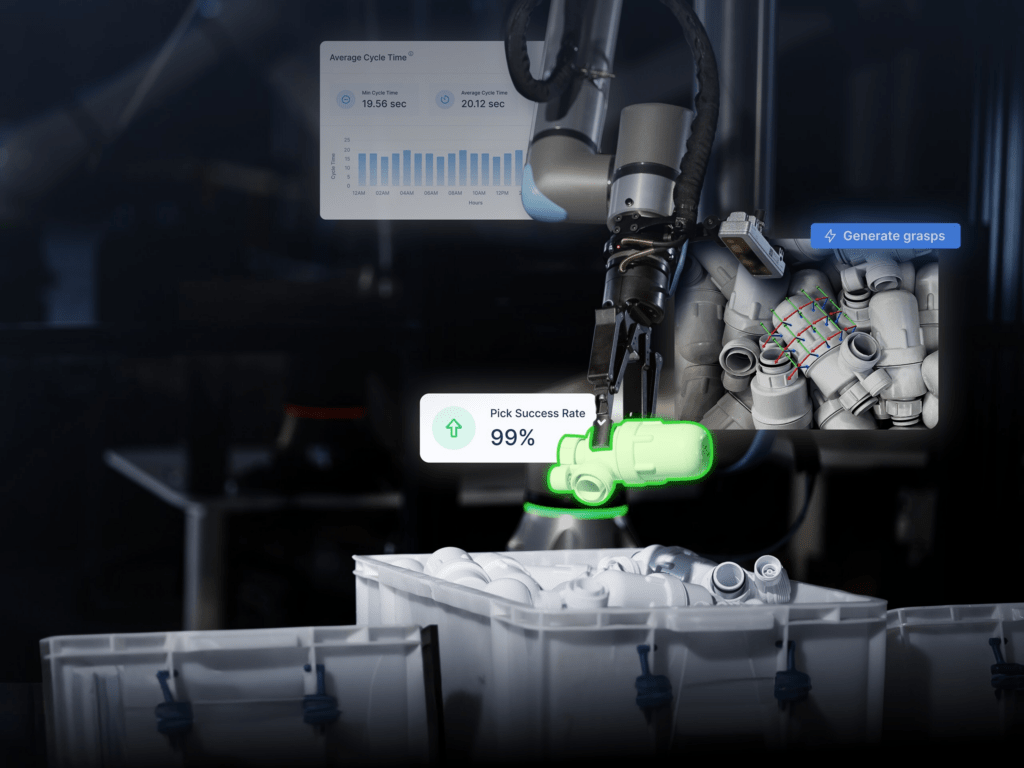
MONTREAL, 10. Februar 2026 /PRNewswire/ — Vention, das Unternehmen hinter der KI-gestützten Software- und Hardwareplattform für Automatisierung und Robotik, gab heute die Einführung von GRIIP (Generalized Robotic Industrial Intelligence Pipeline) bekannt. Dabei handelt es sich um eine End-to-End-Pipeline für physische KI, die den Einsatz autonomer Roboterzellen in hochgradig unstrukturierten Fertigungsumgebungen ermöglicht. GRIIP markiert einen fundamentalen Wandel von der aufgabenspezifischen Robotik hin zu einer generalisierten Intelligenz, die anwendungsübergreifend skalierbar ist.
Die GRIIP-Pipeline: End-to-End-Intelligenz
GRIIP liefert eine einheitliche Pipeline von der Wahrnehmung bis zur Bewegung, indem sie Ventions proprietäre Modelle mit offenen NVIDIA Isaac-Modellen integriert – insbesondere NVIDIA FoundationStereo für das Stereo-Matching und NVIDIA FoundationPose für die Lageerkennung. Die Pipeline übernimmt automatisch die Szenendigitalisierung und Kalibrierung, Objekterkennung und -segmentierung, 6DOF-Pose-Estimation, Greifpunktbewertung sowie die kollisionsfreie Pfadplanung und passt sich ohne manuelle Konfiguration an die realen Bedingungen an.
Die Architektur entwickelt sich durch die Nutzung neuester Physical-AI-Modelle kontinuierlich weiter und verbessert die Leistung im Laufe der Zeit ohne Hardware-Upgrades oder manuelle Eingriffe. Software-Updates werden über MachineMotion AI durchgeführt, wahlweise via WLAN oder integrierter LTE-Konnektivität.
Produktionsbereite Leistung und bewährte Zuverlässigkeit
GRIIP liefert industrietaugliche Ergebnisse mit validierter Performance:
Konsistent zuverlässige Pick-Leistung im 24/7-Betrieb über drei Monate hinweg.
Zykluszeiten von bis zu fünf Teilen pro Minute werden ohne Leistungsabfall eingehalten.
Sub-Millimeter-Genauigkeit bei der Lageerkennung (Pose Estimation).
CAD-to-Pick-Setup in 15 Minuten, vollständige Implementierung in unter zwei Tagen.
Adaptive Performance über verschiedene Bauteilgeometrien und Materialeigenschaften hinweg, einschließlich Oberflächenbeschaffenheit, Transparenz und Umgebungsvariationen.
Im Gegensatz zu Physical-AI-Modellen früherer Generationen behält GRIIP die Spitzenleistung während des gesamten Betriebs bei.
Die KI-Pipeline ist sofort einsatzbereit ohne Trainingsdaten oder benutzerdefinierte Datensätze, sodass Hersteller direkt neue Roboterzellen implementieren und neue Teile ohne Programmierung hinzufügen können.
Automatisierung über Einzelaufgaben hinaus skalieren
GRIIP nutzt dieselbe Technologie für mehrere Aufgaben und Anwendungsfälle innerhalb einer Fabrik, darunter Bin-Picking, Maschinenbeschickung, Pick-and-Place am Förderband, Kitting, Palettierung und Schleifen. GRIIP läuft auf dem MachineMotion AI-Controller von Vention (powered by NVIDIA Jetson) und kann bestehende, traditionell programmierte Robotik-Anwendungen in autonome Abläufe umwandeln. Dies ermöglicht eine schnellere Projektabwicklung, einen höheren ROI und einen klaren Upgrade-Pfad für die Automatisierungsinfrastruktur.
Verfügbarkeit und Unternehmenseinsatz
Vention skaliert derzeit sein Demonstrationsprogramm für Kunden und arbeitet mit Unternehmenskunden zusammen, welche die Technologie für den Einsatz im Jahr 2026 evaluieren. Für technische Informationen oder um eine Demonstration zu vereinbaren, besuchen Sie https://vention.io/de/physical-ai-pipeline.
fischertechnik setzt einen weiteren Meilenstein in der technischen Bildung. Mit dem neuen Lernkonzept STEM Coding Ultimate AI wird es erstmals möglich, ein neuronales Netzwerk selbst zu trainieren und dessen Funktionsweise von Grund auf zu verstehen. Damit vermittelt fischertechnik jungen Menschen die Programmier- und KI-Kompetenzen der Zukunft – direkt im Klassenzimmer und ohne Cloud-Anbindung.
Der Baukasten STEM Coding Ultimate AI richtet sich an weiterführende Schulen und vermittelt handlungsorientiert die Grundlagen von maschinellem Lernen und KI-gestützter Robotik. Anhand von zwölf vielseitigen, zum Teil erweiterbaren Modellen setzen sich Schülerinnen und Schüler der Sekundarstufe II mit zentralen Fragestellungen der Informationstechnik und der Künstlichen Intelligenz auseinander. Ausgehend von realitätsnahen Szenarien entwickeln sie eigenständig Lösungen für komplexe, problemorientierte Aufgabenstellungen. Ein leistungsstarker Controller, moderne Sensoren und Aktoren, eine benutzerfreundliche App sowie die bewährten fischertechnik Bausteine ermöglichen einen praxisnahen Zugang zu fortgeschrittenen Technologien.
Erste Trainingsschritte lassen sich unmittelbar grafisch darstellen, sodass Lernende den Fortschritt nachvollziehen können. Anschließend können die trainierten Daten per Bluetooth oder über einen WLAN- oder USB-Anschluss an Roboter übertragen werden, die das Gelernte in realen Anwendungen sichtbar machen – beispielsweise nach dem Prinzip eines autonomen Fahrzeugs. Damit wird abstraktes Wissen greifbar, und aus Theorie entsteht erlebbare Praxis.
Lehrkräfte erhalten über didaktisches Begleitmaterial einen leichten Einstieg ins Thema.
Besonders wertvoll ist dieser Ansatz, weil er die sogenannten Future Skills wie projektorientiertes Arbeiten und Teamfähigkeit fördert, die in einer zunehmend digitalisierten Arbeitswelt unverzichtbar sind. Der Umgang mit Künstlicher Intelligenz, das Verständnis neuronaler Netze und die Fähigkeit, Daten eigenständig zu erfassen, zu analysieren und nutzbar zu machen, gehören zu den Schlüsselkompetenzen der kommenden Generation. Schülerinnen und Schüler lernen nicht nur die technischen Grundlagen, sondern entwickeln auch ein tiefes Verständnis dafür, wie KI Entscheidungen trifft. Sie erwerben Grundkenntnisse der neuronalen Netze und KI-Programmierung – ein Wissen, das weit über den schulischen Kontext hinaus Bedeutung hat. Darüber hinaus bauen die Schülerinnen und Schüler ihre Kenntnisse in Informatik und Robotik aus und lernen, die Funktionsweise von Aktoren und Sensoren zu verstehen.
Die Integration von Robo Pro Coding und der fischertechnik STEM Suite ermöglicht einen sanften Einstieg mit Blockly-Programmierung und zugleich den direkten Einblick in professionelle Programmiersprachen wie Python. Der neue Baukasten arbeitet lokal auf dem TXT 4.0 Controller – ganz ohne Cloud. Damit steht Schulen ein zukunftssicheres Werkzeug zur Verfügung, das über Jahre hinweg eingesetzt werden kann.
„Gemäß unserem Motto: wo Neugier Wissen wird, schaffen wir mit unserem Lernkonzept STEM Coding Ultimate AI für Schülerinnen und Schüler die Möglichkeit, Künstliche Intelligenz nicht nur zu konsumieren, sondern aktiv zu gestalten und zu verstehen“, erklärt Martin Rogler, Geschäftsführer fischertechnik. „Denn wer frühzeitig die Grundlagen der KI erlernt, besitzt morgen einen entscheidenden Vorteil in Studium, Beruf und Gesellschaft.“
Das Jahr 2025 markiert zugleich ein besonderes Jubiläum: 60 Jahre fischertechnik. Seit sechs Jahrzehnten inspiriert das Unternehmen Generationen von Tüftlern, Ingenieurinnen und Forschern, Technik spielerisch zu entdecken und zu verstehen. Der neue STEM Coding Ultimate AI Baukasten knüpft als Nachfolger des TXT Base Sets an diese Tradition an und führt sie in die Zukunft – mit einer Innovation, die die Faszination klassischer Baukästen mit den Technologien von morgen verbindet. Im Sinne der Nachhaltigkeit ist STEM Coding Ultimate AI zudem weiterhin kompatibel mit allen verfügbaren TXT 4.0 Base Set Add-Ons für Omniwheels, Industrial Robots, AI, IoT, Competition und Autonomous Driving.
Mit diesem Schritt leistet fischertechnik einen entscheidenden Beitrag zur Förderung von Kreativität und Problemlösungskompetenz sowie für das Verständnis von Zukunftstechnologien. So entsteht ein Produkt, das nicht nur den aktuellen Bildungsbedarf deckt, sondern auch den Geist der Marke seit 60 Jahren weiterträgt: Technik zum Anfassen, Verstehen und Gestalten.
Die RoboCup Weltmeisterschaft 2027 findet im Juni in Deutschland statt: Mit Nürnberg wurde zum Abschluss des RoboCup 2025 in Brasilien offiziell der Austragungsort für den weltweit renommiertesten Wettbewerb für intelligente Robotik bekanntgegeben. Damit holt Deutschland die internationale Robotik-Elite erstmals seit 2016 wieder ins eigene Land – und setzt ein starkes Zeichen für seine technologische Zukunftsfähigkeit.
Der RoboCup gilt als globaler Leuchtturm für Forschung und Entwicklung in Robotik und Künstlicher Intelligenz (KI). Jährlich messen sich hier die besten Teams aus Universitäten, Hochschulen für Angewandte Wissenschaften und Schulen in realitätsnahen Szenarien – von Fußball über Haushaltsrobotik bis zu Rettungs- und Industrieanwendungen. Deutschland gehört seit Jahren zur Weltspitze und ist nun wieder Gastgeber dieses einzigartigen Innovationswettbewerbs.
Strategische Bedeutung für den Standort Deutschland „Zentral für den Erfolg der Vergabe des RoboCup 2027 nach Nürnberg war die Unterstützung des Bundesministeriums für Forschung, Technologie und Raumfahrt, des Freistaats Bayern, der Stadt Nürnberg, des Robotics Institute Germany, der NEURA Robotics, der AFAG Messen und Ausstellungen GmbH, der Hans und Ria Messer Stiftung und nicht zuletzt des deutschen RoboCup-Komitees. Mit der Vergabe wird Deutschlands Rolle als international sichtbarer Impulsgeber für KI-basierte Robotik gestärkt“, erklärt Prof. Dr. Oskar von Stryk, Technische Universität Darmstadt, Co-Chair des RoboCup 2027. „Gerade vor dem Hintergrund des Fachkräftemangels und der demografischen Entwicklung brauchen wir innovative Technologien, die körperlich fordernde Arbeit intelligent unterstützen und zugleich dazu beitragen, Menschen in jeder Lebenslage ein selbstbestimmtes und unabhängiges Leben zu ermöglichen.“, ergänzt Dr. Maike Paetzel-Prüsmann, Johannes Gutenberg-Universität Mainz, Co-Chair des RoboCup 2027.
KI-basierte Robotik – sogenannte verkörperte Künstliche Intelligenz – ist entscheidend, um auch künftig Wohlstand, Wettbewerbsfähigkeit und Versorgungssicherheit zu garantieren. Der RoboCup beschleunigt die Entwicklung solcher Systeme, indem er Forschenden und Nachwuchstalenten eine reale Test- und Vergleichsplattform bietet – und Begeisterung für Technik und Innovation weckt.
Nachwuchsförderung und Gründergeist Die RoboCup-Weltmeisterschaft ist mehr als ein Technologiewettbewerb – sie ist Talentschmiede, Bildungsplattform und Sprungbrett für Start-ups. In den Junior-Ligen sammeln Schülerinnen und Schüler erste Erfahrungen mit Informatik und Mechatronik, in den Major-Ligen entwickeln Studierende und Promovierende komplexe autonome Systeme auf höchstem Niveau. Viele starten danach erfolgreiche Karrieren in Unternehmen oder gründen eigene technologiegetriebene Start-ups.
„Der RoboCup verbindet Hightech mit Bildung, Wissenschaft mit Praxis, internationalen Austausch mit regionaler Innovationskraft“, so Prof. Dr. Stefan May, Technische Hochschule Nürnberg Georg Simon Ohm, Local Chair des RoboCup 2027. „Nürnberg bietet dafür das ideale Umfeld – zentral gelegen, technologisch und wirtschaftlich stark vernetzt und mit einer lebendigen Wissenschafts- und Gründerszene.“
2027: Ein Meilenstein für Deutschland im Technologie-Wettlauf Mit Blick auf den internationalen Wettlauf um technologische Souveränität setzt die RoboCup-Weltmeisterschaft 2027 ein wichtiges Signal. Deutschland braucht hochqualifizierte Köpfe und starke Innovationsökosysteme, um langfristig unabhängig und wettbewerbsfähig zu bleiben. Der RoboCup leistet dazu einen entscheidenden Beitrag.
Dorothee Bär, Bundesministerin für Forschung, Technologie und Raumfahrt: „In der Verbindung von KI und Robotik steckt ein riesiges Potential für Deutschland und Europa. Deshalb haben wir uns in der Bundesregierung die Förderung dieser Schlüsseltechnologien in der Hightech Agenda Deutschland zum Ziel gesetzt. Mit dem bereits vom Bundesforschungsministerium geförderten Robotics Institute Germany und dessen Verbindung zum RoboCup unterstützen wir gezielt Spitzenforschung und Talente für die KI-basierte Robotik. Bereits 2024 und 2025 haben wir die RoboCup German Open daher auch finanziell gefördert. Und wir haben auch die Bewerbung für die Weltmeisterschaft unterstützt. Ich freue mich sehr, dass wir den RoboCup 2027 in Deutschland willkommen heißen.“
Dr. Markus Söder, Ministerpräsident des Freistaates Bayern: „Bayern ist bei Kl und Robotik einer der führenden Standorte Europas. Mit unserer Hightech Agenda investieren wir insgesamt sechs Milliarden Euro in Wissenschaft und Forschung. Damit soll etwa im ganzen Land ein einzigartiges Ökosystem für Künstliche Intelligenz wachsen. Das „Munich Center for Machine Learning“ und das „Munich Institute of Robotics and Machine Intelligence“ stehen für Künstliche Intelligenz von Weltrang – und in Nürnberg gründen wir mit der Technischen Universität UTN die erste rein auf Kl spezialisierte Universität in Deutschland. Die Staatsregierung freut sich auf die Austragung der RoboCup-Weltmeisterschaft 2027 in Nürnberg. Wir spielen in der Hightech-Champions-League – daher ist Bayern der perfekte Ort für den RoboCup!“.
Dr. Fabian Mehring, Bayerischer Staatsminister für Digitales: „Nürnberg ist unser bayerischer Leuchtturm für Robotik und Künstliche Intelligenz – mit der ersten eigenständigen KI-Universität Deutschlands und zahlreichen innovativen Forschungseinrichtungen. Die Stadt verfügt über eine starke Infrastruktur für internationale Veranstaltungen und engagiert sich aktiv für den wissenschaftlichen Nachwuchs. Ziel ist es, junge Talente zu begeistern und globale Netzwerke in Robotik und KI zu stärken. Ich freue mich darauf, die Teilnehmenden in Nürnberg willkommen zu heißen – für eine innovative Zukunft, die wir proaktiv und gemeinsam gestalten wollen.“
Prof. Dr. Tamim Asfour, Karlsruhe Institut für Technologie, Sprecher des Robotics Institute Germany (RIG): „Das RIG hat die Bewerbung Deutschlands für den RoboCup 2027 mit großem Nachdruck unterstützt. Als bundesweite Plattform führender Robotik- und KI-Institutionen – gefördert vom Bundesministerium für Forschung, Technologie und Raumfahrt – verbindet RIG Spitzenforschung, Talente und Wirtschaft, um bahnbrechende Innovationen voranzutreiben. Wettbewerbe wie der RoboCup sind starke Impulsgeber für Fortschritt und internationale Zusammenarbeit. Nach dem erfolgreichen Auftakt der German Robotics Conference gemeinsam mit den RoboCup German Open 2025 freuen wir uns darauf, die globale Robotik-Community in Deutschland für das größte Robotik- und KI-Event Europas in 2027 willkommen zu heißen.“
Prof. Dr. Angela Schoellig, TU München, Koordinatorin des Robotics Instituts Germany: „RoboCup und das Robotics Institute Germany teilen eine inspirierende Vision: Gemeinsam treiben wir bahnbrechende Innovationen in Robotik und Künstlicher Intelligenz voran – für eine nachhaltige Zukunft in Deutschland und weltweit. Mit der RoboCup-Weltmeisterschaft 2027 holen wir die klügsten jungen Köpfe aus aller Welt nach Deutschland. Wir sind begeistert, dieses einzigartige Event als Robotics Institute Germany mitzugestalten und zu unterstützen!“
David Reger, CEO und Gründer NEURA Robotics: „Wir entwickeln kognitive Roboter, die sehen, hören, fühlen und ganz natürlich mit Menschen und ihrer Umgebung interagieren. Beim Besuch der RoboCup German Open 2025 hat mich beeindruckt, wie Menschen verschiedener Generationen gemeinsam Roboter intelligente Aufgaben lösen lassen. Als größte Volkswirtschaft Europas ist Deutschland führend in den Bereichen Robotik und Automatisierung – mit einer starken Forschungsbasis. Damit ist hier der richtige Ort, um den RoboCup 2027 auszurichten.“
Über den RoboCup und das deutsche RoboCup-Komitee Der 1997 gegründete RoboCup ist mit Teams aus mehr als 50 Nationen der weltweit älteste und größte Wettbewerb für intelligente Robotersysteme. Ziel ist es, technologische Entwicklungen in Robotik und KI durch reale Anwendungsszenarien voranzutreiben. Die Teilnehmenden entwickeln intelligente kollaborative robotische Systeme, die komplexe Aufgaben eigenständig bewältigen – unter Wettbewerbsbedingungen, die Innovation, Kreativität und Teamarbeit fordern.
Deutsche Wissenschaftlerinnen und Wissenschaftler haben die Entwicklung des RoboCups wesentlich mitgeprägt. Die deutschen Teams sind im RoboCup-Komitee Deutschland organisiert und haben die Bewerbung mit großem Engagement unterstützt und werden auch bei der Ausrichtung der Weltmeisterschaft eine tragende Rolle spielen. Sämtliche Mitglieder übernehmen zentrale Aufgaben in der Organisation und bringen ihre Expertise aktiv ein. Die Vorfreude ist spürbar – nicht nur das deutsche RoboCup-Komitee, sondern der gesamte RoboCup Deutschland blickt mit großer Erwartung darauf, die internationale RoboCup-Gemeinschaft 2027 wieder in Deutschland begrüßen zu dürfen.
The Avishkaar ABot Advanced Kit is a comprehensive DIY kit for STEM robotics and coding designed specifically for children aged 8 and up. It contains over 60 parts, including metal parts, motors, sensors, wheels, USB cables, screws, nuts, an Allen wrench, and a wrench. With these parts, children can build 10 different robots, from simple vehicles to more complex constructions The set reminded me of the mBot when I set it up, as it was also based on a sturdy metal construction. The included stickers and the tool are nice. The instructions were easy to understand and I didn’t find any errors or had any problems assembling. The app for remote control and programming must be activated with the product code and the user must be registered before using it for the first time. When deploying, e.g. in the classroom, you should have done this in advance. By the way, the 9V block battery visible in the video is not included when purchased from a dealer, but a full-fledged battery pack. I only use the 9V battery because of delivery problems. Overall, however, it is interesting that the robot makes this possible at all. I’m playing with the idea of connecting a solar cell here and operating the robot with solar energy…like a real Mars rover…
Here is more detailed information:
Easy to build programmable robots: With this kit, kids can create 10 different robots with over 60 pieces. This includes metal parts, an easily programmable brain, motors, sensors (2x light sensor, 1x touch sensor/button), wheels, USB cables, screws, nuts, an Allen key, a wrench, cables, and instructions.
Control via mobile app: The robots can be controlled via a remote control app. They can also be programmed using a visual block-based programming environment (similar to Scratch/Blockly).
Learning Objectives: With the ABot Advanced Kit, children learn robotics, programming, construction, mechanical design and problem solving.
Compatibility: The mobile app is compatible with iOS 11 or later and Android 10 or later.
Inexpensive Kit: The ABot Advanced Kit offers a sturdy metal frame to which motors and sensors can be attached. For the equivalent of about 60€, the set offers good value for money. Maybe the set will soon be available at a German retailer.
You can find a comprehensive assembly video of one of the 10 robot models here:
Die igus Steuerungssoftware für herstellerunabhängige Robotik wächst – Lebai, Hitbot und Lynx Motion jetzt verfügbar
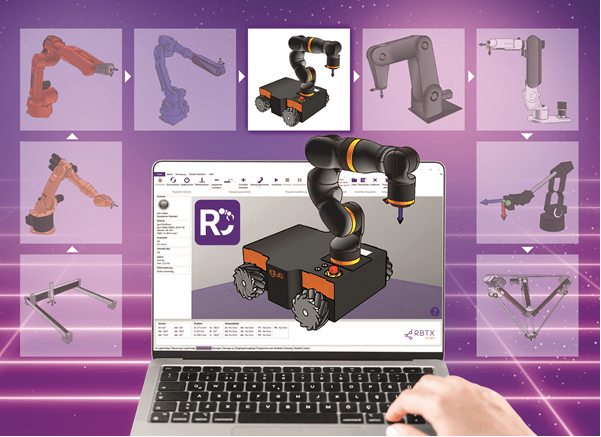
Köln, 3. Juni 2025 – Automatisierung muss nicht kompliziert sein – mit RobotCtrl wird sie für Unternehmen jeder Größe noch zugänglicher. Durch die intuitive Steuerungssoftware von igus lassen sich auf dem Online-Robotik-Marktplatz RBTX erhältliche Roboter unabhängig vom Hersteller einheitlich bedienen und Zubehör wie Kameras, Greifer oder Roboterzellen integrieren. Damit reduziert RobotCtrl die Bedienungskomplexität und den Integrationsaufwand für Einsteiger und Profis erheblich. Neu hinzugekommen ist die Unterstützung der Robotikhersteller Lebai, Hitbot und Lynx Motion.
Als führender Marktplatz für Robotik und Automatisierung vereint RBTX über 175 Anbieter und mehr als 850 Roboter und Komponenten an einem Ort. Ob Greifer, Sensoren oder komplette Robotersysteme – hier finden Interessierte alles, was sie für ihre Automatisierung benötigen. Mit der von igus entwickelten RobotCtrl wird die Integration und Steuerung von Low-Cost-Automatisierung noch flexibler und einfacher als je zuvor. Auf RBTX erhältliche Roboter können mit der Software einheitlich programmiert und gesteuert werden. Nutzer profitieren von einer verringerten Einarbeitungszeit, da sie nur eine einzige Software beherrschen müssen. Die Möglichkeit, Roboter verschiedenster Hersteller mit nur einer Steuerung zu programmieren, spart allerdings nicht nur Zeit und Schulungskosten, sondern eröffnet Unternehmen auch neue Möglichkeiten für eine herstellerunabhängige Automatisierungsstrategie. Dank des modularen Aufbaus unterstützt RobotCtrl verschiedene Roboterkinematiken unterschiedlicher Hersteller, darunter igus, Fanuc, KUKA und viele mehr. Dies ermöglicht eine nahtlose Integration verschiedener Robotiksysteme in bestehende Produktions- und Automatisierungslösungen. Die Bewegungsabläufe der Roboter können auf einer 3D-Oberfläche simuliert werden – ohne dass der Roboter physisch angeschlossen sein muss. „Dies erleichtert die Planung und Entwicklung neuer Prozesse und ermöglicht es Automatisierungsstrategien effizient zu testen bevor sie in die Praxis umgesetzt werden“, macht Alexander Mühlens, Leiter Geschäftsbereich Low-Cost-Automation bei igus, deutlich. „Unternehmen können somit schneller auf Marktanforderungen reagieren, Produktionsprozesse effizienter gestalten und so Kosten sparen.“
Roboter-Programmierung leicht gemacht RobotCtrl wurde bereits erfolgreich mit führenden Herstellern getestet. Nutzer können somit sicher sein, dass sie mit einer bewährten und zuverlässigen Software arbeiten. Ein weiterer Vorteil von RobotCtrl ist die benutzerfreundliche grafische Oberfläche, die eine intuitive Programmierung erlaubt. Dank einer Drag-and-Drop-Funktion können Bewegungsabläufe einfach erstellt und angepasst werden. Dies reduziert den Programmieraufwand und macht die Software auch für Anwender ohne tiefgehende Programmierkenntnisse leicht verständlich. Besonders für kleine und mittelständische Unternehmen, die bisher vor der Komplexität der Robotik zurückgeschreckt sind, bietet RobotCtrl eine praxisnahe und kosteneffiziente Lösung. „Unser Ziel ist es, Automatisierung so einfach und zugänglich wie möglich zu gestalten“, stellt Alexander Mühlens heraus. „Mit RobotCtrl ermöglichen wir Unternehmen jeder Größe, einen kostengünstigen und flexiblen Einstieg in die Automatisierung.“
Weitere Informationen zu RobotCtrl und mehr als 650 erfolgreich durchgeführte Anwendungsbeispiele finden sich auf der Plattform RBTX: rbtx.com
The HP Robots Otto is a versatile, modular robot designed specifically for educational purposes. It offers students and teachers an exciting opportunity to immerse themselves in the world of robotics, 3D printing, electronics and programming. The robot was developed by HP as part of their robotics initiative and is particularly suitable for use in science, technology, engineering and mathematics (STEM) classes.
Key features of Otto:
Modular design: Otto is a modular robot that allows students to build, program and customize it through extensions. This promotes an understanding of technology and creativity. The modular structure allows various components such as motors, sensors and LEDs to be added or replaced, which increases the learning curve for students.
Programmability: The robot can be programmed with various programming languages, including block-based programming for beginners and Python and C++ for advanced programmers. This diversity allows students to continuously improve their coding skills and adapt to the complexity of the tasks.
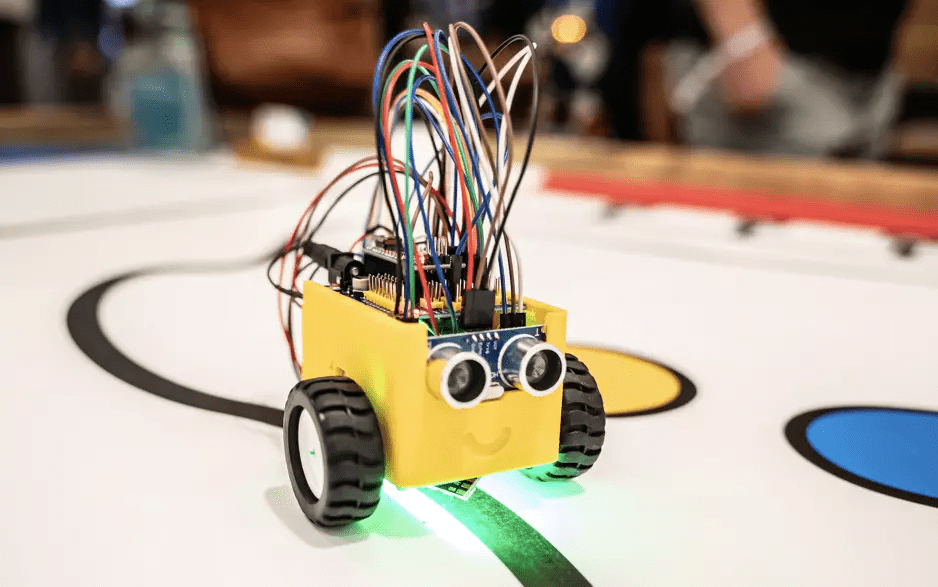
Sensors and functions: Equipped with ultrasonic sensors for obstacle detection, line tracking sensors and RGB LEDs, Otto offers numerous interactive possibilities. These features allow students to program complex tasks such as navigating courses or tracing lines. The sensors help to detect the environment and react accordingly.
3D printing and customizability: Students can design Otto’s outer parts themselves and produce them with a 3D printer. This allows for further personalization and customization of the robot. This creative freedom not only promotes technical understanding, but also artistic skills. Own parts can be designed and sensors can be attached to desired locations.
Educational approach:
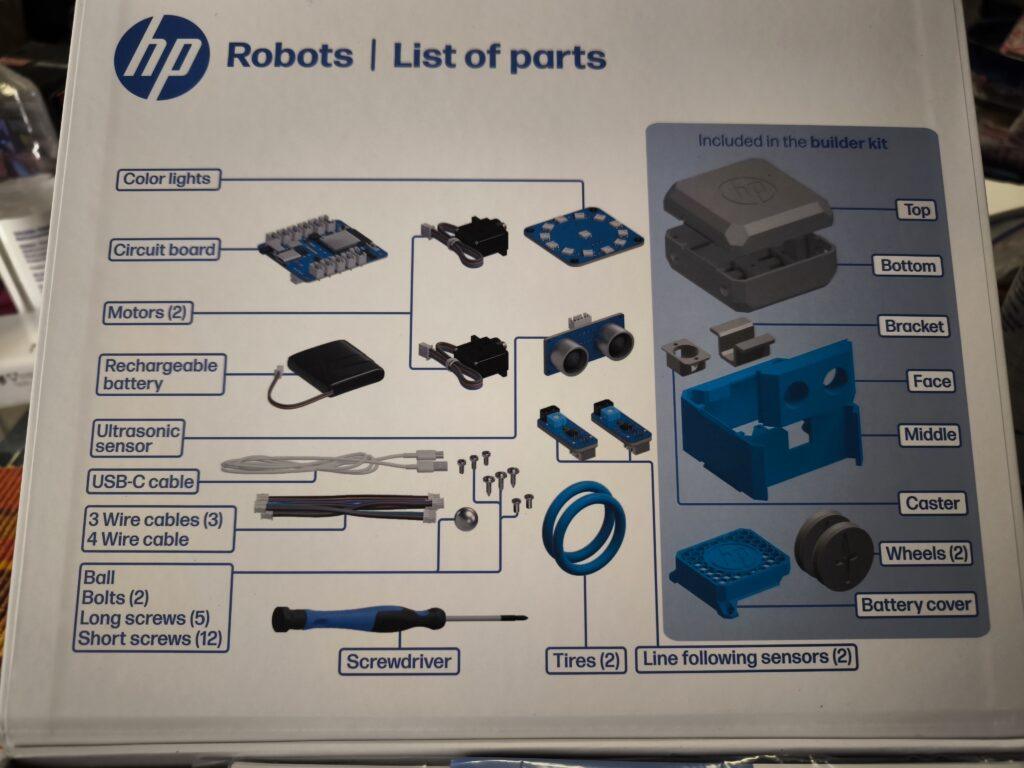
Otto is ideal for use in schools and is aimed at students from the age of 8. Younger students can work under supervision, while older students from the age of 14 can also use and expand the robot independently. The kit contains all the necessary components to build a functioning robot, including motors, sensors, and a rechargeable battery.
Programming environments:
Otto is programmed via a web-based platform that runs on all operating systems. This platform offers different modes:
Block-based programming: Similar to Scratch Jr., ideal for beginners. This visual programming makes it easier to get started in the world of programming and helps students understand basic concepts such as loops and conditions.
Python: A Python editor is available for advanced users. Python is a popular language that works well for teaching because it is easy to read and write. Students can use Python to develop more complex algorithms and expand their programming skills.
C++: Compatible with the Arduino IDE for users who have deeper programming knowledge. C++ offers a high degree of flexibility and allows students to access the hardware directly, allowing for their own advanced projects.
Expansion Kits:
In addition to the Starter Kit, there are several expansion kits. All expansion kits require the starter kit, as they are built on top of it.
Emote Expansion Kit:
It includes components such as an LED matrix display, OLED display, and an MP3 player that allow the robot to display visual and acoustic responses.
This kit is particularly suitable for creative projects where Otto should act as an interactive companion.
The emote kit allows Otto to show emotions, mirror human interactions, and develop different personalities.
Sense Expansion Kit:
With the Sense Kit, Otto can perceive its surroundings through various sensors.
Included are sensors for temperature, humidity, light and noise as well as an inclination sensor. These enable a wide range of interactions with the environment.
The kit is ideal for projects that focus on environmental detection and data analysis.
Interact Expansion Kit:
The Interact kit expands Otto’s tactile interaction capability through modules such as push buttons, rotary knobs and accelerometers.
It enables precise inputs and reactions, as well as measurement of acceleration.
This kit is great for playful activities and interactive games.
Invent Expansion Kit:
The Invent kit is specifically designed to encourage users‘ creativity. It allows the individual adaptation of Otto’s functionalities and design through 3D printing and additional modules as well as compatible clamping blocks.
Users can design and print new accessories to make the robot unique.
Equip Otto with legs and teach him to walk or make him fit for outdoor use off-road with chains.
Use in the classroom:
Otto comes with extensive resources developed by teachers. These materials help teachers design effective STEM lessons without the need for prior knowledge. The robot can be used both in the classroom and at home. The didactic materials include:
Curricula: Structured lesson plans that help teachers plan and execute lessons.
Project ideas and worksheets: A variety of projects that encourage students to think creatively and expand their skills.
Tutorials and videos: Additional learning materials to help students better understand complex concepts.
Conclusion:
The HP Robots Otto is an excellent tool for fostering technical understanding and creativity in students. Thanks to its modular design and diverse programming options, it offers a hands-on learning experience in the field of robotics and electronics. Ideal for use in schools, Otto provides teachers with a comprehensive platform to accompany students on an exciting journey into the world of technology. In particular, Otto’s versatility through the 3D-printed parts and expansion packs offers the opportunity to build the personal learning robot.
Hannover, 25. März 2025 ‒ Was in einer kalifornischen Garage begann, prägt heute die globale Innovationslandschaft: 2025 feiert das US-Make-Magazin sein 20-jähriges Bestehen und gleichzeitig die Maker-Bewegung als bedeutenden Treiber der digitalen Transformation. Die deutsche Maker Faire in Hannover ist nach San Francisco und Rom zur drittgrößten weltweit gewachsen und lockte in über 10 Jahren mehr als 140.000 Besucher an.
„Die Maker-Bewegung existierte schon immer, aber erst das Make Magazin gab ihr 2005 einen Namen und eine Identität”, erklärt Dale Dougherty, Gründer des US-Make-Magazins. Was als Zeitschrift begann, entwickelte sich schnell zu einem globalen Phänomen: Seit der ersten Maker Faire 2006 fanden weltweit 1.497 Events mit über 131.000 ausstellenden Makern und mehr als 7,6 Millionen Teilnehmern statt.
Die deutsche Erfolgsgeschichte begann 2011 mit „c’t Hardware Hacks”, dem Vorläufer des heutigen Make-Magazins . „Die Maker-Bewegung hat eine neue Form der Produktionsorganisation etabliert, die auf Internet und Peer-Netzwerken basiert. Durch den offenen Zugang zu digitalen Fertigungstechnologien ist eine moderne, demokratische Innovationskultur entstanden”, erklärt Daniel Bachfeld, Chefredakteur des deutschen Make-Magazins. „Jeder kann heute mit 3D-Druckern, Laser-Cuttern und Open-Source-Elektronik eigene Produkte entwickeln und herstellen.“
In FabLabs und Makerspaces entstehen neue Produktionsinfrastrukturen, die intelligente Robotik mit kollaborativen Arbeitsweisen verbinden. Der „Do-It-With-Others”-Ansatz führt zu einer dezentralen, lokalen Fertigung. Dabei entwickeln sich flexible Wertschöpfungsketten, die durch moderne Software gesteuert werden.
r2_builders_club Bild: MakerMedia
Die Bewegung prägt auch die Bildungslandschaft: „Making verbindet digitale und handwerkliche Fähigkeiten und fördert kreative Problemlösung”, sagt Bachfeld. Immer mehr Schulen und Universitäten integrieren Maker-Projekte in ihre Lehrpläne oder eröffnen genau wie viele Bibliotheken eigene Makerspaces.
Auch im Make-Magazin wird der Bildungsansatz forciert: In Kooperation mit dem Schweizer Hersteller Oxon entstand beispielsweise das Make Innovators Kit mit Playbook. Gemeinsam mit dem Umweltcampus der Hochschule Trier wurde das Makey:Lab entwickelt, das Schülern ab 14 Jahren den Einstieg in digitale Umweltforschung und Programmierung ermöglicht.
Die Maker Faire Hannover hat sich seit 2013 als inspirierender Ideenpool etabliert. „Der Mix aus Wissenschaftsmesse und buntem DIY-Festival bringt Menschen jeden Alters und Hintergrunds zusammen, um die vielseitigen Kreationen zu präsentieren oder zu bestaunen – von selbstgebauten Robotern bis zu kinetischen Skulpturen”, unterstreicht Daniel Rohlfing, Leiter Events & Sales Maker Faire Deutschland. “Auch die MINT-Bildung kommt nicht zu kurz. Kinder und Jugendliche werden auf der Maker Faire für die digitale Welt, IT, KI und Technik nachhaltig begeistert”.
Iron Horse (Highlight)Bild: Maker Media
Seit vielen Jahren übernimmt das Bundesbildungsministerium die Schirmherrschaft für die Maker Faire, für Rohlfing ein großes Zeichen der Wertschätzung. Die nächste Maker Faire Hannover findet am 23. und 24. August 2025 im Hannover Congress Centrum statt, der Call for Makers ist noch bis Ende Mai geöffnet, auch Unternehmen können sich für eine Teilnahme anmelden.
Linien-RoboterBild: Maker Media
Im DACH-Raum wächst die Bewegung ebenfalls: Die Maker Faire Ruhr lädt für den 29. und 30. März in die DASA Arbeitswelt Ausstellung nach Dortmund ein. In der Schweiz öffnet die Maker Faire Solothurn am 28. und 29. Juni 2025 ihre Tore in der Enter Technikwelt.
MONTREAL, 4. Februar 2025 /PRNewswire/ — Vention, Anbieter der weltweit einzigen durchgängigen Automatisierungsplattform für Software und Hardware, hat seinen beliebten Online-Marketplace um ein erweitertes Sortiment und ein optimiertes Nutzererlebnis ergänzt. Damit wird es für Unternehmen noch einfacher, Plug-and-Play-Automatisierungskomponenten zu finden und zu integrieren.
Die im Vention Marketplace verfügbaren Produkte werden entweder von Vention selbst entwickelt und produziert oder sorgfältig kuratiert und für nahtlose Kompatibilität zertifiziert. Die Anzahl der Partner mit kompatiblen Komponenten hat sich jüngst verdoppelt – mehr als 200 zertifizierte Produkte von Partnerunternehmen sind nun verfügbar.
Seit der Einführung im Jahr 2019 umfasst der Vention Marketplace mittlerweile 25 Produktkategorien. Neue Funktionen wie verbesserte Vergleichstools, optimierte Navigation sowie transparente Preise und Lieferzeiten machen den Einkaufsprozess noch einfacher. Eine vollständige Liste der Vention Marketplace-Partner ist unterVention.io/marketplace verfügbar.
„Der Vention Marketplace gehört bereits zu den führenden Online-Stores für Automatisierungslösungen – und jetzt wird er noch besser. Durch die Erweiterung unseres Partnernetzwerks erleichtern wir es Unternehmen, kompatible Automatisierungskomponenten schneller und effizienter zu finden, zu kaufen und zu integrieren“, sagt Etienne Lacroix, Gründer und CEO von Vention.
Alle im Marketplace erhältlichen Produkte sind auch in der kostenlosen Drag-and-Drop-Software MachineBuilder™ von Vention verfügbar. Dort können Anwender einen digitalen Zwilling ihrer Lösung entwerfen, Funktionen programmieren und testen sowie das komplette System mit wenigen Klicks bestellen und in Betrieb nehmen. Im Jahr 2024 wurden über 63.000 Designs von Nutzern erstellt.
Kompatible Automatisierungskomponenten jetzt noch einfacher finden
Der Kauf von Automatisierungskomponenten kann für Produktionsbetriebe und Einkaufsabteilungen eine Herausforderung sein – vor allem, wenn es um die Kompatibilität und Integration in bestehende Fertigungssysteme geht.
Der Vention Marketplace wurde entwickelt, um diese Integrationshürden zu beseitigen. Mit seinem Plug-and-Play-Ökosystem ermöglicht er eine schnelle und reibungslose Umsetzung von Automatisierungsprojekten. Vention erweitert kontinuierlich sein Partnernetzwerk und zertifiziert neue Komponenten für eine nahtlose Kompatibilität mit seinem immer beliebter werdenden Hardware-Ökosystem.
Die neue Kampagne zum Vention Marketplace – „Hier ist alles kompatibel.“ – hebt die einfache Anwendung für Ingenieure, Einkäufer und Produktionsverantwortliche hervor.
Mit über 5 Millionen verkauften Komponenten bietet der Vention Marketplace jetzt mehr als 2.200 vollständig kompatible Plug-and-Play-Bauteile – direkt von Vention oder von 40 zertifizierten Partnern.
Nutzer können aus 33 Robotern von sechs Marken, über 100 Greifern und End-of-Arm-Tools, mehr als 200 Struktur-, Befestigungs- und Montagekomponenten, über 70 Steuerungen, Motoren und Aktuatoren, mehr als 50 Fördertechnik- und Materialtransportlösungen sowie über 25 Sicherheitskomponenten und vielem mehr wählen.
Zertifizierte Partnerkomponenten für nahtlose Kompatibilität stammen unter anderem von ABB, FANUC, Keyence, OnRobot, Schunk, Universal Robots und der Zimmer Group.
Vention bietet die weltweit einzige durchgängige Software- und Hardware-Plattform für das Entwerfen, Automatisieren, Inbetriebnehmen und Betreiben von Automatisierungssystemen – mit perfekter Kompatibilität.
95 % der Bestellungen über den Vention Marketplace werden innerhalb von zwei Wochen versandt.
Neue Produkt-Updates für den Marketplace werden vom 4. bis 6. Februar auf der Automatisierungsmesse ATX West in Anaheim, Kalifornien, präsentiert – zusammen mit der Software MachineBuilder™ und den Automatisierungssystemen von Vention.