Ein Roboter hebt den Ball, richtet seinen Körper aus, berechnet Winkel und Kraft — und wirft. Der Ball fliegt in einem hohen Bogen Richtung Korb. Was vor einigen Jahren noch nach Science-Fiction klang, ist heute echte Robotik: Humanoide Roboter lernen Basketball.
Besonders bekannt ist der Basketball-Roboter CUE von Toyota. Das Projekt begann 2017 als freiwillige Idee von Toyota-Mitarbeitenden. Schon 2019 gelang CUE ein Guinness-Weltrekord mit 2.020 Freiwürfen in Folge. 2024 traf CUE6 aus 24,55 Metern Entfernung — der weiteste Basketballwurf eines humanoiden Roboters.
Vom starren Werfer zum Basketball-Roboter
Am Anfang konnten solche Roboter vor allem eines: stehen, zielen und werfen. Das war bereits schwer genug, denn ein Basketballwurf ist eine komplexe Mischung aus Wahrnehmung, Berechnung und Bewegung.
Heute geht die Entwicklung weiter. Mit CUE7 zeigte Toyota 2026 eine neue Generation des Roboters, die nicht nur werfen, sondern auch dribbeln und sich über das Spielfeld bewegen kann. Damit nähert sich der Roboter langsam dem an, was menschliche Basketballspieler tun: sehen, reagieren, laufen, passen und werfen.
Warum Basketball für Roboter so schwer ist
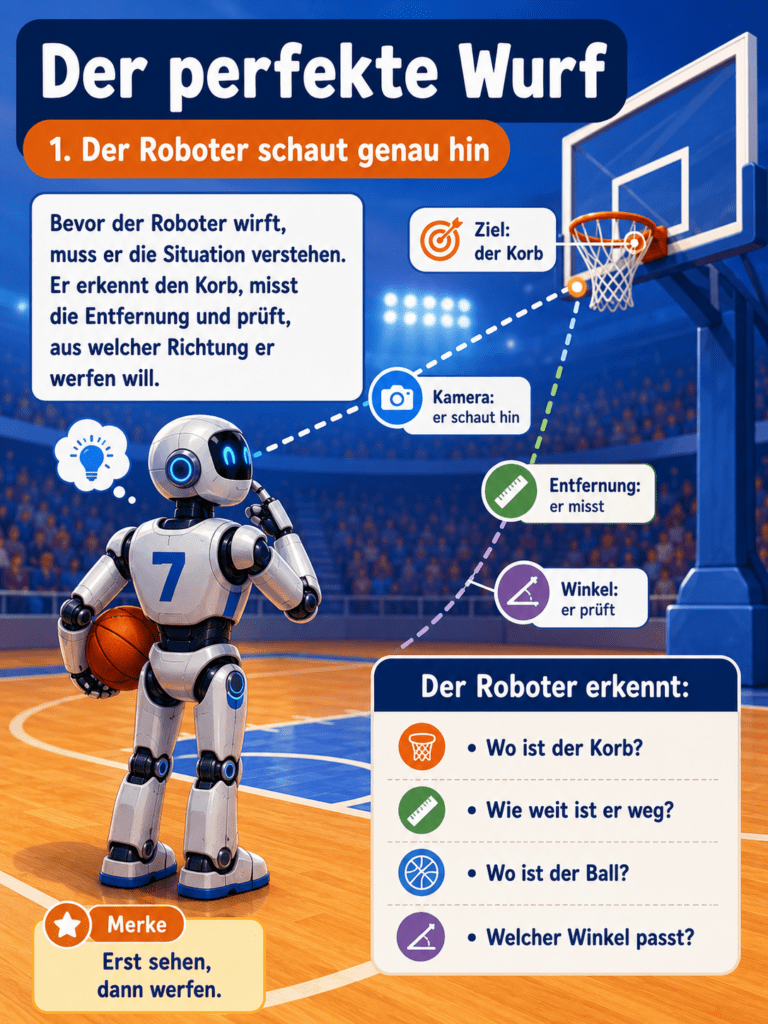
Für Menschen wirkt ein Wurf fast selbstverständlich. Man schaut zum Korb, beugt die Knie, streckt den Arm und lässt den Ball los. Für einen Roboter ist das eine Kette aus vielen Einzelschritten.
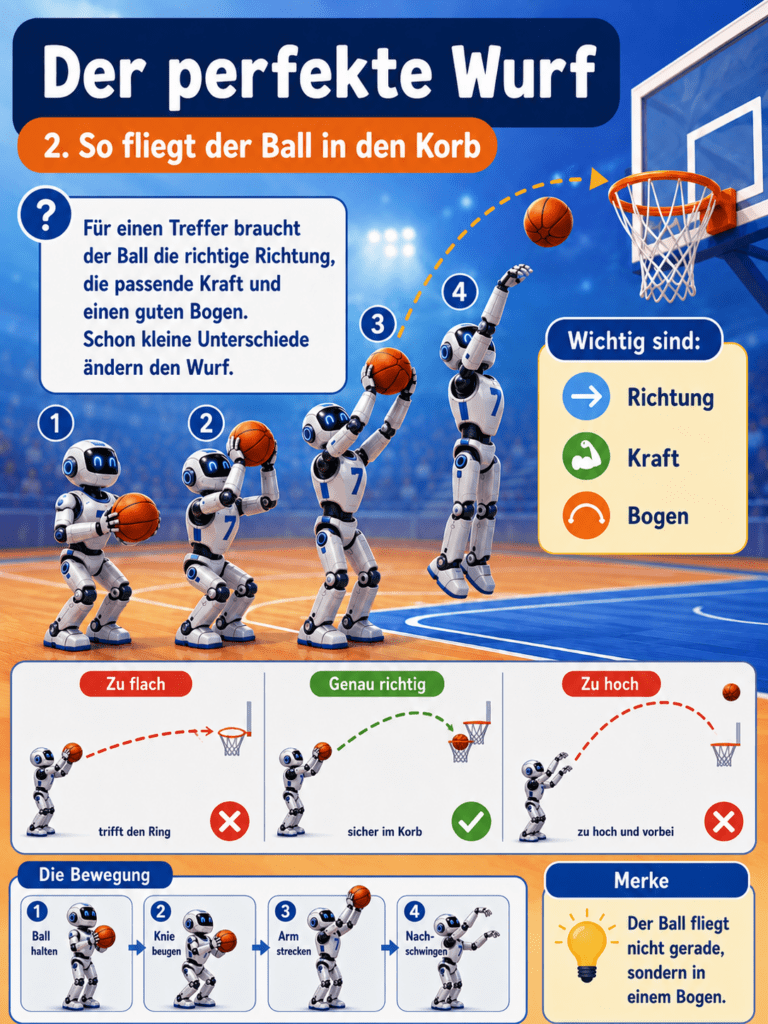
Er muss erkennen, wo der Korb steht. Er muss Entfernung und Höhe berechnen. Dann muss er entscheiden, mit welcher Kraft, welchem Winkel und welcher Rotation der Ball geworfen werden soll. Gleichzeitig müssen Schulter, Ellbogen, Handgelenk und Finger präzise zusammenarbeiten.
Dafür nutzen moderne Roboter Kameras, Sensoren, Motoren und Künstliche Intelligenz. Die KI hilft, aus jedem Wurf zu lernen: War der Ball zu kurz? War der Winkel zu flach? War die Kraft zu groß? Beim nächsten Versuch kann der Roboter seine Bewegung anpassen.
Die Theorie vom perfekten Wurf
Hier wird es besonders spannend, denn Basketball ist nicht nur Sport, sondern auch Physik. Der Ball fliegt auf einer Parabel, also einer bogenförmigen Bahn. Entscheidend sind vor allem der Abwurfwinkel, die Abwurfgeschwindigkeit, die Abwurfhöhe, die Rotation des Balls und der Eintrittswinkel in den Korb.
Der deutsche Basketballtrainer Holger Geschwindner beschäftigte sich intensiv mit dieser Idee. Er war nicht nur Basketballer, sondern auch mathematisch und physikalisch geprägt. Gemeinsam mit Dirk Nowitzki arbeitete er an einem Wurf, der möglichst stabil und wiederholbar ist.
Wichtig ist: Es gibt nicht für jeden Spieler exakt denselben perfekten Winkel. Ein guter Richtwert liegt oft bei etwa 47 Grad. Je nach Körpergröße, Abwurfhöhe und Distanz kann der optimale Abwurfwinkel aber höher liegen — beim Freiwurf werden in Studien häufig Werte um 50 bis 52 Grad genannt.
Warum Größe und Abwurfhöhe wichtig sind
Ein großer Spieler wie Dirk Nowitzki lässt den Ball weiter oben los als ein kleinerer Spieler. Dadurch verändert sich die optimale Flugbahn. Der Ball muss nicht ganz so steil steigen, um trotzdem sauber in den Korb zu fallen.
Deshalb ist der perfekte Wurf keine einzige magische Zahl. Entscheidend ist eine Bewegung, die kleine Fehler verzeiht. Wenn der Ball ein wenig zu stark, zu schwach oder leicht seitlich geworfen wird, soll er trotzdem noch eine gute Chance haben, in den Korb zu fallen.
Genau das ist die Kernidee: Der perfekte Wurf ist nicht einfach der schönste Wurf, sondern ein fehlertoleranter Wurf.
Holger Geschwindner und Dirk Nowitzki
Holger Geschwindner entwickelte mit Dirk Nowitzki eine besondere Art zu trainieren. Es ging nicht nur um Wiederholung, sondern auch um Verständnis: Wie bewegt sich der Ball? Wie arbeitet der Körper? Wie entsteht ein stabiler, weicher Wurf?
Dirk Nowitzkis berühmter Wurf war deshalb eine Verbindung aus Technik, Physik, Rhythmus und jahrelangem Training. Der SWR-Beitrag „Dirk Nowitzki – Der perfekte Wurf im Basketball“ zeigt genau diese Verbindung zwischen Nowitzki, Geschwindner und der Idee eines physikalisch durchdachten Wurfs.
NBA-Wurfquoten im Vergleich mit Dirk Nowitzki
| Saison | NBA Feldwurfquote | NBA Dreierquote | NBA eFG% | Dirk Nowitzki Vergleich |
| 2005/06 | 45,4 % | 35,8 % | 49,0 % | Dirk: 48,0 % FG, 40,6 % 3P, 90,1 % FT — eine seiner stärksten Wurfsaisons. |
| 2009/10 | ca. 46,1 % | ca. 35,5 % | ca. 50,1 % | Dirk lag auch hier klar über dem Ligaschnitt: 48,1 % FG und sehr starke Freiwurfquote. |
| 2014/15 | 44,9 % | 35,0 % | ca. 49,6 % | Dirk war schon 36 Jahre alt, blieb aber als Stretch-Big weiter ein gefährlicher Werfer. |
| 2019/20 | 46,0 % | 35,8 % | 52,9 % | Dirk war bereits zurückgetreten. |
| 2024/25 | 46,7 % | 36,0 % | 54,5 % | Moderne NBA: höhere eFG%, weil viel mehr Dreier geworfen werden. Dirk war ein früher Wegbereiter dieses Trends. |
Dirk Nowitzkis Karrierewerte liegen bei 47,1 % Feldwurfquote, 38,0 % Dreierquote, 87,9 % Freiwurfquote und 51,2 % effektiver Feldwurfquote. Damit war er für einen 2,13-Meter-Spieler außergewöhnlich effizient — besonders, weil viele seiner Würfe aus der Mitteldistanz, aus dem Fadeaway oder von der Dreierlinie kamen. https://www.basketball-reference.com/players/n/nowitdi01.html
Was Roboter von Nowitzki lernen können
Roboter sind stark im Rechnen. Sie können Winkel, Kraft und Flugbahn in Sekundenbruchteilen bestimmen. Aber Basketball ist mehr als eine Formel. Ein echter Wurf entsteht aus Bewegung, Timing und Anpassung.
Ein Roboter wie CUE kann unter kontrollierten Bedingungen extrem präzise sein. Doch ein Basketballspiel ist chaotisch: Spieler bewegen sich, der Ball springt, Gegner stören, der Körper ist nicht immer perfekt ausgerichtet. Genau dort liegt die nächste große Herausforderung.
Die Roboter der Zukunft müssen nicht nur werfen können. Sie müssen Spielsituationen verstehen, Entscheidungen treffen und ihren Körper flexibel einsetzen.
Fazit
Humanoide Basketball-Roboter zeigen eindrucksvoll, wie weit Robotik und KI bereits gekommen sind. Sie können Körbe treffen, Rekorde aufstellen und immer menschlichere Bewegungen ausführen.
Trotzdem bleibt der perfekte Basketballwurf etwas Besonderes. Bei Menschen verbindet er Physik, Training, Körpergefühl und Kreativität. Bei Robotern zeigt er, wie Maschinen lernen, komplexe Bewegungen zu kontrollieren.
Vielleicht spielt eines Tages ein humanoider Roboter in einem echten Basketballspiel mit. Bis dahin zeigt uns die Technik vor allem eines: Der perfekte Wurf ist nicht nur Sport — er ist angewandte Physik.
FuxFun
Wusstest du, dass Toyotas Basketball-Roboter CUE nicht als großes Firmenprojekt begann, sondern 2017 als freiwillige Idee von Mitarbeitenden? Aus einem Experiment wurde ein Guinness-Weltrekord-Roboter.
Für Profis
Spannend ist der Unterschied zwischen Abwurfwinkel und Eintrittswinkel. Der Abwurfwinkel beschreibt, in welchem Winkel der Ball die Hand verlässt. Der Eintrittswinkel beschreibt, wie steil der Ball am Korb ankommt. Für erfolgreiche Würfe ist nicht nur der Start wichtig, sondern auch, wie der Ball am Ring eintrifft. Studien betonen außerdem, dass der optimale Wurf individuell ist und von Körpergröße, Abwurfhöhe, Entfernung und Konstanz abhängt.
Quellen
Toyota Global: Entwicklung und Guinness-Rekord von CUE.
Guinness World Records: Farthest basketball shot by a humanoid robot.
Toyota Times: Vorstellung von CUE7.
SWR Sport: „Dirk Nowitzki – Der perfekte Wurf im Basketball“.
Studien zur Physik und Biomechanik des Basketballwurfs.
Buchempfehlung
Humanoide Basketball-Roboter zeigen, wie faszinierend die Verbindung aus Technik, Bewegung und Künstlicher Intelligenz ist. Mehr über diese Themen erfährst du in meinem Buch „Roboter & KI“ aus der SchlauFUX-Reihe vom Kosmos Verlag.
Dort geht es darum, wie Roboter sehen, lernen, entscheiden und handeln — und wie KI unsere Zukunft verändert. Verständlich erklärt, spannend erzählt und mit vielen Mitmach-Ideen.
Zum Buch:
https://amzn.to/4gYZXT7