Sphero hat sich seit dem ersten Modell von 2011 deutlich weiterentwickelt. Was als ferngesteuerter Ball begann, ist heute – besonders für Robotik- und Bildungs-Enthusiasten – eine feste Größe im Bereich der programmierbaren Lernroboter geworden. Von der einfachen 1.0-Version über den transparenten SPRK bis hin zum aktuellen BOLT+ hat Sphero schrittweise die Motorik, Sensorik und Programmiermöglichkeiten (Draw, Block, JavaScript + Python) ausgebaut.
Die nachfolgende Übersicht vergleicht die wichtigsten Modelle in ihrer Entwicklung.
Sphero 1.0 & 2.0 – Die Ursprünge des Roboterballs
Der Sphero 1.0 war der erste App-gesteuerte, undurchsichtige Roboterball, der das grundlegende Prinzip einführte: Steuerung per Bluetooth, induktives Laden und Gyroskop sowie Beschleunigungssensor für die Orientierung. Der Sphero 2.0 brachte dann ein massives Hardware-Upgrade: Er war doppelt so schnell (bis zu 2,13 m/s), durch mehr LEDs dreimal so hell und besaß einen tieferen Schwerpunkt, was die Steuerung deutlich präziser machte. Er etablierte Sphero als agiles Spielzeug und bereitete den Weg für bildungsorientierte Modelle.
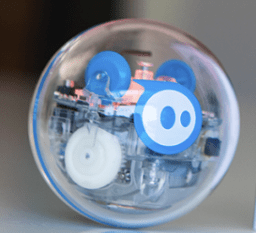
Sphero SPRK und SPRK+ – Der Fokus auf Bildung
Mit der SPRK-Serie machte Sphero den Schritt in Richtung MINT-Ausbildung. Das markanteste Merkmal ist die transparente Hülle, durch die man die Elektronik, Motoren und Mechanik im Inneren arbeiten sieht. Der SPRK+ (Tennisballgröße, ca. 181 g) ergänzte dieses Konzept durch eine wasserdichte und kratzfeste Polycarbonat-Hülle sowie Bluetooth LE (bis 30 m Reichweite). Die Sensorik blieb bei Motor-Encoder, Gyroskop und Beschleunigungssensor, was für grundlegende Physik- und Programmieraufgaben vollkommen ausreicht.
Sphero Mini – Der günstige Einstieg
Der Sphero Mini ist deutlich kleiner (Tischtennisballgröße, 46 g) und günstiger als seine großen Geschwister. Er ist nicht wasserdicht, und seine farbige Hülle muss zum Laden (via Micro-USB statt Induktion) geöffnet werden. Die Geschwindigkeit ist auf 1 m/s begrenzt und die Bluetooth-Reichweite auf 10 m. Dennoch ist er vollständig programmierbar und ideal für den Einstieg – oder als kostengünstige Anschaffung in mehrfacher Ausführung (z.B. für kleine Wettbewerbe auf dem Schreibtisch).
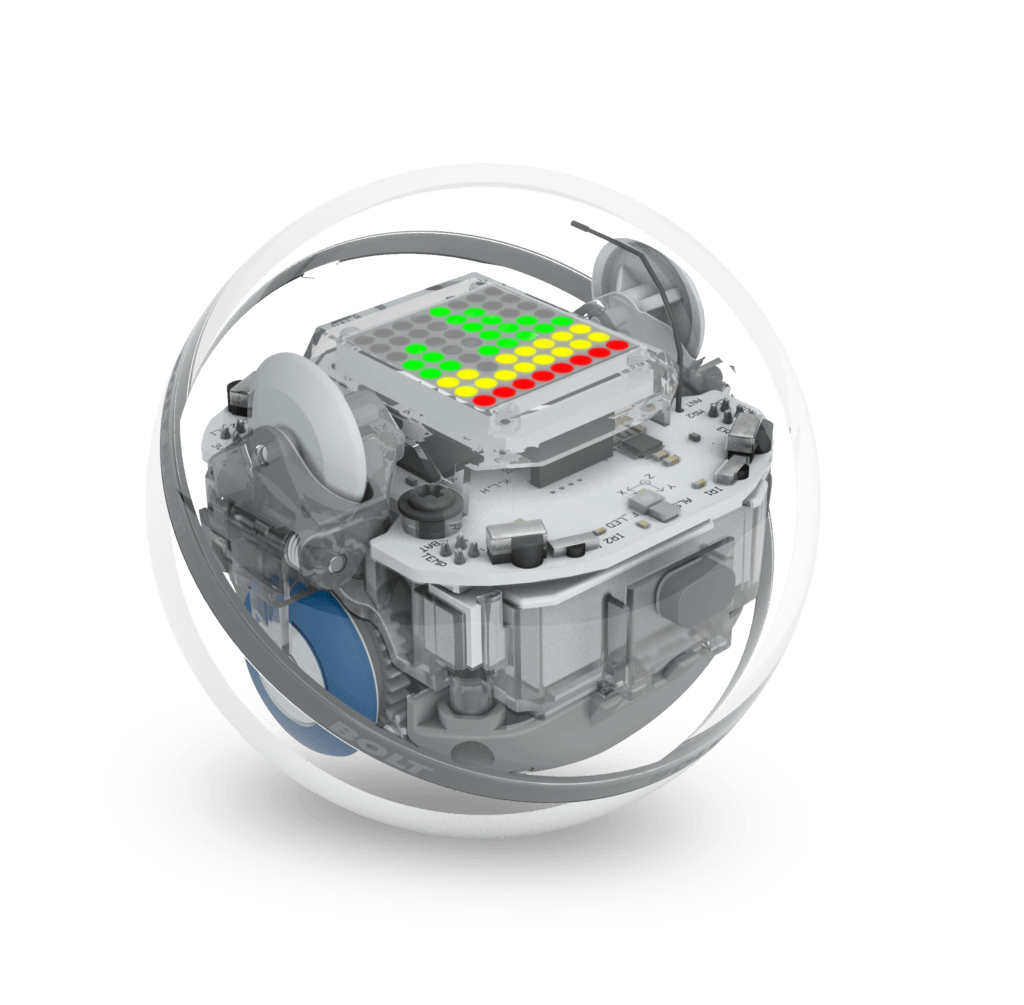
Sphero BOLT – Das Profimodell mit Sensoren
Der Sphero BOLT nahm die transparente Hülle des SPRK+ und rüstete sie massiv auf: Das Herzstück ist eine programmierbare 8×8 LED-Matrix im Inneren. Hinzu kamen neue Sensoren, die besonders für fortgeschrittene Robotik-Projekte spannend sind:
Lichtsensor: Erlaubt Reaktionen auf Helligkeit.
Kompass (Magnetometer): Ermöglicht die Ausrichtung ohne manuelles Kalibrieren („Auto Aim“).
Infrarot-Sensoren: Erlauben die direkte Kommunikation (Schwarmverhalten) zwischen mehreren BOLT-Robotern. Der BOLT ist ebenfalls wasserdicht, lädt induktiv und bietet eine Laufzeit von über 2 Stunden.
Sphero BOLT+ – Das Upgrade mit Display
Der BOLT+ ist die neueste Iteration und ersetzt die LED-Matrix des BOLT durch ein hochauflösendes 128×128 Pixel LCD-Display. Dies ermöglicht komplexere Animationen, Grafiken und die Anzeige von Live-Sensordaten direkt auf dem Roboter. Angetrieben von einem Dual-Core-SoC-Prozessor und ausgestattet mit „Shake-to-Wake“ (Aufwecken durch Schütteln) sowie verbessertem Qi-Wireless-Laden, bietet er neue Programmierblöcke wie „Roll to Distance“. Er baut auf dem Formfaktor des BOLT auf und ist rückwärtskompatibel zu dessen Lerninhalten.
Vergleichstabelle der Sphero Modelle
Feature / Modell
Sphero 2.0
Sphero Mini
SPRK+
Sphero BOLT
Sphero BOLT+
Größe / Gewicht
74 mm / 168 g
42 mm / 46 g (Tischtennisball)
73 mm / 181 g (Tennisball)
73 mm / 200 g (Tennisball)
73 mm / 200 g (Tennisball)
Hülle
Undurchsichtig
Farbig, zu öffnen
Transparent, versiegelt, wasserdicht
Transparent, versiegelt, wasserdicht
Transparent, versiegelt, wasserdicht
Ladung
Induktiv
Micro-USB
Induktiv (proprietär)
Induktiv (proprietär)
Verbessertes Qi-Laden
Display / Licht
RGB-LEDs
RGB-LEDs
RGB-LEDs
8×8 LED-Matrix
128×128 LCD-Display
Max. Speed
2,13 m/s
1 m/s
2 m/s
2 m/s
2 m/s
Akkulaufzeit
~75 Minuten
~45-60 Min.
> 1 Stunde
2+ Stunden
Ganzer Schultag
Verbindung
Bluetooth (klassisch)
Bluetooth LE (10 m)
Bluetooth LE (30 m)
Bluetooth LE (30 m)
Bluetooth LE (30 m)
Sensoren
Gyroskop, Beschleunigung
Encoder, Gyroskop, Beschleunigung
Encoder, Gyroskop, Beschleunigung
Wie SPRK+ plus Infrarot, Kompass, Lichtsensor
Wie BOLT
Besonderheit
Historisches Modell, Meilenstein der Serie
Günstigster Einstieg, Laden per Kabel
Robuste Basis für Bildung, wasserdicht
Schwarm-Kommunikation (IR), Auto-Aim
LCD-Display, Dual-Core-Prozessor, Shake-to-Wake
(Anmerkung: Der Sphero 1.0 wurde in der Tabelle weggelassen, da der 2.0 ihn im identischen Gehäuse direkt abgelöst und deutlich verbessert hat).
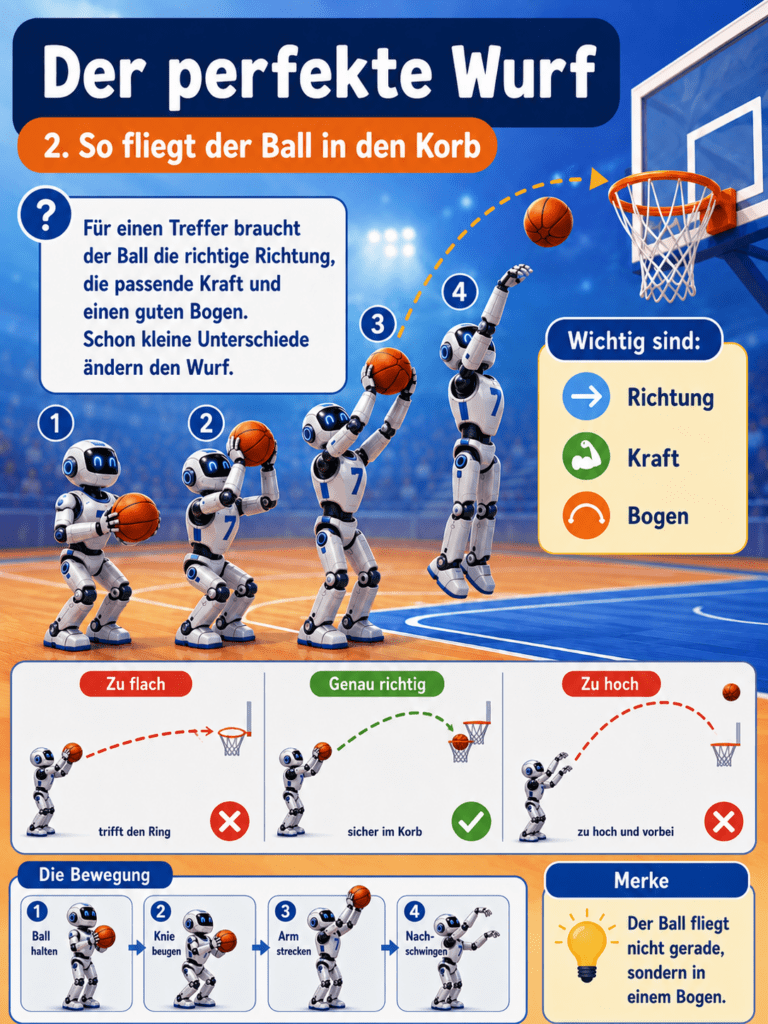
Ein Roboter hebt den Ball, richtet seinen Körper aus, berechnet Winkel und Kraft — und wirft. Der Ball fliegt in einem hohen Bogen Richtung Korb. Was vor einigen Jahren noch nach Science-Fiction klang, ist heute echte Robotik: Humanoide Roboter lernen Basketball.
Besonders bekannt ist der Basketball-Roboter CUE von Toyota. Das Projekt begann 2017 als freiwillige Idee von Toyota-Mitarbeitenden. Schon 2019 gelang CUE ein Guinness-Weltrekord mit 2.020 Freiwürfen in Folge. 2024 traf CUE6 aus 24,55 Metern Entfernung — der weiteste Basketballwurf eines humanoiden Roboters.
Vom starren Werfer zum Basketball-Roboter
Am Anfang konnten solche Roboter vor allem eines: stehen, zielen und werfen. Das war bereits schwer genug, denn ein Basketballwurf ist eine komplexe Mischung aus Wahrnehmung, Berechnung und Bewegung.
Heute geht die Entwicklung weiter. Mit CUE7 zeigte Toyota 2026 eine neue Generation des Roboters, die nicht nur werfen, sondern auch dribbeln und sich über das Spielfeld bewegen kann. Damit nähert sich der Roboter langsam dem an, was menschliche Basketballspieler tun: sehen, reagieren, laufen, passen und werfen.
Warum Basketball für Roboter so schwer ist
Für Menschen wirkt ein Wurf fast selbstverständlich. Man schaut zum Korb, beugt die Knie, streckt den Arm und lässt den Ball los. Für einen Roboter ist das eine Kette aus vielen Einzelschritten.
Er muss erkennen, wo der Korb steht. Er muss Entfernung und Höhe berechnen. Dann muss er entscheiden, mit welcher Kraft, welchem Winkel und welcher Rotation der Ball geworfen werden soll. Gleichzeitig müssen Schulter, Ellbogen, Handgelenk und Finger präzise zusammenarbeiten.
Dafür nutzen moderne Roboter Kameras, Sensoren, Motoren und Künstliche Intelligenz. Die KI hilft, aus jedem Wurf zu lernen: War der Ball zu kurz? War der Winkel zu flach? War die Kraft zu groß? Beim nächsten Versuch kann der Roboter seine Bewegung anpassen.
Die Theorie vom perfekten Wurf
Hier wird es besonders spannend, denn Basketball ist nicht nur Sport, sondern auch Physik. Der Ball fliegt auf einer Parabel, also einer bogenförmigen Bahn. Entscheidend sind vor allem der Abwurfwinkel, die Abwurfgeschwindigkeit, die Abwurfhöhe, die Rotation des Balls und der Eintrittswinkel in den Korb.
Der deutsche Basketballtrainer Holger Geschwindner beschäftigte sich intensiv mit dieser Idee. Er war nicht nur Basketballer, sondern auch mathematisch und physikalisch geprägt. Gemeinsam mit Dirk Nowitzki arbeitete er an einem Wurf, der möglichst stabil und wiederholbar ist.
Wichtig ist: Es gibt nicht für jeden Spieler exakt denselben perfekten Winkel. Ein guter Richtwert liegt oft bei etwa 47 Grad. Je nach Körpergröße, Abwurfhöhe und Distanz kann der optimale Abwurfwinkel aber höher liegen — beim Freiwurf werden in Studien häufig Werte um 50 bis 52 Grad genannt.
Warum Größe und Abwurfhöhe wichtig sind
Ein großer Spieler wie Dirk Nowitzki lässt den Ball weiter oben los als ein kleinerer Spieler. Dadurch verändert sich die optimale Flugbahn. Der Ball muss nicht ganz so steil steigen, um trotzdem sauber in den Korb zu fallen.
Deshalb ist der perfekte Wurf keine einzige magische Zahl. Entscheidend ist eine Bewegung, die kleine Fehler verzeiht. Wenn der Ball ein wenig zu stark, zu schwach oder leicht seitlich geworfen wird, soll er trotzdem noch eine gute Chance haben, in den Korb zu fallen.
Genau das ist die Kernidee: Der perfekte Wurf ist nicht einfach der schönste Wurf, sondern ein fehlertoleranter Wurf.
Holger Geschwindner und Dirk Nowitzki
Holger Geschwindner entwickelte mit Dirk Nowitzki eine besondere Art zu trainieren. Es ging nicht nur um Wiederholung, sondern auch um Verständnis: Wie bewegt sich der Ball? Wie arbeitet der Körper? Wie entsteht ein stabiler, weicher Wurf?
Dirk Nowitzkis berühmter Wurf war deshalb eine Verbindung aus Technik, Physik, Rhythmus und jahrelangem Training. Der SWR-Beitrag „Dirk Nowitzki – Der perfekte Wurf im Basketball“ zeigt genau diese Verbindung zwischen Nowitzki, Geschwindner und der Idee eines physikalisch durchdachten Wurfs.
NBA-Wurfquoten im Vergleich mit Dirk Nowitzki
Saison
NBA Feldwurfquote
NBA Dreierquote
NBA eFG%
Dirk Nowitzki Vergleich
2005/06
45,4 %
35,8 %
49,0 %
Dirk: 48,0 % FG, 40,6 % 3P, 90,1 % FT — eine seiner stärksten Wurfsaisons.
2009/10
ca. 46,1 %
ca. 35,5 %
ca. 50,1 %
Dirk lag auch hier klar über dem Ligaschnitt: 48,1 % FG und sehr starke Freiwurfquote.
2014/15
44,9 %
35,0 %
ca. 49,6 %
Dirk war schon 36 Jahre alt, blieb aber als Stretch-Big weiter ein gefährlicher Werfer.
2019/20
46,0 %
35,8 %
52,9 %
Dirk war bereits zurückgetreten.
2024/25
46,7 %
36,0 %
54,5 %
Moderne NBA: höhere eFG%, weil viel mehr Dreier geworfen werden. Dirk war ein früher Wegbereiter dieses Trends.
Dirk Nowitzkis Karrierewerte liegen bei 47,1 % Feldwurfquote, 38,0 % Dreierquote, 87,9 % Freiwurfquote und 51,2 % effektiver Feldwurfquote. Damit war er für einen 2,13-Meter-Spieler außergewöhnlich effizient — besonders, weil viele seiner Würfe aus der Mitteldistanz, aus dem Fadeaway oder von der Dreierlinie kamen. https://www.basketball-reference.com/players/n/nowitdi01.html
Was Roboter von Nowitzki lernen können
Roboter sind stark im Rechnen. Sie können Winkel, Kraft und Flugbahn in Sekundenbruchteilen bestimmen. Aber Basketball ist mehr als eine Formel. Ein echter Wurf entsteht aus Bewegung, Timing und Anpassung.
Ein Roboter wie CUE kann unter kontrollierten Bedingungen extrem präzise sein. Doch ein Basketballspiel ist chaotisch: Spieler bewegen sich, der Ball springt, Gegner stören, der Körper ist nicht immer perfekt ausgerichtet. Genau dort liegt die nächste große Herausforderung.
Die Roboter der Zukunft müssen nicht nur werfen können. Sie müssen Spielsituationen verstehen, Entscheidungen treffen und ihren Körper flexibel einsetzen.
Fazit
Humanoide Basketball-Roboter zeigen eindrucksvoll, wie weit Robotik und KI bereits gekommen sind. Sie können Körbe treffen, Rekorde aufstellen und immer menschlichere Bewegungen ausführen.
Trotzdem bleibt der perfekte Basketballwurf etwas Besonderes. Bei Menschen verbindet er Physik, Training, Körpergefühl und Kreativität. Bei Robotern zeigt er, wie Maschinen lernen, komplexe Bewegungen zu kontrollieren.
Vielleicht spielt eines Tages ein humanoider Roboter in einem echten Basketballspiel mit. Bis dahin zeigt uns die Technik vor allem eines: Der perfekte Wurf ist nicht nur Sport — er ist angewandte Physik.
FuxFun
Wusstest du, dass Toyotas Basketball-Roboter CUE nicht als großes Firmenprojekt begann, sondern 2017 als freiwillige Idee von Mitarbeitenden? Aus einem Experiment wurde ein Guinness-Weltrekord-Roboter.
Für Profis
Spannend ist der Unterschied zwischen Abwurfwinkel und Eintrittswinkel. Der Abwurfwinkel beschreibt, in welchem Winkel der Ball die Hand verlässt. Der Eintrittswinkel beschreibt, wie steil der Ball am Korb ankommt. Für erfolgreiche Würfe ist nicht nur der Start wichtig, sondern auch, wie der Ball am Ring eintrifft. Studien betonen außerdem, dass der optimale Wurf individuell ist und von Körpergröße, Abwurfhöhe, Entfernung und Konstanz abhängt.
Quellen
Toyota Global: Entwicklung und Guinness-Rekord von CUE. Guinness World Records: Farthest basketball shot by a humanoid robot. Toyota Times: Vorstellung von CUE7. SWR Sport: „Dirk Nowitzki – Der perfekte Wurf im Basketball“. Studien zur Physik und Biomechanik des Basketballwurfs.
Buchempfehlung
Humanoide Basketball-Roboter zeigen, wie faszinierend die Verbindung aus Technik, Bewegung und Künstlicher Intelligenz ist. Mehr über diese Themen erfährst du in meinem Buch „Roboter & KI“ aus der SchlauFUX-Reihe vom Kosmos Verlag.
Dort geht es darum, wie Roboter sehen, lernen, entscheiden und handeln — und wie KI unsere Zukunft verändert. Verständlich erklärt, spannend erzählt und mit vielen Mitmach-Ideen.
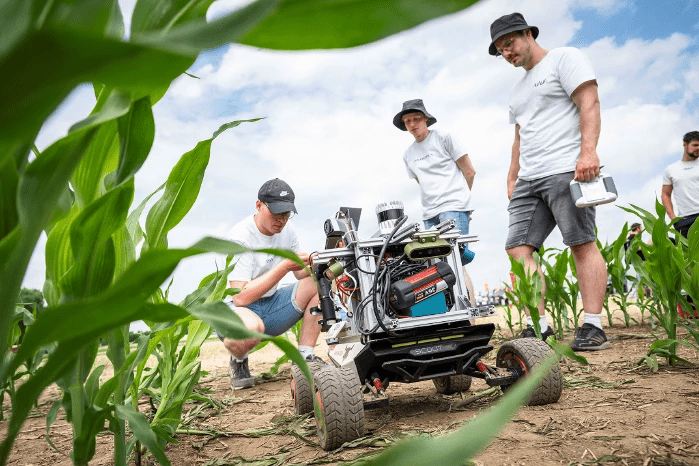
Gemeinsames Team der beiden Osnabrücker Hochschulen setzt sich beim Internationalen Feldroboter-Wettbewerb 2026 durch und holt den zweiten Weltmeistertitel in Folge.
Der Feldroboter Acorn made in Osnabrück hat eine besonders schmale Fahrspur und kann sowohl kranke Pflanzen als auch Insekten zuverlässig erkennen. Copyright: DLG
Im Maisfeld genau navigieren, den Boden gezielt behandeln sowie Tierarten und kranke Pflanzen auf dem Feld richtig erkennen – diesen Aufgaben stellten sich autonome Feldroboter beim diesjährigen Field-Robot-Event. Das Team Acorn des Osnabrücker Robotervereins Osnabotics hat dabei den Gesamtsieg geholt. Weltmeister aus Osnabrück – zum zweiten Mal in Folge
Dem Siegerteam gehören 22 Studierende und Promovierende der Hochschule Osnabrück und der Universität Osnabrück an. Sie gewannen vier der fünf Disziplinen und verteidigten damit ihren Weltmeistertitel aus dem Vorjahr. Den zweiten Platz belegte das Team Robatic Bullseye der Universität Wageningen (Niederlande), Rang drei ging an das Team FREDT der TU Braunschweig.
Wieder Weltmeister: Das Team Acorn des Osnabrücker Robotervereins Osnabotics hat beim diesjährigen Field-Robot-Event nach seinem Erfolg 2025 erneut den Gesamtsieg geholt. Copyright: DLG
16 Teams aus zehn Ländern
Beim internationalen Field-Robot-Event treten Hochschulteams mit ihren selbstentwickelten Robotern gegeneinander an. Der diesjährige Wettbewerb brachte während der DLG-Feldtage 16 Teams auf dem Internationalen DLG-Pflanzenbauzentrum in Bernburg (Sachsen-Anhalt) zusammen. 135 Teilnehmende aus China, Deutschland, Großbritannien, Italien, den Niederlanden, Norwegen, Polen, Portugal, Slowenien und der Türkei stellten ihr technisches Können, Teamgeist und Kreativität unter Beweis. Bei meist sonnigem Wetter mit angenehmen 25 Grad standen vier Tage lang unterschiedliche Disziplinen auf dem Programm, übernachtet haben die Teams auf dem Messe-Zeltplatz in der Nähe. In den wenigen freien Stunden konnten sich die Teilnehmenden auf der Messe ihren persönlichen Interessen widmen.
Zwei Sieger-Roboter made in Osnabrück
Die Osnabrücker haben sich seit März auf den Wettbewerb im Juni vorbereitet. Dafür haben Andreas Klaas, Arthur Schreiber, Fabian Buitkamp, Frederik Hartmann, Isaak Ihorst, Jan Carstens, Jannik Jose, Julian Kronenberg, Justus Braun, Justus Klingner, Lena Schötker, Luca Otto, Malte Klöpping, Natalie Puls, Nico Thiessen, Philipp Gehricke, Philipp Schein, Philipp Schlinge, Simon Balzer und Marco Tassemeier eigenständig zwei Roboter entwickelt, gebaut, programmiert und getestet. Im Fokus standen vor allem Stabilisierungen der Navigation und die erste Integration eines vollständig autonomen Roboterarms auf einer fahrenden Plattform – ein großer Schritt in der Komplexität des Roboters.
„Acorn hat eine besonders schmale Fahrspur und einen 3D‑Laserscanner, der die freie Fahrspur von den Pflanzen unterscheidet. Zudem kann er mit zwei seitlich angebrachten Tiefenkameras sowohl kranke Pflanzen als auch Insekten zuverlässig erkennen“, erzählt der studentische Teamkapitän Fabian Buitkamp, der im Informatik-Master an der Universität studiert.
Der zweite Osnabrücker Feldroboter, Bcorn, ist speziell für die Bodenbehandlung ausgerüstet: Er trägt einen präzisen Roboterarm mit einem Bohrer. Eine Tiefenkamera am Arm sorgt für die exakte Positionierung des Bohrers, während die Rundumsicht der 270‑Grad‑Kamera ein rasches Auffinden der Markierungen gewährleistet.
Teambetreuer: „Vielversprechende Zukunft der Feldrobotik in Osnabrück“
„Besonders auffällig war für mich dieses Jahr unser Engagement für den Wettbewerb“, erzählt Christopher Sieh. Der Promovend und wissenschaftlicher Mitarbeiter der Universität Osnabrück hat zusammen mit seinem Hochschul-Kollegen Eduard Gode das Siegerteam betreut: „Während andere Teams Probleme bei der Suche nach Teilnehmenden hatten, wuchs unser Team weiter an, was eine vielversprechende Zukunft der Feldrobotik in Osnabrück und Umgebung erwarten lässt.“ Gerade diese Kombination aus Routiniers und neuen Studierenden habe es dem Team ermöglicht, in kürzester Zeit komplexe Systeme zu bauen, während stets neue Ideen eingeflossen sind. Deshalb freue es Christopher Sieh sehr, dass alle Teilnehmenden ihren Teil zum Sieg beitragen und dadurch ihr gelerntes Wissen aus dem Studium deutlich vertiefen konnten: „Gerade in der Robotik ist Erfahrung ein sehr wichtiger Teil, der über Vorlesungen oder Übungen kaum vermittelt werden kann.“
Studierende: „Eingespieltes Team, funktionierender Roboter und wertvoller Austausch“
Das bestätigen auch Studierende: „Es hat Spaß gemacht, mit spontanen Problemen konfrontiert zu werden und sie in einem begrenzten Zeithorizont mit anderen Menschen zu lösen“, sagt Justus Klingner, Masterstudent der Wirtschaftsinformatik an der Universität: „Für eine erfolgreiche Teilnahme wird weitaus mehr benötigt, als einen funktionierenden Roboter zu haben. Ein eingespieltes Team und Vertrauen ineinander sind Voraussetzungen für den Erfolg.“
Der Osnabrücker Roboter Bcorn ist speziell für die Bodenbehandlung ausgerüstet und trägt einen Roboterarm, der auch während der Fahrt präzise arbeitet. Copyright DLG
Ähnlich sieht es Natalie Puls, Bachelorstudentin der Agrarsystemtechnologien an der Hochschule: „Ich war das erste Mal dabei und habe gelernt, wie wichtig es ist, den Spaß – besonders unter Zeitdruck – nicht aus den Augen zu verlieren. Das Mitfiebern während der einzelnen Aufgaben beim Wettkampf, die Spannung, ob alles klappt, aber natürlich auch der Austausch mit den anderen Teams – das hat mir am meisten Spaß gemacht.“
Engagierter Verein betreut das erfolgreiche Team
Bereits im Vorjahr, nach dem Sieg beim Wettbewerb in Mailand, hat das Weltmeisterteam angekündigt, einen eigenen Verein ins Leben zu rufen. Inzwischen ist es Realität geworden: Im Herbst 2025 wurde Osnabotics e. V. gegründet, der seither die Betreuung des Teams übernimmt. Dem Verein gehören Studierende, Alumni, Forschende und Praxispartner*innen im Bereich Robotik an. Ziel des Vereins ist es, gemeinsame Entwicklungsprojekte zu organisieren, die Teilnahme an Wettbewerben zu koordinieren und den fachlichen Austausch in der Region dauerhaft zu strukturieren.
Im Verein sind Studierende der beiden Hochschulen aus allen Fachrichtungen willkommen. Das reine Interesse für Robotik reicht zum Start aus. „Wir haben auch Themen abseits von Ingenieurstudiengängen – etwa Medienarbeit oder Projektplanung“, sagt Christopher Sieh. Interessierte können sich über die Mailadresse [email protected] beim Verein melden.
Dank an die Unterstützer
Das Osnabrücker Team dankt herzlich den AMAZONEN-WERKEN H. DREYER SE & Co. KG, Allied Vision Technologies GmbH, Nature Robots GmbH, iotech GmbH und weiteren Spendern für ihre Unterstützung. Nur dank ihrem Engagement war die Finanzierung der Fahrt und der Teilnahmegebühren möglich.
Letzte Woche, am 11. Juni 2026, ist die Fußball-WM gestartet: Mexiko eröffnete das Turnier im Azteca-Stadion in Mexiko-Stadt gegen Südafrika und gewann 2:0. Die WM 2026 findet erstmals in drei Ländern statt: Mexiko, USA und Kanada.
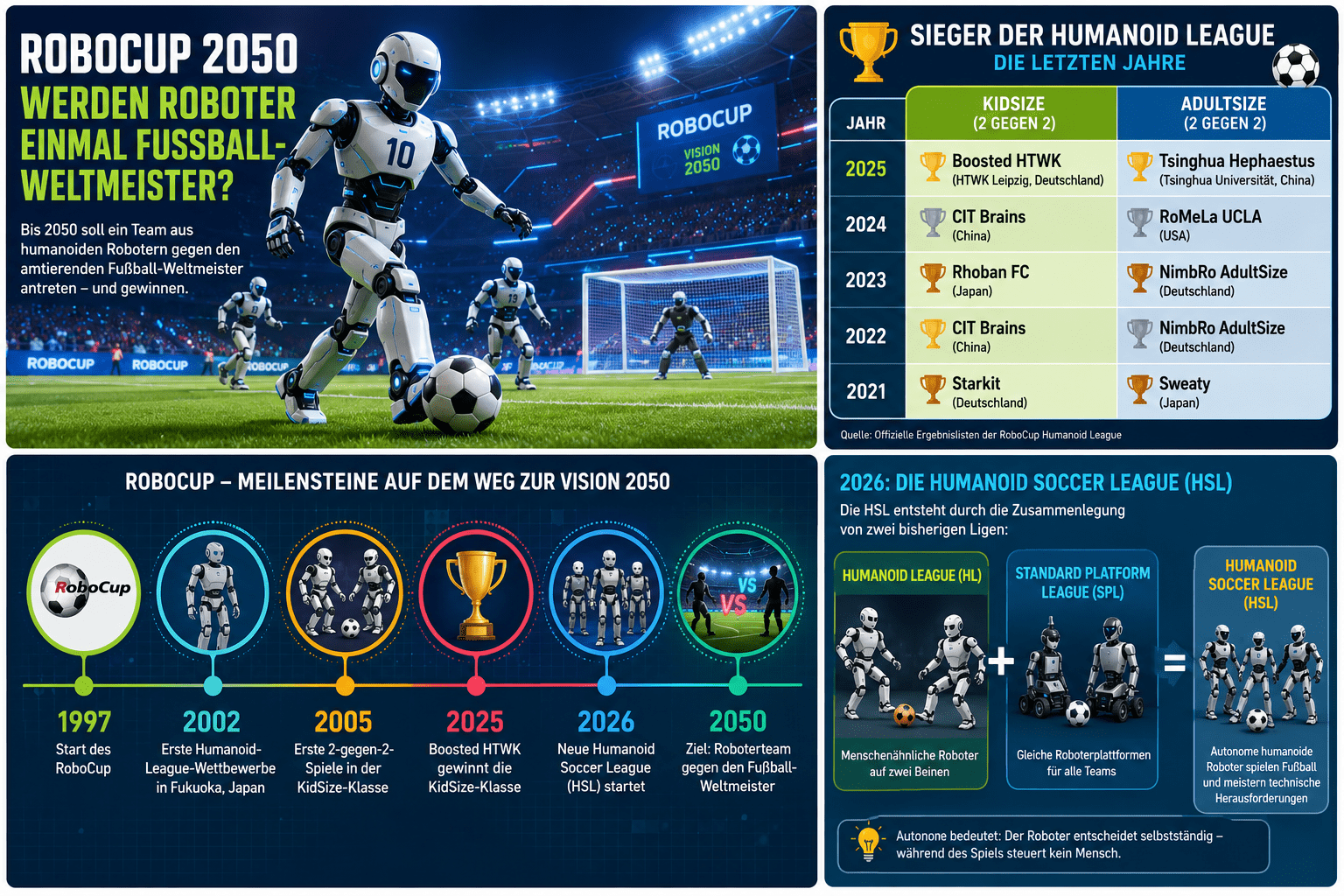
Während die besten Fußballer der Welt um den Pokal kämpfen, verfolgt der RoboCup ein eigenes Ziel: Bis 2050 soll ein Team aus humanoiden Robotern gegen den amtierenden menschlichen Fußball-Weltmeister antreten – und gewinnen.
Klingt wie Science-Fiction? Genau deshalb ist es so spannend.
Wie hat alles begonnen?
Der RoboCup wurde 1997 gegründet. Seine große Vision: Roboter sollen nicht nur ferngesteuert herumrollen, sondern selbstständig sehen, denken, laufen, passen und Tore schießen.
Die Humanoid League, also der Wettbewerb für menschenähnliche Roboter, kam später dazu. Ihr erster Wettbewerb fand 2002 in Fukuoka, Japan statt. Damals war das Ziel noch extrem mutig: Einen Roboter zu bauen, der auf zwei Beinen laufen und Fußball spielen kann. In den ersten Jahren gab es eher Aufgaben wie Balancieren, Elfmeterschießen oder kurze Demonstrationen. Richtige 2-gegen-2-Spiele in der KidSize-Klasse wurden ab 2005 eingeführt.
Fußball ist für Roboter nämlich ein perfekter Härtetest: Sie müssen den Ball erkennen, ihren Platz auf dem Feld verstehen, mit anderen Robotern zusammenarbeiten, dabei nicht umfallen und sich an geltende Regeln halten.
Wo stehen wir 2026?
Humanoiden Roboterfußball gibt es schon seit über 20 Jahren. Seit 2026 gibt es die neue Humanoid Soccer League, kurz HSL.
Diese HSL entsteht durch die Zusammenlegung der früheren Humanoid League und der Standard Platform League. Sie findet beim RoboCup 2026 erstmals in dieser neuen Form statt. In der HSL spielen vollständig autonome humanoide Roboter Fußball und treten zusätzlich in technischen Herausforderungen an.
„Autonom“ bedeutet: Während des Spiels steuert kein Mensch den Roboter. Der Roboter entscheidet selbst, wohin er läuft, wann er schießt und wem er ausweicht.
Ein großer Erfolg aus dem Vorjahr: Beim RoboCup 2025 in Salvador, Brasilien, gewann Boosted HTWK von der HTWK Leipzig die Humanoid League Kid Size. Das Finale gegen TH-MOS endete laut heise deutlich mit 11:0. In der Adult Size gewann Tsinghua Hephaestus.
Tabelle: Sieger der Humanoid League in den letzten Jahren
Die erste große Aufgabe ist das Laufen. Menschen rennen, stoppen und drehen sich fast automatisch. Für einen Roboter ist jeder Schritt eine Rechenaufgabe. Der Boden kann rutschen, ein Gegner kann stoßen, und schon liegt der Roboter auf dem Rücken.
Die zweite Aufgabe ist das Sehen. Ein Roboter bekommt Kamerabilder und muss daraus erkennen: Wo ist der Ball? Wo ist das Tor? Wer ist Mitspieler, wer Gegner? Für dich ist das selbstverständlich. Für eine Maschine ist es knifflig.
Die dritte Aufgabe ist Teamarbeit. Ein guter Fußballer erkennt Räume, täuscht Gegner und spielt im richtigen Moment ab. Roboter müssen solche Entscheidungen mit Sensoren, Algorithmen und Funkverbindungen treffen.
Und dann kommt noch die vierte Aufgabe: Tempo. Profifußballer reagieren blitzschnell. Roboter sind zwar besser geworden, aber oft noch langsamer, vorsichtiger und weniger kreativ.
Wie wahrscheinlich ist das Spiel 2050?
Ein Showspiel gegen den amtierenden Weltmeister im Jahr 2050 halte ich für gut möglich. Dass ein humanoides Roboterteam dann wirklich gewinnt, ist schon viel schwieriger. Bis 2050 sind es noch 24 Jahre. In dieser Zeit werden Motoren, Batterien, Kameras und Künstliche Intelligenz viel besser werden. Trotzdem ist Fußball nicht nur Rechnen. Es geht um Körpergefühl, Überraschung, Mut und blitzschnelle Ideen.
Meine Einschätzung: Ein offizielles Spiel 2050 ist realistisch. Ein Sieg der Roboter ist möglich, aber nicht sicher – vielleicht eher eine Außenseiterchance.
Fazit
Der RoboCup ist mehr als Roboterfußball. Er ist ein riesiges Forschungslabor für die Zukunft. Was dort gelernt wird, kann später Rettungsrobotern, Assistenzrobotern oder Robotern im Alltag helfen.
Vielleicht schlagen Roboter 2050 noch nicht den Weltmeister. Aber sie werden bis dahin sehr viel besser darin sein, unsere Welt zu sehen, zu verstehen und sich darin zu bewegen.
FuxFun
Wusstest du, dass 2025 ein deutsches Team Roboter-Fußballweltmeister wurde? Boosted HTWK aus Leipzig gewann die humanoide KidSize-Klasse – und im Finale fielen ganze 11 Tore für die Leipziger Roboter.
Quellenverweis
Quellen: FIFA, Reuters, RoboCup Federation, RoboCup Humanoid League, Humanoid Soccer League und heise. Besonders wichtig sind die offiziellen RoboCup-Ergebnislisten und die HSL-Erklärung zur Zusammenlegung der bisherigen Ligen.
Buchempfehlung
Noch mehr über Roboter und Künstliche Intelligenz erfährst du im Buch „Roboter & KI“ aus der SchlauFUX-Reihe vom Kosmos Verlag – für junge Entdeckerinnen und Entdecker ab 8 Jahren. https://amzn.to/4oL1232
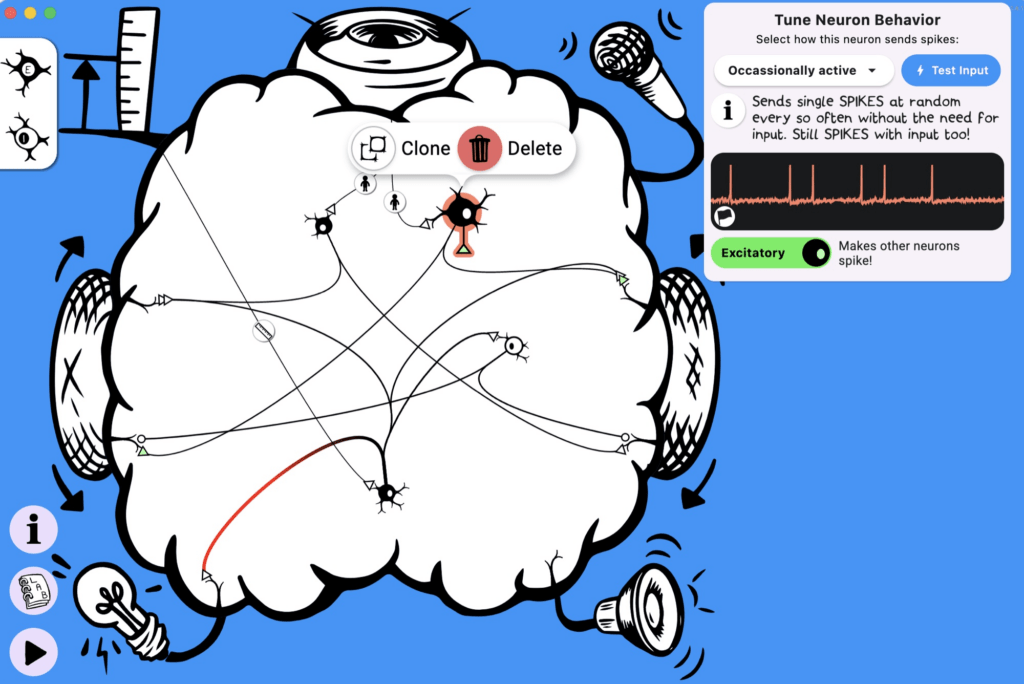
Backyard Brains launched SpikerBot on Kickstarter, a desktop robot whose behavior is controlled by spiking neural networks that kids build themselves. Instead of typing code or prompting a chatbot, students drag biologically inspired neurons into a no-code app, connect them to sensors and motors, and watch the robot move, react, speak, and change behavior in real time.
SpikerBot is designed to feel like a creature, not a robot. Wire visual neurons to the motors and it can chase a red ball. Change the connection and it can avoid that same object. Add sensors, sounds, inhibition, circuits that can hold short-lived internal states, or a second robot, and the behavior starts to feel less scripted and more alive. The point is not to memorize neuroscience vocabulary. The point is to test an idea, see what happens, and rebuild the brain until the creature behaves the way the child imagined.
That makes SpikerBot an educational robot with a concrete outcome: kids practice prediction, debugging, iteration, and critical thinking while learning how neurons and circuits shape behavior. It is built for families, classrooms, maker spaces, and curious adults who want a hands-on alternative to passive screen time and black-box AI tools.
SpikerBot grew out of years of NIH-supported research by Backyard Brains, the Ann Arbor company known for making neuroscience accessible outside the laboratory. In earlier classroom workshops using the neurorobotics platform, 295 high-school students built and tested robot brains over a one-week unit. The peer-reviewed study, published in Frontiers in Neurorobotics (doi.org/10.3389/fnbot.2020.00006), found significant gains in students‘ understanding of key neuroscience concepts and confidence in neuroscience.
„Kids do not need another device that gives them answers,“ said Greg Gage, co-founder and CEO of Backyard Brains. „They need something they can question, change, break, and fix with their own hands. SpikerBot makes the brain visible. You change a synapse, and the creature changes.“
The robot includes a camera, microphone, speaker, distance sensors, drive wheels, RGB LEDs, a customizable body shell, and a free SpikerBot app with pre-built brain examples. Learners can start with simple predator, explorer, reflex, or shy-creature circuits, then take them apart and build their own. Advanced users can hack the open-source platform and connect external sensors, game controllers, or Backyard Brains SpikerBit Brain-Machine Interface product.
Backyard Brains‘ SpikerBot development was supported by the National Institutes of Health through NINDS SBIR Phase II grant 2R44NS108850-03A1. „Public science funding helped us turn a research idea into something students can hold, test, and understand,“ Gage said. „Kickstarter is the path to move it from final development into the hands of families and teachers.“
SpikerBot is available on Kickstarter beginning May 12, 2026. Early-bird pledges begin at $199, with standard Kickstarter pledges at $239 and a planned retail price of $300. Units are expected to ship in September 2026. The recommended age range is 10 to 99.
ABOUT BACKYARD BRAINS
Backyard Brains was founded in 2009 in Ann Arbor, Michigan, to make neuroscience accessible. The company builds hands-on tools that let students, teachers, families, and curious citizens investigate the nervous system directly. Its products and curricula are used in classrooms, labs, makerspaces, and homes around the world, supported by grants from the NIH, NSF, and the Department of Defense, and have been featured in The New York Times, BBC, WIRED, TED, Netflix, NPR, Science Friday, Good Morning America, and Last Week Tonight.
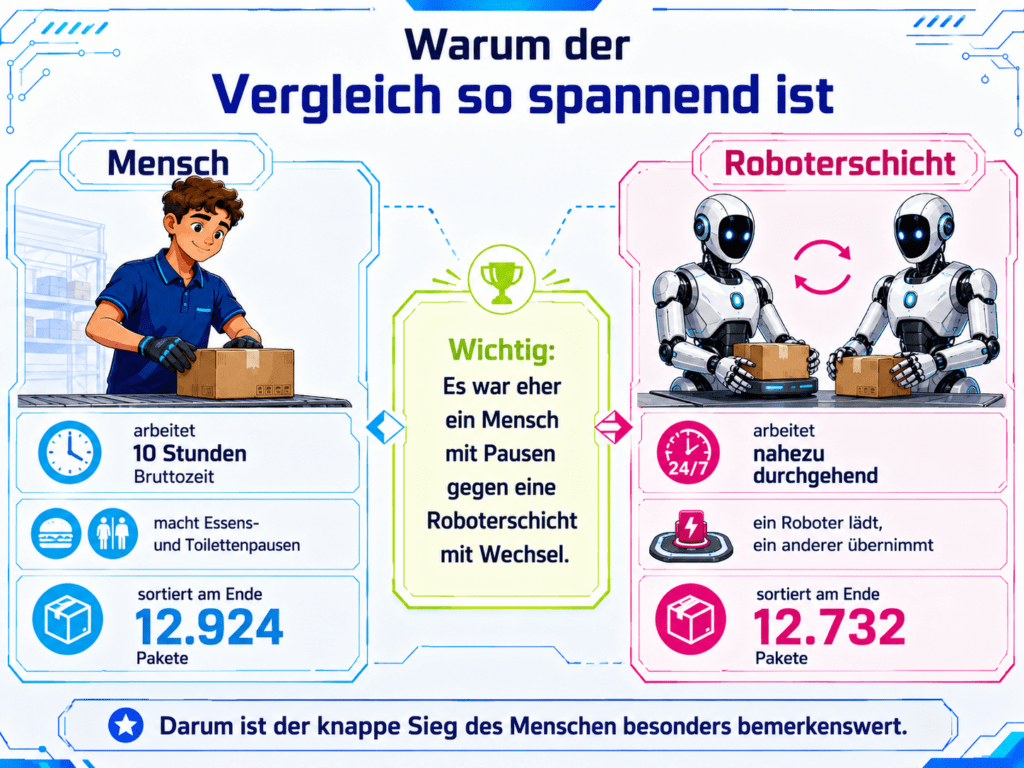
Stell dir vor, du stehst zehn Stunden lang an einem Förderband. Immer wieder kommt ein kleines Paket vorbei. Du musst es greifen, drehen und so auf das Band legen, dass der Barcode richtig liegt. Klingt einfach? Nach ein paar Stunden brennen wahrscheinlich deine Arme.
Genau so einen Wettbewerb hat das Robotik-Unternehmen Figure AI gezeigt: Ein Mensch trat gegen humanoide Roboter der Reihe Figure 03, kurz F.03, an. Das Ergebnis war überraschend knapp – und zeigt, wie nah moderne Roboter bei einfachen Lageraufgaben schon an Menschen herankommen.
Was war die Aufgabe?
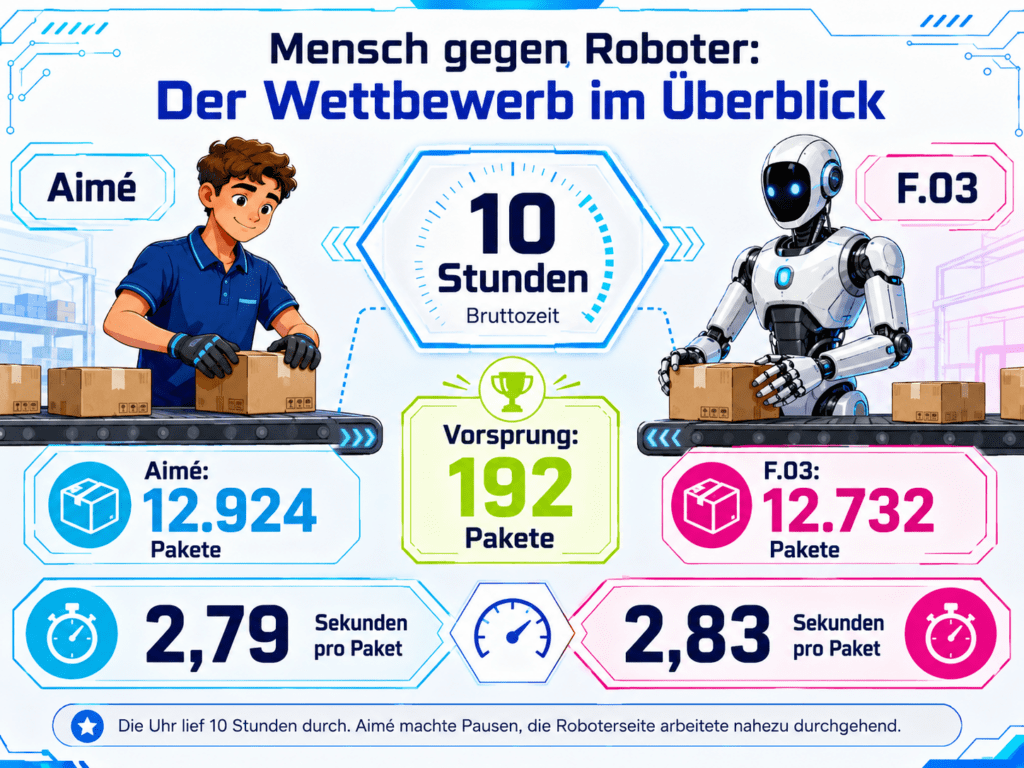
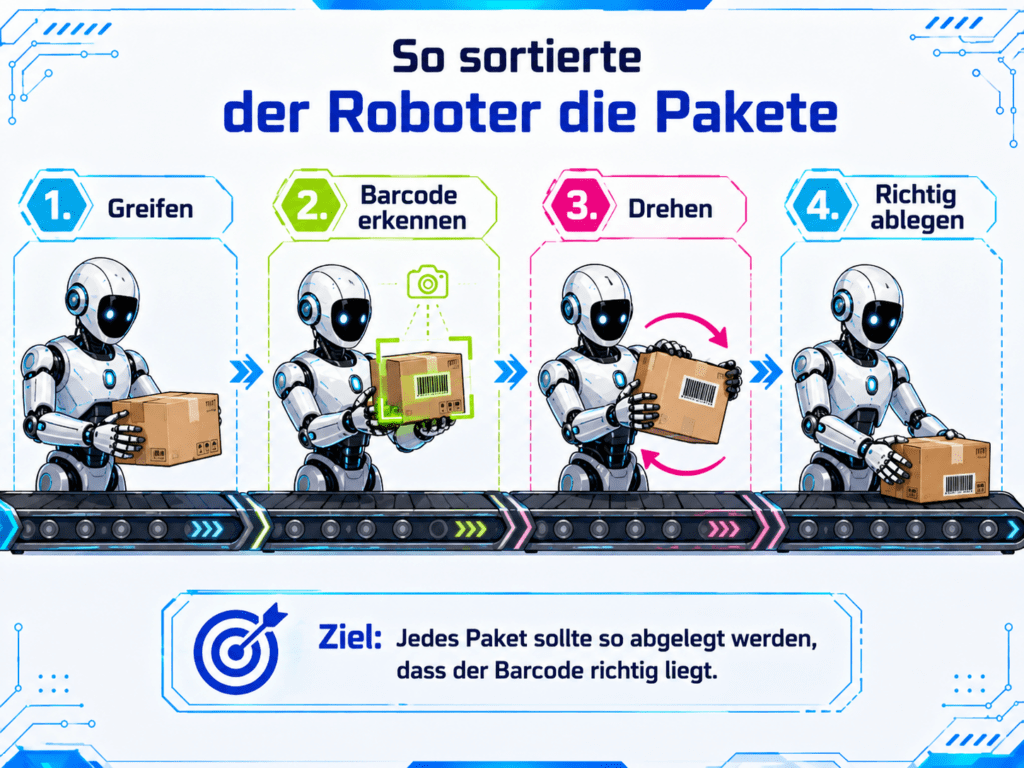
Die Aufgabe war klar und gut messbar: Pakete aufnehmen, den Barcode erkennen und das Paket passend auf ein Förderband legen. Der Wettbewerb lief über 10 Stunden Bruttozeit. Das bedeutet: Die Uhr lief durch, auch wenn der Mensch zwischendurch Pausen machte.
Der menschliche Teilnehmer hieß Aimé Gérard. Er gewann knapp: Aimé sortierte 12.924 Pakete, die Roboterseite 12.732 Pakete. Das sind nur 192 Pakete Unterschied. Umgerechnet brauchte Aimé im Durchschnitt 2,79 Sekunden pro Paket, F.03 2,83 Sekunden pro Paket. Figure-Chef Brett Adcock schrieb danach sinngemäß, dies sei wohl das letzte Mal gewesen, dass ein Mensch so einen Wettbewerb gegen einen Roboter gewinnt.
Wichtig: Es war nicht einfach „ein Mensch gegen einen Roboter“
Hier muss man sehr genau sein. Aimé war ein Mensch und musste sich an normale Arbeitsregeln halten. Laut Business Insider hatte er Pausen, zum Beispiel für Essen, Toilette und kurze Erholung. Ungefähr nach fünf Stunden ging er zur Toilette – und genau da konnte der Roboter kurz in Führung gehen.
Die Roboterseite hatte einen anderen Vorteil: Sie konnte als durchgehender Robotereinsatz organisiert werden. Bei Figures Livestream sortierte ein Roboter, während andere Roboter auf Ladeplätzen standen und einspringen konnten, wenn der arbeitende Roboter Energie brauchte. Das heißt: Fair beschrieben war es eher ein Mensch mit Pausen gegen eine Roboterschicht mit Wechselmöglichkeit – nicht einfach ein einzelner Roboter, der zehn Stunden ohne jede Unterbrechung durchhielt.
Figure selbst schreibt, dass Figure 03 per induktivem Laden Energie bekommen kann. Die Ladespulen sitzen in den Füßen; der Roboter kann auf eine Ladestation treten. Für kommerzielle Einsätze beschreibt Figure sogar „near-continuous operation“, also nahezu durchgehenden Betrieb, wenn der Roboter zwischendurch auf eine Ladematte gehen kann.
Was ist Figure 03?
Figure 03 ist ein humanoider Roboter. „Humanoid“ bedeutet: Er ist ungefähr wie ein Mensch aufgebaut – mit Armen, Händen, Beinen und einem Körper. Das ist praktisch, weil viele Orte, Werkzeuge und Arbeitsplätze für Menschen gemacht sind.
Figure 03 nutzt laut Figure eine KI namens Helix. Du kannst dir Helix wie ein digitales Gehirn vorstellen, das Bilder, Sprache und Bewegungen zusammenbringt. Der Roboter soll also nicht nur „sehen“, sondern daraus auch passende Handlungen machen. Figure beschreibt außerdem bessere Kameras, Sensoren in den Fingern und Hände, die Dinge stabiler greifen sollen. Die Fingersensoren sollen sogar sehr kleine Kräfte erkennen können – etwa das Gewicht einer Büroklammer.
Warum ist der Test spannend?
Roboter in Fabriken gibt es schon lange. Viele davon sind aber fest montierte Roboterarme, die immer dieselbe Bewegung machen. Humanoide Roboter sind schwieriger: Sie sollen sich in einer Umgebung bewegen, die eigentlich für Menschen gebaut wurde.
Genau deshalb ist der Pakete-Test interessant. Er zeigt nicht alles, aber er zeigt eine wichtige Sache: Ein humanoider Roboter kann eine einfache, wiederholte Aufgabe über lange Zeit ziemlich schnell erledigen. Und wenn mehrere Roboter als Team eingesetzt werden, können sie Pausen, Laden und Wechsel besser organisieren als ein einzelner Mensch.
Was zeigt der Wettbewerb nicht?
Der Test bedeutet nicht, dass Roboter morgen alle Lagerjobs übernehmen. Ein echtes Lager ist viel komplizierter. Pakete können zerknittert, schwer, rutschig oder falsch beschriftet sein. Menschen laufen herum. Förderbänder stoppen. Manchmal muss man improvisieren.
Business Insider zitiert die Robotik-Expertin Ayanna Howard mit der Einschätzung, dass voll autonome humanoide Roboter in echten Logistikzentren noch ein weiter Weg sind. Als Probleme nennt der Bericht zum Beispiel falsch herum abgelegte Pakete oder Pakete, die vom Band gestoßen wurden.
Fazit
Der Mensch hat gewonnen – aber nur knapp. Aimé Gérard war schneller, obwohl er Pausen machen musste. Die Roboterseite konnte dagegen fast durchgehend arbeiten, weil Roboter beim Laden wechseln konnten. Genau das macht den Wettbewerb so spannend: Menschen sind bei einfachen Greifaufgaben noch erstaunlich stark. Aber Roboter holen auf – nicht unbedingt als einzelner Super-Roboter, sondern als gut organisiertes Team.
Die Zukunft wird deshalb wahrscheinlich nicht nur „Mensch gegen Maschine“ heißen. Viel wichtiger wird die Frage: Welche Aufgaben erledigen Roboter besser, welche Menschen – und wie arbeiten beide sicher zusammen?
FuxFun
Wusstest du, dass Zuschauer den Figure-Robotern im Livestream Spitznamen wie Bob, Frank und Gary gegeben haben? Aus einem Techniktest wurde dadurch fast eine kleine Roboter-Serie.
Für Profis
Mehr Details findest du in Figures offizieller Vorstellung von Figure 03 sowie im Bericht von Business Insider zum 10-Stunden-Wettbewerb. Besonders spannend sind die technischen Punkte zu Helix, den Fingersensoren und dem induktiven Laden.
Quellenverweis
Quellen: Figure AI: „Introducing Figure 03“; Business Insider: „Figure AI had one of its robots race an intern to sort packages. See who lost“; ursprünglicher Anlass: WinFuture-Bericht zum Figure-Wettbewerb.
Buchempfehlung
Mehr über Roboter und Künstliche Intelligenz erfährst du im Buch „Roboter & KI“ aus der SchlauFUX-Reihe vom Kosmos Verlag. Das Buch richtet sich an junge Entdeckerinnen und Entdecker und erklärt Robotik und KI kindgerecht.
Der Kosmos Gecko-Bot ist ein Experimentierkasten für Kinder ab acht Jahren, bei dem ein kleiner, geckoähnlicher Kletterroboter aus rund 50 Teilen zusammengebaut wird. Das Set verbindet einen spielerischen Aufbau mit einfachen technischen und physikalischen Grundlagen und richtet sich an Kinder, die gern konstruieren und Funktionsweisen nachvollziehen.
Beim Aufbau zeigt sich, dass der Bausatz die Verbindung von Mechanik und Bionik anschaulich macht. Der Roboter wird so konstruiert, dass er mithilfe seiner Saugnapf-Füße an glatten Flächen klettern kann, etwa an Fenstern oder gefliesten Wänden. Das beiliegende Experimentierheft führt Schritt für Schritt durch den Zusammenbau und erklärt außerdem die Grundlagen von Adhäsion und der Funktionsweise von Saugnäpfen.
Zu den sichtbaren Merkmalen des Sets gehören die großen Knopfaugen, die bunten Bauteile und die Bewegung des Roboters beim Klettern. Diese Gestaltung sorgt dafür, dass der Gecko-Bot klar als Spiel- und Lernobjekt erkennbar ist. Die Zielsetzung des Kastens liegt weniger in komplexer Technik als in einem einfachen, gut nachvollziehbaren Lernmodell für mechanische Abläufe.
Im Praxiseindruck wird deutlich, dass der Erfolg des Modells von einem sorgfältigen Aufbau abhängt. Die Kletterfunktion funktioniert nur auf geeigneten glatten Oberflächen, und die Saugnäpfe müssen korrekt sitzen, damit der Roboter zuverlässig in Bewegung bleibt. Damit eignet sich das Set vor allem für Kinder, die ruhig und genau arbeiten, sowie für Erwachsene, die ein erklärendes Bastelprojekt suchen.
Insgesamt ist der Kosmos Gecko-Bot ein sachlich aufgebauter Experimentierkasten mit klar umrissenen Funktionen: Zusammenbauen, Bewegung beobachten und grundlegende Physik verstehen. Das Set enthält den Roboterbausatz mit Motor und Schalter, Saugnäpfe, Roboterbauteile, Zahnräder, Schrauben sowie eine farbig illustrierte Anleitung, die den Aufbau und die Funktionsweise erklärt. Ich habe für den Aufbau etwa eine Stunde benötigt und hatte keine größeren Probleme dabei.
Kinder wachsen heute mit digitaler Technik auf. Tablets, Apps und vernetzte Geräte gehören zum Alltag. Aber wie funktioniert diese Technik eigentlich? 🤔
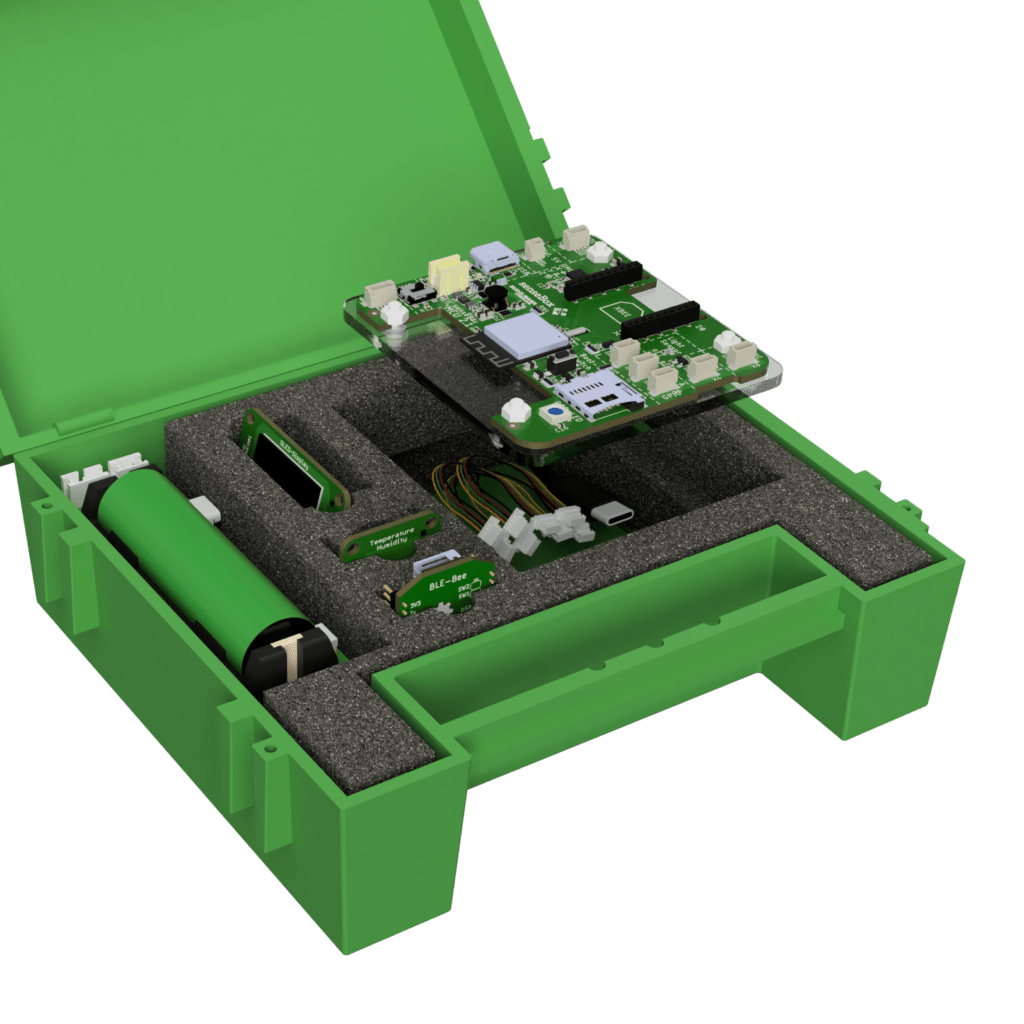
Mit der neuen senseBox:basic kommt bald ein Bausatz, der genau hier ansetzt: Digitale Bildung und informatische Grundbildung schon ab der Grundschule.
Bildrechte: Reedu GmbH & Co. KG
Informatische Grundbildung zum Anfassen
Die senseBox:basic wurde speziell für den niedrigschwelligen Einstieg in Programmierung und Sensorik entwickelt. Kinder lernen spielerisch und praxisorientiert, wie Sensoren funktionieren, wie Programme aufgebaut sind und wie Umweltdaten gemessen sowie ausgewertet werden. So wird aus dem reinen Nutzen digitaler Technologien ein fundiertes Verständnis für deren Funktionsweise.
Als vereinfachte Variante der bewährten senseBox:edu legt die senseBox:basic den Fokus auf einfache Bedienung, grundlegende Sensorprojekte und einen kostengünstigen Einstieg.
Damit eignet sie sich besonders gut für:
Grundschulen
erste Programmierprojekte
AGs und Workshops
informatische Grundbildung
Programmieren ohne Vorkenntnisse mit senseBox-Blockly
Damit der Einstieg leicht gelingt, wird mit senseBox-Blockly programmiert. Die Software steht als App kostenlos zur Verfügung. Hierbei werden Programme intuitiv aus visuellen Bausteinen zusammengesetzt – ganz ohne komplizierten Code. Kinder können zum Beispiel:
Sensorwerte auslesen
einfache Abläufe programmieren
eigene kleine Experimente entwickeln
So entstehen schnell erste eigene Projekte.
Bildrechte: Reedu GmbH & Co. KG
Welche Sensoren sind dabei?
Die senseBox:basic ermöglicht es, Umweltphänomene selbst zu erforschen:
BME680 Umweltsensor – Dieser Sensor misst gleich mehrere Dinge:Temperatur, Luftfeuchtigkeitund Luftqualität.
Lichtsensor – Der Lichtsensor misst die Helligkeit der Umgebung. Perfekt für Projekte wie, automatische Lichtreaktionen, Experimente zu Licht und Schatten sowie Messungen der Tageshelligkeit
Beschleunigungssensor – Der Sensor erkennt Bewegungen und Erschütterungen. Damit können Kinder zum Beispiel Bewegungsprojekte programmieren, Lage im Raum bestimmen oder einfache Reaktionssysteme bauen.
Mit einem Bluetooth-Bee und einem OLED-Display können die Messwerte ganz einfach übertragen und live visualisiert werden.
Kostenloses Lehr- und Lernmaterial
Zur senseBox:basic als Hardware wird es auch kostenlose Unterrichtsmaterialien geben.
Diese stehen als Open Educational Resources (OER) zur Verfügung und enthalten:
Projekte zum Nachbauen
Unterrichtsideen
Materialien für den Einstieg in Programmierung
Die Sammlung wird kontinuierlich erweitert.
Bildrechte: Reedu GmbH & Co. KG
Online-Meetup zur senseBox:basic
Wer mehr über die neue senseBox erfahren möchte ist herzlich zum kostenlosen Online-Meetup eingeladen. Dort stellt das Team von re:edu die senseBox:basic vor und beantwortet Fragen. Das senseBox-Meetup findet bis zum Sommer jeden zweiten Dienstag im Monat von 15–16 Uhr via Zoom statt. Der erste Termin ist am 14. April.
Mit der senseBox:basic wird der Einstieg in Programmierung, Sensorik und digitale Technologien bereits ab dem Grundschulalter möglich – einfach, praxisnah und mit viel Raum zum Experimentieren. Damit leistet sie einen wichtigen Beitrag zur frühzeitigen Förderung digitaler Kompetenzen. Nachdem das Produkt auf der Didacta 2026 erstmals im Rahmen einer Preview präsentiert wurde, ist es nun bereits im Shop erhältlich und die Auslieferung erfolgt in Kürze: https://sensebox.kaufen/products/sensebox-basic
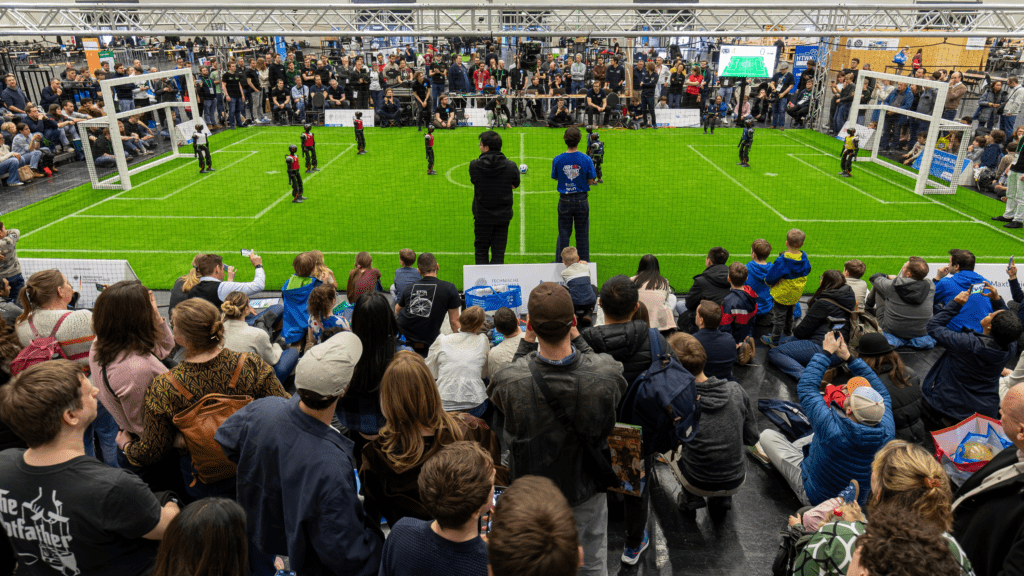
Über 1.100 Teilnehmende aus Deutschland, Europa und Asien in Köln. Bundesforschungsministerin Dorothee Bär würdigt Wettbewerb als „Talentschmiede“ für den Standort Deutschland. Wachstum von 15 Prozent bei Hochschul- und Schulteams unterstreicht steigende Bedeutung von KI und Robotik.
Die RoboCup German Open 2026 festigen ihre Position als führender europäischer Innovationsmotor für KI-basierte Robotik. Vom 10. bis 14. März versammelten sich im Rahmen der Bildungsmesse didacta in Köln über 1.100 Teilnehmende, um in visionären Szenarien wie dem autonomen Fußball, der Haushalts-, Industrie- oder Rettungsrobotik die Grenzen der Technik zu verschieben. Rund 280 hochmotivierte Teams aus Universitäten, Hochschulen und Schulen, präsentierten ihre Entwicklungen und setzten damit entscheidende Impulse für systematisches Benchmarking für Forschung und Technikreife.
Als Innovationsmotor adressieren die RoboCup German Open die gesamte Bildungskette von der 5. Klasse bis zur Promotion. Das Event sichert so den nachhaltigen Transfer von Talenten und Technologien in Wirtschaft und Wissenschaft. Besonders erfreulich ist dabei die wachsende Zahl an teilnehmenden Teams, die im Vergleich zum Vorjahr um mehr als 15 Prozent stieg.
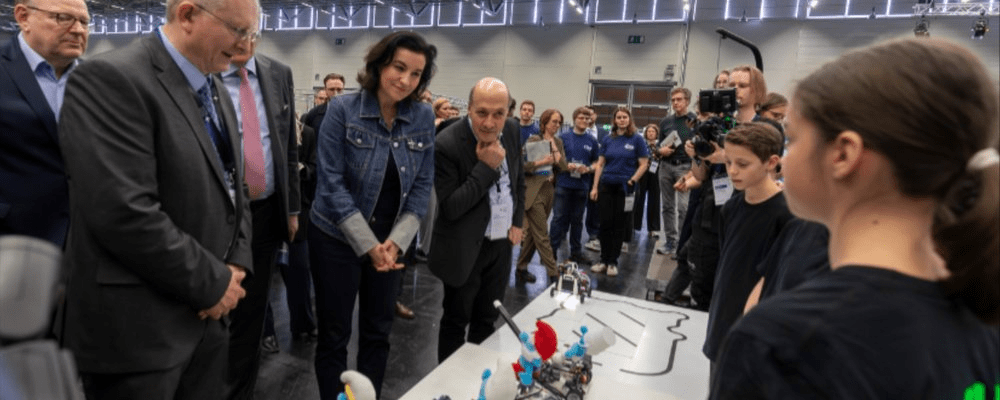
Bundesforschungsministerin Dorothee Bär unterstreicht die Bedeutung für Deutschland
„Ich gratuliere den Siegerteams der RoboCup German Open ganz herzlich“, so Dorothee Bär, Bundesministerin für Forschung, Technologie und Raumfahrt. „Nicht nur sie haben gewonnen, sondern gewonnen hat ganz Deutschland. Denn: Der RoboCup ist Talentschmiede und ein wichtiges Instrument, um jungen Menschen die KI-basierte Robotik näher zu bringen, um sie für MINT-Fächer und -Berufe oder die Gründung eigener Unternehmen im MINT-Bereich zu begeistern. Damit Spitzenforschung sichtbar wird und zukünftige Spitzenleute Innovation aus Deutschland voranbringen. Das ist auch ein Ziel unserer Hightech Agenda Deutschland. Deutschland hat eine starke Forschung und ist stark in der produzierenden Industrie und Wirtschaft – ein Ökosystem, in dem KI-basierte Robotik ein riesiges Potential entwickeln wird.“
Als Schirmherrin der RoboCup German Open 2026 hatte Bundesforschungsministerin Bär die Wettbewerbe offiziell eröffnet. Bei einem anschließenden Rundgang war sie mit Forschenden und Schülerinnen und Schülern über innovative Robotik-Lösungen in den Austausch gekommen.
Hochschul- und Schulteams mit selbstentwickelten autonomen Robotern am Start
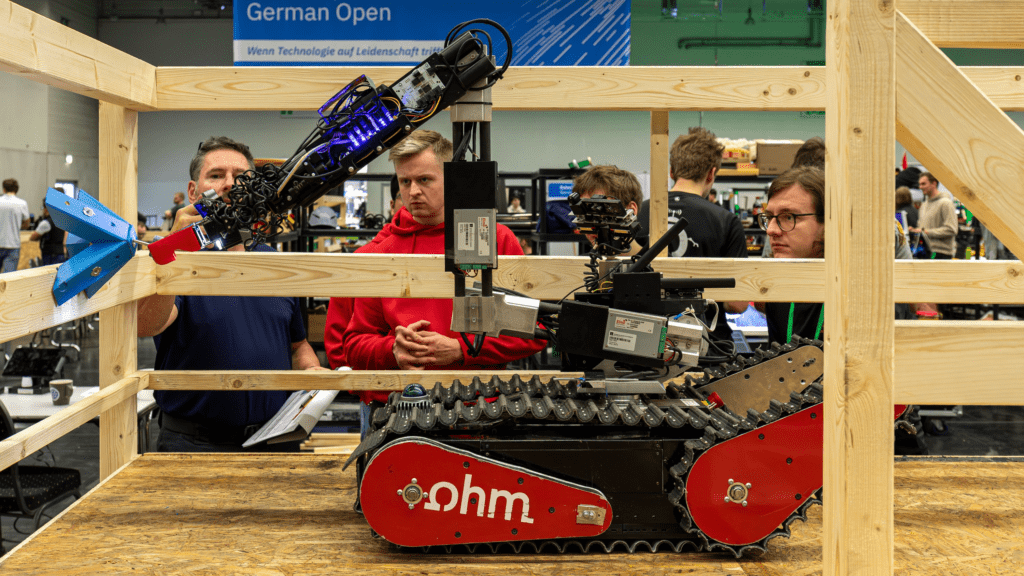
Für die RoboCupMajor-Ligen waren in diesem Jahr über 50 Hochschulteams vertreten, darunter Teams aus Deutschland, Italien, Österreich, Niederlande, Türkei, China und Japan. In den jeweiligen Ligen mussten die Roboter ganz oder teilweise autonom in Echtzeit komplexe, situationsabhängige Entscheidungen treffen und umsetzen. Besondere Herausforderungen bilden in den Ligen @Home (Serviceroboter) und insbesondere Rescue (Rettungsroboter) unterschiedliche Grade an Strukturiertheit der Umgebung. Demgegenüber steht bei Soccer (Fußball) Autonomie und Teamkooperation in einer besonders dynamischen Umgebung im Fokus. Systemstabilität wurde unter Wettbewerbsdruck benötigt, was auch sorgfältiges Ressourcen- und Zeitmanagement erforderte. „Durch die Wettbewerbsteilnahme erwerben Forschende und Studierende wichtige fachliche und überfachliche Qualifikationen, die weit über klassische Lehrveranstaltungen hinausgehen“, betonte Prof. Dr. Oskar von Stryk, vom deutschen RoboCup-Komitee und Veranstalter TU Darmstadt.
Im Bereich RoboCupJunior wurde auf den German Open das nationale Finale der besten deutschen Schulteams, insgesamt 230, ausgetragen. Diese hatten sich in neun regionalen Vorturnieren dafür qualifiziert. Für die Junior-Teilnehmenden von 10 bis 19 Jahren dient der Wettbewerb als Plattform, um den Spaß am Tüfteln, Programmieren und der Teamarbeit zu fördern. Dabei wirkt die Teilnahme langfristig: Viele Kinder, die bereits in der 5. Klasse in RoboCup-AGs einsteigen, bleiben über Jahre hinweg engagiert in Technik, Informatik und Naturwissenschaften. „Die hohe Eigenmotivation, Teamarbeit, Resilienz und kreative Problemlösefähigkeit der Jugendlichen sind beeindruckend und bilden genau jene Kompetenzen aus, die für eine zukunftsfähige Bildungsrepublik zentral sind“, so von Stryk.
Die Rapidly Manufactured Robot Challenge (RMRC) ist eine spezialisierte Brückenliga, in der Teilnehmende komplexe und dennoch kostengünstige, oft 3D-gedruckte Roboter entwickeln, um simulierte Rettungsmissionen und Geschicklichkeitsaufgaben zu bewältigen. Sie dient als Bindeglied zwischen den Junior- und Major-Wettbewerben.
Ausblick auf die Weltmeisterschaft
Viele der siegreichen Teams werden sich nun intensiv auf die kommenden RoboCupJunior-Europameisterschaften Anfang Juni in Wien sowie die RoboCup-Weltmeisterschaften Ende Juni in Südkorea vorbereiten. Die RoboCup German Open haben erneut gezeigt, dass sie eine unverzichtbare Station auf dem Weg zu internationalen Robotik-Erfolgen sind.
Im kommenden Jahr werden die RoboCup-Weltmeisterschaften erstmals seit über einem Jahrzehnt wieder in Deutschland ausgetragen, und zwar vom 15. bis 21. Juni 2027 in Nürnberg. Gleichzeitig ist dies das 30. Jubiläum des RoboCups, an welchem jährlich tausende Teams aus mehr als 50 Ländern in regionalen und überregionalen Wettbewerben weltweit teilnehmen.
Ergebnisse der Major-Ligen:
Small Size League 1. Platz – TIGERs Mannheim, DHBW Mannheim 2. Platz – ER-Force, Friedrich-Alexander-Universität Erlangen-Nürnberg 3. Platz – KIKS, National Institute of Technology, Toyota College
Humanoid Soccer League Small Devision 1. Platz – ZJUDancer, Zhejiang University 2. Platz – Hamburg Bit-Bots, Universität Hamburg 3. Platz – Berlin United, Humboldt-Universität zu Berlin
Middle Devision 1. Platz – B-Human, Universität Bremen und Deutsches Forschungszentrum für Künstliche Intelligenz 2. Platz – HTWK Robots, HTWK Leipzig 3. Platz – whIRLwind Amsterdam, University of Amsterdam (UvA)
Large Devision 1. Platz – B-Human, Universität Bremen und Deutsches Forschungszentrum für Künstliche Intelligenz
@Home League 1. Platz – NimbRo, Universität Bonn 2. Platz – ToBI, Universität Bielefeld
Smart Manufacturing League Workshop EAI Overal Winner 1. Platz – GM-Force Cologne, TH Köln Workshop EAI Best-in-Class „Warehouse“ 1. Platz – Team robOTTO, Otto-von-Guericke-Universität Magdeburg Workshop EAI Best-in-Class „Assembly“ 1. Platz – GM-Force Cologne, TH Köln
Rescue Robot League 1. Platz – AleRT, MASKOR – Institute for Mobile Autonomous Systems and Cognitive Robotics 2. Platz – Team DYNAMICS, FH OÖ – Campus Wels 3. Platz – AutonOhm Rescue, Technische Hochschule Nürnberg Georg-Simon-Ohm
Rapidly Manufactured Robot Challenge 1. Platz – CJTec, Christoph-Jacob-Treu, Gymnasium Lauf a.d. Pegnitz 2. Platz – Bento Robotics, Wilhelm-Löhe-Schule Nürnberg 3. Platz – CJT Bot Banditen, Christoph-Jacob-Treu Gymnasium Lauf a.d. Pegnitz
Ergebnisse der Junior-Ligen:
OnStage OnStage Entry 1. Platz – rtc gransee – junior, Strittmatter-Gymnasium in Gransee 2. Platz – Die sauren Glühwürmchen, Lessing-Gymnasium Neu-Ulm
OnStage 1. Platz – atheAmadeus, Gymnasium Athenaeum in Stade 2. Platz – rtc gransee – goofy tech, Strittmatter-Gymnasium in Gransee 3. Platz – SquareCodes, Lion-Feuchtwanger-Gymnasium in München
Soccer 1vs1 Entry 1. Platz – Penguins on Wheels, Alexander-von-Humboldt Gymnasium in Berlin 2. Platz – No Name Penguins, Alexander-von-Humboldt Gymnasium in Berlin 3. Platz – LuSi, Schülerforschungszentrum Südwürttemberg e. V. Standort Wangen
1vs1 Lightweight 1. Platz – XBOT, RoCCI e.V. in Senden 2. Platz – Team Alt+F4, Gymnasium Bad Zwischenahn-Edewecht 3. Platz – Bodensee Devils, Gymnasium im Bildungszentrum Markdorf
2vs2 Infrared 1. Platz – Mathimazierer, Lessing-Gymnasium Neu-Ulm 2. Platz – Bodensee Drachen, Gymnasium im Bildungszentrum Markdorf 3. Platz – Bohlebots Pompeii, Gymnasium Haan
2vs2 Vision 1. Platz – Bohlebots Atlantis, Gymnasium Haan 2. Platz – Bodensee Adler, Gymnasium im Bildungszentrum Markdorf 3. Platz – Team Faabs, Lessing-Gymnasium Neu-Ulm
Rescue Simulation 1. Platz – Roger!Roger!, Gymnasium Burgdorf
Line Entry 1. Platz – Brain, Gymnasium Korntal-Münchingen 2. Platz – Leerzeichen, Gymnasium Korntal-Münchingen 3. Platz – Die Steine, Herbartgymnasium Oldenburg
Line 1. Platz – BioBrause, Uni Kassel Workshop 2. Platz – DinA4, Schülerforschungszentrum Südwürttemberg (SFZ) – Stockach 3. Platz – BIGG-IRMI, Schülerforschungszentrum Südwürttemberg e. V. – Wangen
Maze Entry 1. Platz – KaMa Robots, Universität Kassel Workshop 2. Platz – Cyber Knights, Universität Kassel Workshop 3. Platz – Bratnudeln, KGS Rastede
Maze 1. Platz – RRR Kabelmüsli, Schülerforschungszentrum Südwürttemberg (SFZ) – Tuttlingen 2. Platz – Bodensee Dogs, Gymnasium im Bildungszentrum Markdorf 3. Platz – Bodensee Beavers, Gymnasium im Bildungszentrum Markdorf
Parallel zu den RoboCup German Open 2026 fand vom 11. bis 13. März auf der Koelnmesse mit der 2. German Robotics Conference die führende Fachkonferenz zum Thema KI-gestützte Robotik statt, die vom Robotics Institute Germany organisiert wird. Die Konferenz brachte führende Vertreter aus Politik, Wissenschaft, Wirtschaft und Start-ups zusammen, um die Verbindung zwischen Forschung, Innovation und Technologietransfer zu stärken und bot aktuelle Einblicke in die Zukunft der intelligenten Robotik.
In diesem Jahr wurden die RoboCup German Open im Rahmen der didacta 2026 ausgetragen. Als größte und wichtigste Bildungsmesse Europas präsentiert die didacta alle relevanten Bildungsthemen und fördert den Dialog in der Bildungswirtschaft.
Die RoboCup German Open 2026 wurden vom RoboCup-Komitee Deutschland und der Technischen Universität Darmstadt mit Unterstützung durch WorldSkills Germany und im Austausch mit dem Robotics Institute Germany durchgeführt. Die Veranstaltung wird gefördert vom Bundesministerium für Forschung, Technologie und Raumfahrt. Maßgeblich unterstützt wird sie darüber hinaus von der Hans und Ria Messer Stiftung. Des Weiteren unterstützten zahlreiche Partner und Sponsoren die Durchführung der RoboCup German Open 2026, darunter die Gisela und Erwin Sick Stiftung, NetCologne, Maxtronics Robotics SAS und die Micro-Epsilon Messtechnik GmbH & Co. KG.
Roboter, künstliche Intelligenz, Maschinen, die lernen können – das klingt erst einmal ziemlich kompliziert. Genau hier setzt „Roboter und KI“ an. Das Buch zeigt, dass Technik nicht einschüchternd sein muss, sondern neugierig machen kann. Und zwar so, dass Kinder ab etwa 8 Jahren problemlos folgen können – und Erwachsene oft gleich mitlesen.
Schon nach den ersten Seiten wird klar: Hier geht es nicht darum, alles perfekt zu verstehen. Es geht ums Entdecken, Staunen und Fragenstellen. Und genau das macht den Reiz dieses Buches aus.
Was dich im Buch erwartet
Statt streng von vorne nach hinten gelesen zu werden, lädt dieses Buch zum Querlesen ein. Du kannst selbst entscheiden, welches Thema dich gerade interessiert – fast so, als würdest du durch ein Technik-Museum schlendern und an den Stationen stehen bleiben, die dich am meisten ansprechen.
Im Buch geht es unter anderem darum,
was Roboter eigentlich sind und wo sie uns heute schon begegnen
wie künstliche Intelligenz funktioniert – ganz einfach erklärt
warum Roboter im Weltall, in Krankenhäusern oder sogar beim Spielen helfen
wie Maschinen lernen können und was das mit unserem eigenen Lernen zu tun hat
Die Texte sind bewusst kurz gehalten, werden durch Bilder, Infokästen und kleine Zusatzinfos ergänzt und lassen sich auch gut in Etappen lesen. Ideal also für zwischendurch – oder für einen gemütlichen Lesenachmittag.
Warum Leser:innen das Buch mögen
In Rezensionen auf Plattformen wie Thalia, Hugendubel oder Amazon liest man immer wieder, dass das Buch Kinder richtig gut abholt. Besonders positiv fällt auf, dass Technik hier nicht trocken erklärt wird, sondern in kleinen Häppchen, die neugierig machen.
Viele Eltern berichten, dass ihre Kinder selbstständig im Buch stöbern, hin- und herblättern und immer wieder neue Seiten entdecken. Genau dieses freie Lesen motiviert – vor allem Kinder, die bei klassischen Sachbüchern schnell die Lust verlieren.
Auch die Erklärweise wird häufig gelobt. Fachbegriffe werden nicht einfach hingeschrieben, sondern so erklärt, dass man sie wirklich versteht. Oft helfen Vergleiche aus dem Alltag dabei, zum Beispiel aus Spielen, Schule oder dem eigenen Zuhause.
Ein weiterer Pluspunkt ist die Gestaltung: Die Seiten sind farbig, übersichtlich und hochwertig gestaltet. Das Buch fühlt sich stabil an, liegt gut in der Hand und eignet sich auch hervorragend als Geschenk.
Mein Fazit
„Kosmos SchlauFUX – Roboter und KI“ ist ein Buch, das Lust auf Zukunft macht. Es erklärt große Themen verständlich, ohne sie zu vereinfachen, und zeigt, dass Technik nichts Abgehobenes ist, sondern längst zu unserem Alltag gehört.
Besonders schön: Man muss kein Technik-Profi sein, um Spaß an diesem Buch zu haben. Es reicht Neugier – der Rest kommt beim Lesen fast von allein. Ein Buch, das man immer wieder zur Hand nimmt und jedes Mal etwas Neues entdeckt.