Papageitaucher, Möwen und andere Seevögel bewegen sich in zwei sehr unterschiedlichen Welten: Sie fliegen durch die Luft und schwimmen unter Wasser. Forschende haben nun einen kleinen Roboter gebaut, der das ebenfalls kann. Er nutzt dafür in beiden Umgebungen dieselben Flügel.
Entwickelt wurde der Roboter von einem Forschungsteam des Massachusetts Institute of Technology (MIT), der Schweizer Hochschule EPFL und des Northwest Indian College. Seine Bewegungen orientieren sich an echten Tauchvögeln.
Ein Roboter für Luft und Wasser
Der Roboter heißt Flapping-Wing Aerial-Aquatic Vehicle, abgekürzt FAAV. Übersetzt bedeutet das ungefähr „Luft-Wasser-Fahrzeug mit schlagenden Flügeln“.
Er wiegt weniger als 300 Gramm und besteht aus einem schmalen Rumpf, zwei beweglichen Flügeln und einem steuerbaren Schwanz. Im Inneren befinden sich eine Batterie und ein wasserdichter Elektromotor. Der Motor bewegt die Flügel über eine Kurbel auf und ab.
Das Besondere daran: Der Roboter braucht keinen Propeller zum Fliegen und keine Schiffsschraube zum Schwimmen. Er verwendet für beides seine Flügel.
Warum ist das so schwierig?
Wasser ist ungefähr 1.000-mal dichter als Luft. Deshalb lassen sich die Flügel unter Wasser viel schwerer bewegen. Du kannst das leicht ausprobieren: Bewege deine Hand zuerst durch die Luft und danach durch eine gefüllte Badewanne. Im Wasser spürst du deutlich mehr Widerstand.
Die Flügel des Roboters müssen deshalb zwei Aufgaben erfüllen. Unter Wasser sollen sie etwas nachgeben, damit der Widerstand nicht zu groß wird. In der Luft müssen sie zugleich fest genug sein, um den Roboter zu tragen.
Das Team testete Flügel mit Spannweiten von 60, 80 und 100 Zentimetern. Am zuverlässigsten funktionierte der Roboter mit den 80 Zentimeter breiten Flügeln. Ihre dünnen Membranen sind mit wasserabweisenden Nanopartikeln beschichtet. Dadurch bleibt nach dem Auftauchen weniger Wasser an ihnen hängen.
So kommt der Roboter aus dem Wasser
Besonders schwierig ist der Wechsel vom Schwimmen zum Fliegen. Bei den Versuchen startete der Roboter etwa einen halben Meter unter der Wasseroberfläche. Er schwamm nach oben und richtete seinen Körper in einem Winkel von ungefähr 70 Grad aus.
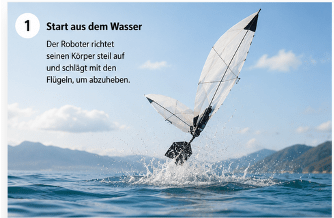

Dieser steile Winkel verhindert, dass die Flügelspitzen beim Start gegen die Wasseroberfläche schlagen. Ist der Winkel noch größer, kann der Roboter nach hinten zurück ins Wasser kippen.
Viele echte Wasservögel paddeln beim Start zusätzlich mit ihren Füßen. Der Roboter besitzt keine solchen Paddelfüße. Trotzdem gelang es ihm, allein mit seinen Flügeln aus dem Wasser zu starten.
Wie schnell ist er?
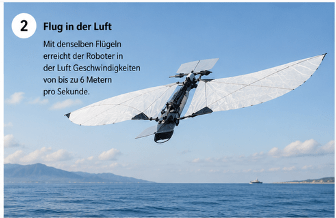
Unter Wasser erreichte der Roboter fast einen Meter pro Sekunde. In der Luft flog er ungefähr sechs Meter pro Sekunde. Das entspricht rund 22 Kilometern pro Stunde.
Sowohl beim Schwimmen als auch beim Fliegen schlug er ungefähr fünfmal pro Sekunde mit den Flügeln. Seine Werte liegen damit in einem ähnlichen Bereich wie bei manchen kleinen Tauchvögeln.
Wofür könnte man ihn einsetzen?
Der Roboter ist bisher ein Forschungsmodell. Später könnten ähnliche Geräte bei der Untersuchung von Meeren, Seen und Küsten helfen.
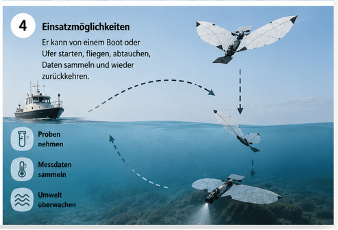
Ein solcher Roboter könnte von einem Boot oder vom Ufer aus starten, zu einer bestimmten Stelle fliegen und dort abtauchen. Unter Wasser könnte er Messwerte sammeln oder Proben nehmen. Danach würde er wieder auftauchen und zurückfliegen.
Denkbare Einsatzorte wären zum Beispiel Eisberge, Häfen oder schwer zugängliche Küstengebiete. Vor einem echten Einsatz müssen die Forschenden den Roboter jedoch noch verbessern. Er soll besser lenken können und auch bei Wind, Wellen und unruhigem Wasser zuverlässig funktionieren.
Fazit
Der FAAV zeigt, wie Forschende Ideen aus der Natur für neue Maschinen nutzen. Seine flexiblen Flügel funktionieren sowohl im Wasser als auch in der Luft. Damit könnte er eines Tages Orte untersuchen, die für Menschen oder größere Fahrzeuge nur schwer erreichbar sind.
Bis dahin sind aber noch weitere Versuche nötig. Vor allem bei schlechtem Wetter und starkem Wellengang muss der kleine Tauchvogel-Roboter erst noch zeigen, was er kann.
FuxFun
Wusstest du, dass kleine Tauchvögel ihre Flügel in der Luft oft ungefähr zehnmal pro Sekunde schlagen, unter Wasser aber nur etwa viermal? Das Forschungsteam wertete Daten verschiedener Vogelarten aus, um passende Bewegungen für den Roboter zu finden.
Für Profis
Die Studie trägt den Titel „Leaping out of the water: aerial-aquatic locomotion with flapping wings“ und wurde im Juli 2026 in der Fachzeitschrift Science veröffentlicht. Auf der MIT-News-Seite sind außerdem Videos und Aufnahmen der Versuche zu sehen.
Quellen
MIT News: „New flapping robot swims and flies like a diving bird“, Jennifer Chu, veröffentlicht am 9. Juli 2026.
Wissenschaftliche Studie: „Leaping out of the water: aerial-aquatic locomotion with flapping wings“, Science, 2026.
Buchempfehlung
Noch mehr über Roboter und künstliche Intelligenz erfährst du im Buch „Roboter & KI“ aus der SchlauFUX-Reihe vom KOSMOS Verlag
Hinweis: Text und Grafiken wurden mit Unterstützung von KI erstellt