Der HP Robots Otto ist ein vielseitiger, modularer Roboter, der speziell für Bildungszwecke entwickelt wurde. Er bietet Schülern und Lehrern eine spannende Möglichkeit, in die Welt der Robotik, 3D-Druck, Elektronik und Programmierung einzutauchen. Der Roboter wurde von HP als Teil ihrer Robotik-Initiative entwickelt und ist besonders für den Einsatz im MINT-Unterricht (Mathematik, Informatik, Naturwissenschaften und Technik) geeignet.
Hauptmerkmale von Otto:
- Modularer Aufbau: Otto ist ein modularer Roboter, der es Schülern ermöglicht, ihn zu bauen, zu programmieren und durch Erweiterungen individuell anzupassen. Dies fördert das Verständnis für Technik und Kreativität. Die modulare Struktur erlaubt es, verschiedene Komponenten wie Motoren, Sensoren und LEDs hinzuzufügen oder zu ersetzen, was die Lernkurve für Schüler erweitert.
- Programmierbarkeit: Der Roboter kann mit verschiedenen Programmiersprachen programmiert werden, darunter blockbasierte Programmierung für Anfänger sowie Python und C++ für Fortgeschrittene. Diese Vielfalt ermöglicht es Schülern, ihre Programmierfähigkeiten kontinuierlich zu verbessern und sich an die Komplexität der Aufgaben anzupassen.
- Sensoren und Funktionen: Ausgestattet mit Ultraschallsensoren zur Hinderniserkennung, Linienverfolgungssensoren und RGB-LEDs bietet Otto zahlreiche interaktive Möglichkeiten. Diese Funktionen ermöglichen es Schülern, komplexe Aufgaben wie das Navigieren durch Parcours oder das Verfolgen von Linien zu programmieren. Die Sensoren helfen dabei, die Umgebung zu erkennen und entsprechend zu reagieren.
- 3D-Druck und Anpassbarkeit: Schüler können Ottos äußere Teile selbst entwerfen und mit einem 3D-Drucker herstellen. Dies ermöglicht eine weitere Personalisierung und Anpassung des Roboters. Diese Kreativfreiheit fördert nicht nur technisches Verständnis, sondern auch künstlerische Fähigkeiten. Eigene Teile können entworfen und Sensoren an gewünschten Stellen angebracht werden.
Bildungsansatz:
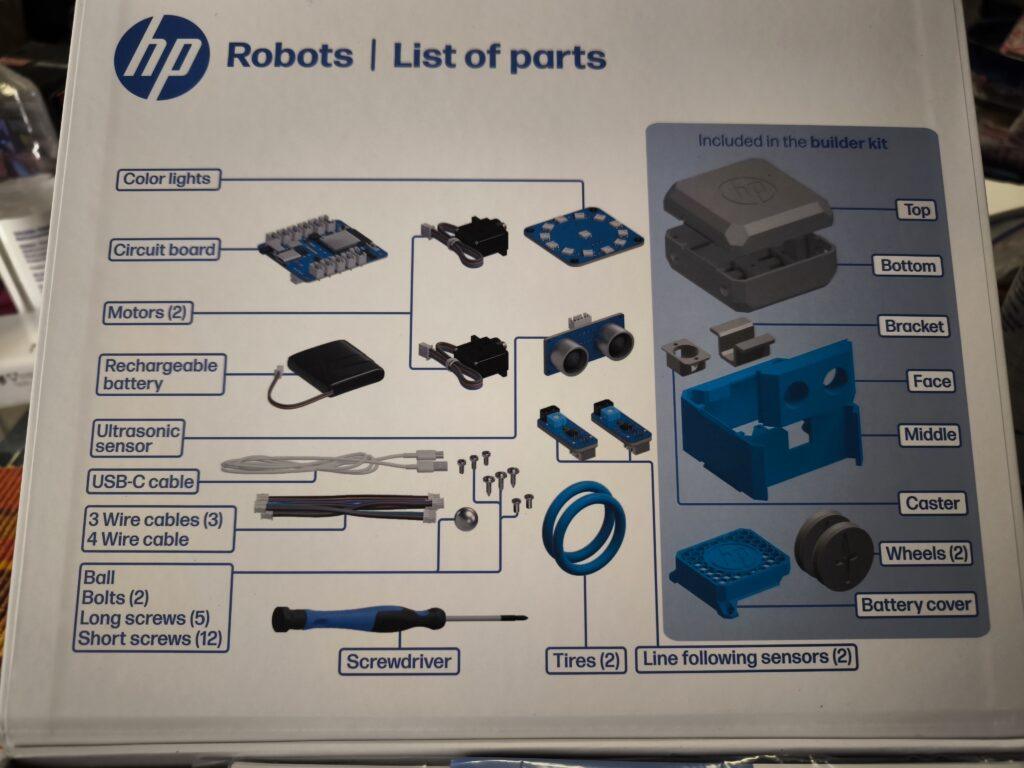
Otto ist ideal für den Einsatz in Schulen gedacht und richtet sich an Schüler ab 8 Jahren. Jüngere Schüler können unter Aufsicht arbeiten, während ältere Schüler ab 14 Jahren den Roboter auch eigenständig nutzen und erweitern können. Das Kit enthält alle notwendigen Komponenten, um einen funktionierenden Roboter zu bauen, einschließlich Motoren, Sensoren und einer wiederaufladbaren Batterie.
Programmierumgebungen:
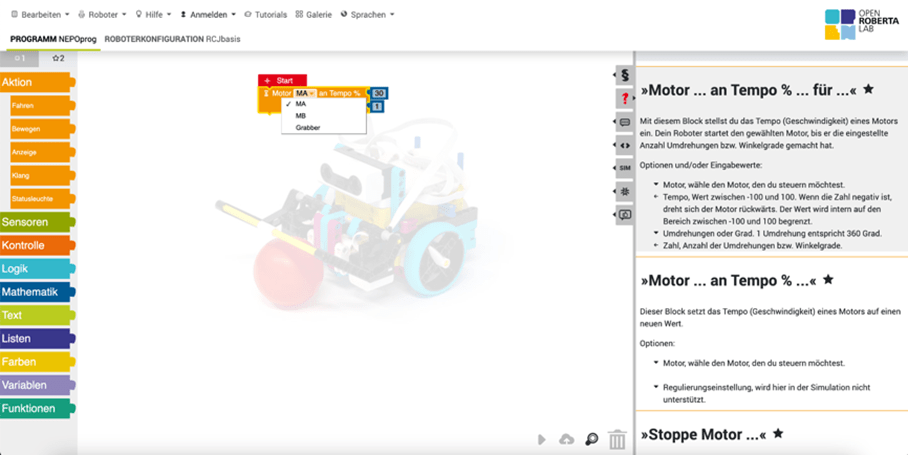
Die Programmierung von Otto erfolgt über eine webbasierte Plattform, die auf allen Betriebssystemen läuft. Diese Plattform bietet verschiedene Modi:
- Blockbasierte Programmierung: Ähnlich wie Scratch Jr., ideal für Anfänger. Diese visuelle Programmierung erleichtert den Einstieg in die Welt der Programmierung und hilft Schülern, grundlegende Konzepte wie Schleifen und Bedingungen zu verstehen.
- Python: Für fortgeschrittene Benutzer steht ein Python-Editor zur Verfügung. Python ist eine beliebte Sprache, die sich gut für den Unterricht eignet, da sie einfach zu lesen und zu schreiben ist. Schüler können mit Python komplexere Algorithmen entwickeln und ihre Fähigkeiten im Bereich der Programmierung erweitern.
- C++: Kompatibel mit der Arduino IDE für Nutzer, die tiefere Programmierkenntnisse haben. C++ bietet eine hohe Flexibilität und ermöglicht es Schülern, direkt auf die Hardware zuzugreifen, was eigene fortgeschrittene Projekte ermöglicht.
Expansion/Erweiterungs Kits:
Zusätzlich zum Starter Kit gibt es mehrere Erweiterungskits. Alle Erweiterungskits setzen das Starter-Kit voraus, da sie auf dessen Basis aufgebaut werden.
Emote Expansion Kit:
- Es enthält Komponenten wie ein LED-Matrix-Display, OLED Display und einen MP3-Player, die es dem Roboter ermöglichen, visuelle und akustische Reaktionen darzustellen.
- Dieses Kit eignet sich besonders für kreative Projekte, bei denen Otto als interaktiver Begleiter fungieren soll.
- Das Emote-Kit ermöglicht es Otto, Emotionen zu zeigen, menschliche Interaktionen zu spiegeln und verschiedene Persönlichkeiten zu entwickeln.
Sense Expansion Kit:
- Mit dem Sense-Kit kann Otto seine Umgebung durch verschiedene Sensoren wahrnehmen.
- Enthalten sind Sensoren für Temperatur, Luftfeuchtigkeit, Licht und Geräusche sowie ein Neigungssensor. Diese ermöglichen vielfältige Interaktionen mit der Umwelt.
- Das Kit ist ideal für Projekte, die sich auf Umwelterkennung und Datenanalyse konzentrieren.
Interact Expansion Kit:
- Das Interact-Kit erweitert Ottos Fähigkeit zur taktilen Interaktion durch Module wie Drucktasten, Drehknöpfe und Beschleunigungsmesser.
- Es ermöglicht präzise Eingaben und Reaktionen sowie Messung der Beschleunigung.
- Dieses Kit eignet sich hervorragend für spielerische Aktivitäten und interaktive Spiele.
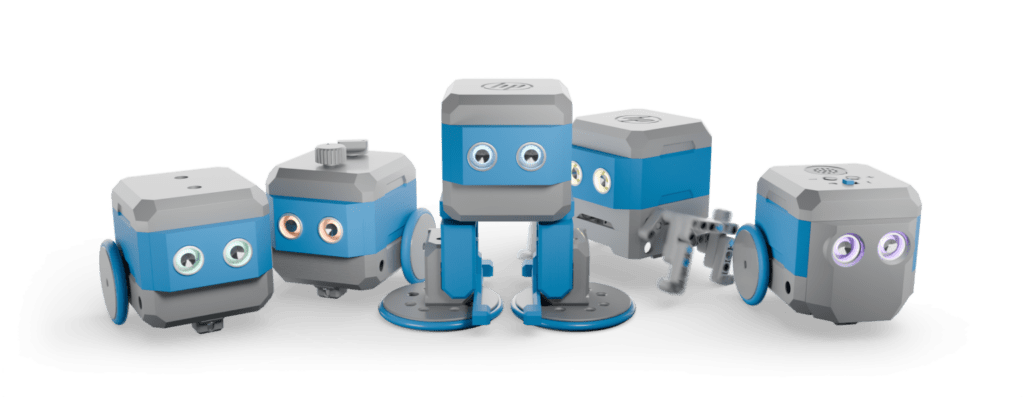
Invent Expansion Kit:
- Das Invent-Kit ist speziell darauf ausgelegt, die Kreativität der Benutzer zu fördern. Es erlaubt die individuelle Anpassung von Ottos Funktionalitäten und Design durch 3D-Druck und zusätzliche Module sowie kompatible Klemmbausteine.
- Benutzer können neue Zubehörteile entwerfen und drucken, um den Roboter einzigartig zu machen.
- Statte Otto mit Beinen aus und bring ihm das Laufen bei oder mache ihn mit Ketten fit für den Outdoor Einsatz im Gelände.

Einsatz im Unterricht:
Otto wird mit umfangreichen Ressourcen geliefert, die von Lehrern entwickelt wurden. Diese Materialien unterstützen Lehrer dabei, einen effektiven MINT-Unterricht zu gestalten, ohne dass Vorkenntnisse erforderlich sind. Der Roboter kann sowohl im Klassenraum als auch zu Hause eingesetzt werden. Die didaktischen Materialien umfassen:
- Lehrpläne: Strukturierte Unterrichtspläne, die den Lehrern helfen, den Unterricht zu planen und durchzuführen.
- Projektideen und Arbeitsblätter: Eine Vielzahl von Projekten, die Schüler dazu anregen, kreativ zu denken und ihre Fähigkeiten zu erweitern.
- Tutorials und Videos: Zusätzliche Lernmaterialien, die Schülern helfen, komplexe Konzepte besser zu verstehen.
Fazit:
Der HP Robots Otto ist ein hervorragendes Werkzeug zur Förderung von technischem Verständnis und Kreativität bei Schülern. Durch seine modulare Bauweise und die vielfältigen Programmiermöglichkeiten bietet er eine praxisorientierte Lernerfahrung im Bereich der Robotik und Elektronik. Otto ist ideal für den Einsatz in Schulen und bietet Lehrern eine umfassende Plattform, um Schüler auf eine spannende Reise in die Welt der Technologie zu begleiten. Besonders Ottos Vielseitigkeit durch die 3D-gedruckten Teile und Erweiterungspakete bieten die Möglichkeit, den persönlichen Lernroboter zu bauen.