20.03.2023, St-Sulpice, Switzerland: MasterMover, the world’s leading manufacturer of electric tug and tow solutions, has announced a new partnership with vehicle automation leader BlueBotics to provide best-in-class ANT navigation technologies for MasterMover’s range of Automated Guided Vehicles.
Known for its broad portfolio of pedestrian operated electric tugs and electric tows, used across Industrial Manufacturing, Logistics, and Retail, MasterMover also offers a range of advanced solutions, spanning remote control operation, line follow navigation, and fully autonomous solutions.
MasterMover AGV products now include BlueBotics’ ANT natural navigation technology as standard, ensuring customers benefit from the advanced features and functionality available from the vehicle navigation market leader.
“MasterMover has twenty-five -years’ experience in designing, manufacturing, and delivering load moving solutions that are synonymous with reliability, quality, and performance,” commented James Jones, Partner and Director at MasterMover. “We are combining this expertise with world-class technology partners to deliver advanced solutions. These are increasingly being demanded by our customers who are focused on maximising safety and efficiency within their operations.”
BlueBotics is the global reference in natural feature navigation. For over 20 years, the Swiss company has helped companies meet the challenge of vehicle automation, and today there are more than 4,000 ‘ANT driven’ AGVs, automated forklifts, and AMRs in operation around the world.
“At BlueBotics our goal is to work with market-leading vehicle producers who have the expertise and experience needed to fully meet their customers’ AGV needs,” said Dr. Nicola Tomatis, CEO of BlueBotics. “Partnering with MasterMover is a great example of this. We have been continually impressed with the professionalism of both the company’s solutions and its team, and we look forward to enjoying much success together.”
MasterMover AGV solutions offer Industrial Manufacturing organisations an effective way to automate a range of load moving processes, delivering return-on-investment, and driving operational efficiency.
Autonomous solutions are available from MasterMover with the capacity to move up to 30,000kg, meaning the company is equipped to take on a wide range of load movement challenges with advanced solutions.
MasterMover is combining a strong track record of success in building powerful and reliable load moving products, with best-in-class technologies from market leaders such as BlueBotics. The company also works with safety technology specialists SICK for its AGV solutions.
“Partnering with BlueBotics was a natural choice, with their ANT navigation technology leading the way. The advanced capabilities of BlueBotics’ solutions, as well as their focus on innovation, mean they are the ideal navigation partner for MasterMover,” added Jones. “We have worked closely with the BlueBotics team on a number of projects, and the relationship between the two organisations will only go from strength to strength”.
For more information on MasterMover AGV solutions, please visit:
MasterMover is a world-leading manufacturer of electric tug and tow solutions, designed to improve safety and operational efficiency when moving heavy, large or unconventional loads. MasterMover focuses on innovation, research, and development to provide the widest range of electric tug products on the market.
Specialist solutions include pedestrian-operated, remotely controlled, and fully Automated Guided Vehicle (AGV) options. In addition, MultiLink technology allows a single remote operator to simultaneously control multiple electric tugs through synchronised movement.
MasterMover operates globally through direct relationships and a network of sales and service partners. The company works with an enviable range of world-leading names across industrial manufacturing, retail, and logistics. With an expert in-house engineering team, MasterMover has a proven track record of delivering bespoke projects for diverse applications around the world.
About BlueBotics
BlueBotics is the reference in natural feature navigation and has the mission to help companies meet the challenge of vehicle automation. With over 20 years of industry experience, the company provides the autonomous navigation technology (ANT) and expert support customers need to bring their AGV, automated forklift, or mobile robot successfully to market. Today, there are more than 4,000 ANT driven vehicles in operation worldwide. Visit www.bluebotics.com to learn more.
Waldkirch, Februar 2023 – SICK launcht den kompakten und präzisen 3D-LiDar-Sensor multiScan100. Damit unterstützt das Unternehmen die Entwicklung autonomer industrieller Fahrzeuge im Innen- und Außenbereich und verstärkt den Fokus auf digitale Softwarelösungen, um einen zusätzlichen Kundennutzen über die reinen Messdaten hinaus anzubieten.
Auf der letzten SPS in Nürnberg konnten die Besucher schon einen ersten Blick auf die neue multiScan100 Produktfamilie werfen, welche als eine Lösung für die Konturnavigation von industriellen Fahrzeugen ausgestellt wurde. Mit der ersten Variante, dem multiScan136, können mobile Plattformen wie AGVs oder Serviceroboter eigenständig eine neue Umgebung erkunden und davon eine Karte erstellen, die im Produktivbetrieb zur Navigation und Lokalisierung genutzt werden kann. Der LiDAR Sensor liefert 3D-Messdaten in Kombination einer hochauflösenden 0° Scanlage, die für eine präzise Selbstlokalisierung der autonomen Fahrzeuge bei gleichzeitiger Kartierung der Umgebung (SLAM, für Simultaneous Localization and Mapping) verwendet werden können. Darüber hinaus lassen sich durch die 3D-Punktewolke Absturzkanten oder Hindernisse erkennen.
Der 3D-LiDAR-Sensor multiScan136 mit 360° Rundumblick erreicht Dank der bis zu 690.000 Messpunkte eine State-of-the-Art Präzision, der nichts in seinem Umfeld entgeht. Mit seiner kompakten Bauform von circa 10 cm und industrieller Schnittstellen ist eine hohe Integrationsfreundlichkeit gewährleistet. Der Sensor lässt sich durch sein robustes Design und einer IP-Schutzklasse von bis zu 69k in rauen Umgebungen einsetzen. Durch die bewährte Multi-Echo-Technologie und seinem statistischen Messverfahren ist auch unter schlechten Bedingungen im Außenbereich eine präzise Umgebungserfassung sichergestellt. Somit ist der multiScan136 danke einer hohen Messgenauigkeit und einem geringen Messwertrauschen nicht nur für eine präzise Feinpositionierung im Innenbereich einsetzbar, sondern auch mühelos für die Umgebungserfassung im Außenbereich. Mit dem großen vertikalen Öffnungswinkel von 65° entgeht ihm dabei nichts, wodurch sich Kollisionen im Einsatz mobiler Outdoor Automation vermeiden lassen. Neben mobilen Anwendungen lässt sich der Sensor durch sein großes Sichtfeld auch für stationäre Anwendung im Objektschutz für Building Security (Objektsicherheit), Traffic (Verkehr) oder Smart City Applikationen wie Personenstromerfassung einsetzten.
Mit dem multiScan136 macht SICK einen weiteren Schritt in Richtung 3D-LiDAR Technologie und verstärkt den Fokus auf digitale Softwarelösungen, um einen zusätzlichen Kundennutzen über die reinen Messdaten hinaus anzubieten. Somit sind die präzisen Messdaten nur der erste Schritt für weitere Funktionen, die sich ohne weitere Recheneinheit direkt auf dem Sensor auswerten lassen.
Unitree Quadruped Go 1 Dance Video 1+2. Find the latest News on robots, drones, AI, robotic toys and gadgets at robots-blog.com. If you want to see your product featured on our Blog, Instagram, Facebook, Twitter or our other sites, contact us. #robots #robot #omgrobots #roboter #robotic #automation #mycollection #collector #robotsblog #collection #botsofinstagram #bot #robotics #robotik #gadget #gadgets #toy #toys #drone #robotsofinstagram #instabots #photooftheday #picoftheday #followforfollow #instadaily #werbung #unitree #quadruped #robotics #mybotshop #dog #dance @mybotshop @unitreerobotics
Communication & Safety Challenges Facing Mobile Robots Manufacturers
Mobile robots are everywhere, from warehouses to hospitals and even on the street. Their popularity is easy to understand; they’re cheaper, safer, easier to find, and more productive than actual workers. They’re easy to scale or combine with other machines. As mobile robots collect a lot of real-time data, companies can use mobile robots to start their IIoT journey.
But to work efficiently, mobile robots need safe and reliable communication. This article outlines the main communication and safety challenges facing mobile robot manufacturers and provides an easy way to overcome these challenges to keep mobile robots moving.
What are Mobile Robots?
Before we begin, let’s define what we mean by mobile robots.
Mobile robots transport materials from one location to another and come in two types, automated guided vehicles (AGVs) and autonomous mobile robots (AMRs). AGVs use guiding infrastructure (wires reflectors, reflectors, or magnetic strips) to follow predetermined routes. If an object blocks an AGV’s path, the AGV stops and waits until the object is removed.
AMRs are more dynamic. They navigate via maps and use data from cameras, built-in sensors, or laser scanners to detect their surroundings and choose the most efficient route. If an object blocks an AMR’s planned route, it selects another route. As AMRs are not reliant on guiding infrastructure, they’re quicker to install and can adapt to logistical changes.
What are the Communication and Safety Challenges Facing Mobile Robot Manufacturers?
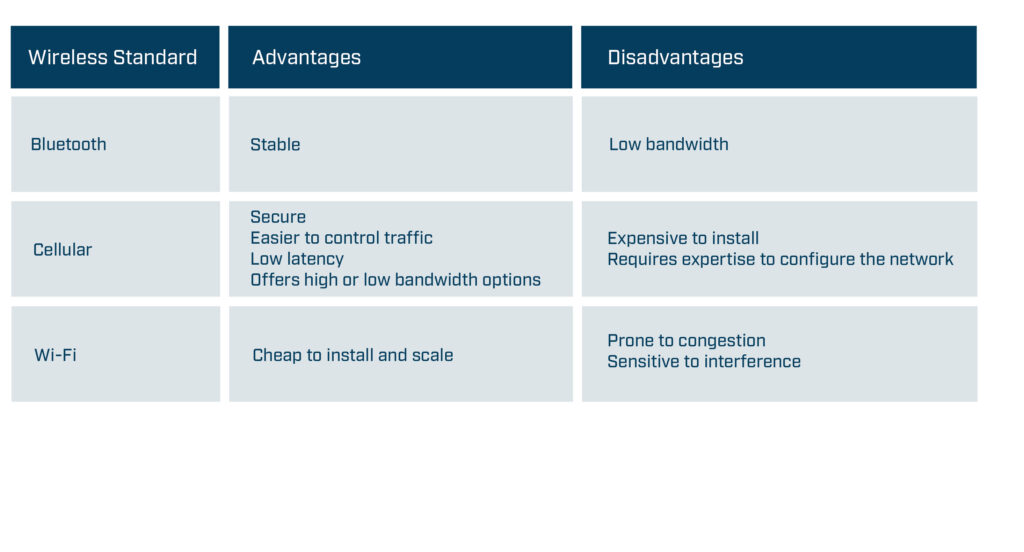
1. Establish a Wireless Connection The first challenge for mobile robot manufacturers is to select the most suitable wireless technology. The usual advice is to establish the requirements, evaluate the standards, and choose the best match. Unfortunately, this isn’t always possible for mobile robot manufacturers as often they don’t know where the machine will be located or the exact details of the target application.
Sometimes a Bluetooth connection will be ideal as it offers a stable non-congested connection, while other applications will require a high-speed, secure cellular connection. What would be useful for mobile robot manufacturers is to have a networking technology that’s easy to change to meet specific requirements.
Figure 1. Wireless standard -high-level advantages and disadvantages
The second challenge is to ensure that the installation works as planned. Before installing a wireless solution, complete a predictive site survey based on facility drawings to ensure the mobile robots have sufficient signal coverage throughout the location. The site survey should identify the optimal location for the Access Points, the correct antenna type, the optimal antenna angle, and how to mitigate interference. After the installation, use wireless sniffer tools to check the design and adjust APs or antenna as required.
2. Connecting Mobile Robots to Industrial Networks
Mobile robots need to communicate with controllers at the relevant site even though the mobile robots and controllers are often using different industrial protocols. For example, an AGV might use CANopen while the controller might use PROFINET. Furthermore, mobile robot manufacturers may want to use the same AGV model on a different site where the controller uses another industrial network, such as EtherCAT.
Mobile robot manufacturers also need to ensure that their mobile robots have sufficient capacity to process the required amount of data. The required amount of data will vary depending on the size and type of installation. Large installations may use more data as the routing algorithms need to cover a larger area, more vehicles, and more potential routes. Navigation systems such as vision navigation process images and therefore require more processing power than installations using other navigation systems such as reflectors. As a result, mobile robot manufacturers must solve the following challenges:
They need a networking technology that supports all major fieldbus and industrial Ethernet networks.
It needs to be easy to change the networking technology to enable the mobile robot to communicate on the same industrial network as the controller without changing the hardware design.
They need to ensure that the networking technology has sufficient capacity and functionality to process the required data.
3. Creating a Safe System
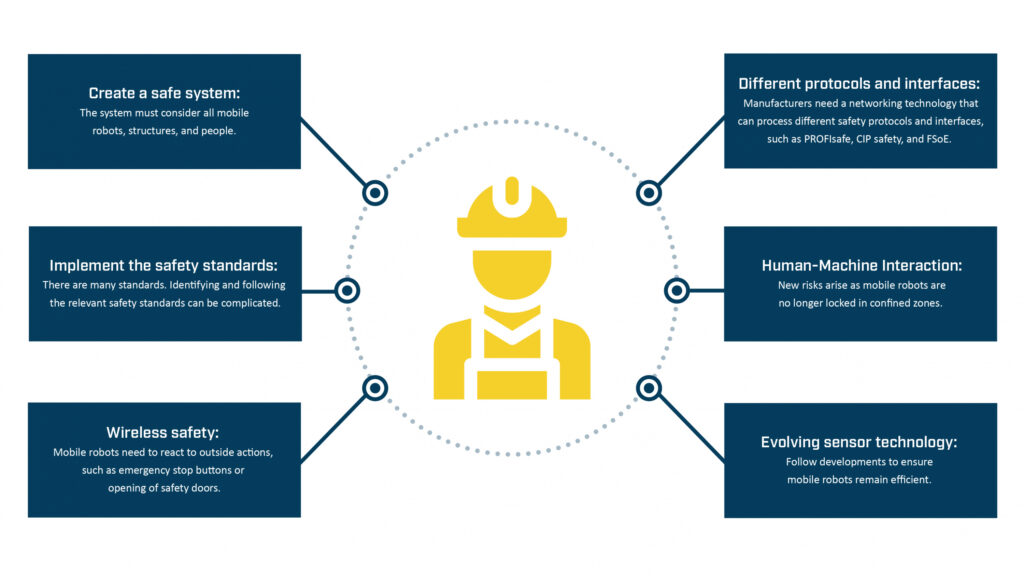
Creating a system where mobile robots can safely transport material is a critical but challenging task. Mobile robot manufacturers need to create a system that considers all the diverse types of mobile robots, structures, and people in the environment. They need to ensure that the mobile robots react to outside actions, such as someone opening a safety door or pushing an emergency stop button, and that the networking solution can process different safety protocols and interfaces. They need to consider that AMRs move freely and manage the risk of collisions accordingly. The technology used in sensors is constantly evolving, and mobile robot manufacturers need to follow the developments to ensure their products remain as efficient as possible.
Figure 2. Overview of Safety Challenges for Mobile Robot Manufacturers
Safety Standards
The safety standards provide guidelines on implementing safety-related components, preparing the environment, and maintaining machines or equipment.
While compliance with the different safety standards (ISO, DIN, IEC, ANSI, etc.) is mostly voluntary, machine builders in the European Union are legally required to follow the safety standards in the machinery directives. Machinery directive 2006/42/EC is always applicable for mobile robot manufacturers, and in some applications, directive 2014/30/EU might also be relevant as it regulates the electromagnetic compatibility of equipment. Machinery directive 2006/42/EC describes the requirements for the design and construction of safe machines introduced into the European market. Manufacturers can only affix a CE label and deliver the machine to their customers if they can prove in the declaration of conformity that they have fulfilled the directive’s requirements.
Although the other safety standards are not mandatory, manufacturers should still follow them as they help to fulfill the requirements in machinery directive 2006/42/EC. For example, manufacturers can follow the guidance in ISO 12100 to reduce identified risks to an acceptable residual risk. They can use ISO 13849 or IEC 62061 to find the required safety level for each risk and ensure that the corresponding safety-related function meets the defined requirements. Mobile robot manufacturers decide how they achieve a certain safety level. For example, they can decrease the speed of the mobile robot to lower the risk of collisions and severity of injuries to an acceptable level. Or they can ensure that mobile robots only operate in separated zones where human access is prohibited (defined as confined zones in ISO 3691-4). Identifying the correct standards and implementing the requirements is the best way mobile manufacturers can create a safe system. But as this summary suggests, it’s a complicated and time-consuming process.
4. Ensuring a Reliable CAN Communication A reliable and easy-to-implement standard since the 1980s, communication-based on CAN technology is still growing in popularity, mainly due to its use in various booming industries, such as E-Mobility and Battery Energy Storage Systems (BESS). CAN is simple, energy and cost-efficient. All the devices on the network can access all the information, and it’s an open standard, meaning that users can adapt and extend the messages to meet their needs. For mobile robot manufacturers, establishing a CAN connection is becoming even more vital as it enables them to monitor the lithium-ion batteries increasingly used in mobile robot drive systems, either in retrofit systems or in new installations. Mobile robot manufacturers need to do the following:
1.Establish a reliable connection to the CAN or CANopen communication standards to enable them to check their devices, such as monitoring the battery’s status and performance.
2. Protect systems from electromagnetic interference (EMI), as EMI can destroy a system’s electronics. The risk of EMI is significant in retrofits as adding new components, such as batteries next to the communication cable, results in the introduction of high-frequency electromagnetic disturbances.
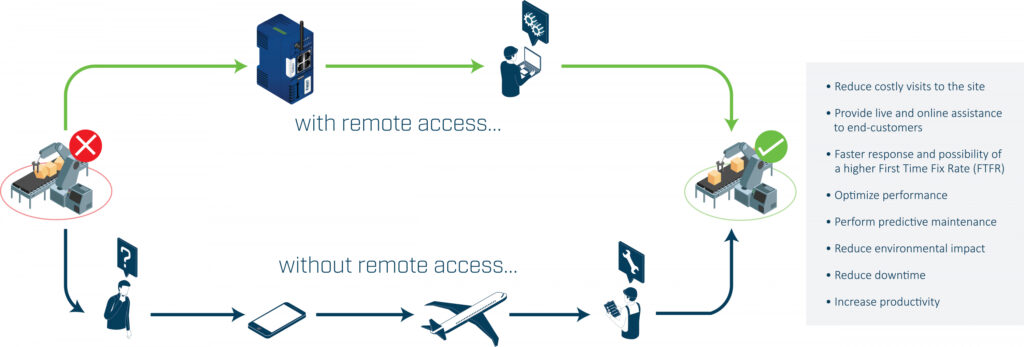
5. Accessing Mobile Robots Remotely The ability to remotely access a machine’s control system can enable mobile robot vendors or engineers to troubleshoot and resolve most problems without traveling to the site.
Figure 3. Benefits of Remote Access
The challenge is to create a remote access solution that balances the needs of the IT department with the needs of the engineer or vendor.
The IT department wants to ensure that the network remains secure, reliable, and retains integrity. As a result, the remote access solution should include the following security measures:
Use outbound connections rather than inbound connections to keep the impact on the firewall to a minimum.
Separate the relevant traffic from the rest of the network.
Encrypt and protect all traffic to ensure its confidentiality and integrity.
Ensure that vendors work in line with or are certified to relevant security standards such as ISO 27001
Ensure that suppliers complete regular security audits.
The engineer or vendor wants an easy-to-use and dependable system. It should be easy for users to connect to the mobile robots and access the required information. If the installation might change, it should be easy to scale the number of robots as required. If the mobile robots are in a different country from the vendors or engineers, the networking infrastructure must have sufficient coverage and redundancy to guarantee availability worldwide.
Conclusion As we’ve seen, mobile robot manufacturers must solve many communication and safety challenges. They must establish a wireless connection, send data over different networks, ensure safety, connect to CAN systems, and securely access the robots remotely. And to make it more complicated, each installation must be re-assessed and adapted to meet the on-site requirements.
Best practice to implement mobile robot communication Mobile robot manufacturers are rarely communication or safety experts. Subsequently, they can find it time-consuming and expensive to try and develop the required communication technology in-house. Enlisting purpose-built third-party communication solutions not only solves the communication challenges at hand, it also provides other benefits.
Modern communication solutions have a modular design enabling mobile robot manufacturers to remove one networking product designed for one standard or protocol and replace it with a product designed for a different standard or protocol without impacting any other part of the machine. For example, Bluetooth may be the most suitable wireless standard in one installation, while Wi-Fi may provide better coverage in another installation. Similarly, one site may use the PROFINET and PROFIsafe protocols, while another may use different industrial and safety protocols. In both scenarios, mobile robot manufacturers can use communication products to change the networking technology to meet the local requirements without making any changes to the hardware design.
Authors:
Mark Crossley, Daniel Heinzler, Fredrik Brynolf, Thomas Carlsson
HMS Networks
HMS Networks is an industrial communication expert based in Sweden, providing several solutions for AGV communication. Read more on www.hms-networks.com/agv
AGILOX expands its product portfolio with an intelligent dolly mover
With the new AGILOX ODM, the AMR manufacturer is targeting a completely new area of application: the transport of small load carriers.
After AGILOX ONE and AGILOX OCF, now comes AGILOX ODM. The company, which specializes in logistics robots, is adding an autonomous dolly mover to its range of intelligent transport systems controlled by swarm intelligence. AGILOX is thus targeting a completely new area of application: the transport of small load carriers.
AGILOX is expanding its range of Autonomous Mobile Robots (AMRs) with the new Omnidirectional Dolly Mover AGILOX ODM. While the AGILOX ONE is equipped with a scissor lift and the AGILOX OCF has a free lift for load handling, the AGILOX ODM is built on the principle of a dolly mover. This means it can accept loads with a maximum weight of 300 kg to a maximum lifting height of 250 mm and transport them to their destination. The intelligent AMR concept with AGILOX X-SWARM technology thus opens up new areas of application and other industry segments because small load carriers (such as totes), which the new AGILOX ODM is designed to transport, are widely used, especially in the electronics and pharmaceutical industries.
Details of the new AGILOX ODM With the AGILOX ODM, AGILOX has brought new thinking to the concept of Automated Guided Vehicles: The compact vehicle travels autonomously and navigates freely on the production floor or in the warehouse, perfectly ensuring the in-house material flow. Just like AGILOX ONE and AGILOX OCF, AGILOX ODM uses an omnidirectional drive concept. This allows it to travel transversely into rack aisles as well as turn on the spot, enabling it to maneuver even in the tightest of spaces. The lithium iron phosphate (LiFePO4) accumulator ensures short charge times and long operating cycles.
“AGILOX is a brand that has built a strong foundation with the AGILOX ONE and the AGILOX OCF. With the new AGILOX ODM, we remain true to our brand DNA while simultaneously targeting the transport of small load carriers to support our growth plan to become the world’s leading AMR provider,” says Georg Kirchmayr, CEO of AGILOX Services GmbH.
The AGILOX advantage With the new AGILOX ODM, customers can benefit from all the advantages of same proven X-SWARM technology as in AGILOX ONE and AGILOX OCF: the unique advantages of an (intra-)logistics solution designed from the ground up.
Since AGILOX AMRs have no need for a central control system and can orient to the existing contours with millimeter precision, this eliminates time-consuming and costly modifications to the existing infrastructure. Autonomous route-finding also enables the vehicles to avoid obstacles unaided. If it is not possible to get past the detected obstacle due its size or the available clearance, the AMRs calculate a new route within seconds to reach their destination as quickly as possible. For customers, this means maximum freedom in their existing processes, because they do not have to adapt to the Autonomous Mobile Robot system. Instead, the system adapts to the customer’s processes. Furthermore, fully autonomous routing ensures a safe workflow – even in mixed operations.
Plug & Perform commissioning of the intelligent intralogistics solutions and the absence of a master computer or navigation aids also saves AGILOX customers from doing tedious alteration work in advance. Once the logistics robots have been put into operation, they organize themselves according to the (decentralized) principle of swarm intelligence, i.e. they exchange information several times a second to enable the entire fleet to calculate the most efficient route and prevent potential deadlocks before these can occur. The customer thus benefits from a system that constantly runs smoothly, with no downtime. Time-consuming coordination of vehicles by the customer is also a thing of the past thanks to AGILOX X-SWARM technology. For the customer, this means flexibility, because it lets them expand the vehicles‘ area of operation within just a few minutes. It also means that it is very easy to relocate an AGILOX AMR to be used temporarily in other areas of the company areas or its subsidiaries. Since AGILOX vehicles can also communicate with other machines or the building infrastructure by means of IO boxes, even rolling doors or multiple floors are no problem for the AMRs. So, this too means that customers enjoy maximum flexibility in the organization of their production processes.
Another major advantage comes from mixed operation of the AGILOX fleet in a “swarm”. The smaller AGILOX ONE and ODM series vehicles can then, for example, feed the assembly workstations or e-Kanban racks, while the AGILOX OCF vehicles transport the pallets. This can easily be done because AGILOX AMRs all use the same control and WiFi infrastructure.
Kivnon will be presenting its most advanced and safest AGV/AMR Forklift at the event
21 September 2022, Barcelona: Kivnon, an international group specializing in automation and mobile robotics, is attending Logistics & Automation in Spain and will be showcasing it’s safe and versatile K55 AGV/AMR Forklift Pallet Stacker. Putting the emphasis on forklift safety, Kivnon K55 is equipped with advanced safety features to guarantee safe operations as it collaborates, moves, and reacts in a facility.
The Kivnon K55 is designed to move and stack palletized loads at low heights and performs cyclic or conditioned routes while interacting with other AGVs/AMRs, machines, systems, and people, making it a highly effective and safe solution. The model incorporates safety scanners that allow the vehicle to ensure 360-degree safety and operate seamlessly in shared spaces. The fork sensors help assess the possibility of correct loading or unloading of the pallet, keeping the transported goods safe.
Thierry Delmas, Managing Director at Kivnon, says, “AGVs/AMRs are revolutionizing internal logistics. The rising forklift safety challenge is of deep concern, and with the K55 we have taken a step forward to address the global issue. The Kivnon range is designed to ensure safe and reliable operations and to optimize operational efficiency.“
During the event, which runs from 26 – 27 October at IFEMA, Madrid, Kivnon will demonstrate the capabilities of the K55 Pallet Stacker. The vehicle can autonomously transport palletized loads of up 1,000 kg and lift them to heights of up to 1 meter. The vehicle is capable of performing cyclical or conditional circuits and interacting with other AGVs/AMRs, machines, and systems. Highly adaptable, the K55 is perfect for any open-bottom or euro-pallet storage application, receipt and dispatch of goods, and internal material transport. Its use will optimize safety, storage space, and process efficiency.
A robust industrial product, the K55 provides the reliability required to ensure continuity of production process and flexibility to adapt to specific application needs, with an online battery charging system that can function 24/7 with opportunity charges.
Delmas continues, “The Logistics and Automation show is an important networking event where customers can learn about the latest technologies and innovations. We pride ourselves on innovation and are excited to have this opportunity to showcase the capabilities of our products. In addition to the K55, our robust portfolio also includes twister units, car and heavy load tractors, low-height vehicles, and cart pullers, meeting multiple application needs”
The efficiency and precision of Kivnon AGVs/AMRs will be on display and Kivnon robotics experts will be available throughout the show to answer questions and arrange consultations at booth #3F43.
Kivnon offers a wide range of autonomous vehicles (AGVs/AMRs) and accessories for transporting goods, using magnetic navigation or mapping technologies that adapt to any environment and industry. The company offers an integrated solution with a wide range of mobile robotics solutions automating different applications within the automotive, food and beverage, logistics and warehousing, manufacturing, and aeronautics industries.
Kivnon products are characterized by their robustness, safety, precision, and high quality. A user-friendly design philosophy creates a pleasant, simple to install, and intuitive work experience.
Learn more about Kivnon mobile robots (AGVs/AMRs) here.
Apptronik, an Austin-based company specializing in the development of versatile, mobile robotic systems, is announcing a partnership with NASA to accelerate commercialization of its new humanoid robot. The robot, called Apollo, will be one of the first humanoids available to the commercial markets.
At Apptronik’s headquarters in Austin, Texas, the first prototype of Apollo is now complete, with the expectation of broader commercial availability in 2023. Unlike special-purpose robots that are only capable of a single, repetitive task, Apollo is designed as a general-purpose robot capable of doing a wide range of tasks in dynamic environments. Apollo will benefit workers in industries ranging from logistics, retail, hospitality, aerospace and beyond.
NASA is known across the globe for its contributions to the advancement of robotics technology. NASA first partnered with Apptronik in 2013 during the DARPA Robotics Challenge (DRC), where founders were selected to work on NASA’s Valkyrie Robot. The government agency has now selected Apptronik as a commercial partner to launch a new generation of general-purpose robots, starting with Apollo.
“Continued investment from NASA validates the work we are doing at Apptronik and the inflection point we have reached in robotics. The robots we’ve all dreamed about are now here and ready to get out into the world,” said Jeff Cardenas, CEO and co-founder of Apptronik. “These robots will first become tools for us here on Earth, and will ultimately help us move beyond and explore the stars.”
In addition to its work with NASA, Apptronik’s team has partnered with leading automotive OEMs, major transportation and logistics companies, and government agencies. Boasting notable names including Dr. Nicholas Paine, Co-founder and Chief Technology Officer of Apptronik and Dr. Luis Sentis, Co-Founder and Scientific Advisor, its team is respected as among the best in the world. A growing hub for robotics, the Austin-based company continues to recruit top talent looking to bring their innovations to market now.
Apptronik is recognized for its emphasis on human-centered design, building beautifully designed and user-friendly robotic systems. As part of this commitment, it selected premier design firm argodesign as its partner in designing Apollo with the goal of creating robots capable of working alongside humans in our most critical industries. The team’s focus now is to scale Apollo so that it can be customer-ready in 2023.
About Apptronik: Apptronik is a robotics company that has built a platform to deliver a variety of general-purpose robots. The company was founded in 2016 out of the Human Centered Robotics Lab at the University of Texas at Austin, with a mission to leverage innovative technology for the betterment of society. Its goal is to introduce the next generation of robots that will change the way people live and work, while tackling some of our world’s largest challenges. To learn more about careers at Apptronik, visit https://apptronik.com/careers/.
Synapticon macht MOTORCORTEX als Online-Version verfügbar
Böblingen, den 04.08.2022 – Auch in der Welt des Maschinenbaus und der Robotik hat sich Software in den vergangenen Jahren zum entscheidenden Erfolgsfaktor entwickelt. Sowohl die Art und Weise wie Robotersteuerungen entwickelt werden als auch ihre Leistungsfähigkeit in der Praxis sind für die Hersteller von Industrierobotern von großer Bedeutung. Vor diesem Hintergrund hat Synapticon mit MOTORCORTEX.io nun eine bahnbrechende Lösung im SaaS (Software as a Service) Modell vorgestellt. Sie ermöglicht es sehr leistungsfähige, 100% individuelle Robotersteuerungen komfortabel in der Cloud zu entwickeln, auf Steuerungen im Feld bereitzustellen und über einen digitalen Zwilling zu testen. In der Serienproduktion des Roboters bzw. Automatisierungsprodukts kann die individuelle Steuerungs-Software dann in Masse bereitgestellt und auch offline betrieben werden. Dafür können neben Industrie-PCs auch Embedded-Module bis hin zu einem Raspberry Pi eingesetzt werden.
„Die Automatisierung hat in den vergangenen Jahren nochmals deutlich an Fahrt aufgenommen. Tragende Elemente sind dabei unter anderem fahrerlose Transportsysteme (AGV/AMR) sowie Cobots und Leichtbauroboter. Diese Systeme stellen nicht nur neue Herausforderungen an die Hardware, sondern auch an die Software, speziell wenn es um Themen wie Navigation, Sicherheit und das Erlernen von Abläufen geht“, erklärt Nikolai Ensslen, CEO und Gründer von Synapticon. „Die große Herausforderung ist nun für viele Hersteller: Sie müssen ihren Kunden Lösungen anbieten, die preislich attraktiv und immer auf dem neuesten Stand der Technik sind. Die Unternehmen sollen also in der Lage sein, individuelle Steuerungssoftware für ihre Systeme schnell und kosteneffizient zu entwickeln. Hierfür haben wir mit MOTORCORTEX nun eine Lösung im Angebot, die am Markt einmalig ist und welche die Entwicklungszeit von Robotersteuerungen drastisch verkürzt.“
Echtzeit-Steuerungsanwendungen in der Cloud erstellen und auf Offline-Steuerungen deployen sowie aus der Ferne warten
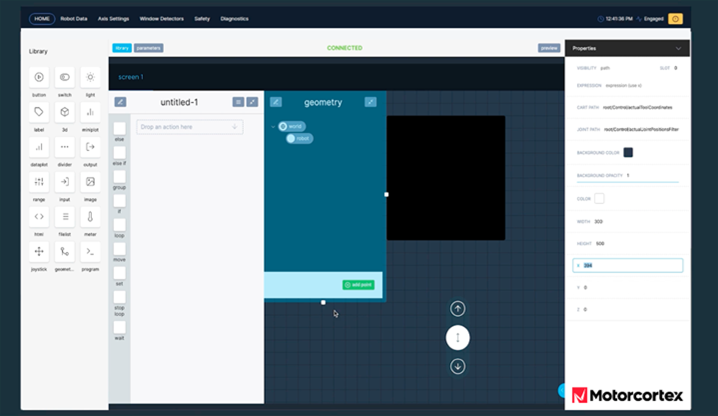
MOTORCORTEX umfasst ein ganzes Paket an Apps bzw. Templates und Tools zum Entwerfen, Steuern, Analysieren und Bereitstellen von industriellen Automatisierungsanwendungen. Dazu gehört beispielsweise auch ein Widget für die einfache grafische Programmierung (“no code”) von Robotern, was im Bereich der Cobots zum Standard wird. Die Plattform für individuelle Roboter- und Maschinensteuerungen ist mit modernster Softwaretechnologie implementiert, erfüllt alle Anforderungen der Automation der Zukunft und ist zugleich hoch leistungsfähig und skalierbar.
Das integrierte Linux-basierte und ressourcenoptimierte Betriebssystem bietet Echtzeitsteuerung von industrieller Hardware über EtherCAT, wie z.B. auf Synapticon SOMANET basierende Antriebsachsen und eine sehr leistungsstarke Kommunikationsschicht für Anwendungen auf höherer Ebene, wie z. B. eine Benutzeroberfläche oder Datenanalysetools. MOTORCORTEX ermöglicht Hochgeschwindigkeits-Streaming-Kommunikation direkt zum Webbrowser ohne Zwischenserver, was in der Industrie eine Wende darstellt. Es ist jetzt möglich, reaktionsschnelle Webanwendungen für eine extrem reibungslose Interaktion mit Maschinen zu erstellen. Die Lösung bietet offene APIs für alle wichtigen Programmiersprachen wie Javascript, Python und C++. Diese offene Architektur bietet viel mehr Freiheiten als aktuelle industrielle Steuerungssysteme und ermöglicht echte Industrie 4.0-Anwendungen mit nur wenigen Codezeilen. Die Kommunikation mit umgebenden bzw. höher liegenden Steuerungseinheiten wird über OPC UA unterstützt.
„Die Nutzung von MOTORCORTEX ist so einfach wie das Einrichten einer einfachen Webseite. Mit etwas Konfigurationsarbeit und ein paar Zeilen Code können sich Entwickler von jedem Webbrowser aus direkt und sicher mit ihrer Maschine verbinden und schnell Daten austauschen. Kein anderes industrielles Steuerungssystem ist so einfach und flexibel für anspruchsvolle und moderne Steuerungsaufgaben einzurichten“, erklärt Nikolai Ensslen. „Anwendungen, die auf MOTORCORTEX basieren, teilen alle ihre Daten automatisch in der darunterliegenden Echtzeitdatenbank, so dass externe Anwendungen oder Dienste einfach und sicher auf die Daten zugreifen können.“
Entwicklung beschleunigt, Kosten gesenkt
Erste Projekte mit Kunden zeigen, dass es Entwicklern mit MOTORCORTEX in der Cloud gelingt, den Entwicklungsprozess von Software um bis zu 90% zu reduzieren. Zugleich sinken tatsächlich die Kosten für die Softwareentwicklung deutlich, da MOTORCORTEX auf ein einfaches Lizenzmodell ohne zusätzliche Kosten für Wartung und Weiterentwicklung setzt. Da MOTORCORTEX zudem vollkommen Hardware-unabhängig ist, bleibt es den Entwicklern freigestellt, welche Hardware-Komponenten sie für die Entwicklung ihrer Steuerungssoftware nutzen. Ideale Resultate und höchste Effizienz verspricht dabei die Kombination der MOTORCORTEX-Software mit den SOMANET-Servoantrieben aus dem Motion Control-Portfolio von Synapticon.
MOTORCORTEX hat nicht den Anspruch, der eigenen Softwareentwicklung von Roboterherstellern oder innovativen Steuerungslösungen von Drittanbietern, etwa zum einfachen Teachen von Robotern oder für die Integration von Bildverarbeitung und KI, zuvor zu kommen bzw. diese zu ersetzen. Die Plattform soll vielmehr als solide Grundlage für diese dienen und die Entwickler in der Basis entlasten.
„MOTORCORTEX versteht sich, ebenso wie die SOMANET-Elektroniken, als im Endprodukt versteckte Infrastruktur. Sie soll ein leistungsfähiges, zuverlässiges Fundament für die modernsten und innovativsten Robotersteuerungen zur Verfügung stellen. Wir sehen uns als Technologie- und Infrastrukturpartner der besten Innovatoren in Robotik und Automation,” fasst Nikolai Ensslen zusammen. „Ich bin mir sicher, dass wie in vielen anderen Industriebereichen zukünftig Software auch in der Robotik zu einem wesentlichen und kritischen Unterscheidungsmerkmal wird. Mit MOTORCORTEX geben wir Unternehmen hierfür die beste Plattform in die Hand, so dass diese sich auf die relevanten Innovationen für Ihre Kunden und die Differenzierung von ihrem Wettbewerb konzentrieren können.“
NAPLES, ITALY — S4E Robotics is pleased to announce the launch of a Kickstarter campaign that will allow the public to meet RoboDriveWheel: the fully integrated wheel for mobile robots. RoboDriveWheel is a new fully integrated motorized wheel designed specifically for the development of a new generation of safe and versatile service mobile robots.
„We believe RoboDriveWheel can help all robotics designers but also enthusiast and hobbyist to create powerful and smart mobile robots with little effort and reducing cost and time“ says Andrea Fontanelli inventor of RoboDriveWheel. „This Kickstarter campaign, to rise 43359€, will help us optimize the production process, manufacture our units and finalize our packaging components“.
RoboDroveWheel integrates Inside a Continental rubber with strong adhesion a powerful brushless motor, a high-efficiency planetary gearbox and a control board implementing state-of-the-art algorithms for torque and velocity control. Robodrivewheel can also detect impacts and collisions thanks to the combined use of torque, acceleration and inclination measurement obtained from the sensors integrated into the control board.
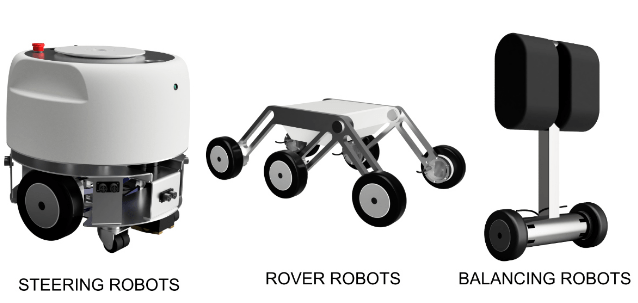
„RoboDriveWheel is the ideal solution for anyone who wants to build a mobile robot with little effort but which integrates the most modern technologies.“ says Roberto Iorio CFO of S4E Robotics. RoboDriveWheel is being produced by S4E Robotics, a company that specialised in industrial automation and robotics. They have designed and produced mobile robots such as ENDRIU: The compact and modular mobile robot for sanitization. The process of designing mobile service robots is highly time-consuming. A service robotic drive wheel must be compact, have good traction friction, must be powerful but fast enough to move the robot at a speed comparable to human speed.
Moreover, a robotic wheel must include all the functionalities, sensors, and electronics. Finally, a service robot must work close to humans so the robot should be capable to identify efficiently the interaction with the environment. Usually, all these capabilities require different components: the wheel, the shaft, one or more bearings with the housing, a traction system (pulley and belt), a motor with a reducer and encoder an IMU and the electronics with several cables for all the sensors.
RoboDriveWheel integrates all these functions inside the wheel and it is easy to connect and control through the single cable for power supply and can-bus communication, a protocol used for years in the automotive sector. To learn more about Kickstarter and supporting RoboDriveWheel’s 43359€ campaign, please visit https://www.kickstarter.com/projects/andreafontanelli/robodrivewheel