Der Playtastic App-programmierbare Roboter ist ein Spielzeug, das nicht nur Spaß macht, sondern auch die Kreativität und das technische Verständnis fördert. Mit der kostenlosen App für iOS und Android kann man den Roboter fernsteuern und programmieren, um ihm über 130 verschiedene Bewegungen beizubringen. Der Roboter kann auch als Lautsprecher verwendet werden, um Musik von einem Smartphone oder einer Speicherkarte abzuspielen. Dabei tanzt er passend zur Musik und leuchtet mit seinen Augen in verschiedenen Farben.
Der Roboter ist aus Kunststoff gefertigt und hat eine Größe von 17,8 x 11,2 x 8,4 cm. Er wiegt 326 g und ist somit leicht zu transportieren. Er verfügt über einen Li-Ion-Akku mit 1.800 mAh, der per USB-C geladen wird und bis zu 4 Stunden Laufzeit bietet. Im Test konnte ich diese Laufzeit erreichen und somit bestätigen. Der Roboter hat vier Bedientasten für die Musik-Steuerung, einen Steckplatz für eine microSD-Karte bis 32 GB, wobei auch größere Karten bei mir funktionierten (getestet, obwohl ich keine SD Karte benötigte, da ich hauptsächlich per Bluetooth gestreamt habe) und einen Lautsprecher mit einer Ausgangsleistung von 5 Watt. Er hat außerdem zwei Arme und zwei Beine, die sich in verschiedene Richtungen bewegen können. Seine Augen bestehen aus LEDs, die in sieben verschiedenen Farben leuchten können.
Die App für den Roboter ist einfach zu bedienen und bietet verschiedene Funktionen. Ich habe auf einem Poco F3, also einem Android Gerät, problemlos getestet. Man kann den Roboter per Bluetooth mit dem Smartphone oder Tablet verbinden und ihn dann über eine virtuelle Fernbedienung steuern. Man kann ihn nach vorne, hinten, rechts und links laufen lassen oder ihn drehen. Man kann auch seine Augenfarbe ändern und ihn sprechen lassen. Die App bietet auch eine Programmier-Funktion, mit der man den Roboter eigene Tänze lernen lassen kann. Man kann aus einer Liste von Bewegungen auswählen und diese in einer bestimmten Reihenfolge anordnen. Man kann auch die Musik, den Rhythmus, die Geschwindigkeit und die Augenfarbe festlegen. Die App zeigt dann eine Vorschau des Tanzes an und man kann ihn speichern oder direkt ausführen lassen. Er ist zwar noch nicht ganz als „Let’s Dance“ Kandidat qualifiziert oder so agil wie Atlas von Boston Dynamics, ist aber eine nett anzuschauende Unterhaltung beim Musik hören; irgendwie putzig. Vor allem jüngere Nutzer werden beeindruckt sein. Die App hat auch eine Musik-Funktion, mit der man Musik von einem Smartphone oder einer Speicherkarte abspielen kann. Der Roboter tanzt dann automatisch zur Musik und leuchtet mit seinen Augen.
Der Playtastic App-programmierbare Roboter ist ein unterhaltsames und lehrreiches Spielzeug, das Kinder und Erwachsene gleichermaßen begeistert. Er bietet viele Möglichkeiten, um den Roboter und seine Tänze individuell zu gestalten und ihm neue Fähigkeiten beizubringen. Die einen werden ihn hauptsächlich als interaktiven Lautsprecher sehen, während die anderen den lustigen Roboter-Begleiter in ihm sehen. Der Roboter ist robust und somit hoffentlich langlebig und hat ein gutes Preis-Leistungs-Verhältnis. Er ist eine tolle Geschenkidee für alle, die sich für Robotik interessieren oder einfach nur Spaß haben wollen beim Musikhören. Der Playtastic App-programmierbare Roboter ist sowohl als interaktiver Lautsprecher als auch Roboter-Spielzeug überzeugend.
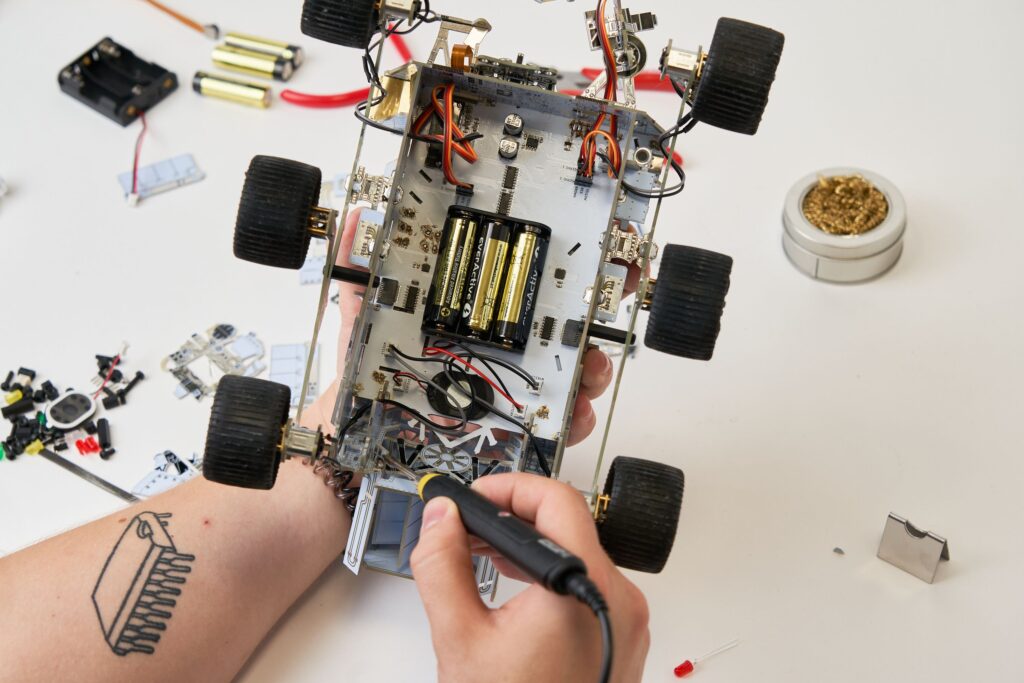
Der Playtastic Spielzeug-Roboter-Bausatz mit Bluetooth und App stellt eine faszinierende Verbindung von Spielspaß und Bildung dar. Dieser innovative Bausatz ermöglicht es Kindern und Erwachsenen, nicht nur einen eigenen Roboter zu bauen, sondern auch die Grundlagen der Programmierung auf spielerische Weise zu erlernen.
Der Bausatz kommt mit einer klaren, bebilderten Anleitung, die den Zusammenbau Schritt für Schritt erklärt. Bastelfreudige Kinder, Eltern oder Großeltern können sich gemeinsam am Aufbau des Roboters erfreuen, indem sie die Einzelteile miteinander verbinden und so ein faszinierendes Robotikprojekt zum Leben erwecken. Mit einer Größe von etwa 19 x 28 x 19 cm und einem Gewicht von 810 g ist der Roboter handlich und gleichzeitig beeindruckend.
Ein herausragendes Merkmal dieses Roboters ist die Integration von Bluetooth-Technologie und einer kostenlosen App für Android und iOS. Diese Funktionalitäten eröffnen vielfältige Möglichkeiten: Nutzer können den Roboter nicht nur programmieren, sondern auch direkt über ein Smartphone oder Tablet steuern. Die App bietet eine benutzerfreundliche Oberfläche, die sowohl das Programmieren als auch die Live-Steuerung des Roboters ermöglicht.
Der Roboter selbst verfügt über vielseitige Bewegungsmöglichkeiten, darunter Vorwärts- und Rückwärtsbewegungen, Drehungen im Kreis sowie tänzerische Einlagen. Ein Greifarm, der in der Lage ist, Gegenstände wie Getränkedosen aufzunehmen und festzuhalten, erweitert die Funktionalität des Roboters und bietet zusätzlichen Spielspaß.
Besonders beeindruckend ist das Gesicht des Roboters, das mit LED-Augen und -Mund ausgestattet ist. Diese Details ermöglichen es dem Roboter, Gefühle auszudrücken, sei es durch fröhliche Mimik während des Tanzens oder durch einen griesgrämigen Gesichtsausdruck in anderen Situationen. Dies verleiht dem Roboter eine persönliche Note und fördert die emotionale Verbindung der Nutzer zu ihrem selbstgebauten Roboterfreund.
Die Möglichkeit, den Roboter mit einfachen Programmierbefehlen zu steuern und ihn auf kreative Weise zum Leben zu erwecken, macht den Playtastic Spielzeug-Roboter-Bausatz zu einem lehrreichen und unterhaltsamen Erlebnis für Kinder und Erwachsene gleichermaßen. Die Verbindung von Technologie, kreativem Basteln und spielerischem Lernen macht diesen Bausatz zu einer empfehlenswerten Option für alle, die ihre Begeisterung für Robotik entdecken möchten.
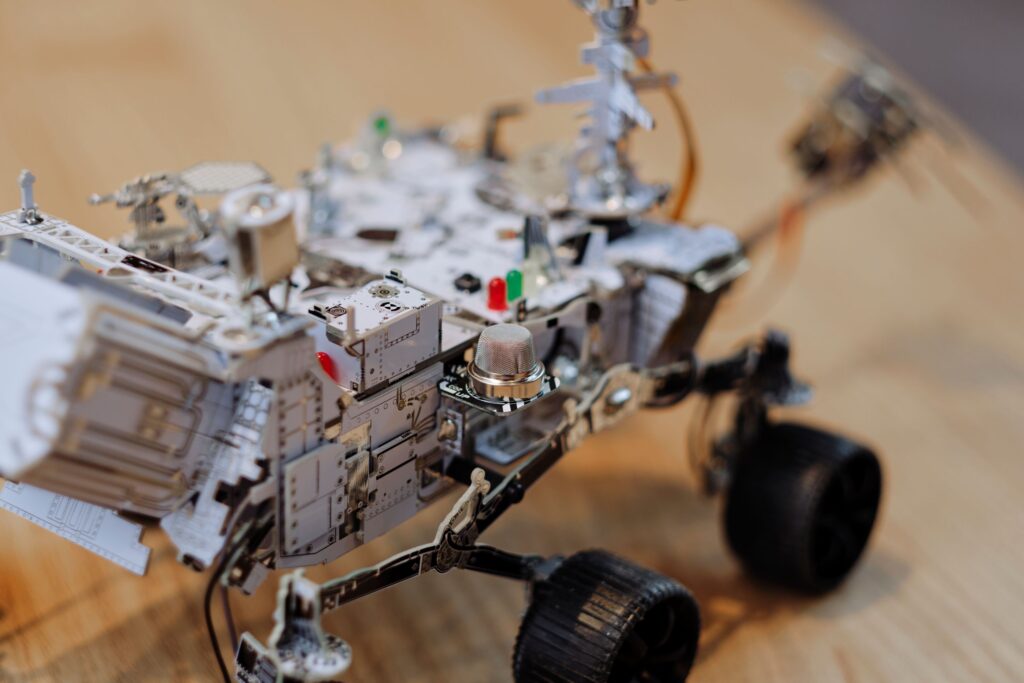
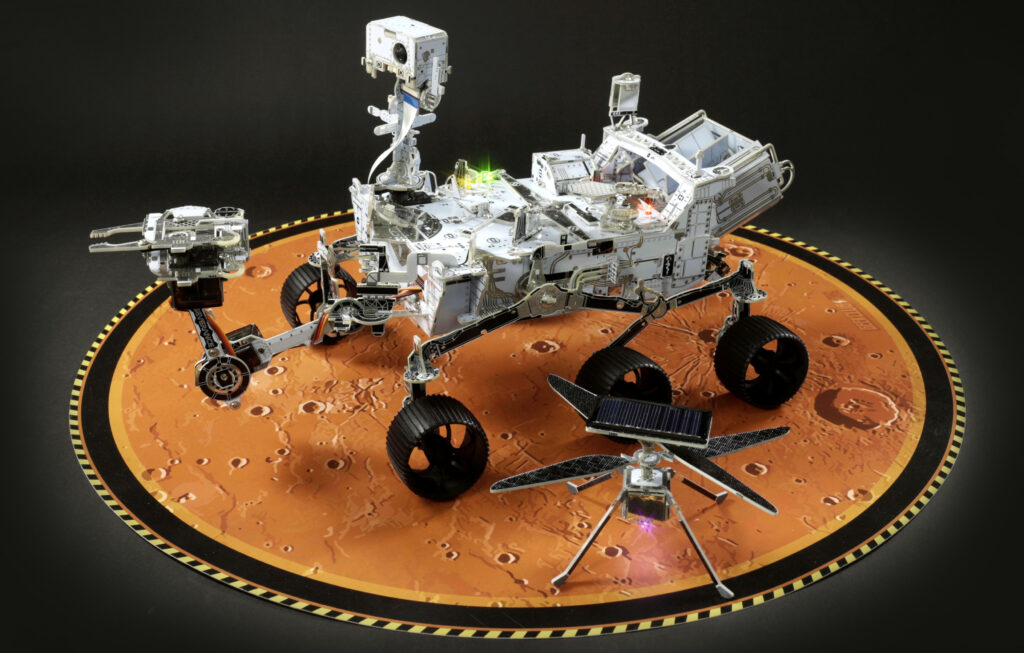
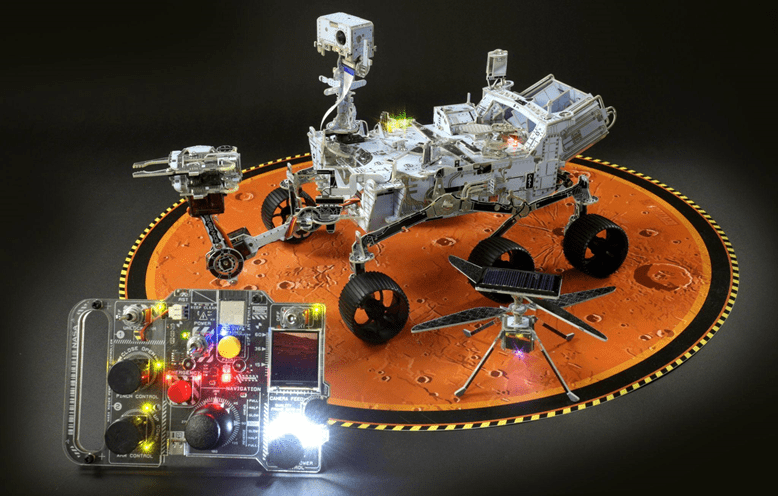
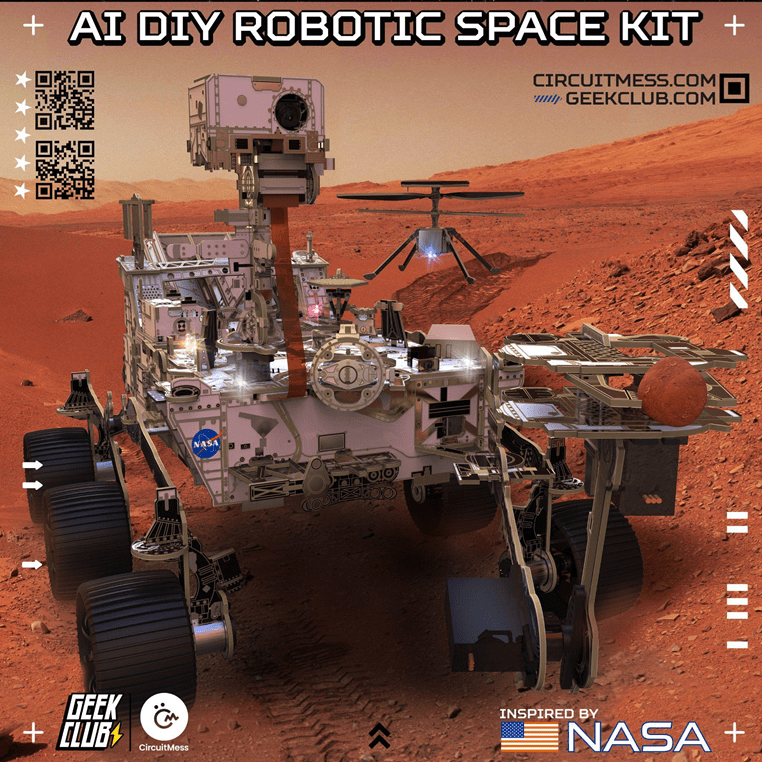
After a series of successful Kickstarter Campaigns, Geek Club and CircuitMess launch their most ambitious project yet – a NASA-approved AI-powered scale model Replica of the Perseverance Space Rover
Zagreb, Croatia – October 31st, 2023. – Today, Geek Club and CircuitMess announced their Kickstarter space exploration campaign designed to teach children eleven and up about engineering, AI, and coding by assembling the iconic NASA Perseverance Space Rover, as well as a series of other NASA-inspired space vehicles.
This new space-themed line of DIY educational products was born out of both companies‘ shared vision to aim for the stars and to take their fans with them. The Kickstarter campaign starts today, October 31st, and will last for 35 days.
The collaboration was a logical union of the two companies. Both companies create educational STEM DIY kits that are targeted towards kids and adults. Both share the same mission: To make learning STEM skills easy and fun.
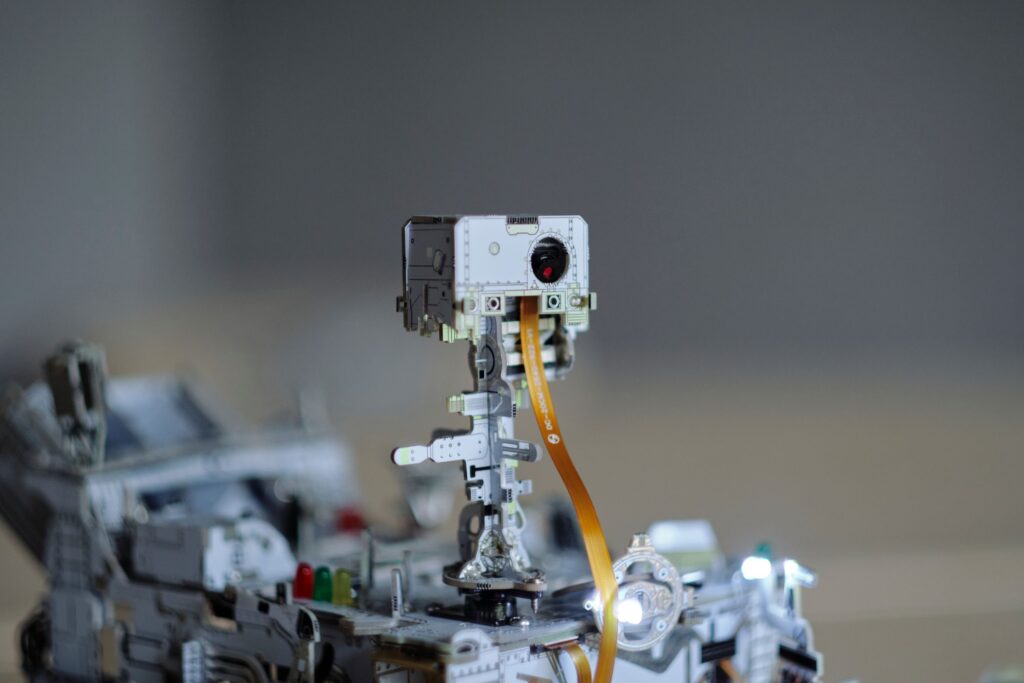
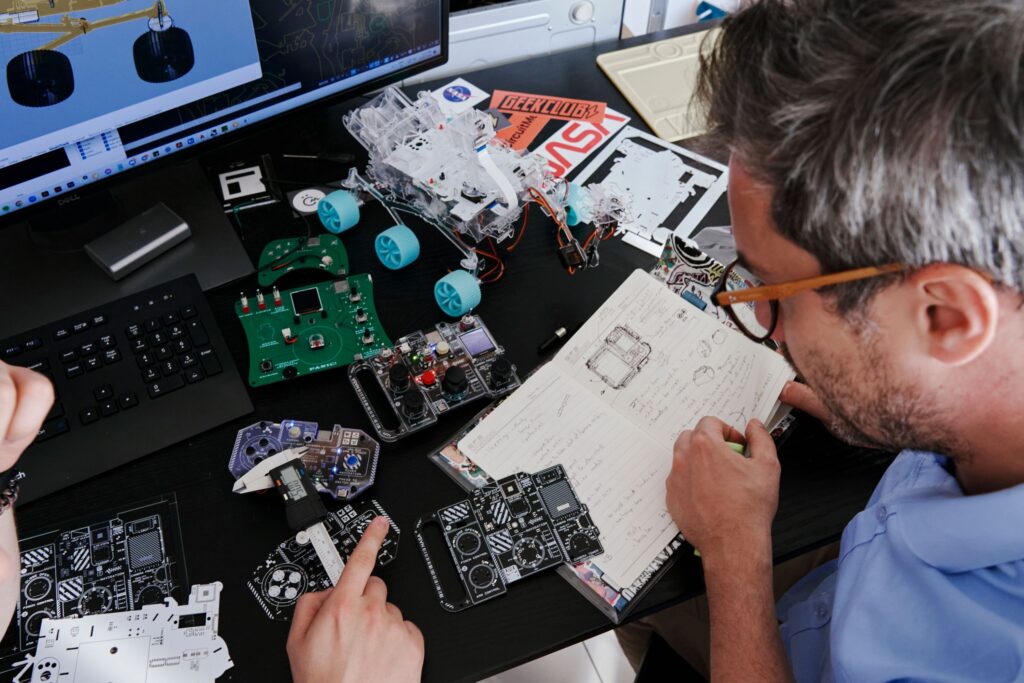
“For decades, the team and I have been crafting gadgets for geeks always inspired by space exploration,” says Nicolas Deladerrière, co-founder of Geek Club. “Inspired by Mars exploration, we’ve studied thousands of official documents and blueprints to craft an authentic Mars exploration experience. The product comes alive thanks to microchips, electromotors, and artificial intelligence. Imagine simulating your own Mars mission right from your desk!”
Geek Club is an American company that specializes in designing and producing DIY robotics kits that educate their users on soldering and electronics. They focus primarily on space exploration and robotics, all to make learning engineering skills easy and fun for kids, adults, and everyone in between.
“We have successfully delivered seven Kickstarter campaigns, raised more than 2.5 million dollars, and made hundreds of thousands of geeks all around the world extremely happy,” says Albert Gajšak, CEO of CircuitMess. “In a universe where space and technology are constantly growing, we’re here to ensure you’re never left behind.”
The new product line consists of five unique space-themed products:
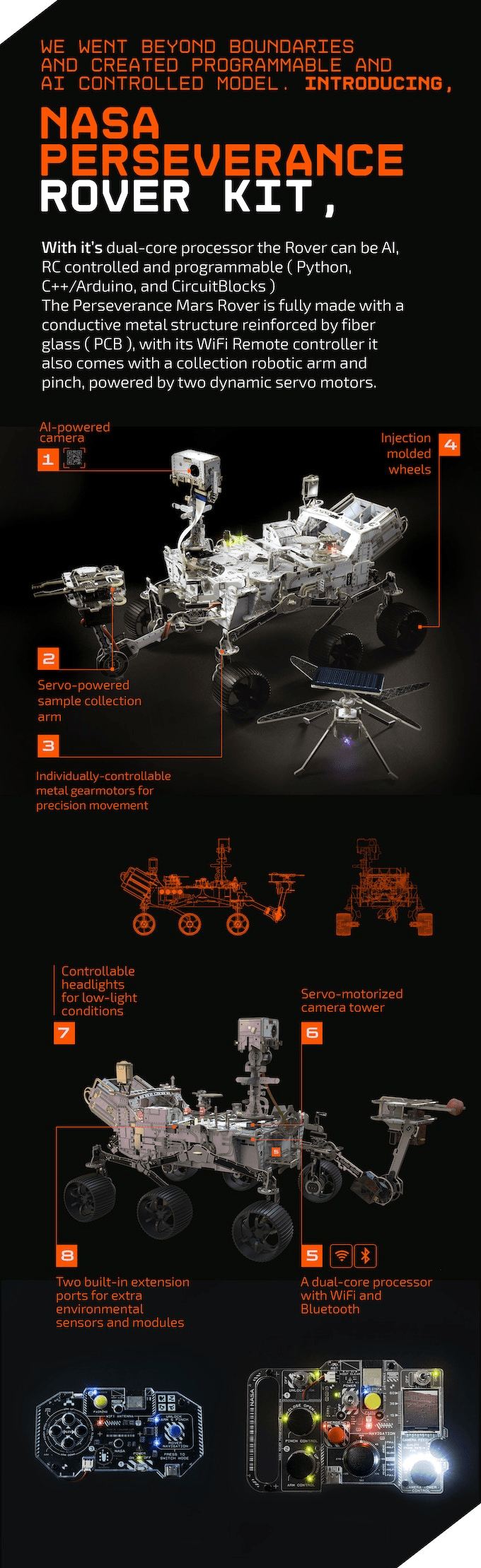
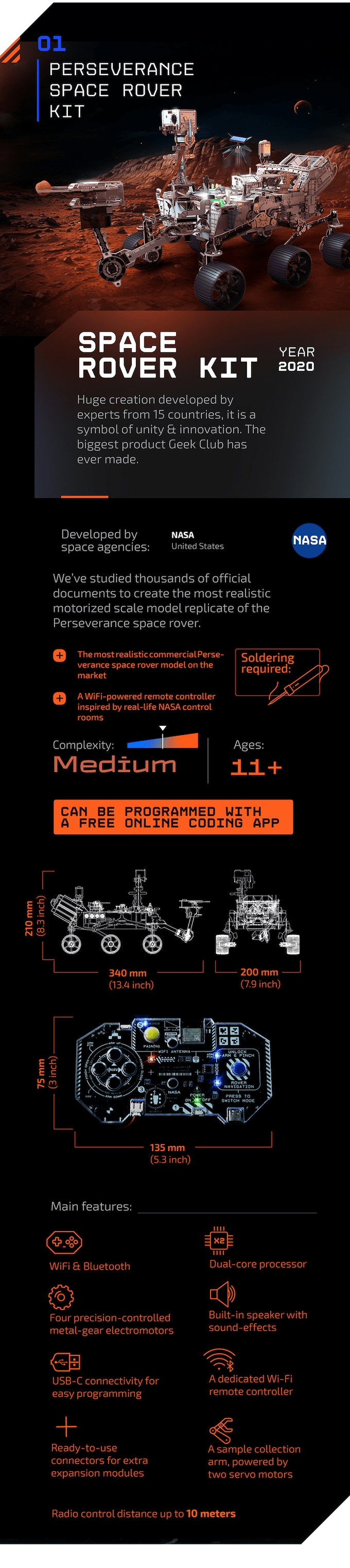
1. The Perseverance Space Rover Kit
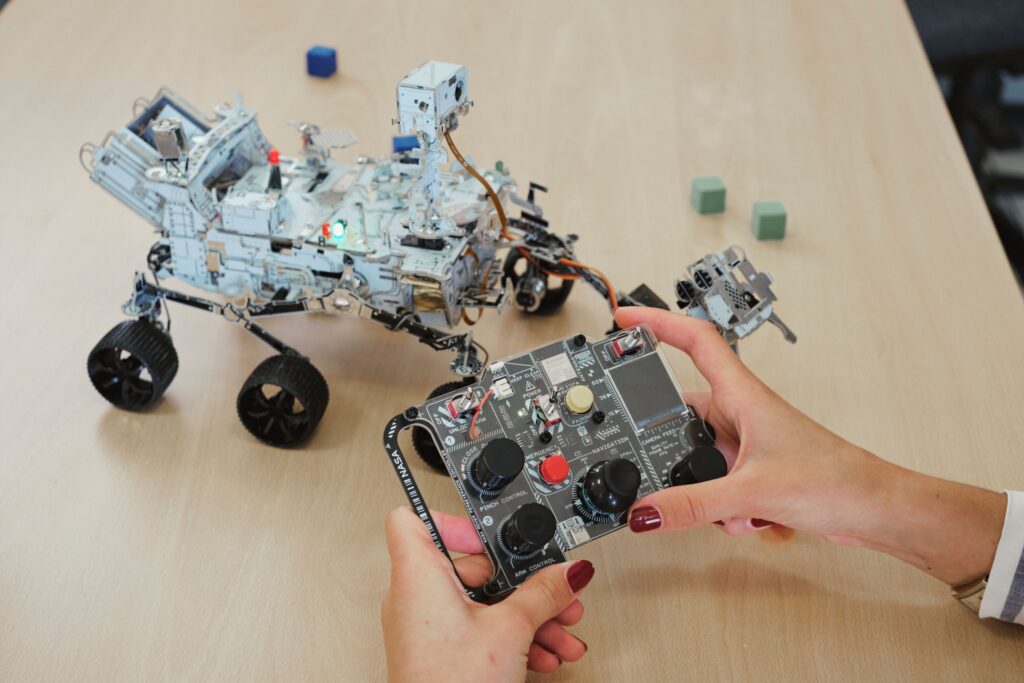
This kit is designed to be an educational journey into programming, electronics, robotics, and AI. The model comes with four electromotors, six wheels, a control system with a dual-core Espressif ESP32 processor, Wi-Fi, and Bluetooth connectivity, a sample collection arm based on the real thing with two servo motors, a Wi-Fi-connected remote controller, and support for programming in Python or via a Scratch-inspired drag-and-drop visual coding environment.
Alongside the Perseverance Space Rover, you’ll be able to get more iconic space vehicles:
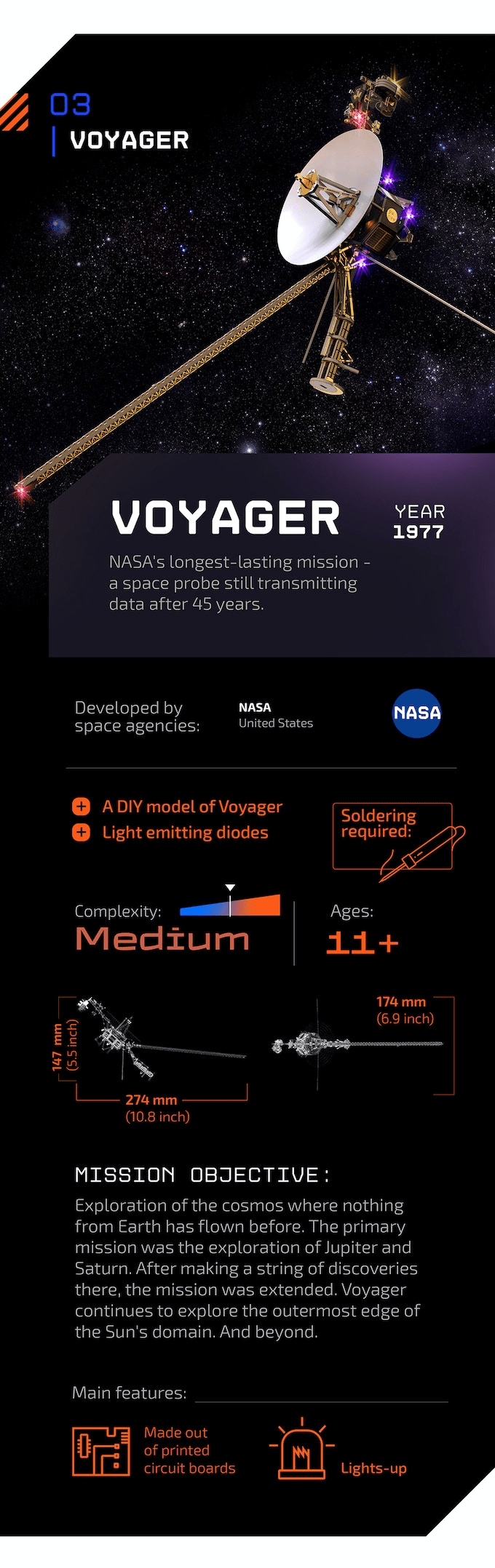
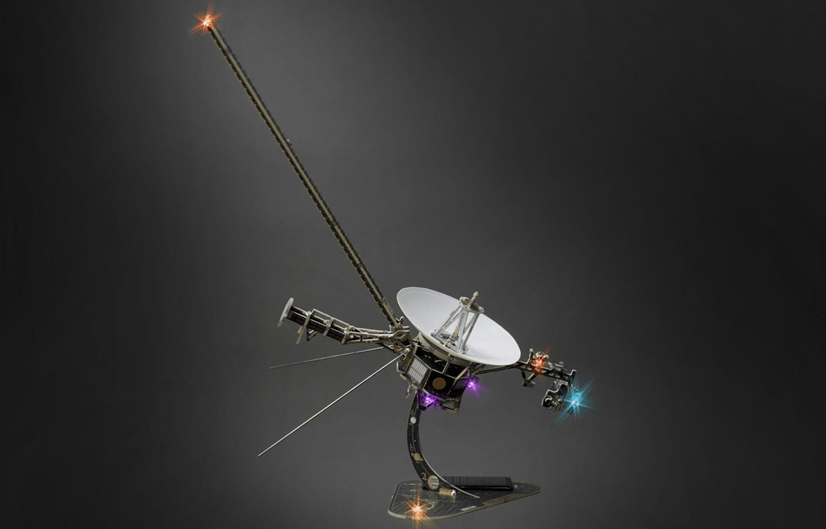
2. The Voyager: A DIY kit made as a tribute to NASA’s longest-lasting mission, which has been beaming back data for an incredible 45 years and counting.
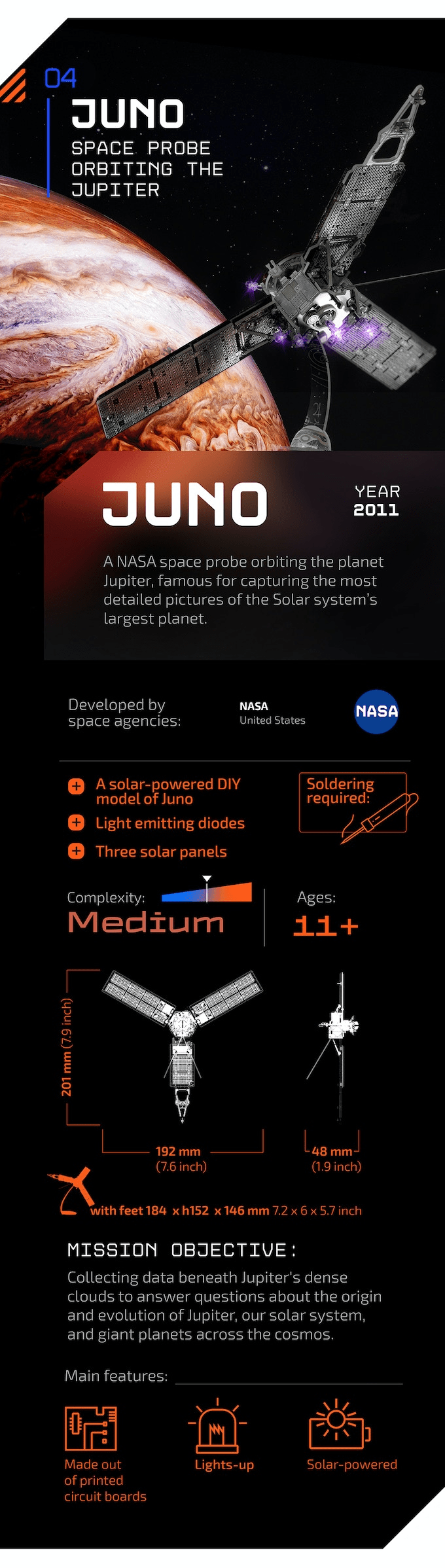
3. Juno: A solar-powered DIY kit celebrating the mission that gave us the most detailed and breathtaking images of Jupiter.
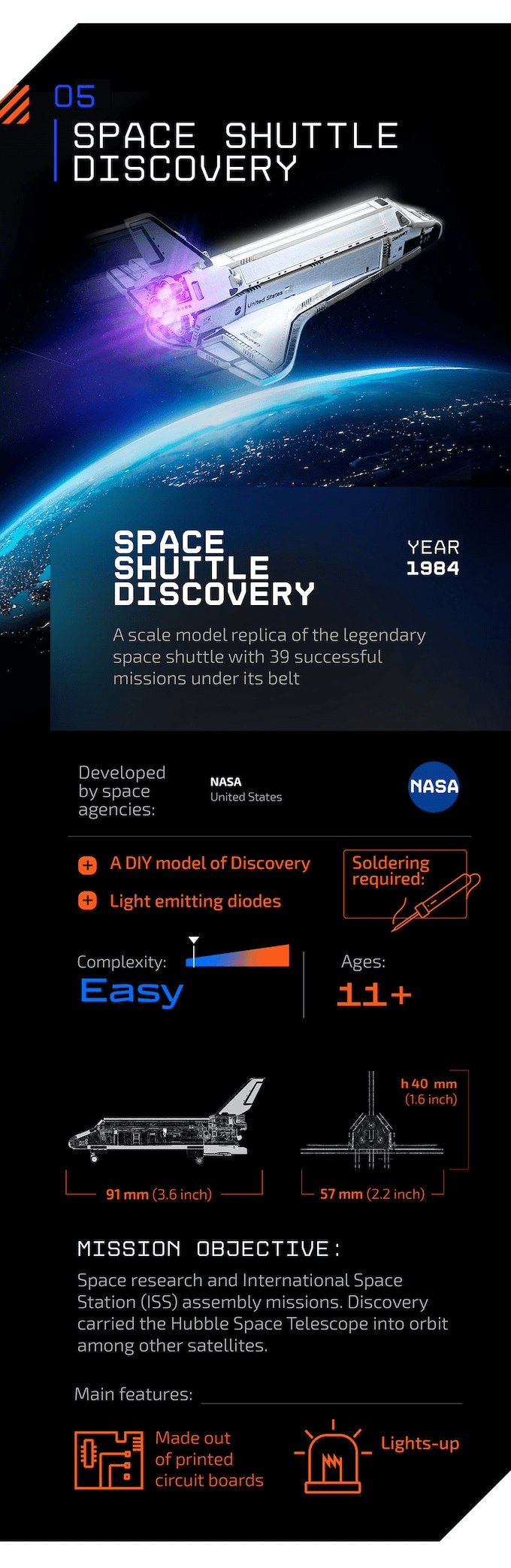
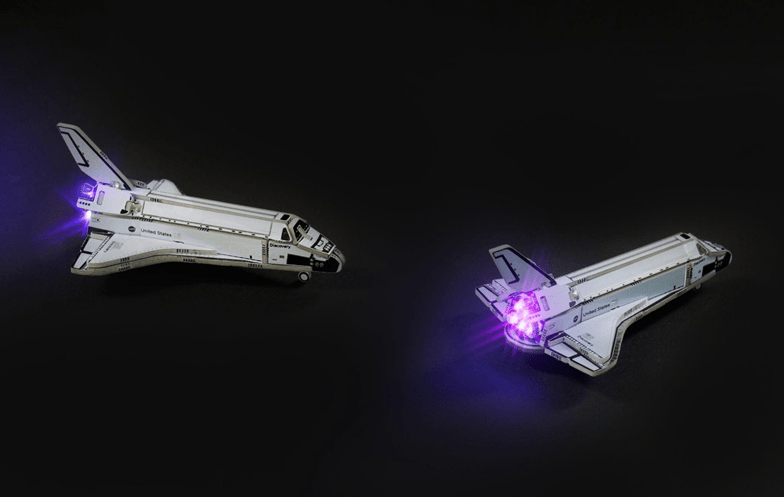
4. Discovery: A DIY kit honoring the legendary space shuttle with 39 successful orbital flights under its belt.
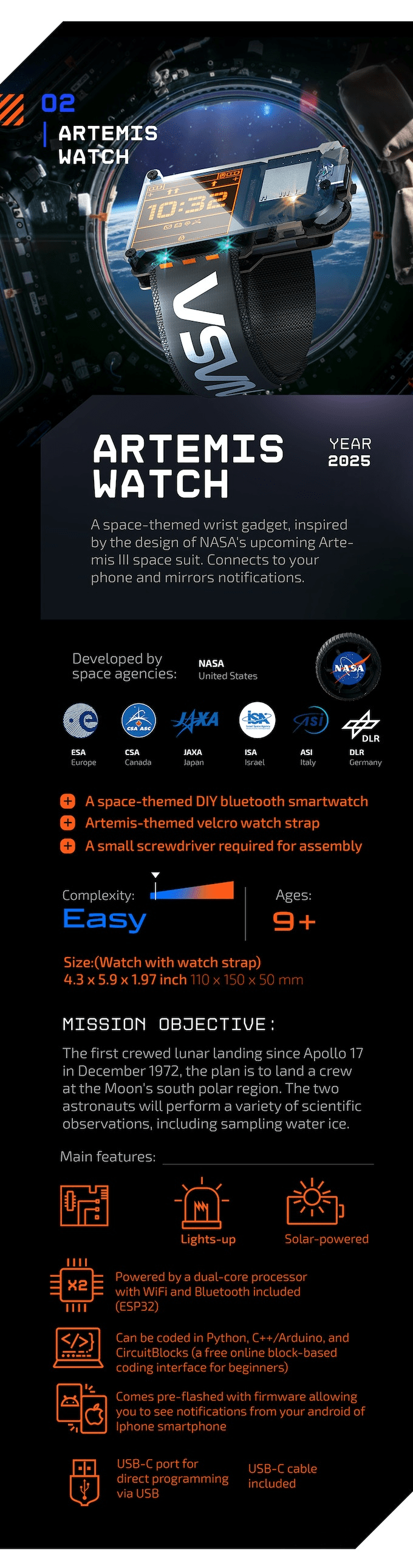
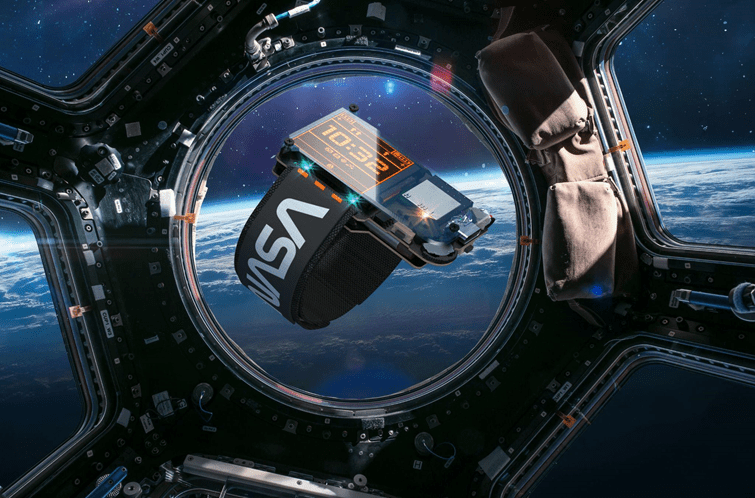
5. The Artemis Watch: A sleek, space-themed wrist gadget inspired by NASA’s upcoming Artemis space suit design. The watch is a programmable device equipped with an LCD display, Bluetooth, and a gyroscope.
The Perseverance Educational Space Rover Kit is available for pre-order now on Kickstarter, starting at $149.
No previous experience or knowledge is needed for assembling your very own space rover. The kit is designed for anyone aged 11+ and comes with detailed video instructions.
Communication & Safety Challenges Facing Mobile Robots Manufacturers
Mobile robots are everywhere, from warehouses to hospitals and even on the street. Their popularity is easy to understand; they’re cheaper, safer, easier to find, and more productive than actual workers. They’re easy to scale or combine with other machines. As mobile robots collect a lot of real-time data, companies can use mobile robots to start their IIoT journey.
But to work efficiently, mobile robots need safe and reliable communication. This article outlines the main communication and safety challenges facing mobile robot manufacturers and provides an easy way to overcome these challenges to keep mobile robots moving.
What are Mobile Robots?
Before we begin, let’s define what we mean by mobile robots.
Mobile robots transport materials from one location to another and come in two types, automated guided vehicles (AGVs) and autonomous mobile robots (AMRs). AGVs use guiding infrastructure (wires reflectors, reflectors, or magnetic strips) to follow predetermined routes. If an object blocks an AGV’s path, the AGV stops and waits until the object is removed.
AMRs are more dynamic. They navigate via maps and use data from cameras, built-in sensors, or laser scanners to detect their surroundings and choose the most efficient route. If an object blocks an AMR’s planned route, it selects another route. As AMRs are not reliant on guiding infrastructure, they’re quicker to install and can adapt to logistical changes.
What are the Communication and Safety Challenges Facing Mobile Robot Manufacturers?
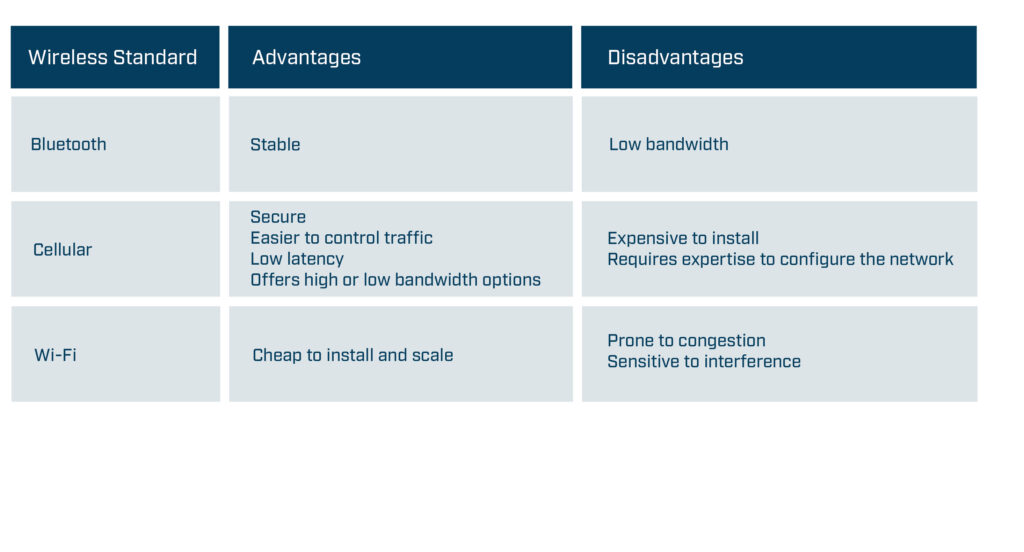
1. Establish a Wireless Connection The first challenge for mobile robot manufacturers is to select the most suitable wireless technology. The usual advice is to establish the requirements, evaluate the standards, and choose the best match. Unfortunately, this isn’t always possible for mobile robot manufacturers as often they don’t know where the machine will be located or the exact details of the target application.
Sometimes a Bluetooth connection will be ideal as it offers a stable non-congested connection, while other applications will require a high-speed, secure cellular connection. What would be useful for mobile robot manufacturers is to have a networking technology that’s easy to change to meet specific requirements.
Figure 1. Wireless standard -high-level advantages and disadvantages
The second challenge is to ensure that the installation works as planned. Before installing a wireless solution, complete a predictive site survey based on facility drawings to ensure the mobile robots have sufficient signal coverage throughout the location. The site survey should identify the optimal location for the Access Points, the correct antenna type, the optimal antenna angle, and how to mitigate interference. After the installation, use wireless sniffer tools to check the design and adjust APs or antenna as required.
2. Connecting Mobile Robots to Industrial Networks
Mobile robots need to communicate with controllers at the relevant site even though the mobile robots and controllers are often using different industrial protocols. For example, an AGV might use CANopen while the controller might use PROFINET. Furthermore, mobile robot manufacturers may want to use the same AGV model on a different site where the controller uses another industrial network, such as EtherCAT.
Mobile robot manufacturers also need to ensure that their mobile robots have sufficient capacity to process the required amount of data. The required amount of data will vary depending on the size and type of installation. Large installations may use more data as the routing algorithms need to cover a larger area, more vehicles, and more potential routes. Navigation systems such as vision navigation process images and therefore require more processing power than installations using other navigation systems such as reflectors. As a result, mobile robot manufacturers must solve the following challenges:
They need a networking technology that supports all major fieldbus and industrial Ethernet networks.
It needs to be easy to change the networking technology to enable the mobile robot to communicate on the same industrial network as the controller without changing the hardware design.
They need to ensure that the networking technology has sufficient capacity and functionality to process the required data.
3. Creating a Safe System
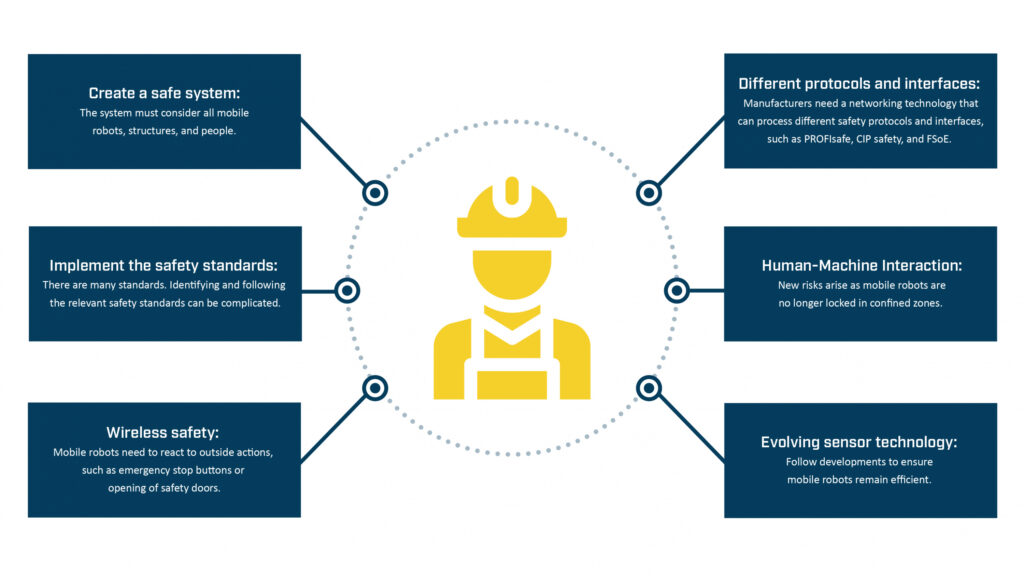
Creating a system where mobile robots can safely transport material is a critical but challenging task. Mobile robot manufacturers need to create a system that considers all the diverse types of mobile robots, structures, and people in the environment. They need to ensure that the mobile robots react to outside actions, such as someone opening a safety door or pushing an emergency stop button, and that the networking solution can process different safety protocols and interfaces. They need to consider that AMRs move freely and manage the risk of collisions accordingly. The technology used in sensors is constantly evolving, and mobile robot manufacturers need to follow the developments to ensure their products remain as efficient as possible.
Figure 2. Overview of Safety Challenges for Mobile Robot Manufacturers
Safety Standards
The safety standards provide guidelines on implementing safety-related components, preparing the environment, and maintaining machines or equipment.
While compliance with the different safety standards (ISO, DIN, IEC, ANSI, etc.) is mostly voluntary, machine builders in the European Union are legally required to follow the safety standards in the machinery directives. Machinery directive 2006/42/EC is always applicable for mobile robot manufacturers, and in some applications, directive 2014/30/EU might also be relevant as it regulates the electromagnetic compatibility of equipment. Machinery directive 2006/42/EC describes the requirements for the design and construction of safe machines introduced into the European market. Manufacturers can only affix a CE label and deliver the machine to their customers if they can prove in the declaration of conformity that they have fulfilled the directive’s requirements.
Although the other safety standards are not mandatory, manufacturers should still follow them as they help to fulfill the requirements in machinery directive 2006/42/EC. For example, manufacturers can follow the guidance in ISO 12100 to reduce identified risks to an acceptable residual risk. They can use ISO 13849 or IEC 62061 to find the required safety level for each risk and ensure that the corresponding safety-related function meets the defined requirements. Mobile robot manufacturers decide how they achieve a certain safety level. For example, they can decrease the speed of the mobile robot to lower the risk of collisions and severity of injuries to an acceptable level. Or they can ensure that mobile robots only operate in separated zones where human access is prohibited (defined as confined zones in ISO 3691-4). Identifying the correct standards and implementing the requirements is the best way mobile manufacturers can create a safe system. But as this summary suggests, it’s a complicated and time-consuming process.
4. Ensuring a Reliable CAN Communication A reliable and easy-to-implement standard since the 1980s, communication-based on CAN technology is still growing in popularity, mainly due to its use in various booming industries, such as E-Mobility and Battery Energy Storage Systems (BESS). CAN is simple, energy and cost-efficient. All the devices on the network can access all the information, and it’s an open standard, meaning that users can adapt and extend the messages to meet their needs. For mobile robot manufacturers, establishing a CAN connection is becoming even more vital as it enables them to monitor the lithium-ion batteries increasingly used in mobile robot drive systems, either in retrofit systems or in new installations. Mobile robot manufacturers need to do the following:
1.Establish a reliable connection to the CAN or CANopen communication standards to enable them to check their devices, such as monitoring the battery’s status and performance.
2. Protect systems from electromagnetic interference (EMI), as EMI can destroy a system’s electronics. The risk of EMI is significant in retrofits as adding new components, such as batteries next to the communication cable, results in the introduction of high-frequency electromagnetic disturbances.
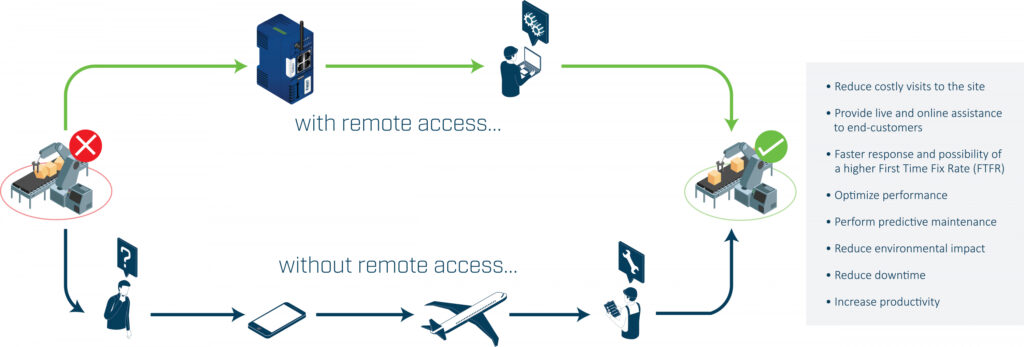
5. Accessing Mobile Robots Remotely The ability to remotely access a machine’s control system can enable mobile robot vendors or engineers to troubleshoot and resolve most problems without traveling to the site.
Figure 3. Benefits of Remote Access
The challenge is to create a remote access solution that balances the needs of the IT department with the needs of the engineer or vendor.
The IT department wants to ensure that the network remains secure, reliable, and retains integrity. As a result, the remote access solution should include the following security measures:
Use outbound connections rather than inbound connections to keep the impact on the firewall to a minimum.
Separate the relevant traffic from the rest of the network.
Encrypt and protect all traffic to ensure its confidentiality and integrity.
Ensure that vendors work in line with or are certified to relevant security standards such as ISO 27001
Ensure that suppliers complete regular security audits.
The engineer or vendor wants an easy-to-use and dependable system. It should be easy for users to connect to the mobile robots and access the required information. If the installation might change, it should be easy to scale the number of robots as required. If the mobile robots are in a different country from the vendors or engineers, the networking infrastructure must have sufficient coverage and redundancy to guarantee availability worldwide.
Conclusion As we’ve seen, mobile robot manufacturers must solve many communication and safety challenges. They must establish a wireless connection, send data over different networks, ensure safety, connect to CAN systems, and securely access the robots remotely. And to make it more complicated, each installation must be re-assessed and adapted to meet the on-site requirements.
Best practice to implement mobile robot communication Mobile robot manufacturers are rarely communication or safety experts. Subsequently, they can find it time-consuming and expensive to try and develop the required communication technology in-house. Enlisting purpose-built third-party communication solutions not only solves the communication challenges at hand, it also provides other benefits.
Modern communication solutions have a modular design enabling mobile robot manufacturers to remove one networking product designed for one standard or protocol and replace it with a product designed for a different standard or protocol without impacting any other part of the machine. For example, Bluetooth may be the most suitable wireless standard in one installation, while Wi-Fi may provide better coverage in another installation. Similarly, one site may use the PROFINET and PROFIsafe protocols, while another may use different industrial and safety protocols. In both scenarios, mobile robot manufacturers can use communication products to change the networking technology to meet the local requirements without making any changes to the hardware design.
Authors:
Mark Crossley, Daniel Heinzler, Fredrik Brynolf, Thomas Carlsson
HMS Networks
HMS Networks is an industrial communication expert based in Sweden, providing several solutions for AGV communication. Read more on www.hms-networks.com/agv
In den letzten 20 Jahren hat sich Bluetooth zu einem anerkannten Verbindungsstandard für den Datentransfer entwickelt. Diese neue Technologie, die ursprünglich für Audioverbindungen verwendet wurde, hat sich mittlerweile auf ein breites Spektrum weiterer Anwendungen für den drahtlosen Transfer verschlüsselter Daten ausgebreitet. Die Herausforderung bestand für die meisten Produktentwickler darin, einen schnellen und einfachen Weg zu finden, diese sagenhafte Technologie in ihre Geräte zu integrieren, ohne bei diesem Prozess Engineering-Ressourcen zu vergeuden. Das neue Panasonic – PAN1325A-HCI-85 macht diese Aufgabe zu einem Kinderspiel, indem es alles, was Sie zur Integration von Bluetooth in ein Produkt benötigen, in einem einzigen winzigen Modul vereint.
Das Modul
Panasonic PAN1325A-HCI-85 ist ein vollständiges HCI-Modul, das Bluetooth-Gespräche der Klasse 1 oder Klasse 2 über kurze Entfernungen bietet. Das Gerät ist mit oder ohne Antenne verfügbar und lässt sich über seinen vielseitigen UART leicht mit verschiedenen Steuerungsmodulen verbinden. Beim Design dieses Moduls haben die Entwickler alles darangesetzt, es so klein wie möglich zu gestalten und dabei möglichst viel des Bluetooth-Ökosystems zu bieten.
Das Modul ist in einem Paket zur Oberflächenmontage erhältlich, das eine Abschirmung zur Störfestigkeit umfasst. PAN1325-HCI-85 baut auf dem neuen Onboard-Controller CC2560A von Texas Instruments auf, der über ein bedeutend schnelleres Startskript als das von älteren Versionen verfügt. Das Modul funktioniert als PCM-Schnittstelle im Master-/Slave-Betrieb, unterstützt eine Reihe verschiedener Codecs und verfügt über CVSD-Transcoder auf insgesamt drei SCO-Kanälen. Zur Sicherheit unterstützt das Modul 8-bit- bis 128-bit-Verschlüsselungen sowie gängige Bluetooth-Standards wie SPP, A2DP und weitere, die auf der Website des Moduls aufgeführt sind.
Was macht Panasonic PAN1325A-HCI-85 so einzigartig?
Im Gegensatz zu anderen schlichteren Bluetooth-Modulen umfasst das Panasonic-System sowohl einen hochentwickelten Bluetooth-Sender/-Empfänger als auch umfangreiche unterstützende Schnittstellen und Protokolle, die die Steuerung erleichtern. Panasonic hat PAN1325A so konzipiert, dass es sich mit einer Vielzahl von Controllern kombinieren lässt. Dazu zählt z. B. MSP430BT5190 von Texas Instruments, der einen vollständigen und getesteten Bluetooth-Stack bietet und serielle Schnittstellen für einfachere Anwendungen unterstützt, sowie der leistungsfähigere ARM 7 Controller für erweiterte A2DP-Profilanforderungen.
Da PAN1325A-HCI-85 für die Verwendung in einer Vielzahl von tragbaren Geräten konzipiert wurde, wurde der Leistungsbedarf auf ein Minimum reduziert. Das Modul bietet sogar eine Reihe verschiedener Betriebsmodi bei Nichtbenutzung. PAN1325A lässt sich z. B. so programmieren, dass es bei Nichtbenutzung in den Ruhemodus umschaltet. Diese Funktion macht es zu einer idealen Wahl für Geräte mit eingeschränkter Batterielebensdauer, bei denen gelegentlich eine Bluetooth-Verbindung benötigt wird.
Anwendungsbereiche
Das PAN1325A-HCI-85 Bluetooth-Modul kann in jedem Gerät verwendet werden, das eine stabile Verbindung für Audio- oder Datentransfers benötigt. Zu den Anwendungen zählen Mobiltelefone, Unterhaltungselektronik, medizinische Scanner und Automobilanwendungen. Aufgrund seiner kleinen Größe und seinen flexiblen Leistungsanforderungen kann das Modul problemlos mit fast allen Geräten kombiniert werden, die eine Bluetooth-Verbindung benötigen. Diese Art von Modul ist sogar bei der Lego First Robotics League für die entfernte Steuerung von Robotern verwendet worden. Bei diesem jährlich stattfindenden internationalen Wettkampf treten Teams aus der ganzen Welt in einem Roboterkampf gegeneinander an. Für viele dieser Roboter werden Bluetooth-Controller wie Panasonic PAN1325-HCI-85 zur Gerätesteuerung verwendet. PAN1325A wurde von einem Händler sogar bei einem Wettbewerb in einem dieser Roboter eingesetzt und somit auf ein vollkommen neuartiges Anwendungsgebiet ausgeweitet.
Zu den Anwendungen zählt außerdem eine neue Generation kabelloser Lautsprecher, die über Bluetooth mit Mobiltelefonen und Tablets verbunden werden. Diese Verbindung bietet einen stabilen Kanal zur Übertragung von Audio, das über die Lautsprecher ertönt. Dieselbe Technologie wird nun auch in viele Fahrzeugmodelle integriert, was dem Fahrer ermöglicht, sein Mobiltelefon sicher und freihändig zu bedienen. Da der Betrieb des PAN1325A-HCI-85 äußerst wenig Platz und Leistung erfordert, sind die Anwendungsmöglichkeiten nahezu grenzenlos.
Reality Robotics Limited proudly presents the Be the Robot™ Project!
What is the Be the Robot™ project you may ask?
It is an expertly-engineered-multi-motor-wireless-animated-mobile-robotic-toy-platform that features an advanced internal operating system for communicating through an open source APP with an Android / iOSsmart device through Bluetooth™.
„gloomyandy“ (Andy Shaw) has uploaded a video to youtube, showing a Lego Mindstorms NXT brick playing music streamed via bluetooth or USB-cable. Maybe he will make the source-code public? Up to that time, enjoy this video: