Letzte Woche, am 11. Juni 2026, ist die Fußball-WM gestartet: Mexiko eröffnete das Turnier im Azteca-Stadion in Mexiko-Stadt gegen Südafrika und gewann 2:0. Die WM 2026 findet erstmals in drei Ländern statt: Mexiko, USA und Kanada.
Während die besten Fußballer der Welt um den Pokal kämpfen, verfolgt der RoboCup ein eigenes Ziel: Bis 2050 soll ein Team aus humanoiden Robotern gegen den amtierenden menschlichen Fußball-Weltmeister antreten – und gewinnen.
Klingt wie Science-Fiction? Genau deshalb ist es so spannend.
Wie hat alles begonnen?
Der RoboCup wurde 1997 gegründet. Seine große Vision: Roboter sollen nicht nur ferngesteuert herumrollen, sondern selbstständig sehen, denken, laufen, passen und Tore schießen.
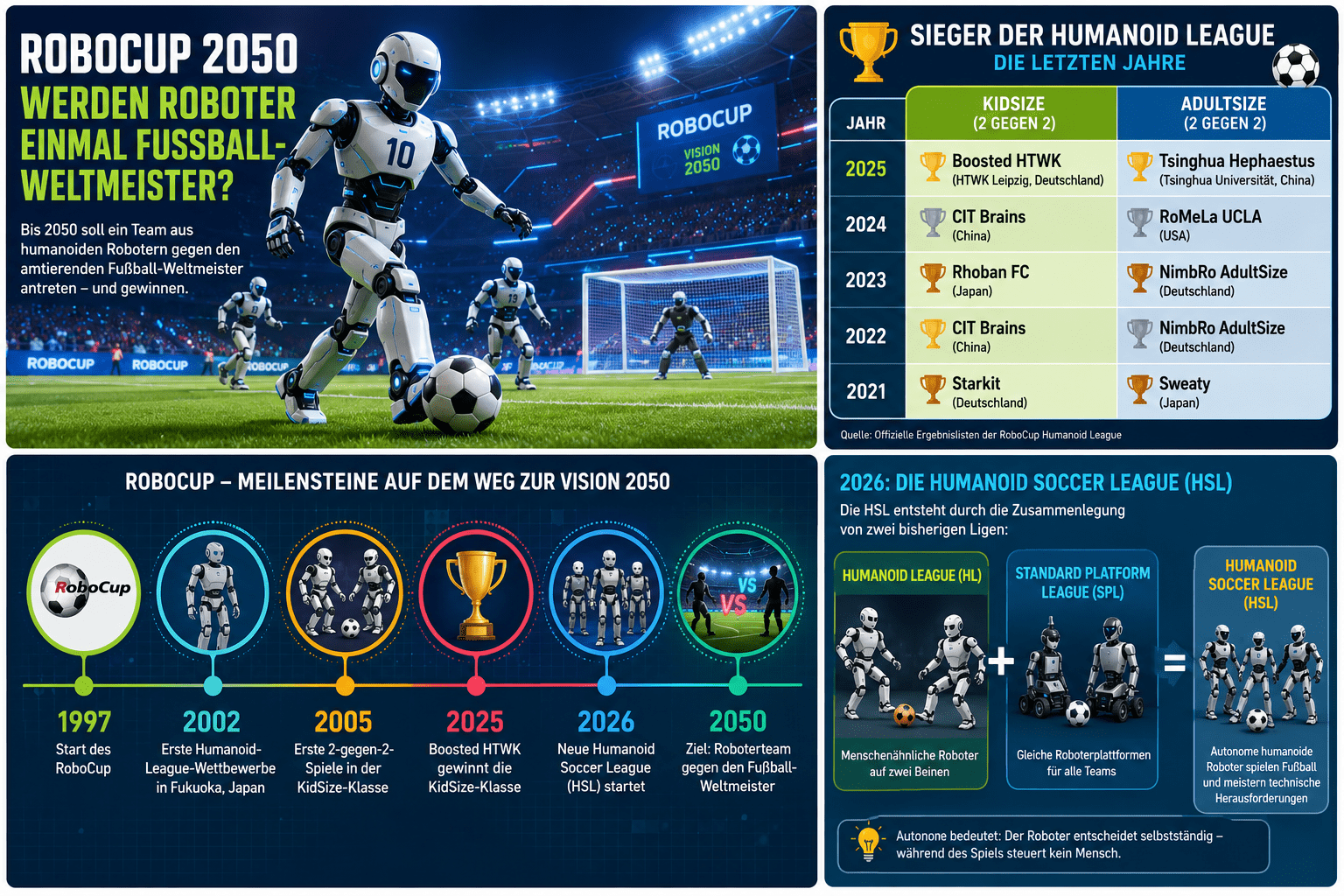
Die Humanoid League, also der Wettbewerb für menschenähnliche Roboter, kam später dazu. Ihr erster Wettbewerb fand 2002 in Fukuoka, Japan statt. Damals war das Ziel noch extrem mutig: Einen Roboter zu bauen, der auf zwei Beinen laufen und Fußball spielen kann. In den ersten Jahren gab es eher Aufgaben wie Balancieren, Elfmeterschießen oder kurze Demonstrationen. Richtige 2-gegen-2-Spiele in der KidSize-Klasse wurden ab 2005 eingeführt.
Fußball ist für Roboter nämlich ein perfekter Härtetest: Sie müssen den Ball erkennen, ihren Platz auf dem Feld verstehen, mit anderen Robotern zusammenarbeiten, dabei nicht umfallen und sich an geltende Regeln halten.
Wo stehen wir 2026?
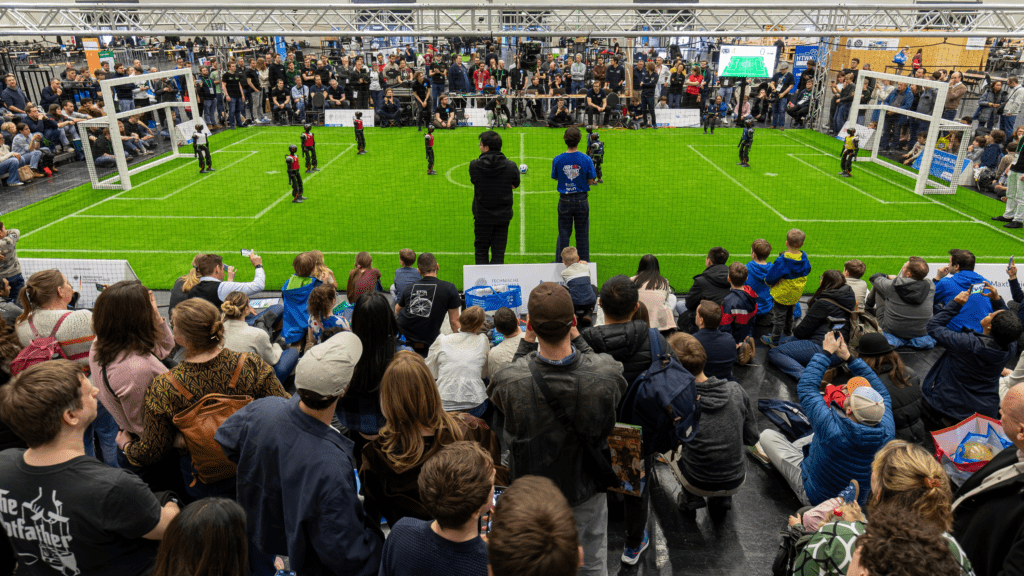
Humanoiden Roboterfußball gibt es schon seit über 20 Jahren. Seit 2026 gibt es die neue Humanoid Soccer League, kurz HSL.
Diese HSL entsteht durch die Zusammenlegung der früheren Humanoid League und der Standard Platform League. Sie findet beim RoboCup 2026 erstmals in dieser neuen Form statt. In der HSL spielen vollständig autonome humanoide Roboter Fußball und treten zusätzlich in technischen Herausforderungen an.
„Autonom“ bedeutet: Während des Spiels steuert kein Mensch den Roboter. Der Roboter entscheidet selbst, wohin er läuft, wann er schießt und wem er ausweicht.
Ein großer Erfolg aus dem Vorjahr: Beim RoboCup 2025 in Salvador, Brasilien, gewann Boosted HTWK von der HTWK Leipzig die Humanoid League Kid Size. Das Finale gegen TH-MOS endete laut heise deutlich mit 11:0. In der Adult Size gewann Tsinghua Hephaestus.
Tabelle: Sieger der Humanoid League in den letzten Jahren
| Jahr | KidSize-Sieger | AdultSize-Sieger |
| 2025 | Boosted HTWK | Tsinghua Hephaestus |
| 2024 | CIT Brains | RoMeLa UCLA |
| 2023 | Rhoban FC | NimbRo AdultSize |
| 2022 | CIT Brains | NimbRo AdultSize |
| 2021 | Starkit | Sweaty |
Quellen: offizielle Ergebnislisten der RoboCup Humanoid League. https://humanoid.robocup.org/robocup-2025/schedule-and-results-rc-hl-2025/
Die größten Herausforderungen
Die erste große Aufgabe ist das Laufen. Menschen rennen, stoppen und drehen sich fast automatisch. Für einen Roboter ist jeder Schritt eine Rechenaufgabe. Der Boden kann rutschen, ein Gegner kann stoßen, und schon liegt der Roboter auf dem Rücken.
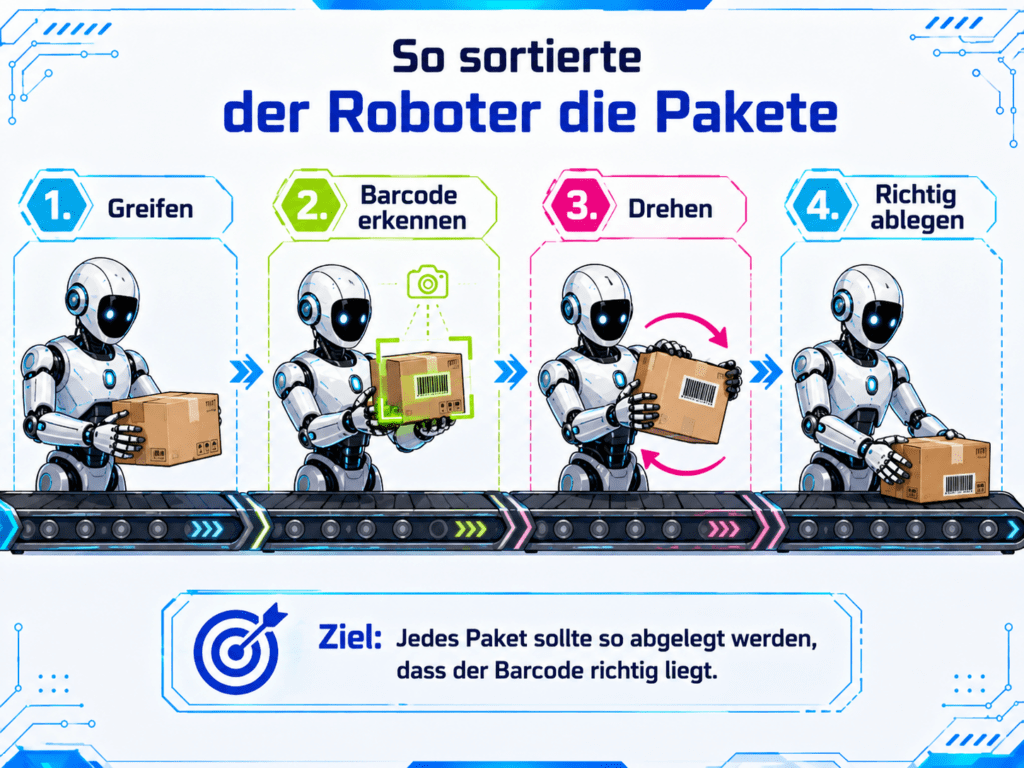
Die zweite Aufgabe ist das Sehen. Ein Roboter bekommt Kamerabilder und muss daraus erkennen: Wo ist der Ball? Wo ist das Tor? Wer ist Mitspieler, wer Gegner? Für dich ist das selbstverständlich. Für eine Maschine ist es knifflig.
Die dritte Aufgabe ist Teamarbeit. Ein guter Fußballer erkennt Räume, täuscht Gegner und spielt im richtigen Moment ab. Roboter müssen solche Entscheidungen mit Sensoren, Algorithmen und Funkverbindungen treffen.
Und dann kommt noch die vierte Aufgabe: Tempo. Profifußballer reagieren blitzschnell. Roboter sind zwar besser geworden, aber oft noch langsamer, vorsichtiger und weniger kreativ.

Wie wahrscheinlich ist das Spiel 2050?
Ein Showspiel gegen den amtierenden Weltmeister im Jahr 2050 halte ich für gut möglich. Dass ein humanoides Roboterteam dann wirklich gewinnt, ist schon viel schwieriger. Bis 2050 sind es noch 24 Jahre. In dieser Zeit werden Motoren, Batterien, Kameras und Künstliche Intelligenz viel besser werden. Trotzdem ist Fußball nicht nur Rechnen. Es geht um Körpergefühl, Überraschung, Mut und blitzschnelle Ideen.
Meine Einschätzung: Ein offizielles Spiel 2050 ist realistisch. Ein Sieg der Roboter ist möglich, aber nicht sicher – vielleicht eher eine Außenseiterchance.
Fazit
Der RoboCup ist mehr als Roboterfußball. Er ist ein riesiges Forschungslabor für die Zukunft. Was dort gelernt wird, kann später Rettungsrobotern, Assistenzrobotern oder Robotern im Alltag helfen.
Vielleicht schlagen Roboter 2050 noch nicht den Weltmeister. Aber sie werden bis dahin sehr viel besser darin sein, unsere Welt zu sehen, zu verstehen und sich darin zu bewegen.
FuxFun
Wusstest du, dass 2025 ein deutsches Team Roboter-Fußballweltmeister wurde? Boosted HTWK aus Leipzig gewann die humanoide KidSize-Klasse – und im Finale fielen ganze 11 Tore für die Leipziger Roboter.
Quellenverweis
Quellen: FIFA, Reuters, RoboCup Federation, RoboCup Humanoid League, Humanoid Soccer League und heise. Besonders wichtig sind die offiziellen RoboCup-Ergebnislisten und die HSL-Erklärung zur Zusammenlegung der bisherigen Ligen.
Buchempfehlung
Noch mehr über Roboter und Künstliche Intelligenz erfährst du im Buch „Roboter & KI“ aus der SchlauFUX-Reihe vom Kosmos Verlag – für junge Entdeckerinnen und Entdecker ab 8 Jahren.
https://amzn.to/4oL1232