Igus igumania game. Build your own Mars Rover assembling automation factory and improve it with @igusgmbh products. Enjoy this new game soon in your Webbrowser and on other plattforms. Get to know Rusty the robot and Dave the igus employee while learning about igus smart plastics products and low cost Automation. I really enjoyed playing this game, mainly for one reason: robots 😉
Als Produktionsleiter einer eigenen Mars Rover-Fabrik kann nun jeder spielerisch in die Welt der motion plastics von igus eintauchen
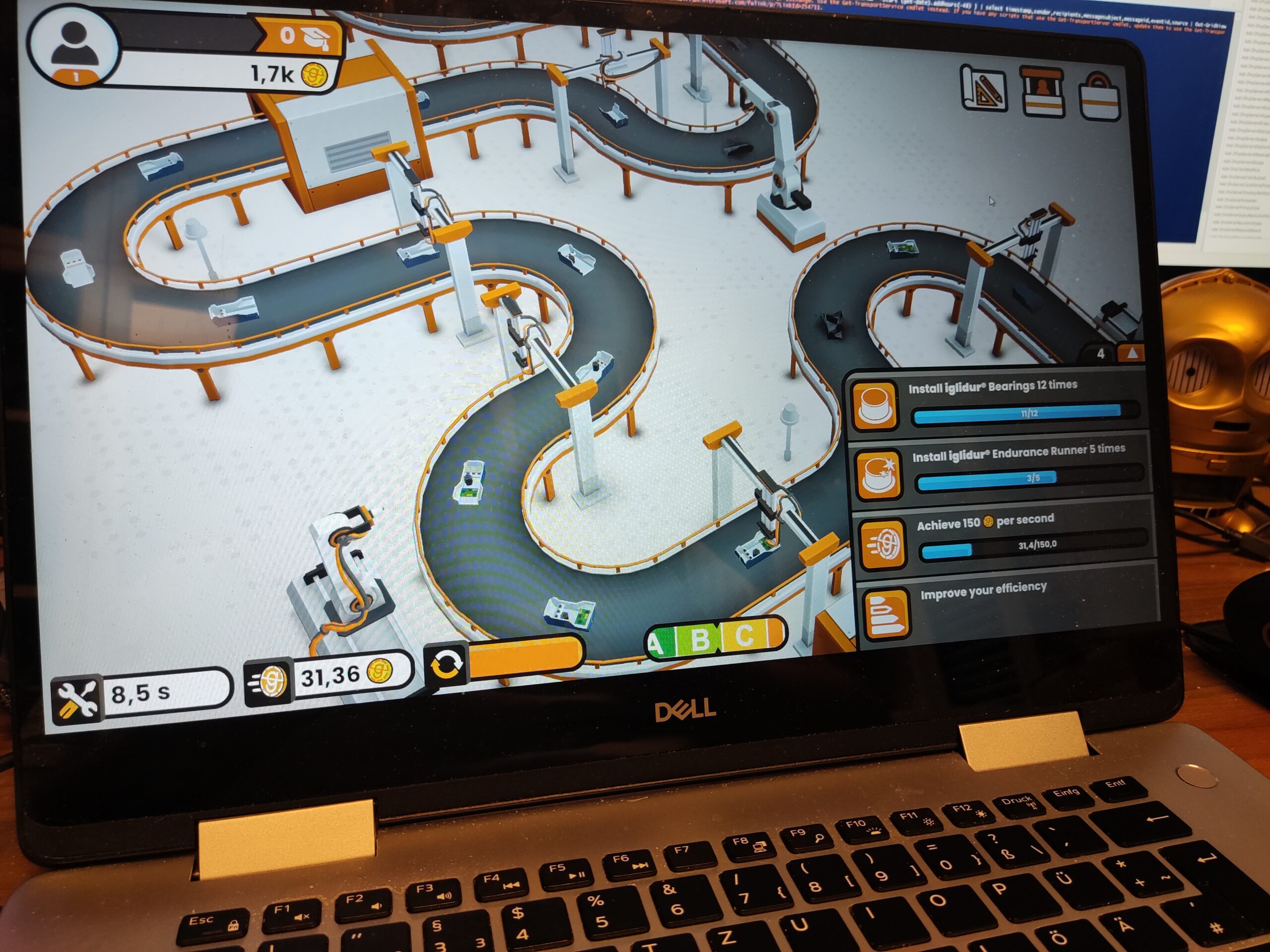
Köln, 20. Juli 2022 – Ungeplante Wartungszeiten und Produktionsstillstände gehören zu den größten Gegnern für Industrieunternehmen. Der motion plastics Spezialist igus bietet nun jedem die Möglichkeit, selbst zum Produktionsleiter zu werden und sich dieser Herausforderung zu stellen – mit dem Online-Browser-Spiel igumania. Das Idle-Game wurde mithilfe der Spiele-Plattform Unity entwickelt und ermöglicht Spielern, in die Welt der motion plastics einzutauchen. Durch den Einbau von igus Produkten können die Wartungszeiten der Produktion reduziert werden, damit Maschinenstillstände auch im Spiel der Vergangenheit angehören. Das Unternehmensziel von igus ist auch Ziel des Spiels: Verbessern, was sich bewegt.
Als frisch gebackener Produktionsleiter einer Mars-Rover-Fabrik gegen die vielen ungeplanten Wartungen und Anlagenstillstände in der Produktion ankämpfen. Dieses Szenario erwartet Spieler im Online-Spiel igumania. Unterstützung erhält man von Rusty, dem treuen Roboter-Assistenten, und Dave, dem igus Mitarbeiter aus dem technischen Vertrieb, dessen Besuch der Startschuss für die gemeinsame Erfolgsstory mit motion plastics ist. Im Laufe des Spiels können verschiedene igus Produkte verbaut werden: iglidur Gleitlager, Energieketten, flexible chainflex Leitungen, drylin Linear- und Antriebstechnik und sogar komplette Low-Cost- Automation-Lösungen wie der ReBeL Serviceroboter. Am Anfang stehen jedoch noch nicht alle motion plastics Lösungen zur Verfügung. Diese können im Spielverlauf über den Technologiebaum des igus Labors freigeschaltet werden. Auch die real-virtuelle igus motion plastics show (IMPS) können Spieler als Ingame-Messe erleben und so noch mehr über die motion plastics Produkte erfahren. Durch das Erfüllen verschiedener Aufgaben können weitere Perks bzw. Vorteile und Produkte freigeschaltet werden – ob e-ketten Recycling, Erweiterung der Montagelinie, Beschleunigung des Fließbandes, oder der Einsatz von smart plastics für die automatische Wartung der eingesetzten Roboter.
Gamification-Ansatz für mehr Nutzerfreundlichkeit
Aber warum ein eigenes igus Spiel? „Entstanden ist die Idee aus der Überlegung, wie wir unsere Produkte aus Hochleistungskunststoffen und ihre Alleinstellungsmerkmale noch erlebbarer machen können – und das auf ganz einfachem und spielerischem Weg“, erklärt igus Geschäftsführer Frank Blase. igus folgt dabei dem Prinzip des „Serious Gaming“: Das Online-Spiel soll nicht nur unterhalten, sondern spielerisch Wissenslücken schließen und die Vorteile der igus Hochleistungskunststoffe vermitteln. „Wir haben ein gutes Knowhow im Software-Bereich und bieten bereits jetzt zahlreiche Online-Tools an – vom Produkt-Lebensdauerrechner über den 3D-Druck-Service bis hin zum Konfigurator für Portalroboter. Hier setzen wir bereits auf den Gamification-Ansatz, indem wir zum Beispiel auch für unseren Konfigurator für Portalroboter die Plattform von Unity nutzen, um so eine spielend leichte Bedienbarkeit zu ermöglichen. Diesen Ansatz wollen wir weiterentwickeln und unser gesamtes Online-Angebot künftig noch spielerischer und nutzerfreundlicher gestalten. Ein eigenes Online-Spiel bietet die optimale Möglichkeit, wertvolle Erfahrungen im Bereich Gamification zu sammeln.“
Spielentwicklung: Vom Studentenprojekt zur Unternehmensgründung
Für die Entwicklung eines eigenen Online-Spiels hat sich igus das Cologne Game Lab an seine Seite geholt – ein Institut an der Technischen Hochschule Köln, dessen Studentenprojekte unter anderem bereits mit dem Deutschen Computerspielpreis ausgezeichnet wurden. Im Rahmen eines eigenen igus Studentenprojekts haben sich 10 Studententeams der Herausforderung gestellt. Die Aufgabe: Innerhalb einer Woche ein Konzept für ein igus Spiel zu entwickeln. Gewonnen hat das Konzept für „igumania“ und das Gewinner-Team bekam den Zuschlag für die Entwicklung des Spiels. Das Besondere: Aus dem Studentenprojekt wurde eine Unternehmensidee, und so gründeten Arkadijs Gribacovs, Ethem Kurt und Leonard Liebler die elads gbR für Spieleentwicklung. „In Deutschland gibt es nach wie vor verhältnismäßig wenig Unternehmer. Dass wir mit unserer Idee den Unternehmergeist junger Talente wecken und den Anstoß für eine Unternehmensgründung geben konnten, freut uns umso mehr“, macht Frank Blase deutlich. Und die Entwicklung von igumania läuft weiter: Nachdem erste Erfahrungswerte gesammelt und Optimierungen umgesetzt wurden, ist auch der Launch einer App-Version für Android und iOS geplant.
fruitcore robotics aus Konstanz zeigt auf der automatica 2022 sein Robotik-Angebot rund um die drei einfach zu bedienenden und auch für kleine und mittlere Unternehmen erschwinglichen Digital Robots HORST. Im Mittelpunkt des Messeauftritts steht die neue Komplettlösung horstCUBE plug & play für die flexible Teilevereinzelung. Auf der Leitmesse für intelligente Automation und Robotik in München präsentieren Aussteller:innen vom 21. bis 24. Juni ihre Vision einer neuen Generation von smarten Robotern. Dass diese auch für sehr viele Mittelständler interessant werden, belegt eine aktuelle Umfrage: 46 Prozent der Unternehmen mit 50-500 Mitarbeiter:innen wollen sich Roboter ins Haus holen. fruitcore robotics stellt in Halle B4 am Stand 400 aus.
Mit seinen drei HORST-Systemen bringt fruitcore robotics das Potenzial der Robotik in alle Bereiche der Wirtschaft, weit über die Produktionsstraßen im Automobilbereich hinaus. Die Neuheit horstCUBE plug & play senkt die Einstiegshürden zur Automatisierung und Digitalisierung für kleine und mittlere Unternehmen nun weiter. Anwender:innen können die Komplettlösung direkt einsetzen, um ihre flexible Teilevereinzelung von Schüttgut mittels Kameraerkennung und Bauteilvereinzeler schnell und effizient zu automatisieren. Die Komplettlösung basiert auf der Roboterplattform horstCUBE und ist bereits mit allen Komponenten ausgestattet, die für diese Anwendung notwendig sind. Weitere Prozessschritte, wie Teile-Ausgabe, Teile-Prüfung, Teile-Sortierung oder Teile-Beschriftung können einfach und ohne großen Zeitaufwand umgesetzt werden. horstCUBE wird von fruitcore robotics auch als Einzelprodukt angeboten, denn die flexible Roboterplattform bietet die optimale Basis, um verschiedenste Anwendungen mit den Robotern von fruitcore robotics einfach und sicher zu realisieren.
Steuerung und Software wichtige Bestandteile der HORST-Systeme
Mit HORST-Systemen können ganze Anwendungen wie beispielsweise horstCUBE plug & play intuitiv und einfach gesteuert werden. Verschiedenste Komponenten wie Greifer, CNC-Anlagen oder Sicherheitssysteme werden zentral mit der Bediensoftware horstFX intelligent und stärker als in der Branche üblich vernetzt. „Roboter sind längst sehr viel mehr als nur ein Stück nützlicher Hardware“, so Jens Riegger, CEO und Mitgründer von fruitcore robotics. „Der Großteil der Wertschöpfung lässt sich über intelligente Software erzielen, Roboter werden zu Digital Robots. Jede Person, die ein Smartphone bedienen kann, ist auch in der Lage unsere HORST-Systeme über ihre Software horstFX samt digitalem Zwilling zu bedienen. Damit werden unsere Digital Robots gerade auch für den Mittelstand immer interessanter – auch, weil wir sie zu einem bezahlbaren Preis anbieten können.“
Eine neue Kategorie etabliert sich
Digital Robots vereinen modernste Robotik-Hardware mit intelligenter und intuitiver Software. Sie lassen sich einfach und ohne Vorkenntnisse mittels grafischer Bedienkonzepte einrichten und bedienen. Updates und Upgrades erhalten sie over-the-air, wodurch ihr Nutzen über die Lebensdauer ausgeweitet werden kann. Digital Robots bieten einen einfachen und schnellen Einstieg in die Automatisierung und Digitalisierung, der sich im Idealfall schnell amortisiert. Drei Aspekte zeichnen Digital Robots insbesondere aus: die intuitive Bedienung samt digitalem Zwilling, eine IIoT-Plattform, über die der digitale Zwilling des Roboters mit seiner direkten Umgebung verbunden werden kann sowie offene Schnittstellen, die eine Einbindung in Systeme erlauben, die weit über die direkte Umgebung hinaus gehen, z.B. ERP-Systeme.
Umfrage im Mittelstand: Nachfrage, Hoffnungen, Tipps fürs Management
Fast die Hälfte der deutschen Mittelständler (46 % in Betrieben mit 50-500 Mitarbeiter:innen) plant, sich Roboter ins Haus zu holen, 14 Prozent haben schon welche. Das hat eine Umfrage unter mehr als 1.000 deutschen Fach- und Führungskräften ergeben*. Die Mehrheit (66 %) sagt, dass es nun „höchste Zeit“ sei, dass auch manuelle Arbeit bei Digitalisierungsplänen priorisiert würde. Viele Fachkräfte erhoffen sich Verbesserungen im Alltag, zum Beispiel eine Verringerung der repetitiven Tätigkeiten, Qualitätsverbesserungen oder die Aussicht, weniger mit gefährlichen Substanzen arbeiten zu müssen. Fast ein Drittel sagt zudem, ihr Job würde interessanter werden (27 %) und sie würden Stolz empfinden, mit High Tech zu arbeiten (26 %). Begleitmaßnahmen der Einführung: Am wichtigsten sind den Befragten Trainings und Upskilling-Programme (34 %) sowie Mitsprache, welche Aufgaben an Roboter übergeben werden (29 %).
* Methodik
fruitcore robotics beauftragte die Marktforscher von Sapio Research mit der Befragung von Fach- und Führungskräften in Deutschland. 1005 Fach- und Führungskräfte aus Deutschland nahmen an der Umfrage teil. Die Auswahl fokussierte sich auf Fach- und Führungskräfte, die nicht vorwiegend im Büro arbeiten, sondern v.a. manuelle Arbeit verrichten oder manuelle Arbeit planen und/oder beaufsichtigen. Bei mehr als 30 Prozent der Befragten in Deutschland (322 Personen) handelt es sich um Produktionsleiter:innen. Die Umfrage wurde Anfang April 2022 durchgeführt.
Einen Blick in die »Blackbox« werfen und Künstliche Intelligenz (KI) selbst programmieren – das ermöglichen das Fraunhofer-Institut für Intelligente Analyse- und Informationssysteme IAIS, das Ministerium für Schule und Bildung des Landes Nordrhein-Westfalen, die Universität zu Köln und die InterScience-Akademie für Algorithmik. Nach der Einführung des Pflichtfachs Informatik zum Schuljahr 2021/22 in NRW hat auch KI einen festen Platz im Unterricht für die Sekundarstufe I in den Klassen 5 und 6. In dem Zuge können die Schüler*innen in NRW, aber auch darüber hinaus, auf der Fraunhofer-Programmierplattform »Open Roberta Lab« künftig Künstliche Neuronale Netze selbst programmieren und testen. Ab Sommer 2022 bietet das Fraunhofer IAIS jungen Menschen weltweit einen einmaligen Zugang zur KI.
Künstliche Intelligenz ist eines der bedeutendsten und zugleich kritischsten Zukunftsthemen. Sie findet schon heute in zahlreichen Bereichen unseres Alltags Anwendung, zum Beispiel bei Gesichtserkennung, automatischer Textergänzung, Sprachassistenten, personalisierter Werbung, Übersetzungsprogrammen und Gesundheits-Apps. Um den Schülerinnen und Schülern einen praxisnahen Einstieg in diese Thematik zu erleichtern, fördert das Ministerium für Schule und Bildung des Landes Nordrhein-Westfalen die Entwicklung von KI-Lerninhalten und Materialien im Rahmen des Projekts »KI-Algorithmen im Informatikunterricht« seit September 2021.
Mit dieser Unterstützung hat das Fraunhofer-Institut für Intelligente Analyse- und Informationssysteme IAIS erstmals Künstliche Neuronale Netze auf seiner Programmierplattform Open Roberta integriert. In dem Projekt arbeiten Fraunhofer und die Universität zu Köln zusammen, um die Schulen bei der Unterrichtsentwicklung im Bereich der KI zu unterstützen. Initiator des Projekts ist Prof. Dr. Ulrich Trottenberg, der die Projektpartner ehrenamtlich unterstützt.
Staatssekretär Mathias Richter vom Ministerium für Schule und Bildung des Landes Nordrhein-Westfalen: »Vor dem Hintergrund der rasant steigenden Bedeutung von Künstlicher Intelligenz in der Lebens- und Arbeitswelt ist es dringend geboten, möglichst früh Kompetenzen im Bereich Künstliche Intelligenz und Maschinelles Lernen aufzubauen. Wir wollen es unseren Schülerinnen und Schülern ermöglichen, ihre eigene Zukunft mitzugestalten, denn die Auswirkungen von KI machen sich zunehmend bemerkbar. Ich danke allen am Projekt Beteiligten herzlich für ihre Unterstützung zur Stärkung der informatischen Bildung in Nordrhein-Westfalen insbesondere im Bereich der KI.«
Künstliche Intelligenz erhält einen festen Platz im Informatikunterricht
KI wird oft als komplexe Technologie wahrgenommen, die nur von Fachleuten verstanden und gestaltet werden kann. Dabei können Kompetenzen in diesem Teilgebiet der Informatik schon in der Schule altersangemessen vermittelt werden. Deshalb hat seit der Einführung des Pflichtfachs Informatik in Klasse 5/6 aller weiterführenden Schulen zum Schuljahr 2021/22 in NRW auch der Bereich Künstliche Intelligenz einen festen Platz im Informatikunterricht. Hier werden unter anderem Anwendungsbeispiele von KI aus der Lebenswelt der Schülerinnen und Schüler thematisiert sowie Grundprinzipien des Maschinellen Lernens altersgerecht vermittelt.
Im Rahmen des Projekts wird die bereits weit verbreitete Open-Source-Programmierumgebung Open Roberta Lab des Fraunhofer IAIS insbesondere um die Integration Künstlicher Neuronaler Netze (KNN) erweitert, um KI-Algorithmen durch grafische Programmierung intuitiv erleb- und verstehbar zu machen. Ziel ist es, dass Schülerinnen und Schüler ab den Klassen 5 und 6 verstehen, was ein Künstliches Neuronales Netz ist, wie es funktioniert und wie sie selbst ein KNN programmieren können, welches zum Beispiel einem Roboter ermöglicht, sich selbstständig in seiner Umwelt zu bewegen. Dabei steht im Vordergrund, dass die grundlegenden Prinzipien eines KNN verstanden und selbst umgesetzt werden können.
Praxisnaher Blick in die »Blackbox«
Thorsten Leimbach, Leiter der Roberta-Initiative und des Geschäftsfelds Smart Coding and Learning am Fraunhofer IAIS: »Üblicherweise wird KI – wenn überhaupt – in der Schule als eine Art Blackbox-Anwendung behandelt. Als eines der führenden Wissenschaftsinstitute auf den Gebieten KI und Maschinelles Lernen freuen wir uns, gemeinsam mit dem Schulministerium NRW und unseren Projektpartnern einen praxisnahen Blick in diese Box zu ermöglichen. Künstliche Neuronale Netze werden zu einem begreifbaren Element, das Schülerinnen und Schüler selbst programmieren können. Sie nähern sich so den Themen Maschinelles Lernen und KI auf innovative Weise.«
Neben dem Fraunhofer IAIS ist das Institut für Mathematikdidaktik (IMD) unter Leitung von Prof. Dr. Inge Schwank am Projekt beteiligt. Das IMD widmet sich der Frage, wie die KI-Thematik für alle Schulformen aufbereitet werden kann. Weiterhin beteiligt sind das Department Mathematik/Informatik (DMI) der Universität zu Köln sowie die InterScience-Akademie für Algorithmik (ISAFA), die das Projekt initiiert hat und ehrenamtlich unterstützt.
Die KNN-Integration als Bestandteil des Open Roberta Labs soll ab Sommer 2022 für alle Schulen und Interessierte weltweit unter https://lab.open-roberta.org verfügbar sein. Lehrkräfte und weitere Messebesucher*innen können auf der didacta 2022 (am Mittwoch und Samstag) am Stand des Schulministeriums NRW bereits einen ersten Einblick erhalten.
Auf der Hannover Messe 2022 stellt igus den ersten Prototypen eines humanoiden Low Cost Roboters vor
Köln, 27. Mai 2022 – Mensch, Maschine – oder beides? Humanoide Roboter sind längst nicht mehr nur Science-Fiction, sondern Realität. Auch igusforscht bereits seit einiger Zeit an humanoider Robotik und stellt nun auf der Hannover Messe einen Prototypen des motion plastics bot vor: ein humanoider Roboter, der die Vorteile von Hochleistungskunststoffen und Low Cost Automation vereint.
Roboter sind aus unserem Alltag nicht mehr wegzudenken. Spätestens seit dem Wandel zur Industrie 4.0 werden immer mehr Aufgaben automatisiert – und davon profitieren auch neue Formen der Robotik. Doch Roboter können nicht nur in der Industrie, sondern auch im Alltag für Erleichterung sorgen. Ein Humanoid, der nicht nur funktionell, sondern auch freundlich ist und menschliche Züge trägt, kann den Menschen nicht als Maschine, sondern als Partner begleiten. In der Forschung und Entwicklung von humanoider Robotik gibt es stetig Fortschritte. Zum Beispiel bei einem Forschungsteam der TU Chemnitz, das eine E-Skin entwickelt – eine berührungsempfindliche elektronische Haut, die humanoide Roboter noch menschenähnlicher machen könnte. Immer getrieben von der Frage, in welche Richtung sich die Robotik weiterentwickeln kann, arbeitet auch igus seit einiger Zeit an der eigenen Vision eines humanoiden Roboters – dem motion plastics bot. „Mit dem igus ReBeL und unserem drytech Angebot waren bereits passende Komponenten vorhanden, um Bewegung in einen Roboter zu bringen. Der humanoide Roboter ist ein gemeinsames Projekt mit den Robotik-Experten des Stuttgarter Start-ups TruPhysics, das den intelligenten Humanoiden aus unseren motion plastics sowie weiteren Komponenten zusammengebaut hat. Dort ist er unter dem Namen Robert M3 erhältlich”, erklärt Alexander Mühlens, Leiter Geschäftsbereich Automatisierungstechnik und Robotik bei igus. „Mit dem Bot wollen wir das Zusammenspiel von unseren Produkten aus Hochleistungskunststoffen und integrierter Intelligenz aufzeigen – und das zu einem erschwinglichen Preis.“
Leichter und wartungsfreier Low Cost Humanoid
Für eine lange und störungsfreie Laufzeit ohne Wartung bieten die Tribo-Polymere von igus im motion plastics bot einen klaren Vorteil: Schmiermittelfreiheit. Gleichzeitig ermöglichen die Hochleistungskunststoffe eine leichte Bauweise. Durch ihren Einsatz bringt der motion plastics bot bei einer Höhe von bis zu 2,70 Meter lediglich 78 Kilogramm auf die Waage. Seine Spannweite beträgt 1,50 Meter. Der motion plastics bot verfügt über ein selbstfahrendes AGV (Automated Guided Vehicle), einen teleskopierbaren Körper sowie einen Kopf mit integriertem Bildschirm und Avatar für eine interaktive Kommunikation. Zentraler Bestandteil ist auch der igus ReBeL, ein Serviceroboter mit Cobot-Fähigkeiten, der als Arme des Bots zum Einsatz kommt. Das Herzstück des ReBeLs sind die vollintegrierten Tribo-Wellgetriebe aus Kunststoff mit Motor, Absolutwert-Encoder, Kraftregelung und Controller. Der motion plastics bot bewegt sich in Schrittgeschwindigkeit und verfügt über eine Traglast von 2 Kilogramm pro Arm. Angesteuert wird er als Open Source-Lösung über das Robot Operating System (ROS). Denn das gesamte Low Cost Automation-Angebot von igus lässt sich in ROS abbilden. Mit der Studie zum motion plastics bot vereint igus die Vorteile seiner Hochleistungskunststoffe für die Bewegung und sein Know-how im Bereich Low Cost Automation, um die Entwicklung der nächsten Robotergeneration weiter voranzutreiben.
Lebenslanger Begleiter statt nur Maschine
„Wir sehen viel Potenzial im Einsatz von humanoiden Robotern. Doch unsere Welt ist von Menschen für Menschen gebaut. Statt nur einzelne Automatisierungsteile zu nutzen, ist es daher sinnvoll an Humanoiden und Androiden zu forschen. Die Frage ist, wann ist der Markt soweit?“, macht Alexander Mühlens deutlich. Menschenähnliche Roboter können sowohl gefährliche als auch einfache und monotone Aufgaben übernehmen.Im beruflichen Umfeld können Arbeiten erledigt werden, die über ein bloßes Pick & Place, wie es Roboterarme verrichten, hinausgehen. Im Haushaltsbereich kann ein Bot mehrere Roboter ersetzen: Er könnte selbstständig staubsaugen, Rasen mähen, Einkäufe erledigen, kochen, Wäsche waschen und darüber hinaus alle möglichen Aufgaben erledigen – selbst die Pflege von kranken Menschen. Somit wäre er nicht nur eine Maschine, sondern ein Begleiter, der für eine Menschenleben lange Erleichterung sorgen könnte. „Der Einsatz eines solchen Roboters ist bisher noch mit hohen Kosten verbunden, berücksichtigt man jedoch die mögliche Lebensdauer, würde sich der Einsatz längerfristig amortisieren”, sagt Mühlens. „Unser Ziel ist es, mit motion plastics Komponenten kostengünstige und einfache Lösungen für humanoide Robotik aufzuzeigen.”
Waldachtal, 11.05.2022 Mit dem neuen Schulbaukasten First Coding von fischertechnik lassen sich einfache Roboterprogrammierungen durchführen. Schülerinnen und Schüler der Primarstufe eignen sich die Grundprinzipien der Robotik und Informatik an. Der Baukasten enthält umfangreiche Beschreibungen zum Thema und einfache Übungsaufgaben.
Mit dem neuen Schulbaukasten First Coding von fischertechnik lassen sich einfache Roboterprogrammierungen durchführen. Schülerinnen und Schüler der Primarstufe eignen sich die Grundprinzipien der Robotik und Informatik an. Der Baukasten enthält umfangreiche Beschreibungen zum Thema und einfache Übungsaufgaben.
Insgesamt können mit fischertechnik First Coding drei unterschiedliche Robotermodelle gebaut werden. Der Baukasten enthält alles, was voll funktionsfähige Fahrroboter benötigen: Bausteine zum Zusammenbauen, ein komplett fertig aufgebautes Chassis mit Motoren, Steuerung und Infrarotsensor sowie Taster und Batteriefach. Komplexe Verkabelungen sind nicht notwendig.
Mit seinen altersgerechten Aufgabenstellungen wertet First Coding jeden Grundschulunterricht auf und vermittelt spielerisch die Funktionsweise einfacher Programmierungen. Sind die kleinen Roboter einmal zusammengebaut, können sie zum Beispiel auf dem mitgelieferten Parcours Bahnen abfahren. Die Befehle wurden zuvor am Tablet oder im Smartphone programmiert. Die Roboter können ebenso über die fischertechnik App ferngesteuert werden oder über eine Teach-In-Funktion zuvor gespeicherte Wege befahren und lassen sich per Bluetooth mit dem Smartphone oder dem Tablet verbinden. Die Programmieroberfläche ist altersgerecht aufbereitet und entsprechend einfach zu bedienen. Es gilt dabei, einzelne Programmiersteine aneinanderzureihen und darüber den Roboter zu steuern. Soundeffekte und eine Steuerung über Geräusche runden das Konzept ab.
Umfangreiches Lehrmaterial und Erläuterungen zum Thema sowie elf verschiedene Aufgabenstellungen bilden eine komplette Basis für einen erfolgreichen Unterricht.
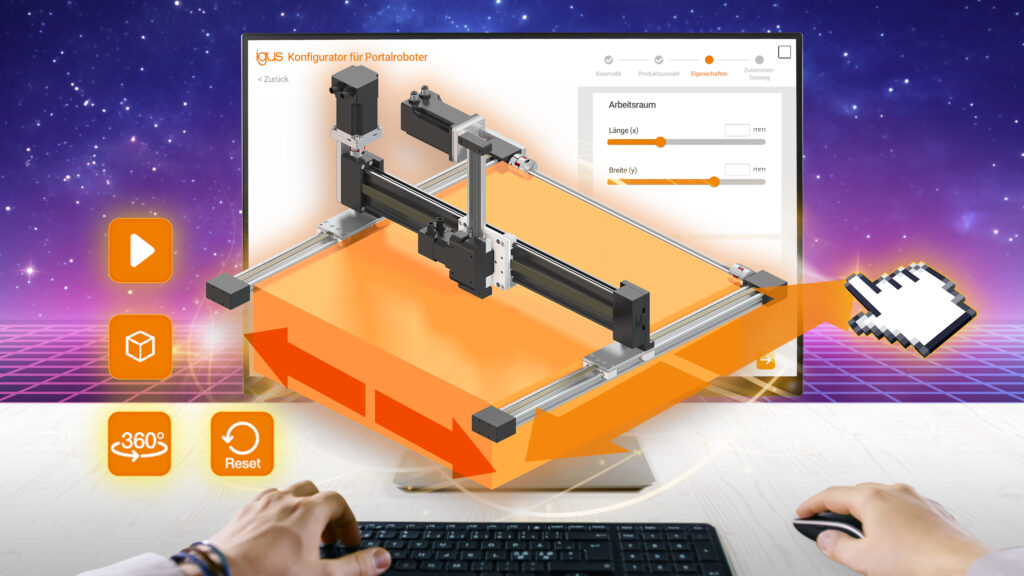
Gamification-Ansatz und zusätzliche Features machen Online-Konfigurator für Low-Cost-Portalroboter noch intuitiver
Köln, 5. Mai 2022 – Der motion plastics Spezialist igus hat seinem Online-Konfigurator für Low-Cost-Portalroboter mithilfe der Spiel-Engine Unity ein Facelift spendiert und die Bedienung dadurch noch effizienter gemacht. Ab sofort können Anwender noch schneller und leichter einen individuellen Portalroboter anschlussfertig konfigurieren – in nur 5 Minuten und mit Live-Preisauskunft. Mithilfe der Online-Tools kann jede Automatisierungslösung auch direkt im ausgewählten Arbeitsraum programmiert und getestet sowie die CAD-Daten und eine passende Zeichnung geladen werden. Selbst kleine und mittelständische Unternehmen können so barrierefrei in die Welt der Automation eintauchen – ohne Know-how von Fachkräften und CAD-Software.
Effizienz steigern, Fehler reduzieren und Kosten senken: Viele Unternehmen haben die Vorteile der Prozessautomatisierung längst erkannt. Doch die Auswahl des richtigen Roboters kann zeitintensiv sein – und Zeit ist bekanntlich Geld. Um den Einstieg in die Automatisierung noch leichter zu machen, hat igus im vergangenen Jahr einen Online-Konfigurator entwickelt. Mit wenigen Klicks können so auch Laien anschlussfertige Low-Cost-Portalroboter basierend auf gleitenden drylin Linearführungen ganz einfach konfigurieren. Linearroboter sind ohne Steuerung ab 1.000 Euro pro Stück erhältlich, mit Steuerung und Software ab circa 4.000 Euro. „Seit dem Start des Konfigurators haben wir viel positives Feedback zum Gamification-Ansatz und der intuitiven Bedienbarkeit bekommen“, sagt Alexander Mühlens, Leiter Geschäftsbereich Automatisierungstechnik und Robotik bei igus. „Nichtsdestotrotz haben wir uns gefragt: Können wir die Bedienung mit diesem Feedback weiter verbessern? Die Antwort war ein klares Ja. Daher haben wir den Konfigurator weiter optimiert und neue Funktionen hinzugefügt.“
Individuellen Roboter konfigurieren – jetzt noch leichter durch Spiele-Plattform
Für das neue Design des Konfigurators haben die igus Entwickler Unity genutzt – eine Plattform, die bei der Entwicklung von Spielen für PC und Spielekonsolen zum Einsatz kommt. Entsprechend intuitiv ist die Bedienung des Konfigurators. Und die funktioniert wie folgt: Im ersten Schritt wählt der Anwender die Kinematik, also ein Linien-, Flächen- oder Raumportal. Die Optik erinnert dabei an ein Auswahlmenü aus einem Computerspiel, über das Spieler beispielsweise Rennwagen wählen. Mit diesen Standardkonfigurationen lässt sich bei klaren Rahmenbedingungen schnell der richtige Roboter auswählen. Darüber hinaus gibt es erstmalig die Möglichkeit, ein Sonderportal zusammenzustellen und anzufragen. Ob Eismaschine, Vermessungssystem oder Palettierroboter: Viele Anwendungen müssen spezielle Sicherheitsbestimmungen erfüllen, spritzwassergeschützt sein oder arbeiten zum Beispiel in besonders kleinen Bauräumen. Der Online-Konfigurator ermöglicht Anwendern, ein Sonderportal anzufragen, das den speziellen Anforderungen ihrer ganz individuellen Anwendung gerecht wird.
3D-Modell visualisiert Bauraum und Bewegungen des Portals
Der nächste Schritt: die Konfiguration des Portals. Hier stehen Schieberegler zur Verfügung, über die sich die Hublängen der X-, Y- und Z-Achse millimetergenau einstellen lassen. Ein dynamisches 3D-Modell des Portals, das sich in alle Richtungen drehen lässt, visualisiert dabei die Einstellungen in Echtzeit. „An dieser Stelle haben wir eine neue Funktion eingefügt“, freut sich Mühlens. „Mit einem Klick ist es nun möglich, auch den Bauraum des Portals darzustellen. Hierfür nutzen wir farbige Flächen. Somit gewinnen Anwender einen visuellen Eindruck davon, wie viel Platz ihre Automationslösung beansprucht.“ Um auch Transparenz in Sachen Kosten zu gewährleisten, erhalten Nutzer zudem eine Live-Anzeige des Preises ihrer Automationslösung. Fortgeschrittene Nutzer können das 3D-Modell auch als STEP-Datei exportieren und in einem beliebigen CAD-Programm weiterverarbeiten. Mit dem Online-Konfigurator ist es sogar möglich, Bewegungen des Roboters festzulegen – über die Eingabe weniger Parameter und ohne Programmier-Kenntnisse. „Wir folgen mit dieser Funktion dem Motto ‚Test before invest’. Bediener gewinnen dank des beweglichen 3D-Modells ein Gefühl für Roboterbewegungen und Taktzeiten“, so Mühlens. Nach der Online-Programmierung kann die Datei über eine App in Virtual Reality dargestellt oder in die echte Roboter-Steuerung geladen werden.
Online bestellt: Kurze Zeit später steht der Roboter vor der Tür
Sind Bediener mit der Konfiguration des Portals zufrieden, folgen die nächsten Schritte: Sie wählen eine passende Steuerung, die das Portal zu einer anschlussfertigen Low-Cost-Robotic Lösung komplettiert – ob ready-to-use mit igus robot control oder die Do-it-yourself Variante mit dryve D1-Steuerungskit. Kurze Zeit nach der Online-Bestellung steht die Automationslösung dann vor der Tür. Vormontierte Portale in Standardgrößen sind sogar innerhalb von 24 Stunden versandfertig. Ein weiteres Plus: Alle konfigurierbaren Portalsysteme sind durch die selbstschmierenden igus Polymere in allen Lagerstellen 100 Prozent wartungsfrei und sauber. Und zusätzliche Komponenten wie Greifer, Vision-Systeme, Motoren und Sensoren erhalten Automations-Novizen über den Low-Cost-Automation Marktplatz RBTX.