NSK is working to assist society by developing new service robot technology, including robotic devices for moving patients in medical settings. In October 2021, the company joined a Japanese government initiative to implement robotic technology in hospitals and help prevent the spread of Covid-19. NSK is now working to develop its robotic technologies further through dialogue with frontline medical staff.
New robots are currently in development around the world to assist humans and help solve societal issues. As part of this effort, NSK wants to create robots for use in settings where many people are moving around, including medical facilities and hospitals. The company’s smooth movement and low noise technologies are ideal for robotic applications in this field.
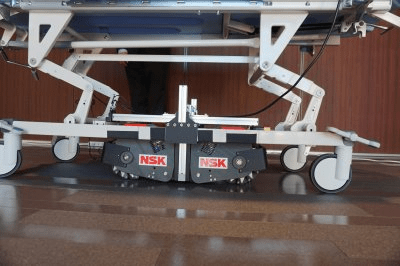
Among the candidates for development at the initial planning stage was an autonomous mobile robot. However, after observing the inner workings of a hospital, with its narrow corridors and high footfall rates, NSK concluded that a motorised assistance robot which could help staff during patient transfer would be a more useful contribution to workplace efficiency.
The company knew that its proposed robot could reduce the physical burden on medical staff and help facilitate work-style reform in the healthcare sector. Based on this approach, the company built a robotic prototype that helps staff to move heavy objects such as stretchers and trolleys in hospitals. As part of the Japanese government initiative, NSK is currently demonstrating the use of its motorised assistance robot at a major hospital. The end goal is eventual adoption by the healthcare sector for daily use.
NSK is focusing on essential user issues when developing the assist robot, deploying idea verification in short cycles. For example, rather than spending three years to develop the robot in its entirety, NSK is seeking feedback from customers every three months, implementing improvements incrementally during the development process.
The robot developed by NSK uses a motor drive that facilitates smooth starting and acceleration, as well as deceleration and tight turns. NSK ultimately wants to create a usable robot that fits user requirements, leveraging its know-how to aid people working in frontline healthcare. Innovative projects of this type support the company’s ethos of better meeting the needs of society, while simultaneously creating opportunities for new business growth.
motion plastics von igus mit intuitiver Software von Commonplace Robotics für einfache Lösungen in der Automatisierung
Köln, 29. September 2022 – Der motion plastics Spezialist igus investiert in den Ausbau seiner Aktivitäten in der Low Cost Automatisierung und hat jetzt die mehrheitlichen Anteile an Commonplace Robotics mit Sitz in Bissendorf bei Osnabrück erworben. Commonplace Robotics ist als Integrator spezialisiert auf intuitiv bedienbare Steuerung und Software sowie Leistungselektronik für die Robotik, sowohl im Industrie- als auch im Bildungsbereich. Beide Unternehmen arbeiten bereits seit sechs Jahren intensiv zusammen und haben unter anderem gemeinsam die igus Robot Control entwickelt, welche die Low Cost Kinematiken von igus aus Hochleistungskunststoffen ergänzt.
Vor 11 Jahren gründete Dr. Christian Meyer, bis dahin im Fraunhofer-Institut für Produktionstechnik und Automatisierung tätig, die Firma Commonplace Robotics. Der Name war Programm: Die Integration und Bedienung von Robotern so günstig und einfach machen, dass sie “commonplace” werden – also überall einsetzbar sind. Die ersten Produkte mit Steuerung und eigener Leistungselektronik waren Roboter für die Didaktik. 2016 trat Christian Meyer an igus heran, denn er stellte fest, dass die Roboter-Kinematiken von igus zu seiner Vision von “commonplace” passten: günstig, einfach, tauglich für die Industrie. Inzwischen haben die beiden Unternehmen gemeinsam Produkte wie die iRC igus Robot Control und den ReBeL Cobot sowie einen Aktuator entwickelt. Durch die hohe Fertigungstiefe von Commonplace Robotics – von Firmware und Software über Schaltschrankbau bis hin zur Platinenbestückung – können Neuentwicklungen schnell umgesetzt werden.
Mit gestärkter Innovationskraft die Low Cost Automation vorantreiben
„Viele Kunden sind überrascht, dass sie ohne Programmierkenntnisse einfache Roboteraufgaben schon in 30 Minuten realisieren können”, sagt Frank Blase, Geschäftsführer der igus GmbH. „Wir freuen uns sehr, dass nach der intensiven Zusammenarbeit der letzten sechs Jahre jetzt ein noch fokussierteres Vorgehen bei der Low Cost Automatisierung möglich ist.” Mit der Akquisition bündeln Commonplace Robotics und igus ihre Innovationskraft. Dr. Christian Meyer sagt: „Wir freuen uns auf spannende technologische Projekte mit igus. Gerade über die von igus betriebene Plattform RBTX für Low Cost Robotik kommen täglich neue Anforderungen von Kunden aus allen Bereichen der Industrie in unsere Labore. Vieles davon ist schnell umsetzbar, zumal wir mit der Investition expandieren werden.” Neuestes Produkt der Kooperation ist der ReBeL Cobot für 4.970 Euro inklusive Steuerung. Der Aktuator, auch als Einzelkomponente erhältlich, kombiniert das Kunststoff-Knowhow von igus im Getriebe mit der Leistungselektronik und Software von Commonplace Robotics. Der ReBeL kann mit sechs Achsen bis zu zwei Kilogramm Traglast bei einer Reichweite von 664 Millimetern handhaben – und das bei einem Eigengewicht von nur 8,2 Kilogramm. Anfragen und Bestellungen kommen einerseits aus klassischen Anwendungsgebieten wie der Qualitätskontrolle und Pick and Place- Anwendungen im Maschinenbau, und andererseits aus neuen Anwendungsgebieten wie der Restaurant-Automatisierung oder dem Urban Farming.
Auf der Motek in Stuttgart (Halle 7, Stand 7320 und 7321) und der SPS Messe in Nürnberg (Halle 4, Stand 310) können sich Interessierte live einen Eindruck der gemeinsam entwickelten Innovationen verschaffen.
Guest Article by Ellie Poverly - Ellie is an online journalist specializing in robotics and science research. She is also the Managing Editor at Revolutionized Magazine.
As of 2022, roughly 80% of the ocean remains a mystery. In fact, much of it hasn’t even been seen by humans yet. There have been more photographs of the Moon’s surface than the ocean floor.
Exploring the deepest parts of the ocean is an incredible challenge, complicated by intense pressures and complete darkness. Here’s a look at the robots that could finally reveal the secrets of Earth’s oceans.
The Limits of Human Exploration
Over half of the tallest mountain on Earth is underwater. The volcano Mauna Kea in Hawai’i is estimated to be around a mile taller than Mt. Everest from base to peak, although most of it is submerged. This massive volcano is just one of countless secrets hiding beneath the surface of Earth’s oceans.
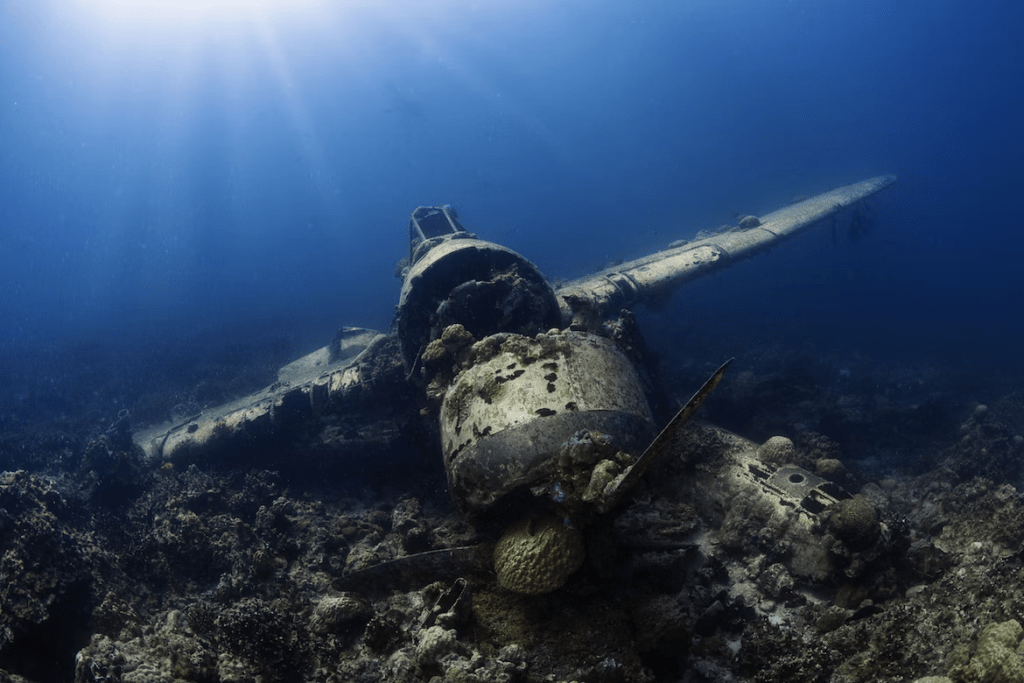
Other discoveries waiting underwater range from the wrecks of lost aircraft to the remains of sunken ships and even sunken cities, as well as life that looks like something from an alien world. Exploring the ocean floor could reveal groundbreaking archaeological, geological and biological discoveries. So, why haven’t humans started SCUBA diving down to the seabed?
Unfortunately, reaching the ocean floor is not easy, especially for humans. The deepest part of the ocean is the Mariana Trench, which extends 7 miles — or about 36,200 feet — deep. To put that into perspective, the world record for the deepest SCUBA dive is only 1,090 feet, set by diver Ahmed Gabr in 2014. Approximately 1,000 feet below sea level is considered the maximum depth humans can dive.
Luckily, humans have invented some amazing robots to help explore the ocean floor remotely.
The Robotic SCUBA Divers Exploring the Depths
A growing number of robotic SCUBA divers travel down to the deepest reaches of the ocean. Some look like mini submarines, while others are eerily human-like. These robots help scientists study a wide range of topics and may become even more crucial in the years ahead.
For instance, climate change increases the risk of food toxins on the surface. Could this be happening underwater as well? Additionally, the strange biology of deep-sea life could help researchers learn more about how life evolved on Earth and how it might exist on other worlds.
The Woods Hole Oceanographic Institution has explored depths of 36,000 feet below sea level in the Mariana Trench using a robotic submarine called Orpheus. The robot is helping create 3D imaging of the ocean floor and capture video footage of deep-sea life. Its navigation system may one day be used in robots that explore the dark oceans of the moons of Jupiter and Saturn.
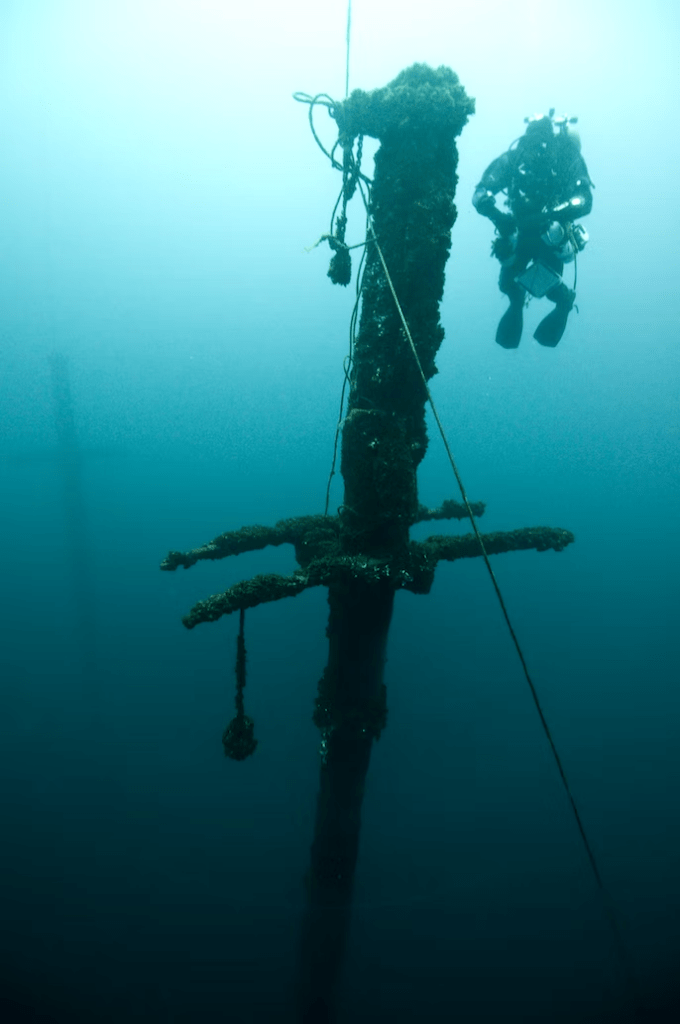
Taking a completely different approach is the OceanOne robotic SCUBA diver developed by researchers at Stanford University. The OceanOne is designed to be as human-like as possible, acting as a robotic avatar for human divers. On its maiden voyage in 2016, OceanOne was used to retrieve the first treasures ever recovered from the flagship of King Louis XIV, wrecked in 1664. Humans have never touched the wreck before.
NASA is also developing a deep-sea robot — the Aquanaut — which features a humanoid design. The Aquanaut has front-mounted cameras and sensors, as well as robotic arms engineers can connect various tools to. Unlike other deep-sea robots, the Aquanaut is geared more toward underwater work than exploration. However, NASA still plans to use robots to explore the oceans of Europa and Enceladus, frozen moons of Jupiter and Saturn, respectively.
What the Robot Divers are Discovering
These robotic SCUBA divers are making incredible discoveries at the bottom of the ocean. For starters, robots are helping scientists map the ocean floor, which is a monumental undertaking. Robots that dive down to the seabed need to withstand immense pressures that would kill a human diver. Plus, all of the robot’s instrumentation, sensors, cameras and navigation electronics must be able to survive, as well.
In addition to mapping the ocean floor, robotic SCUBA divers are helping humans find new species of aquatic life. The seabed seems like an unlikely place for life — it is entirely devoid of sunlight and freezing. However, robotic deep-sea exploration has changed how scientists think about the necessary ingredients for life.
Dozens of new species have been discovered living in the darkness of the deep oceans. They range from colossal squids to strange life forms that look like something straight out of science fiction. Many deep-sea animals do not have eyes since there is no light on the ocean floor. Others have evolved to be far larger than their higher-depth cousins, such as enormous jellyfish and crabs.
The Future of Robotic SCUBA Divers
Robots are taking exploration to new horizons that would otherwise be unattainable for humans. Earth’s oceans remain some of the least explored regions in the solar system. With the help of robotic SCUBA divers, scientists are discovering new species, unearthing ancient shipwrecks and revolutionizing knowledge of the sea.
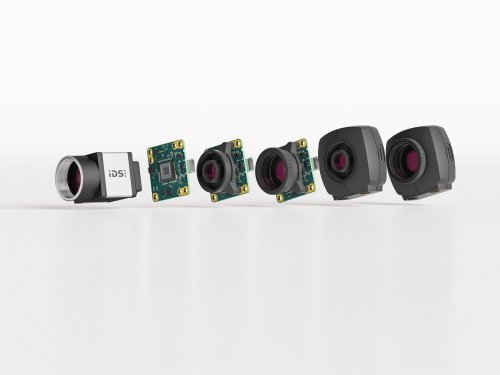
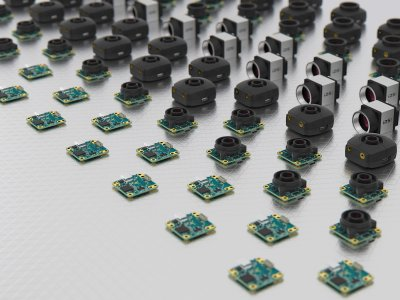
Anyone who needs quickly available industrial cameras for image processing projects is not faced with an easy task due to the worldwide chip shortage. IDS Imaging Development Systems GmbH has therefore been pushing the development of alternative USB3 hardware generations with available, advanced semiconductor technology in recent months and has consistently acquired components for this purpose. Series production of new industrial cameras with USB3 interface and Vision Standard compatibility has recently started. In the CP and LE camera series of the uEye+ product line, customers can choose the right model for their applications from a total of six housing variants and numerous CMOS sensors.
The models of the uEye CP family are particularly suitable for space-critical applications thanks to their distinctive, compact magnesium housing with dimensions of only 29 x 29 x 29 millimetres and a weight of around 50 grams. Customers can choose from global and rolling shutter sensors from 0.5 to 20 MP in this product line. Those who prefer a board-level camera instead should take a look at the versatile uEye LE series. These cameras are available with coated plastic housings and C-/CS-mount lens flanges as well as board versions with or without C-/CS-mount or S-mount lens connections. They are therefore particularly suitable for projects in small device construction and integration in embedded vision systems. IDS initially offers the global shutter Sony sensors IMX273 (1.6 MP) and IMX265 (3.2 MP) as well as the rolling shutter sensors IMX290 (2.1 MP) and IMX178 (6.4 MP). Other sensors will follow.
The USB3 cameras are perfectly suited for use with IDS peak thanks to the vision standard transport protocol USB3 Vision®. The Software Development Kit includes programming interfaces in C, C++, C# with .NET and Python as well as tools that simplify the programming and operation of IDS cameras while optimising factors such as compatibility, reproducible behaviour and stable data transmission. Special convenience features reduce application code and provide an intuitive programming experience, enabling quick and easy commissioning of the cameras.
Kivnon will be presenting its most advanced and safest AGV/AMR Forklift at the event
21 September 2022, Barcelona: Kivnon, an international group specializing in automation and mobile robotics, is attending Logistics & Automation in Spain and will be showcasing it’s safe and versatile K55 AGV/AMR Forklift Pallet Stacker. Putting the emphasis on forklift safety, Kivnon K55 is equipped with advanced safety features to guarantee safe operations as it collaborates, moves, and reacts in a facility.
The Kivnon K55 is designed to move and stack palletized loads at low heights and performs cyclic or conditioned routes while interacting with other AGVs/AMRs, machines, systems, and people, making it a highly effective and safe solution. The model incorporates safety scanners that allow the vehicle to ensure 360-degree safety and operate seamlessly in shared spaces. The fork sensors help assess the possibility of correct loading or unloading of the pallet, keeping the transported goods safe.
Thierry Delmas, Managing Director at Kivnon, says, “AGVs/AMRs are revolutionizing internal logistics. The rising forklift safety challenge is of deep concern, and with the K55 we have taken a step forward to address the global issue. The Kivnon range is designed to ensure safe and reliable operations and to optimize operational efficiency.“
During the event, which runs from 26 – 27 October at IFEMA, Madrid, Kivnon will demonstrate the capabilities of the K55 Pallet Stacker. The vehicle can autonomously transport palletized loads of up 1,000 kg and lift them to heights of up to 1 meter. The vehicle is capable of performing cyclical or conditional circuits and interacting with other AGVs/AMRs, machines, and systems. Highly adaptable, the K55 is perfect for any open-bottom or euro-pallet storage application, receipt and dispatch of goods, and internal material transport. Its use will optimize safety, storage space, and process efficiency.
A robust industrial product, the K55 provides the reliability required to ensure continuity of production process and flexibility to adapt to specific application needs, with an online battery charging system that can function 24/7 with opportunity charges.
Delmas continues, “The Logistics and Automation show is an important networking event where customers can learn about the latest technologies and innovations. We pride ourselves on innovation and are excited to have this opportunity to showcase the capabilities of our products. In addition to the K55, our robust portfolio also includes twister units, car and heavy load tractors, low-height vehicles, and cart pullers, meeting multiple application needs”
The efficiency and precision of Kivnon AGVs/AMRs will be on display and Kivnon robotics experts will be available throughout the show to answer questions and arrange consultations at booth #3F43.
Kivnon offers a wide range of autonomous vehicles (AGVs/AMRs) and accessories for transporting goods, using magnetic navigation or mapping technologies that adapt to any environment and industry. The company offers an integrated solution with a wide range of mobile robotics solutions automating different applications within the automotive, food and beverage, logistics and warehousing, manufacturing, and aeronautics industries.
Kivnon products are characterized by their robustness, safety, precision, and high quality. A user-friendly design philosophy creates a pleasant, simple to install, and intuitive work experience.
Learn more about Kivnon mobile robots (AGVs/AMRs) here.
Apptronik, an Austin-based company specializing in the development of versatile, mobile robotic systems, is announcing a partnership with NASA to accelerate commercialization of its new humanoid robot. The robot, called Apollo, will be one of the first humanoids available to the commercial markets.
At Apptronik’s headquarters in Austin, Texas, the first prototype of Apollo is now complete, with the expectation of broader commercial availability in 2023. Unlike special-purpose robots that are only capable of a single, repetitive task, Apollo is designed as a general-purpose robot capable of doing a wide range of tasks in dynamic environments. Apollo will benefit workers in industries ranging from logistics, retail, hospitality, aerospace and beyond.
NASA is known across the globe for its contributions to the advancement of robotics technology. NASA first partnered with Apptronik in 2013 during the DARPA Robotics Challenge (DRC), where founders were selected to work on NASA’s Valkyrie Robot. The government agency has now selected Apptronik as a commercial partner to launch a new generation of general-purpose robots, starting with Apollo.
“Continued investment from NASA validates the work we are doing at Apptronik and the inflection point we have reached in robotics. The robots we’ve all dreamed about are now here and ready to get out into the world,” said Jeff Cardenas, CEO and co-founder of Apptronik. “These robots will first become tools for us here on Earth, and will ultimately help us move beyond and explore the stars.”
In addition to its work with NASA, Apptronik’s team has partnered with leading automotive OEMs, major transportation and logistics companies, and government agencies. Boasting notable names including Dr. Nicholas Paine, Co-founder and Chief Technology Officer of Apptronik and Dr. Luis Sentis, Co-Founder and Scientific Advisor, its team is respected as among the best in the world. A growing hub for robotics, the Austin-based company continues to recruit top talent looking to bring their innovations to market now.
Apptronik is recognized for its emphasis on human-centered design, building beautifully designed and user-friendly robotic systems. As part of this commitment, it selected premier design firm argodesign as its partner in designing Apollo with the goal of creating robots capable of working alongside humans in our most critical industries. The team’s focus now is to scale Apollo so that it can be customer-ready in 2023.
About Apptronik: Apptronik is a robotics company that has built a platform to deliver a variety of general-purpose robots. The company was founded in 2016 out of the Human Centered Robotics Lab at the University of Texas at Austin, with a mission to leverage innovative technology for the betterment of society. Its goal is to introduce the next generation of robots that will change the way people live and work, while tackling some of our world’s largest challenges. To learn more about careers at Apptronik, visit https://apptronik.com/careers/.
Konstanz, 13. September 2022 – fruitcore robotics zeigt erstmalig auf der Motek 2022 seine neuen Komplettlösungen horstCUBE plug & play sowie die neue Version von horstFX. Die Bediensoftware der Robotik-Expert:innen aus Konstanz wurde vollständig überarbeitet. Die neue Version von horstFX macht die Bedienung einfacher sowie komplexer Anwendungen noch leichter und setzt damit einen neuen Benchmark. fruitcore robotics stellt in Halle 7 am Stand 7304 aus.
Die neue Version der Bediensoftware horstFX bringt viele neue Features mit sich. „Globale Funktionen“ machen die HORST-Roboter in verschiedenen Anwendungen noch schneller einsetzbar, weil Funktionen mit einem Klick in andere Programme übernommen werden können. Neu ist auch die Möglichkeit zur „Individuellen Anpassung der Bedienoberfläche“ durch Kund:innen selbst. „Smart Makro-Buttons“ sind frei mit häufig verwendeten Funktionen belegbar und erleichtern so sowohl die Programmierung als auch den Betrieb des Roboters. Häufig verwendete Funktionen können beispielsweise das Anfahren der Grundstellung oder Start und Stopp eines Förderbandes sein. Ein weiteres neues Hauptfeature ist die „Nutzerspezifische Ansicht“. In ihr wird die Bedienoberfläche auf drei Bedienelemente sowie eine Anzeige des Prozessstatus reduziert. Zudem besteht die Möglichkeit, in den Screen „Smart Makro Buttons“ zur Ausführung gewünschter Funktionen zu integrieren. So ist im Betrieb der Automatisierungsanwendung maximale Einfachheit für den Bediener gegeben.
Die neue Version von horstFX stellt darüber hinaus die Grundlage für die Soft-SPS-Funktion zur Steuerung paralleler und komplexer Prozesse dar, deren Einführung fruitcore robotics in der Zukunft plant. „Die Soft-SPS-Funktion wird eine zusätzliche SPS-Steuerung für einen Großteil der Anwendungen überflüssig machen und dadurch bei unseren Kund:innen zu einer weiteren Vereinfachung und Kostenreduktion führen, so Patrick Heimburger, Geschäftsführer von fruitcore robotics. „Es sind dann keine Kenntnisse in der SPS- oder Roboterprogrammierung mehr notwendig, um mit horstFX und HORST-Robotern zu automatisieren.“
Die neue Bediensoftware steht sowohl als Online-Version als auch als Desktop-Version ab sofort zur Verfügung. Mit Trial-Varianten können sich Nutzende von der Einfachheit der Bedienung überzeugen und schon vor der Kaufentscheidung testen, ob HORST ihren Anforderungen entspricht. Auch am High-End-Spektrum der Software werden die Grenzen mit weiteren Features künftig verschoben: Die grafische Programmierung komplexer Pfade und nutzerspezifische Koordinatensysteme helfen bei der Umsetzung von pfadabhängigen Anwendungen, wie beispielsweise dem Schweißen oder Kleben und bei Anwendungen, bei denen eine relative Orientierung des Roboters zu bestimmten Objekten, beispielsweise einer zu beladenden Maschine, bei der Programmierung hilft.
horstCUBE plug & play Laser erweitert Portfolio der Komplettlösungen
Im Mittelpunkt des Messeauftritts steht außerdem die Neuheit horstCUBE plug & play. Das Publikum kann auf der Motek 2022 erstmals gleich zwei standardisierte Anwendungsfälle live erleben. Denn neben der bereits auf der automatica 2022 vorgestellten Komplettlösung horstCUBE plug & play Vereinzelung zeigt fruitcore robotics die neue Komplettlösung horstCUBE plug & play Laser, eine All-in-One Beschriftungslösung. Die Laserbeschriftungszelle ist mit einem Hochleistungslaser ausgestattet, der eine flexible 360° Beschriftung von Bauteilen ermöglicht. Beide Komplettlösungen basieren auf der Roboterplattform horstCUBE und sind bereits mit allen Komponenten ausgestattet, die für diese Anwendung notwendig sind. horstCUBE wird von fruitcore robotics auch als Einzelprodukt angeboten, denn die flexible Roboterplattform bietet die optimale Basis, um verschiedenste Anwendungen mit den Robotern von fruitcore robotics einfach, schnell und sicher zu realisieren.
Digital Robots: Zentraler Baustein der Automatisierung und Digitalisierung
Als Automatisierungs-Lösung umfassen die Digital Robots von fruitcore robotics nicht nur eine leistungsstarke und preisgünstige Hardware. Sie folgen einem in sich abgestimmten Bedienkonzept, durch welches nicht nur die Bedienung des Roboters besonders einfach ist, sondern auch die Umsetzung der gesamten Anwendung. Alle am Prozess beteiligten Komponenten, wie Greifer, CNC-Anlagen und Sicherheitssysteme werden über die grafische Bedienoberfläche horstFX bedient und zentral mit der IIoT-Plattform horstCOSMOS vernetzt. Auch die beiden horstCUBE plug & play Lösungen für die Teilevereinzelung und die Laserbeschriftung sind voll vernetzt und ohne Vorkenntnisse einsetzbar. Neben der Anbindung an die IIoT-Plattform ist bei allen Robotik-Lösungen von fruitcore robotics ein IIoT-Surfstick mit SIM-Karte standardmäßig im Lieferumfang enthalten. Dieser bietet Unternehmen die Möglichkeit, mit dem Robotersystem online zu gehen, ohne es in ihr Firmennetzwerk einbinden zu müssen. Kund:innen können nach Bedarf eine Internetverbindung aufbauen und via horstCOSMOS auf Dashboards ihre Roboterflotte samt Prozessdaten der Roboteranwendung einsehen. Auf Grundlage dessen lassen sich Prozesse optimieren und eine vorausschauende Wartung realisieren. Die Expert:innen von fruitcore robotics geben auf der Motek Einblicke in die Funktionalitäten und Vorteile der IIoT-Plattform und stehen für Fragen rund um HORST und seine Möglichkeiten bereit.
If you are an experienced Maker, or even just a passing Tinkerer, the RoboHeartTMHercules development board may be just what you are looking for.
RoboHeart is an exceptional development board that proudly boasts: “One board to rule them all!” This exceptional circuit board is just what is sounds like: the heart of your robotics Maker project.
At Augmented Robotics, we have gone the extra mile by combining the magic of Augmented Reality with embedded mobile systems, so you can play and manipulate brave new worlds using only your smartphone. This allows you to control any RC device or creative Maker project with connectivity in WiFi, BLE and even 5G when paired with out RoboHeart Vela board. On Tuesday, August 23, 2022, RoboHeart was launched on Kickstarter, and it reached its funding goal in less than three hours! In only two short days, RoboHeart was selected as the coveted “Project We Love” by Kickstarter – an award given to projects that really stand out with creative innovation.
By replacing the circuit board inside your RC car with RoboHeart, you can drive the car with only your smartphone – so we have decided to add an original AR game on top of that. Drive around and collect candies to get the most points… but careful not to run out of fuel! As we reach more stretch goals, the game will get increasingly complex. We have already reached our first stretch goal – Gamepad compatibility – but there are many more to come.
The Maker community is the most creative community out there, so RC cars are definitely not the only thing your RoboHeart board can be used for. Put the board into any electronics project and watch it come to life!
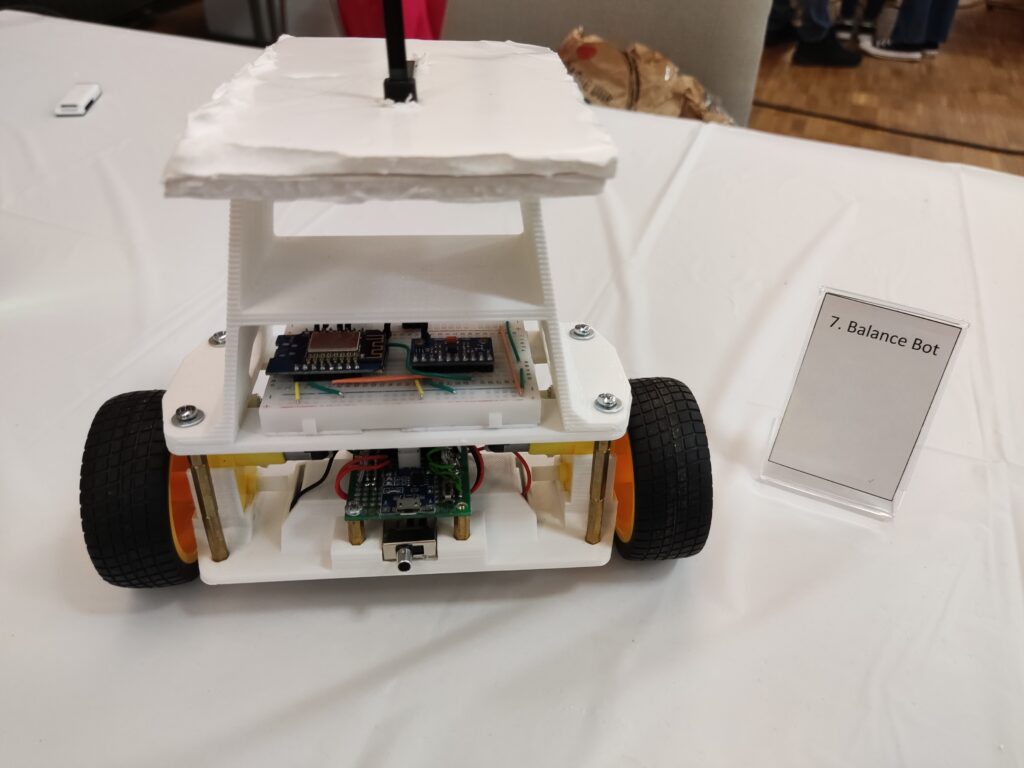
Get RoboHeart and dive right into building projects with an open-source RoboHeart Arduino library on GitHub! Our repository has several cool examples at varied complexities, from reading the IMU sensor data to controlling things with your smartphone. For example, we have built our own Balancing Bot using only one board:
The RoboHeart Hercules has all the features one needs to start building:
ESP32-WROOM32 with dual-core and WiFi+Bluetooth capabilities
Arduino compatibility for easy programming
An integrated Inertial Measurement Unit (IMU) for motion data
Three DC motor outputs
USB-C connector with auto-download feature: flashing is a piece of cake!
LiPo battery input with auto-charging feature: where do you need Power most, at USB or LiPo? RoboHeart will automatically distribute power where it is most needed
Convenient peripherals for Makers: GROVE, JST and JTAG
… and with the addition of the RoboHeart Vela extension board, Makers can unlock the power of 5G, and no longer be dependent on the BLE range of 50m.
So the only question that remains is: What will YOU do with RoboHeart?