XPRIZE has joined forces with Walt Disney Studios Motion Pictures and Disney Corporate Citizenship for today’s launch of a nationwide video contest designed to find the real-life counterparts to the animated heroes that will soon burst onto the big screen in „BIG HERO 6,“ an action-packed comedy-adventure from Disney opening November 7, 2014.
The DISNEY BIG HERO 6 – XPRIZE CHALLENGE invites young people between the ages of 8 and 17 to harness their creativity and come up with innovative ideas to tackle the world’s biggest challenges using science, technology, engineering, art and/or mathematics.
The six winners, the real-life „Big Hero 6,“ will travel to Los Angeles to walk the red carpet at the film’s Hollywood premiere in early November, go behind the scenes and meet the creative minds at both Walt Disney Animation Studios and Walt Disney Imagineering, join a special „Visioneering™“ experience at XPRIZE headquarters, plus other prizes.
Video Submissions will be judged on innovation, creativity and presentation. Twenty (20) finalists will be selected based on the highest scores resulting from preliminary scoring by XPRIZE judges. In mid October, a panel of luminary S.T.E.A.M. expert judges will evaluate the twenty finalists‘ submissions and six (6) winners will be selected through a combination of the expert judges‘ scores and public voting results.
Said Walt Disney Animation Studios President Ed Catmull, „We are thrilled to work with XPRIZE to find real-life young heroes whose desire is to tackle the world’s great challenges. It’s an honor for all of us at Walt Disney Animation Studios to welcome them at our Studio and at the premiere of „Big Hero 6.“
„The young people who win this contest will be real-world heroes, ready and willing to tackle some of the greatest challenges facing our world today,“ said Trish Halamandaris, senior vice president marketing & communications at XPRIZE. „The XPRIZE Foundation is excited to be conducting this competition that challenges young people to be bold, creative and smart, and to dare to think big. We believe that solutions to the problems facing humanity can come from anyone, anywhere, and one of these kids just might come up with an idea that can truly change the world.“
In addition to the trip to Los Angeles, the six winners will receive reimbursement for one (1) Contestant registration for FIRST® LEGO® League for the competition season 2014-2015 in the US or Canada, and a Special littleBits® NASA Space Kit and cloudBit™ Starter Kit.
The contest is open for submissions from September 17, 2014, to October 12, 2014.
Participating kids will compete in two divisions: Junior Division (8-12 years of age), and Senior Division (13–17 years of age). All entrants must have prior consent from their parent or legal guardian in order to participate in the challenge. Registration details are available at xprizechallenge.org/bighero6.
The video submissions may involve a short story, sculpture, drawing, model, robot or whatever method best communicates the idea in the most creative way (please see Official Rules for further details, restrictions and limitations). They will be scored on how well they explain the problem, show their solution, and explain what they learned and the impact their idea would have on themselves and the world. The more creative and engaging their presentation is, the better their chance of winning.
Supporting XPRIZE Partners include FIRST (For Inspiration and Recognition of Science and Technology), littleBits Electronics and the United States Patent and Trademark Office.
No purchase necessary. Void where prohibited. Challenge registration and video submissions start September 17, 2014, and end October 12, 2014. Public Voting will start October 15, 2014 and end October 19, 2014. Open to legal residents of US and Canada (excluding Quebec) who are ages 8 through 17 before September 17, 2014. Parental consent is required. Travel must occur on November 2-6, 2014 (or such other dates designated by Sponsor). For details, restrictions, and limitations and to enter, please visit Official Rules at: xprizechallenge.org/bighero6. Sole Sponsor: XPRIZE.




 The complete box with nice sticker on it!
The complete box with nice sticker on it!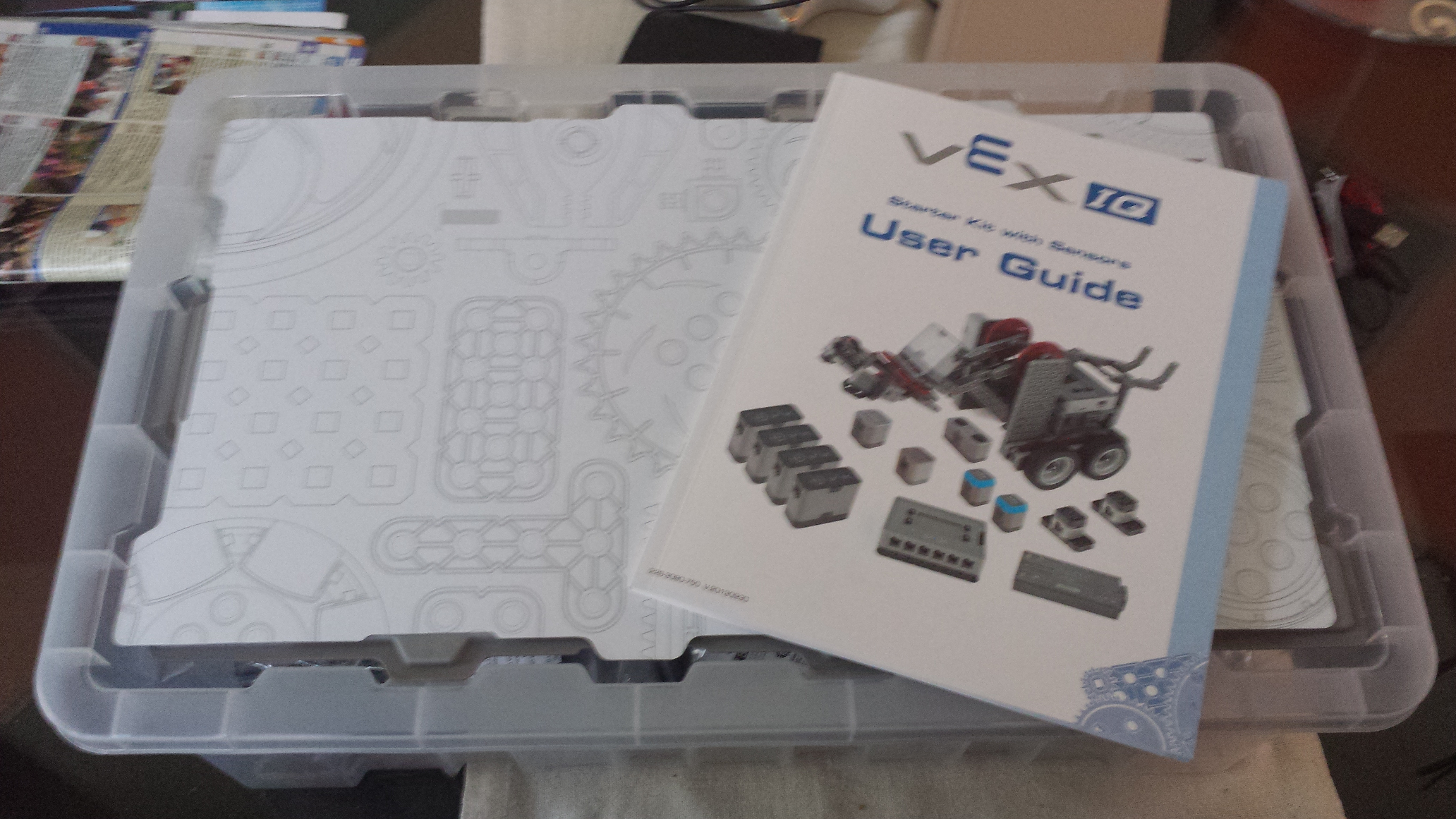 The opened box, showing manual and separator.
The opened box, showing manual and separator.
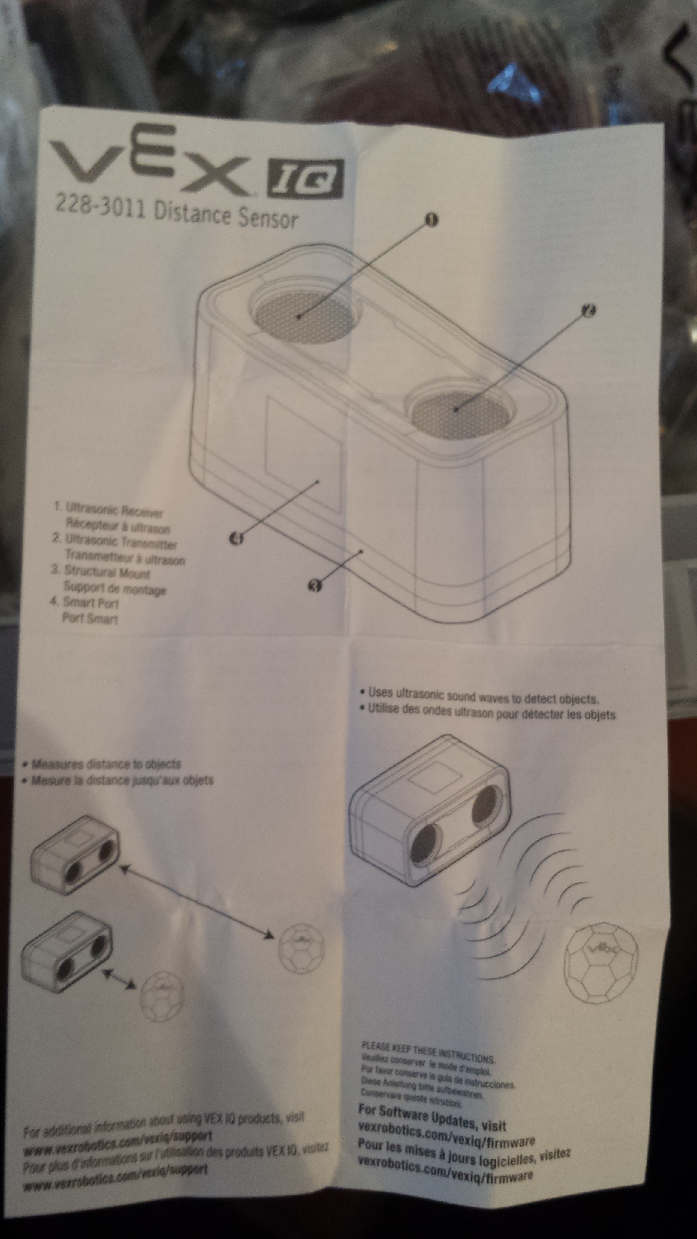
 An unboxed distance sensor (ultrasonic).
An unboxed distance sensor (ultrasonic).