Bricktronics Shield Kit :: Wayne and Layne Store.
also see: http://www.wayneandlayne.com/bricktronics/downloads/

 Die LEGO Gruppe gibt ihre neueste Innovation im Bereich LEGO MINDSTORMS in dieser Woche auf der internationalen Consumer Electronics Show (CES) bekannt. LEGO MINDSTORMS EV3, der Nachfolger des LEGO Mindstorms NXT setzt die beliebte LEGO MINDSTORMS Produktlinie fort, und ist besser als je zuvor.
Die LEGO Gruppe gibt ihre neueste Innovation im Bereich LEGO MINDSTORMS in dieser Woche auf der internationalen Consumer Electronics Show (CES) bekannt. LEGO MINDSTORMS EV3, der Nachfolger des LEGO Mindstorms NXT setzt die beliebte LEGO MINDSTORMS Produktlinie fort, und ist besser als je zuvor.
Mit LEGO MINDSTORMS EV3 können Sie Ihre LEGO Kreationen in Roboter verwandeln, die jeden Befehl befolgen. Das neue LEGO MINDSTORMS EV3 Set beinhaltet alles, was Sie brauchen – Motoren, Sensoren, programmierbaren intelligenten Baustein, 550 + LEGO Technic Elemente, Fernbedienung – zum Bauen und Programmieren der Roboter deiner Wünsche! Lade die 3D Bauanleitungen herunter und die neue App zum Steuern deines Roboters per Smartphone, dann programmiere deinen Roboter zu gehen, sprechen oder was auch immer du möchtest mit der neuen intuitiven Programmiersoftware, dem intelligenten Baustein oder deinem Smartphone.

Die Spezifikationen des neuen LEGO Mindstorms EV3 Systems:
EV3 Intelligenter Baustein:
Hardware:
Programmier-Software:

CONSUMER ELECTRONICS SHOW, LAS VEGAS (January 7, 2013) – Today The LEGO Group announced LEGO® MINDSTORMS EV3, a new platform for consumer robotics designed to introduce a younger generation to the excitement of building and programming robots while adding new flexibility for its devoted following of robotics enthusiasts. Unveiled for the first time at the Consumer Electronics Show in Las Vegas, Nevada, LEGO MINDSTORMS EV3 is the result of three years of product development by an international team of LEGO designers, MINDSTORMS user-enthusiasts and leading technology experts. LEGO MINDSTORMS EV3, available in the second half of 2013, will be previewed to members of the global media at Digital Experience! on January 7 and will be demonstrated to CES attendees during the Kids@Play Summit, January 8-11, 2013, in the Venetian Hotel.
With LEGO MINDSTORMS EV3 you can turn your LEGO creations into live robots that follow your every command. The new LEGO MINDSTORMS EV3 set includes everything you need – motors, sensors, programmable brick, 550+ LEGO Technic elements, remote control – to create and command robots of even your wildest imagination, including 5 cool robot characters. Download the 3D building instructions and the app to command your robot via your smart device. Then program your robots to walk, talk, move and do whatever you want them to do to via the intuitive software program, the programmable brick or your smart device.
And not only do we have this good news, we also have the specifications:
EV3 Intelligent Brick
Hardware
Programming Software
Read more at BotBench
Read more at RobotSquare
Read more at Lego.com
Robot Virtual World Level Builder v. 1.0 Now Available!
The Level Builder will appear with two options: CREATE and PLAY.

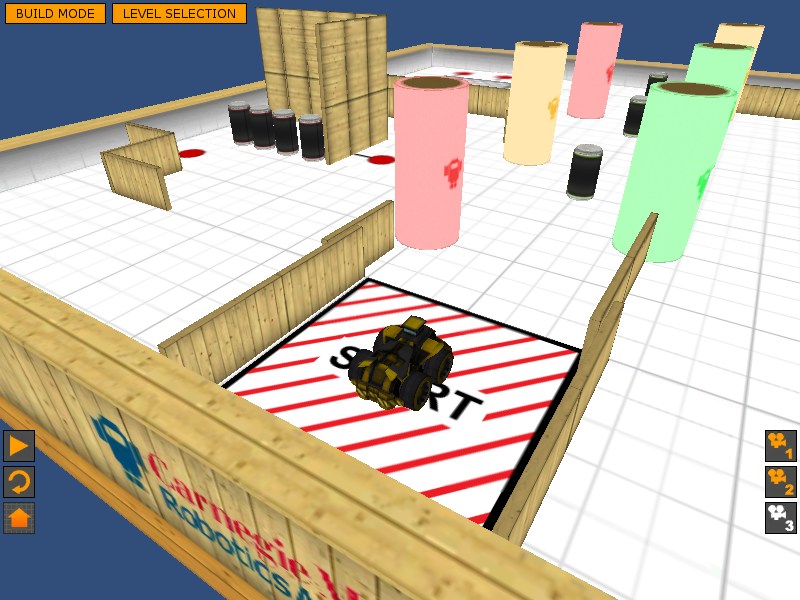
via Robot Virtual World Level Builder v. 1.0 Now Available! at ROBOTC.net Blog.
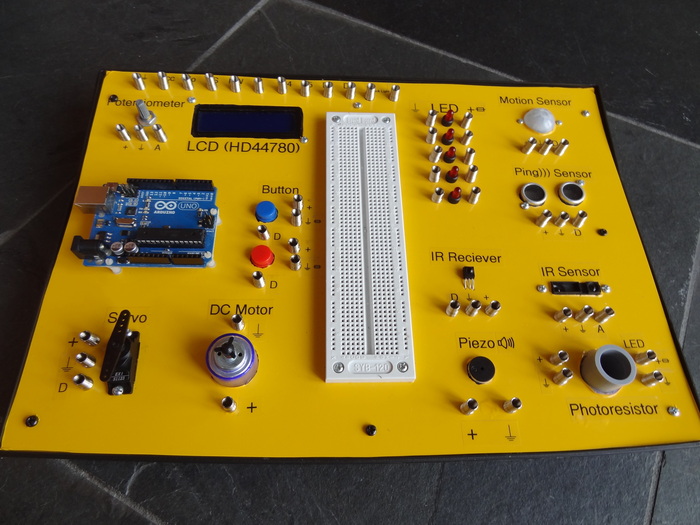
An all enclosed device to learn the basics of Robotics, Arduino, Sensors, and DC Motor control.
A system to design and build things in an easy way. Specially Robots. And it’s Open Source.

Multiplo: Create Your Own Robot by Multiplo LLC — Kickstarter.
Reality Robotics Limited proudly presents the Be the Robot™ Project!

What is the Be the Robot™ project you may ask?
It is an expertly-engineered-multi-motor-wireless-animated-mobile-robotic-toy-platform that features an advanced internal operating system for communicating through an open source APP with an Android / iOSsmart device through Bluetooth™.
Be The Robot (BERO)-Bluetooth Controlled Open Source Robot by Reality Robotics Limited — Kickstarter.