Konstanz, November 2025 – fruitcore robotics hebt mit dem neuen Release seines Betriebssystems horstOS die industrielle Automatisierung auf ein neues Level. Mit dem Update erhält die Software zahlreiche SPS-Funktionen. So können nicht nur der Roboter, sondern gesamte Prozesse mit und ohne KI-Unterstützung einfach gesteuert werden. Das Ergebnis: Mehr Leistung, weniger Aufwand – echte Autonomie in der Automatisierung.
Mehr Output durch Parallelität
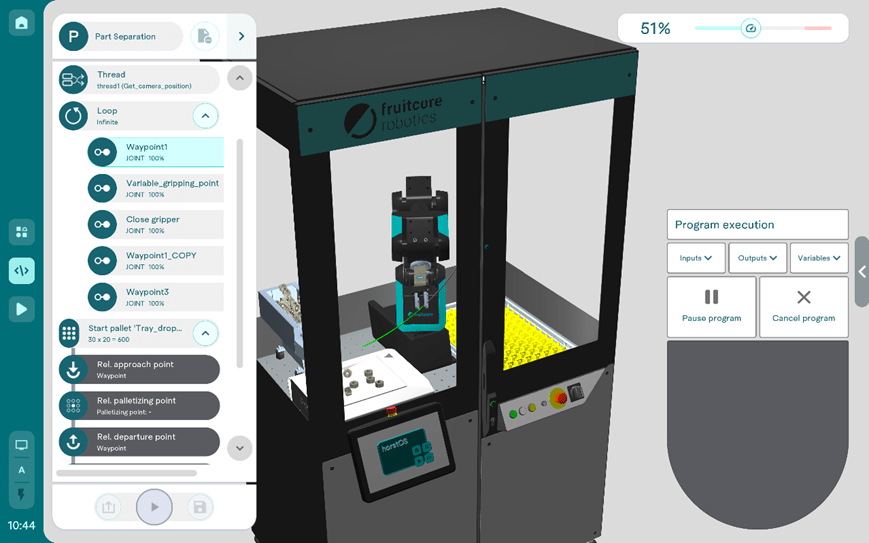
Mit der neuen Funktion „Parallele Prozesse“ können Anwender gleichzeitig ablaufende Vorgänge über ein einzigartig intuitives grafisches Interface einrichten – ganz ohne SPS-Kenntnisse. Dadurch lassen sich beispielsweise bei Aufgaben wie der Teilevereinzelung Taktzeiten deutlich reduzieren, da Roboterbewegung und Bauteillokalisierung zeitgleich erfolgen können.
Das Interface zur Einrichtung Paralleler Prozesse fügt sich nahtlos in die intuitiv bedienbare Benutzeroberfläche von horstOS ein und macht so auch die Umsetzung komplexerer Abläufe so einfach wie nie zuvor. Für Anwender bedeutet das Unabhängigkeit, Flexibilität und Zeitersparnis, da Prozesse ohne externes Expertenwissen schnell erstellt und bei Bedarf jederzeit angepasst werden können.
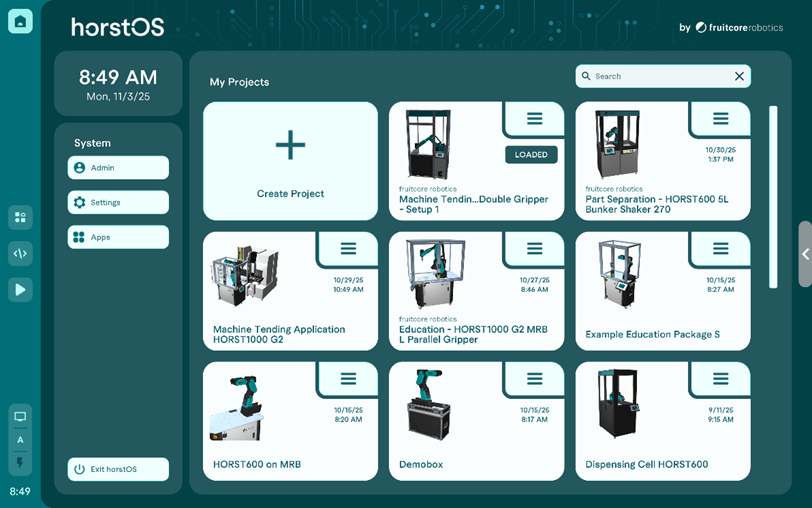
Sofort startklar mit Projekt- und Komponentenvorlagen
Das neue Projektmanagement in horstOS ermöglicht eine noch einfachere Organisation unterschiedlicher Setups und Anwendungen. Dank vorkonfigurierter Projektvorlagen können Anwender neue Projekte in kürzester Zeit aufsetzen und strukturiert verwalten.
Auch der Aufbau individueller Projektsetups gelingt mühelos über die umfangreiche Komponentenbibliothek mit über 200 „pre-trained“ Zubehörteilen. Die Komponenten – von Sicherheitstechnik über Greifer bis hin zu Kameras – sind vollständig mit 3D-Modell, Standardfunktionen, Schnittstelleninformationen und Dokumentation hinterlegt. So lassen sich unterschiedlichste Anwendungen schnell und mit hohem Qualitätsstandard umsetzen.
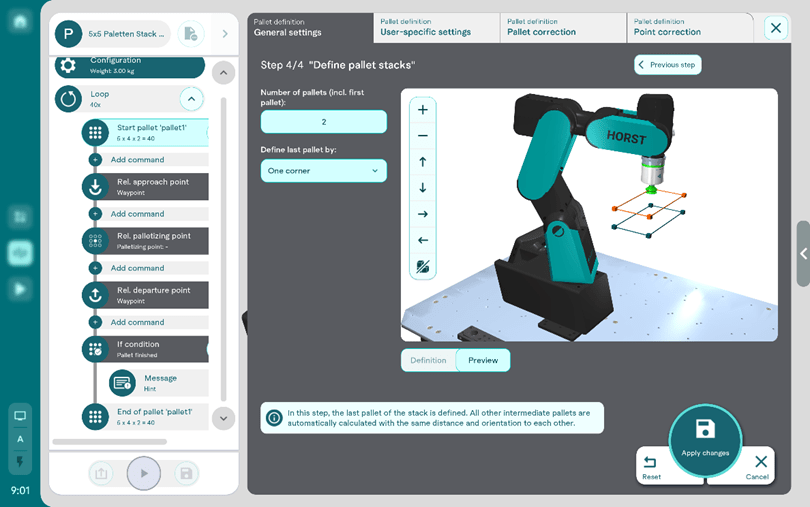
Schneller alles paletti
Eine schnellere Umsetzung von End-of-Line-Packaging und anderen Palettieraufgaben wird durch die weiterentwickelte Palettier-Wizard-Funktion ermöglicht. Mehrlagige Paletten können nun vollständig grafisch und ohne textuelle Programmierung erstellt werden, was die Komplexität in der Einrichtung deutlich reduziert.
Produktiver dank Auto-Start
Eine weitere SPS-Funktionalität bietet fortan die Start-up Routine, welche Anwendern einen vollautomatischen Systemstart ermöglicht: Nach dem Einschalten des Roboters werden Initialisierung, Programmaufruf und Programmstart automatisch ausgeführt. Somit kann sich der Bediener nach dem Einschalten des Roboters unmittelbar anderen Aufgaben widmen, während der Roboter selbstständig den Betrieb aufnimmt.
Auf dem Weg zu einem vernetzten Produktionsalltag ergänzt außerdem eine weitere wichtige neue IoT-Funktionalität horstOS: Sie informiert den Anwender bei Stillständen automatisch per E-Mail und ermöglicht so ein schnelles Eingreifen, um die Anlagenverfügbarkeit zu erhöhen.
Vorreiterrolle in KI-gestützter Automatisierung
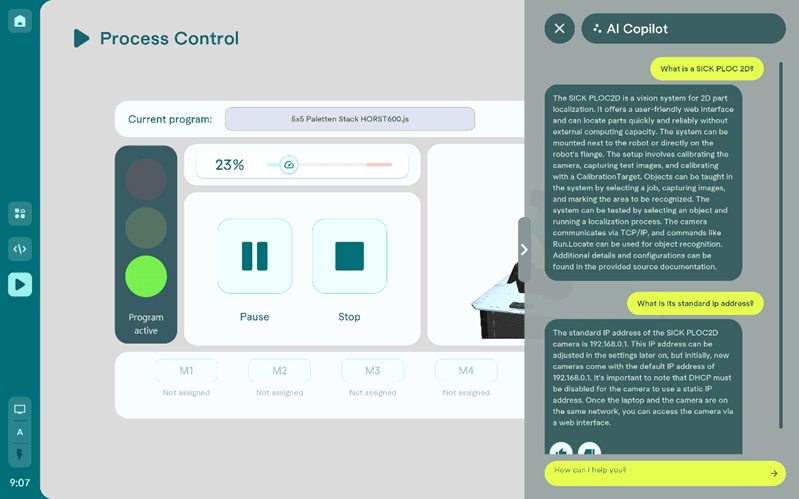
Seit der ersten Integration von KI-Funktionen in den Produktivbetrieb vor zwei Jahren entwickelt fruitcore robotics seine KI-Kompetenz konsequent weiter. Mit dem neuen Release basiert der AI Copilot auf der neuesten ChatGPT-Technologie, liefert dadurch noch präzisere Antworten und ermöglicht zudem eine natürliche, dialogbasierte Interaktion.
Damit hält der AI Copilot mit der dynamischen Entwicklung der KI-Welt Schritt und unterstützt Anwender noch effizienter bei Einrichtung und Betrieb ihrer Roboter. Künftige Erweiterungen werden die Zusammenarbeit mit dem AI Copilot, beispielsweise über Spracheingabe, zunehmend weiter vereinfachen und die intuitive, KI-gestützte Programmierung gezielt vorantreiben.