
Einfach installiert und schnell amortisiert ermöglicht der mobile Roboter den kostengünstigen Einstieg in die Automatisierung von Logistikprozessen
Stuttgart/Köln, 8. Oktober 2024 – Dass die Automatisierung von Intralogistikprozessen weder teuer noch kompliziert sein muss, beweist igus mit dem neuen ReBeL Move, den der Kölner motion plastics Spezialist auf der Motek 2024 präsentiert. Der mobile Roboter bewegt sich autonom durch Fabrikhallen und transportiert Produkte von A nach B – und kann dafür auch mit dem ReBeL Cobot aus Hochleistungskunststoff kombiniert werden. Es lässt sich schon mit einfachsten IT-Kenntnissen innerhalb einer Stunde in Betrieb nehmen und ist inklusive ReBeL Cobot für 34.808 Euro erhältlich.
Fahrerlose Transportsysteme (FTS) vereinfachen den Alltag in Industriebetrieben: Mitarbeiter an Maschinen müssen beispielsweise nicht länger Werkzeuge und Materialien zu Fuß aus dem Lager holen, sondern lassen sich von autonomen Fahrzeugen unterstützen. Dass eine solche Automatisierung in Zeiten von Kostendruck und Personalmangel die Produktivität steigert und Kosten senkt, erkennen auch immer mehr kleine und mittelständische Betriebe mit niedrigem Automatisierungsgrad. „Dennoch gibt es oft Berührungsängste, weil die Erfahrung fehlt und stattdessen die Angst vor Fehlinvestitionen überwiegt“, sagt Alexander Mühlens, Prokurist und Leiter Geschäftsbereich Low-Cost-Automation bei igus. „Um diesen Betrieben einen barrierefreien und risikoarmen Einstieg in die Automatisierung von Intralogistikprozessen zu ermöglichen, haben wir ein kostengünstiges und intuitiv bedienbares FTS mit einem integrierten Cobot zum Greifen von Gegenständen entwickelt: den ReBeL Move.“
Investition amortisiert sich unter 12 Monaten
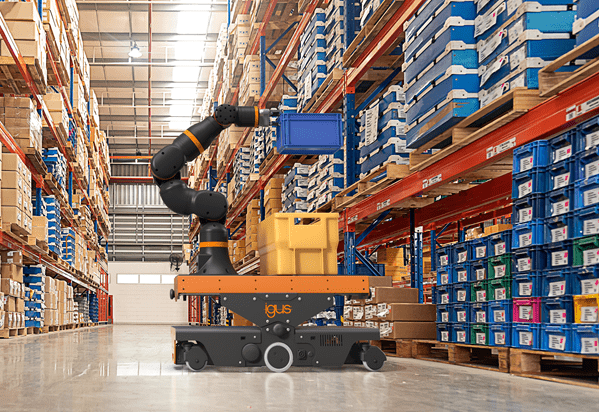
Das autonome Transportfahrzeug kann Kleinladungsträger (KLT) mit den Maßen 60×40 Zentimeter und 30×40 Zentimeter und einer Zuladung von bis zu 35 Kilogramm transportieren. Es fährt mit einer Geschwindigkeit von bis zu 1,5 m/s, hat eine Batterielaufzeit von über acht Stunden und eine Ladezeit von unter zwei Stunden. An Bord ist optional der ReBeL, ein Cobot, den igus fast vollständig aus robustem und kostengünstigem Hochleistungskunststoff fertigt. Der Gelenkarmroboter ist mit einem Einzelpreis von nur 4.970 Euro für die vollausgestattete Variante fünfmal günstiger als vergleichbare Modelle aus Metall. Er hat ein Eigengewicht von 8,2 Kilogramm, eine Traglast von 2 Kilogramm und eine Reichweite von 664 Millimetern. „Mit einem Preis von nur 34.808 Euro kostet der ReBeL Move nur einen Bruchteil herkömmlicher FTS, sodass sich die Investition innerhalb von 12 Monaten amortisiert“, so Alexander Mühlens.
ReBeL Move lässt sich innerhalb einer Stunde in Betrieb nehmen
Das neue FTS-System ist nicht nur kostengünstiger als vergleichbare Lösungen, sondern auch besonders leicht in Betrieb zu nehmen – ähnlich schnell wie ein Rasenmähroboter. In weniger digitalisierten Unternehmen funktioniert das FTS als eigenständiges System, das lediglich eine WLAN-Verbindung benötigt. Für die Konfiguration bewegt der Betreiber das Fahrzeug mit einem Handcontroller entlang der zukünftigen Arbeitsbereiche. Der ReBeL Move verfügt über eine 360-Grad-Kamera und erstellt mithilfe der sogenannten Slam-Technologie während der Rundfahrt automatisch eine Digitalkarte. Auf dem Tablet kann der Betreiber nach dieser ersten Kartierungsfahrt dann einzelne Stationen zum Arbeiten, Warten und Aufladen festlegen. Ebenso No-go-Areas wie Bereiche rund um Treppen und Fahrstühle oder Zonen, in denen der Roboter mit reduzierter Geschwindigkeit fahren soll, um Mitarbeiter nicht zu stören. In der physischen Realität erkennt der mobile Roboter die Zielorte dann mithilfe einer Kamera und Reflektoren an den einzelnen Stationen, ohne dass der Betreiber aufwendig Leitlinien oder Spuren auf dem Boden installieren müsste.
Kinderleicht festlegen lassen sich über das Tablet zudem die Jobs, die der ReBeL Move in der Intralogistik erledigen soll, etwa mit dem ReBeL Cobot an Station A Produkte aus einem Gebinde entnehmen und zu Station B transportieren. Teil der Lösung ist darüber hinaus eine Software, die ein intelligentes Flottenmanagement ermöglicht, sodass mehrere FTS effizient zusammenarbeiten können. „Die gesamte Inbetriebnahme ist so leicht, dass Anwender innerhalb von 15 Minuten einfache Jobs programmieren können“, sagt Mühlens. Auch die Einbindung in gewachsene IT-Landschaften, die beispielsweise ein synchronisiertes Zusammenspiel von Robotern und automatischen Rolltoren ermöglicht, ist dank Schnittstellen wie IoT, VDA 5050, REST, SAP und ERP kein Problem. Mühlens: „Da die Inbetriebnahme so schnell funktioniert, können wir bei interessierten Kunden jederzeit vor Ort kleine Automationslösungen simulieren und ihnen somit die Berührungsangst mit der Technologie nehmen. Zum Kaufmodell haben wir zusätzlich auch ein Mietmodell im Angebot.“







