Einfach installiert und schnell amortisiert ermöglicht der mobile Roboter den kostengünstigen Einstieg in die Automatisierung von Logistikprozessen
Stuttgart/Köln, 8. Oktober 2024 – Dass die Automatisierung von Intralogistikprozessen weder teuer noch kompliziert sein muss, beweist igus mit dem neuen ReBeL Move, den der Kölner motion plastics Spezialist auf der Motek 2024 präsentiert. Der mobile Roboter bewegt sich autonom durch Fabrikhallen und transportiert Produkte von A nach B – und kann dafür auch mit dem ReBeL Cobot aus Hochleistungskunststoff kombiniert werden. Es lässt sich schon mit einfachsten IT-Kenntnissen innerhalb einer Stunde in Betrieb nehmen und ist inklusive ReBeL Cobot für 34.808 Euro erhältlich.
Fahrerlose Transportsysteme (FTS) vereinfachen den Alltag in Industriebetrieben: Mitarbeiter an Maschinen müssen beispielsweise nicht länger Werkzeuge und Materialien zu Fuß aus dem Lager holen, sondern lassen sich von autonomen Fahrzeugen unterstützen. Dass eine solche Automatisierung in Zeiten von Kostendruck und Personalmangel die Produktivität steigert und Kosten senkt, erkennen auch immer mehr kleine und mittelständische Betriebe mit niedrigem Automatisierungsgrad. „Dennoch gibt es oft Berührungsängste, weil die Erfahrung fehlt und stattdessen die Angst vor Fehlinvestitionen überwiegt“, sagt Alexander Mühlens, Prokurist und Leiter Geschäftsbereich Low-Cost-Automation bei igus. „Um diesen Betrieben einen barrierefreien und risikoarmen Einstieg in die Automatisierung von Intralogistikprozessen zu ermöglichen, haben wir ein kostengünstiges und intuitiv bedienbares FTS mit einem integrierten Cobot zum Greifen von Gegenständen entwickelt: den ReBeL Move.“
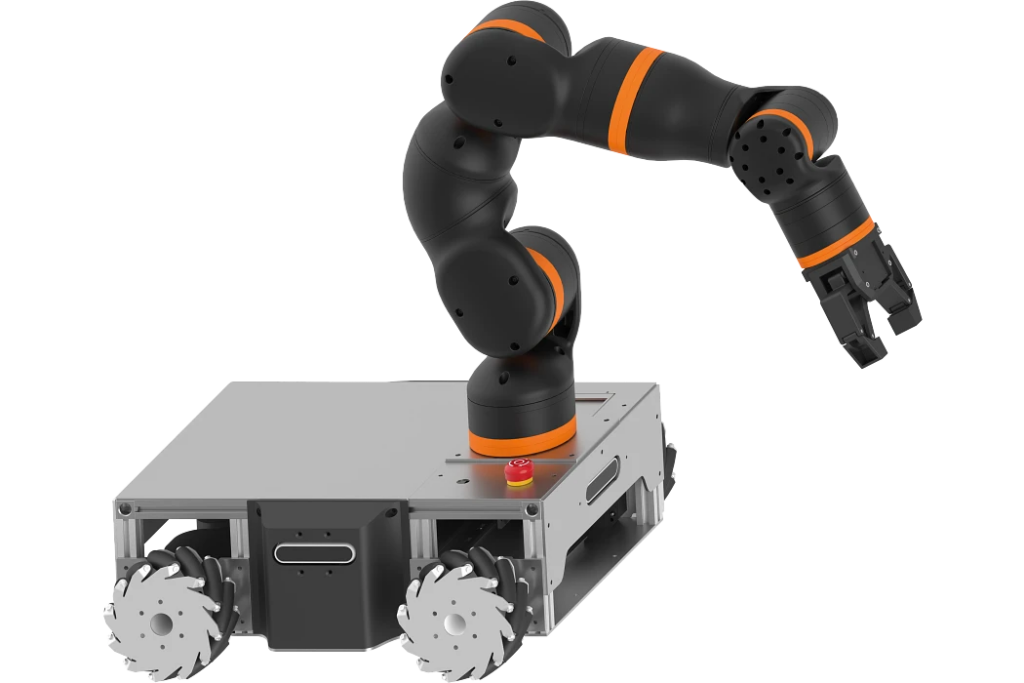
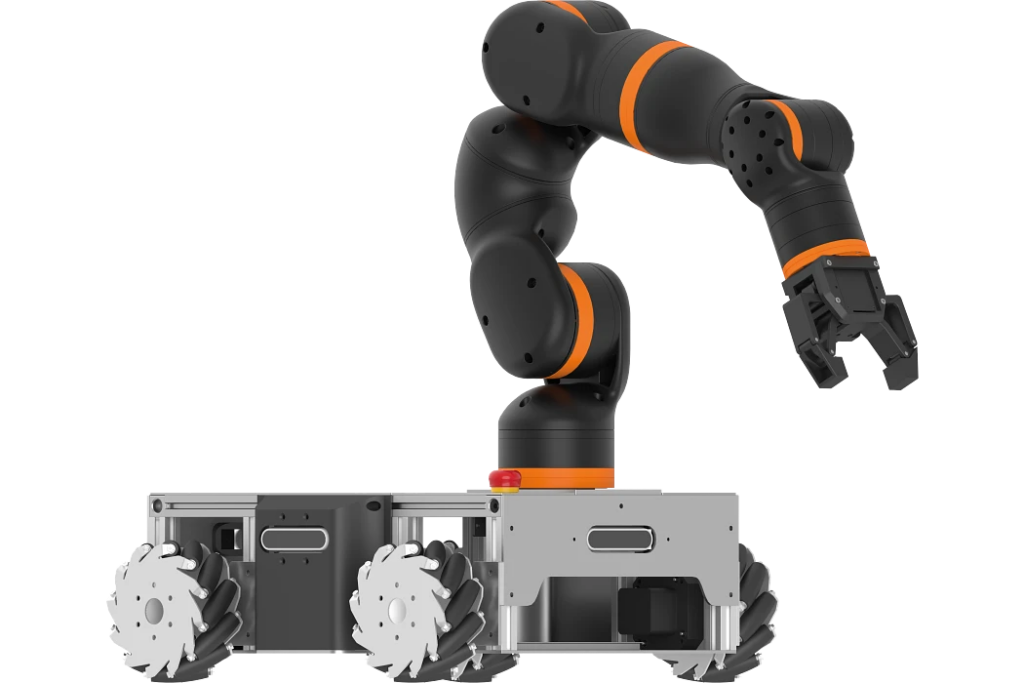
Investition amortisiert sich unter 12 Monaten Das autonome Transportfahrzeug kann Kleinladungsträger (KLT) mit den Maßen 60×40 Zentimeter und 30×40 Zentimeter und einer Zuladung von bis zu 35 Kilogramm transportieren. Es fährt mit einer Geschwindigkeit von bis zu 1,5 m/s, hat eine Batterielaufzeit von über acht Stunden und eine Ladezeit von unter zwei Stunden. An Bord ist optional der ReBeL, ein Cobot, den igus fast vollständig aus robustem und kostengünstigem Hochleistungskunststoff fertigt. Der Gelenkarmroboter ist mit einem Einzelpreis von nur 4.970 Euro für die vollausgestattete Variante fünfmal günstiger als vergleichbare Modelle aus Metall. Er hat ein Eigengewicht von 8,2 Kilogramm, eine Traglast von 2 Kilogramm und eine Reichweite von 664 Millimetern. „Mit einem Preis von nur 34.808 Euro kostet der ReBeL Move nur einen Bruchteil herkömmlicher FTS, sodass sich die Investition innerhalb von 12 Monaten amortisiert“, so Alexander Mühlens.
ReBeL Move lässt sich innerhalb einer Stunde in Betrieb nehmen Das neue FTS-System ist nicht nur kostengünstiger als vergleichbare Lösungen, sondern auch besonders leicht in Betrieb zu nehmen – ähnlich schnell wie ein Rasenmähroboter. In weniger digitalisierten Unternehmen funktioniert das FTS als eigenständiges System, das lediglich eine WLAN-Verbindung benötigt. Für die Konfiguration bewegt der Betreiber das Fahrzeug mit einem Handcontroller entlang der zukünftigen Arbeitsbereiche. Der ReBeL Move verfügt über eine 360-Grad-Kamera und erstellt mithilfe der sogenannten Slam-Technologie während der Rundfahrt automatisch eine Digitalkarte. Auf dem Tablet kann der Betreiber nach dieser ersten Kartierungsfahrt dann einzelne Stationen zum Arbeiten, Warten und Aufladen festlegen. Ebenso No-go-Areas wie Bereiche rund um Treppen und Fahrstühle oder Zonen, in denen der Roboter mit reduzierter Geschwindigkeit fahren soll, um Mitarbeiter nicht zu stören. In der physischen Realität erkennt der mobile Roboter die Zielorte dann mithilfe einer Kamera und Reflektoren an den einzelnen Stationen, ohne dass der Betreiber aufwendig Leitlinien oder Spuren auf dem Boden installieren müsste.
Kinderleicht festlegen lassen sich über das Tablet zudem die Jobs, die der ReBeL Move in der Intralogistik erledigen soll, etwa mit dem ReBeL Cobot an Station A Produkte aus einem Gebinde entnehmen und zu Station B transportieren. Teil der Lösung ist darüber hinaus eine Software, die ein intelligentes Flottenmanagement ermöglicht, sodass mehrere FTS effizient zusammenarbeiten können. „Die gesamte Inbetriebnahme ist so leicht, dass Anwender innerhalb von 15 Minuten einfache Jobs programmieren können“, sagt Mühlens. Auch die Einbindung in gewachsene IT-Landschaften, die beispielsweise ein synchronisiertes Zusammenspiel von Robotern und automatischen Rolltoren ermöglicht, ist dank Schnittstellen wie IoT, VDA 5050, REST, SAP und ERP kein Problem. Mühlens: „Da die Inbetriebnahme so schnell funktioniert, können wir bei interessierten Kunden jederzeit vor Ort kleine Automationslösungen simulieren und ihnen somit die Berührungsangst mit der Technologie nehmen. Zum Kaufmodell haben wir zusätzlich auch ein Mietmodell im Angebot.“
Studentisches Team der Hochschule Osnabrück und der Universität Osnabrück erzielt herausragenden Erfolg beim Internationalen Feldroboter-Wettbewerb und stellt Kompetenz, Innovationskraft und Teamgeist unter Beweis
Foto: Hochschule Osnabrück (Andreas Linz)
(lifePR) (Osnabrück, 23.08.2024) Das studentische Team der Hochschule Osnabrück und der Universität Osnabrück hat beim diesjährigen Internationalen Feldroboter-Wettbewerb einen bemerkenswerten Erfolg erzielt. Das Team sicherte sich eine Gold- und vier Bronzemedaillen und bewies damit erneut Osnabrücks herausragende Kompetenz in der Feldrobotik.
Feldroboter-Wettbewerb: traditionell innovativ
Das traditionsreiche Event fand bereits zum 21. Mal statt – in diesem Jahr während der Feldtage der Deutschen Landwirtschafts-Gesellschaft (DLG) auf Gut Brockhof in Erwitte. Studierende – diesmal waren es zwölf Teams aus fünf europäischen Ländern – messen sich dabei in verschiedenen Disziplinen. Beim Bauen und Programmieren ihrer Feldroboter greifen sie auf neueste Technologien zurück und lernen, fachübergreifend und zielorientiert zusammenzuarbeiten.
Osnabrücker Team Acorn
Das Team Acorn bestand aus 17 Studierenden der Hochschule Osnabrück und der Universität Osnabrück. Unter der Leitung von den Kapitänen Philipp Gehricke (Hardware) und Justus Braun (Software) arbeiteten die Teammitglieder aus den Studiengängen der Informatik, Cognitive Science und Mechatronic Systems Engineering eng zusammen. Sie wurden mit einem beeindruckenden dritten Platz in der Gesamtwertung belohnt – hinter den Teams FREDT aus Braunschweig und Carbonite vom Schülerforschungszentrum Überlingen, die sich den ersten Platz geteilt haben. Unterstützt wurde das Osnabrücker Team von den wissenschaftlichen Mitarbeitern Andreas Linz (Hochschule Osnabrück) sowie Alexander Mock und Isaak Ihorst (Universität Osnabrück). Wichtige Sponsoren wie AMAZONEN-WERKE H. DREYER SE & Co. KG, CLAAS KGaA mbH, iotec GmbH und Allied Vision Technologies GmbH trugen ebenfalls zum Erfolg des Teams bei.
Goldmedaille für klassischen Ansatz in mobiler Robotik
In einer der anspruchsvollsten Aufgaben des Wettbewerbs ging es darum, bereits kartierte Pflanzen präzise anzufahren und zu behandeln. Hier überzeugte der Roboter des Teams Acorn mit einem außergewöhnlich hohen Grad an Autonomie. Trotz des Verbots von GPS konnte der Roboter die vorgegebenen Punkte präzise anfahren. „Wir haben dafür eine Technologie verwendet, die sonst in der klassischen Indoor-Robotik, also in Innenräumen, für die Pfadplanung und Ausführung eingesetzt wird“, erklärt Justus Braun. Philipp Gehricke ergänzt: „Für die Blumenbehandlung haben wir eine spezielle Vorrichtung konstruiert, um die punktgenau Schiedsrichterspray sprühen zu können.“ Ein anschließender Test zeigte zudem, dass der Osnabrücker Roboter über Stunden hinweg komplett eigenständig arbeiten konnte und sich sogar an verändernde Bedingungen anpasste – etwa Menschenbewegungen auf dem Feld. Die Leistung des Teams überzeugte die internationale Fachjury und führte schließlich zur verdienten Goldmedaille.
Vier Bronzemedaillen in verschiedenen Kategorien
Neben der Goldmedaille konnte das Team Acorn in mehreren weiteren Aufgaben überzeugen und sicherte sich insgesamt vier Bronzemedaillen in den Kategorien „Navigation durch Maisreihen“, „Finden und Kartieren von Blumen“, „Freistil“ sowie in der Gesamtwertung des Wettbewerbs. So navigierte Acorn erfolgreich durch vier Maisreihen, ohne eine einzige Pflanze zu beschädigen. Entscheidend waren dafür neben einer intelligenten Konstruktion auch eine durchdachte Software, die Höhenunterschiede auf dem Feld analysierte und daraus die Befahrbarkeit einzelner Strecken berechnete. Beim Finden und Kartieren von Blumen untersuchte der Roboter des Osnabrücker Teams die meiste Fläche des Spielfelds und erkannte auch die meisten Blumen. Für die Bilderkennung hat das Team Künstliche Intelligenz eingesetzt. Abzüge aufgrund von Ungenauigkeiten führten hier zu Platz drei. Im Freistil-Wettbewerb stellte das Team eine Lösung für präzises Säen vor: Eine Drohne erkannte fehlenden Rasen und der Roboter verteilte selbständig Rasensamen auf den kahlen Stellen.
Moderne Technologien für nachhaltige Landwirtschaft
Das Betreuerteam freut sich über den beeindruckenden Erfolg der Osnabrücker Studierenden: „Ein Platz auf dem Siegertreppchen bei einem anspruchsvollen internationalen Wettbewerb unterstreicht die hohe Kompetenz und Innovationskraft unserer beiden Hochschulen im Bereich der Robotik“, so Andreas Linz. Sein Kollege Alexander Mock betont: „Damit setzt das studentische Team Maßstäbe für zukünftige Wettbewerbe. Es nutzt bestehende und entwickelt neue Technologien, die das Potenzial haben, die Landwirtschaft nachhaltig zu verändern.“
Zum Hintergrund:
Dem Team Acorn gehören Studierende der Hochschule Osnabrück und der Universität Osnabrück an:
Justus Braun (Kapitän Software), Philipp Gehricke (Kapitän Hardware), Marco Tassemeier, Simon Balzer, Marc Meijer, Christopher Sieh, Piper Powell, Can-Leon Petermöller, Andreas Klaas, Lena Brüggemann, Lara Lüking, Jannik Jose, Leon Rabius, Thorben Boße, Ole Georg Oevermann, Till Stückemann und Gerrit Lange.
Veranstalter des Field Robot Events 2024 waren:
Die Hochschule Osnabrück mit Prof. Dr. Stefan Stiene, Silke Becker und Andreas Linz
Die Technische Hochschule Ostwestfalen-Lippe mit Prof. Dr. Burkhard Wrenger und Carsten Langohr
Agrotech Valley Forum e. V. mit Geschäftsführer Robert Everwand, Francisca Wesner und Karen Sommer
Die Münchener Robotise Technologies GmbH realisiert autonomen Roboterkellner mit platzsparenden Energieketten von igus
Köln, 11. Juli 2024 – Nach einem langen Tag am Strand das Hotelzimmer genießen, mit einem Drink aus der guten alten Minibar. Das sieht in einigen Hotels schon anders aus. Dort klingelt zur Überraschung der Gäste stattdessen JEEVES an der Tür – ein Roboter des Münchener Unternehmens Robotise Technologies GmbH. Der kellnernde Serviceroboter ersetzt bis zu 300 Minibars und entlastet Hotels in Zeiten des Fachkräftemangels. Damit er seinem Job ohne Störungen nachgehen kann, vertrauen die Ingenieure bei der Führung der sensiblen Energie- und Datenleitungen auf platzsparende und ausfallsichere Energieketten von igus.
Bei Durst oder Hunger genügt ein Anruf mit dem Zimmertelefon oder eine Nachricht via App, um JEEVES, der optisch an R2D2 aus Star Wars erinnert, zu aktivieren. Der 124 cm hohe und 100 kg schwere Serviceroboter, ausgestattet mit Lasersystem, 3D-Kamera und Abstandssensoren, fährt dann autonom zum Zimmer des Gastes, sogar mit dem Fahrstuhl. Am Zimmer angekommen macht JEEVES per Telefonanruf oder App-Benachrichtigung auf sich aufmerksam. Der Gast öffnet die Tür, wählt und bezahlt über ein großes Touchdisplay sein Produkt – etwa ein kühles Bier, einen Energydrink oder eine Packung Erdnüsse. Daraufhin öffnet sich automatisch eine der vier Schubladen und gibt das gewählte Produkt frei. Nur eine technische Spielerei? Viel mehr als das, ist die Robotise Technologies GmbH überzeugt. Hotels können sich mit nur einem Roboter das Auffüllen und Säubern von 300 Minibars ersparen und gleichzeitig die Energie für die kleinen Kühlschränke von der Stromrechnung streichen. Davon profitieren könnten in Zukunft auch Messen, Kantinen, Büros, Flughäfen, Museen und Restaurants.
Eine Achillesferse des Roboters: die Führung von Energie- und Datenleitungen JEEVES demonstriert eindrucksvoll, wie die Automatisierung immer weiter in das Leben der Menschen Einzug hält. Diese Entwicklung setzt jedoch technische Zuverlässigkeit voraus. „Ein defekter Roboterkellner würde sofort den Unmut der Gäste auf sich ziehen“, erklärt Clemens Beckmann, Head of Engineering bei Robotise Technologies. „Deshalb haben wir großen Wert daraufgelegt, JEEVES so zuverlässig wie möglich zu konstruieren.“ Eine typische Achillesferse war dabei die Führung der Leitungen im Inneren des Roboters, die für den Transfer von Energie und Daten zuständig sind – etwa zu den Sensoren in den ausfahrbaren Fächern, mit denen der Roboter eingelegte und entnommene Produkte erkennen kann. Schnell könnte es passieren, dass die Leitungen zu stark gebogen werden und brechen oder an der Kühlplatte des Kühlschranks festfrieren. „Um dies zu verhindern und eine kontrollierte sowie ausfallsichere Bewegung der Leitungen mit einem fest definiertem Biegeradius zu gewährleisten, entschieden wir uns für Energieketten der Serie E2.10 von igus“, so Beckmann.
e-ketten von igus sorgen für maximalen Stauraum und Ruhe Die Serie E2.10 von igus überzeugte den Ingenieur vor allem durch ihre platzsparende Bauweise, die viel Stauraum für die Produkte schafft. Die e-ketten, die Energie- und Datenleitungen sicher aufnehmen, sind über den Führungsschienen der Schubladen montiert, haben eine Innenbreite von 18 mm, eine Innenhöhe von 10 mm und einen Biegeradius von nur 28 mm. Damit sind die e-ketten, laut der Robotise Technologies GmbH, die kompakteste Lösung, die auf dem Markt zu finden war. Darüber hinaus punkten sie mit hoher Ausfallsicherheit und Langlebigkeit, da sie aus einem Hochleistungskunststoff bestehen, der hohe Beständigkeit gegen Verschleiß und Abrieb bietet und für den Einsatz in einem breiten Temperaturbereich geeignet ist. Diese Robustheit reduziert die Wahrscheinlichkeit von Serviceeinsätzen, was sich positiv auf die Wirtschaftlichkeit des Roboters auswirke, der europaweit zum Einsatz kommen soll. Zudem bewegen sich die Kettenglieder besonders geräuscharm, sodass die Leitungsführung beim Öffnen und Schließen der Produktfächer keine störenden Geräusche verursacht.
Bleibt abschließend nur noch eine Frage: Warum heißt der Roboter JEEVES? Die Antwort: JEEVES ist eine ikonische Figur aus den Romanen des englischen Autors P.G. Wodehouse. Er ist der Diener der Romanfigur Bertie Wooster und steht für besten und diskretesten Service.
At VivaTech 2024, the United Robitics Group (URG) will be showing the new product in action – together with other robots from the URG fleet, which are fully adapted to the needs of retailers.
uLink is a highly flexible, versatile platform for rapid adaptation and support in logistics and automation.
uLink is the first URG solution with an open API for seamless integration with operating systems and greater operational flexibility.
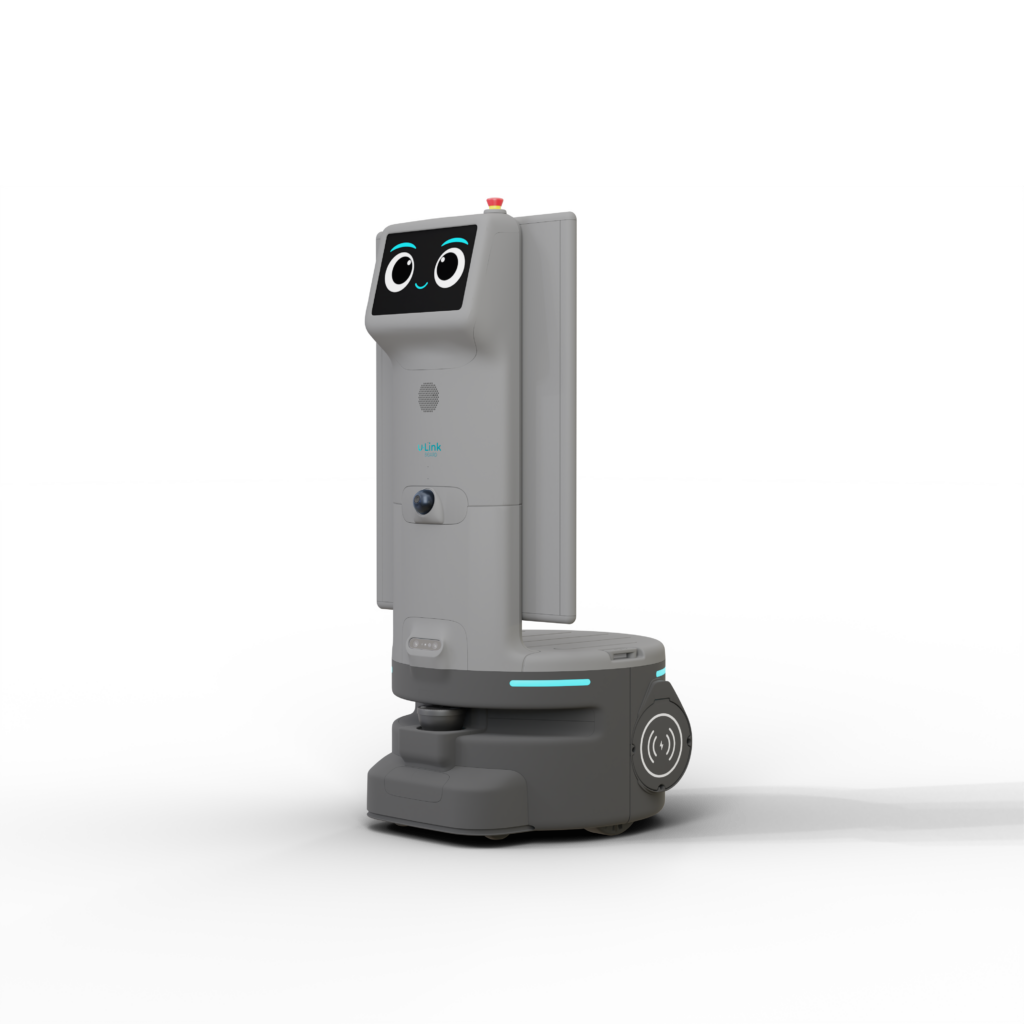
Paris/Bochum, May 22, 2024 – At VivaTech in Paris, the United Robotics Group will be presenting its new service robots from the uLink series for the first time, which are characterized by easy integration, flexible customization and individual extensions. They are suitable for use in retail, warehouse logistics and manufacturing. As the European market leader for service robotics solutions, URG is expanding its CobiotX portfolio worldwide with the latest Cobiot for integrated workflows in the aforementioned segments. The modular platform fits seamlessly into the respective workflows and can be expanded with industry-standard accessories. uLink is designed to simplify operations and increase safety and efficiency in various environments. The unique combination of features sets new standards in the industry – from modular design and open API to 3D LiDAR-based navigation and real-time operational data visualization.
uLink is equipped with IDE, SDK and fleet management tools and allows the seamless integration and control of various components such as LiDARS, engines or sensors. Thanks to powerful software functions for configuring and managing robot applications, as well as sensors and accessories, the robot can easily handle various logistics challenges in trade and warehousing, which vary depending on the industry, company size and automation requirements. The uLink accessory interface is also modular, so that the usable area can carry a payload of up to 60 kg. The SEER navigation control allows deliveries in a predefined area of up to 400,000 m².
With the help of the plug-and-play mechanism, other accessories such as a locker for Click & Collect or confidential deliveries, a pegboard for the delivery of tools and spare parts, and trays for transporting stock can be integrated into the platform. In addition, partner integrators can develop new accessories to meet specific requirements.
„The retail and logistics sector has been undergoing a profound transformation for years, related to the growth of e-commerce, automation and the shortage of skilled workers in the value chain. Whether it’s shelf replenishers or water-spiders, i.e. those responsible for inventory in warehouses or production: it is important to support the players and offer solutions that meet their specific needs,“ explains Thomas Linkenheil, Co-CEO of the United Robotics Group. „In a highly competitive sector, consumers want a fast and personalized service. Our new logistics solution enables service providers to offer up-to-date customer service without long searches in the warehouse or tedious processes that can cost time and affect customer business.“
First Cobiot with an open API for connectivity and flexibility
Like all CobiotX solutions from the United Robotics Group, uLink is also equipped with a particularly user-friendly user interface. It is based on the no-code principle and enables users without robotics knowledge to quickly integrate into daily operations. In addition, uLink has an open API platform. This allows the solution to communicate with existing operations and other connected systems such as automatic doors or elevators, and also work with other robots and automated guided vehicles such as AMRs and AGVs.
With the launch of uLink, United Robotics Group is expanding its range of robotics solutions for logistics, warehouse management and industrial manufacturing. The robot is intended to be used in retail and logistics environments such as department stores, supermarkets, warehouses and fulfillment centers, but also factories and production facilities as well as airports and healthcare facilities.
The robot is equipped with 3D LiDAR and PL LiDAR systems for maximum precision in mobility. The platform can immediately register changes in the environment such as certain movements or people or machines and react accordingly. It is connected to an online dashboard that facilitates both workflow management and quick decisions between front- and back-of-house teams.
uLink has a long battery life of up to 14 hours on a single charge. In addition, the solution has an intelligent, wireless charging function that was developed with a well-known German battery manufacturer. This allows it to automatically return to the charging station between individual operations. The robot complies with the highest security and privacy standards, including the EU’s Performance Level D Machinery Directive and GDPR regulations.
uLink, along with United Robotics Group’s logistics and warehouse management fleet, including RBWatcher and MobilePalletizer, will be on display at the company’s VivaTech booth (Hall 1, Booth G18) in Paris from May 22-25.
uLink can be rented via the RaaS (Robot as a Service) model of the United Robotics Group from 699 euros / month or purchased for 19,900 euros.
Auf der VivaTech 2024 zeigt die United Robitics Group (URG) die Produktneuheit in Aktion – gemeinsam mit anderen Robotern aus der URG-Flotte, die vollständig an die Bedürfnisse des Einzelhandels angepasst sind.
uLink ist eine hochflexible, vielseitige Plattform für eine schnelle Anpassung und Unterstützung in Logistik und Automatisierung.
uLink ist die erste URG-Lösung mit offener API für eine nahtlose Integration in Betriebssysteme und eine größere betriebliche Flexibilität.
Paris/Bochum, 22. Mai 2024– Die United Robotics Group stellt auf der VivaTech in Paris erstmalig ihre neuen Serviceroboter aus der uLink-Serie vor, die sich durch einfache Integration, flexible Anpassung und individuelle Erweiterungen auszeichnen. Sie eignen sich für den Einsatz im Handel, der Lagerlogistik sowie im Fertigungsbereich. Als europäischer Marktführer für Servicerobotik-Lösungen erweitert die URG ihr CobiotX-Portfolio weltweit um den neuesten Cobiot für integrierte Arbeitsabläufe in den genannten Segmenten. Die modulare Plattform fügt sich nahtlos in die jeweiligen Workflows ein und kann mit Industriestandard-Zubehör erweitert werden. uLink wurde entwickelt, um Betriebsabläufe zu vereinfachen und die Sicherheit und Effizienz in verschiedenen Umgebungen zu erhöhen. Die einzigartige Kombination von Funktionen setzt neue Standards in der Branche – vom modularen Design und der offenen API bis hin zur 3D-LiDAR-basierten Navigation und der Echtzeit-Betriebsdatenvisualisierung.
uLink ist mit IDE-, SDK- sowie Flottenmanagement-Tools ausgestattet und erlaubt die nahtlose Integration und Steuerung verschiedener Komponenten wie LiDARS, Motoren oder Sensoren. Dank leistungsstarker Softwarefunktionen für die Konfiguration und Verwaltung von Roboteranwendungen, aber auch mittels Sensoren und entsprechendem Zubehör kann der Roboter verschiedene logistische Herausforderungen im Handel und in der Lagerhaltung problemlos bewältigen, die je nach Branche, Betriebsgröße und Automatisierungsanforderungen variieren. Die uLink-Zubehörschnittstelle ist ebenfalls modular aufgebaut, so dass die Nutzungsfläche eine Nutzlast von bis zu 60 kg tragen kann. Die SEER-Navigationssteuerung erlaubt Lieferungen in einem vordefinierten Bereich von bis zu 400.000 m².
Mit Hilfe des Plug-and-Play-Mechanismus, können weitere Zubehörkomponenten wie ein Schließfach für Click & Collect oder vertrauliche Lieferungen, ein Pegboard für die Lieferung von Werkzeugen und Ersatzteilen sowie Tabletts für den Transport von Lagerbeständen in die Plattform integriert werden. Darüber hinaus können die Partner-Integratoren neue Zubehörteile entwickeln, um spezifische Anforderungen zu erfüllen.
„Der Einzelhandels- und Logistiksektor befindet sich seit Jahren in einem tiefgreifenden Wandel, der mit dem Wachstum des E-Commerce, der Automatisierung und dem Mangel an Fachkräften in der Wertschöpfungskette zusammenhängt. Ob Regalauffüller oder Water-Spider, also Verantwortliche für den Bestand in Lagern oder der Fertigung: Wichtig ist, die Akteure zu unterstützen und Lösungen anzubieten, die den spezifischen Bedürfnissen entsprechen“, erklärt Thomas Linkenheil, Co-CEO der United Robotics Group. „In einem hart umkämpften Sektor wollen die Verbraucher einen zügigen und personalisierten Service. Unsere neue Logistiklösung versetzt Dienstleister in die Lage, einen zeitgemäßen Kundenservice ohne langes Suchen im Warenlager oder mühsame Prozesse anzubieten, die Zeit kosten und das Kundengeschäft beeinträchtigen können.“
Erster Cobiot mit offener API für Konnektivität und Flexibilität
Wie alle CobiotX-Lösungen der United Robotics Group ist auch uLink mit einer besonders benutzerfreundlichen Bedienoberfläche ausgestattet. Sie basiert auf dem No-Code-Prinzip und ermöglicht Anwendern ohne Robotik-Kenntnisse eine schnelle Integration in den täglichen Betrieb. Darüber hinaus verfügt uLink über eine offene API-Plattform. So kann die Lösung mit bestehenden Betriebsabläufen und anderen vernetzten Systemen wie automatischen Türen oder Aufzügen kommunizieren und auch mit anderen Robotern und fahrerlosen Transportfahrzeugen wie AMRs und AGVs zusammenarbeiten.
Mit der Markteinführung von uLink erweitert die United Robotics Group ihr Angebot an Robotik-Lösungen für die Bereiche Logistik, Lagerverwaltung und industrielle Fertigung. Der Roboter soll in Einzelhandels- und Logistikumgebungen wie Kaufhäusern, Supermärkten, Lagerhäusern und Fulfillment-Zentren, aber auch Fabriken und Produktionsstätten sowie Flughäfen und Gesundheitseinrichtungen zum Einsatz kommen.
Der Roboter ist mit 3D-LiDAR- und PL-LiDAR-Systemen für maximale Präzision bei der Mobilität ausgestattet. Die Plattform kann Änderungen in der Umgebung wie bestimmte Bewegungen oder Personen bzw. Maschinen sofort registrieren und entsprechend reagieren. Dabei ist er mit einem Online-Dashboard verbunden, das sowohl das Workflow-Management als auch schnelle Entscheidungen zwischen Front- und Back-of-House-Teams erleichtert.
uLink hat eine lange Akkulaufzeit von bis zu 14 Stunden mit einer Ladung. Zudem verfügt die Lösung über eine intelligente, kabellose Ladefunktion, die mit einem namhaften deutschen Batteriehersteller entwickelt wurde. Damit kann sie zwischen einzelnen Arbeitsgängen automatisch zur Ladestation zurückkehren. Der Roboter entspricht den höchsten Sicherheits- und Datenschutzstandards, einschließlich der EU-Maschinenrichtlinie „Performance Level D“ sowie den DSGVO-Vorschriften.
uLink wird zusammen mit der Logistik- und Lagerverwaltungsflotte der United Robotics Group einschließlich RBWatcher und MobilePalletizer vom 22. bis 25. Mai auf dem VivaTech-Stand des Unternehmens (Halle 1, Stand G18) in Paris zu sehen sein.
uLink kann über das RaaS-Modell (Robot as a Service) der United Robotics Group ab 699 Euro / Monat gemietet oder für 19.900 Euro erworben werden.
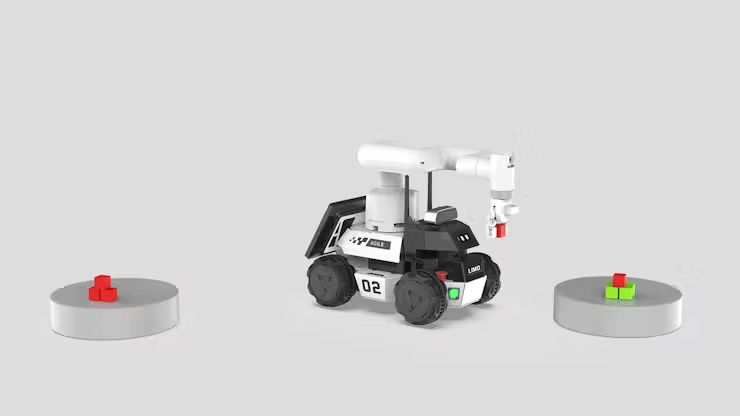
This article primarily introduces the practical application of LIMO Cobot by Elephant Robotics in a simulated scenario. You may have seen previous posts about LIMO Cobot’s technical cases, A[LINK], B[LINK]. The reason for writing another related article is that the original testing environment, while demonstrating basic functionality, often appears overly idealized and simplified when simulating real-world applications. Therefore, we aim to use it in a more operationally consistent environment and share some of the issues that arose at that time.
2. Comparing the Old and New Scenarios:
First, let’s look at what the old and new scenarios are like.
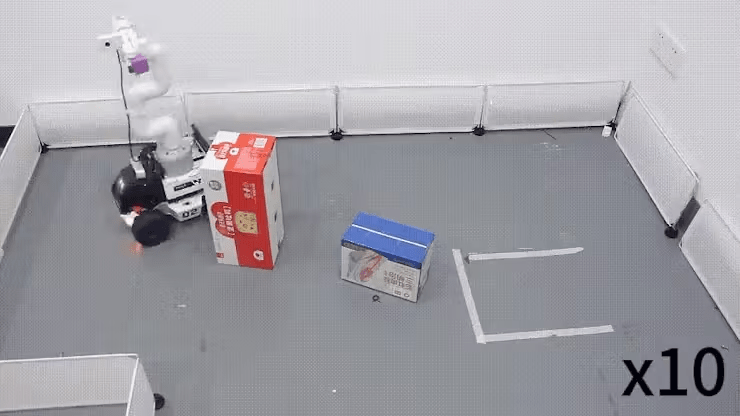
Old Scenario: A simple setup with a few obstacles, relatively regular objects, and a field enclosed by barriers, approximately 1.5m*2m in size.
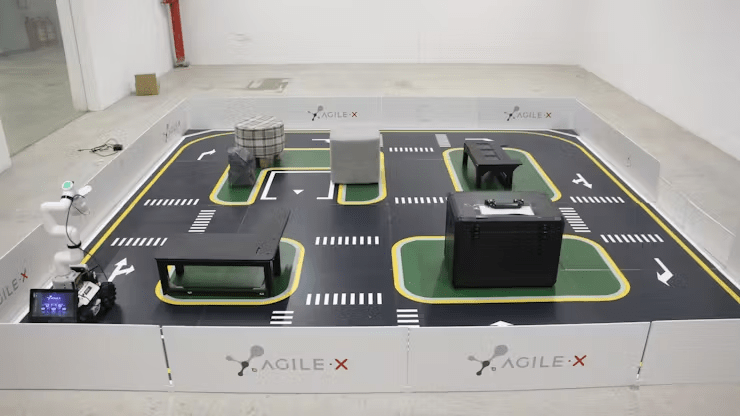
New Scenario: The new scenario contains a wider variety of obstacles of different shapes, including a hollowed-out object in the middle, simulating a real environment with road guidance markers, parking spaces, and more. The size of the field is 3m*3m.
The change in environment is significant for testing and demonstrating the comprehensiveness and applicability of our product.
3. Analysis of Practical Cases:
Next, let’s briefly introduce the overall process.
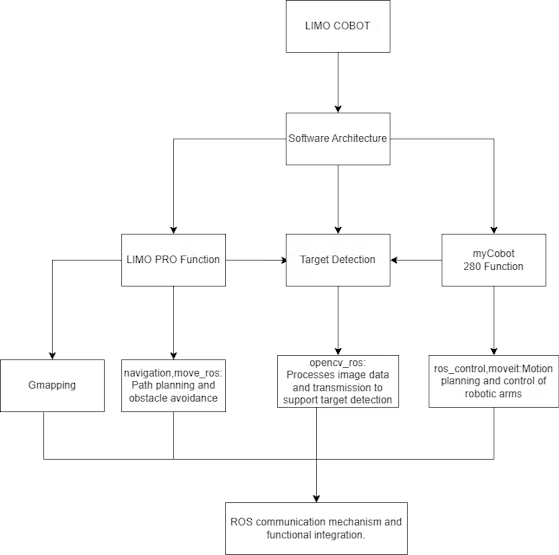
The process is mainly divided into three modules: one is the functionality of LIMO PRO, the second is machine vision processing, and the third is the functionality of the robotic arm. (For a more detailed introduction, please see the previous article [link].)
LIMO PRO is mainly responsible for SLAM mapping, using the gmapping algorithm to map the terrain, navigate, and ultimately achieve the function of fixed-point patrol.
myCobot 280 M5 is primarily responsible for the task of grasping objects. A camera and a suction pump actuator are installed at the end of the robotic arm. The camera captures the real scene, and the image is processed by the OpenCV algorithm to find the coordinates of the target object and perform the grasping operation.
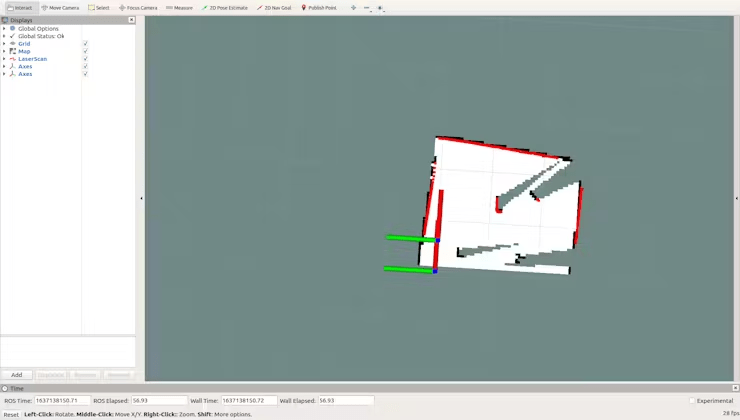
Then, start the gmapping mapping algorithm by opening another new terminal and entering the command:
roslaunch limo_bringup limo_gmapping.launch
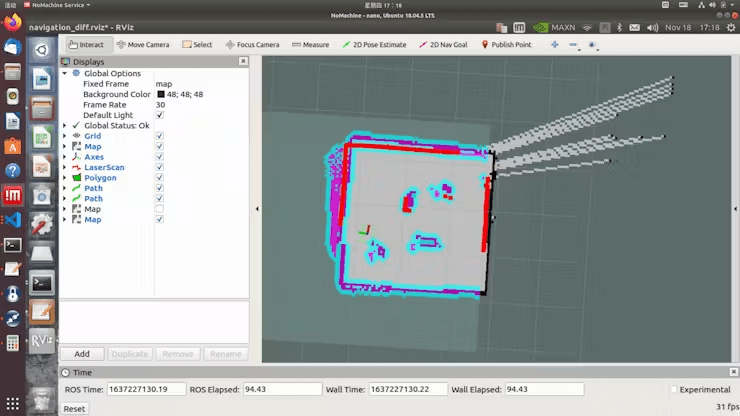
After successful startup, the rviz visualization tool will open, and you will see the interface as shown in the figure.
At this point, you can switch the controller to remote control mode to control the LIMO for mapping.
After constructing the map, you need to run the following commands to save the map to a specified directory:
1. Switch to the directory where you want to save the map. Here, save the map to `~/agilex_ws/src/limo_ros/limo_bringup/maps/`. Enter the command in the terminal:
cd ~/agilex_ws/src/limo_ros/limo_bringup/maps/
2. After switching to `/agilex_ws/limo_bringup/maps`, continue to enter the command in the terminal:
rosrun map_server map_saver -f map1
This process went very smoothly. Let’s continue by testing the navigation function from point A to point B.
Navigation:
1. First, start the radar by entering the following command in the terminal:
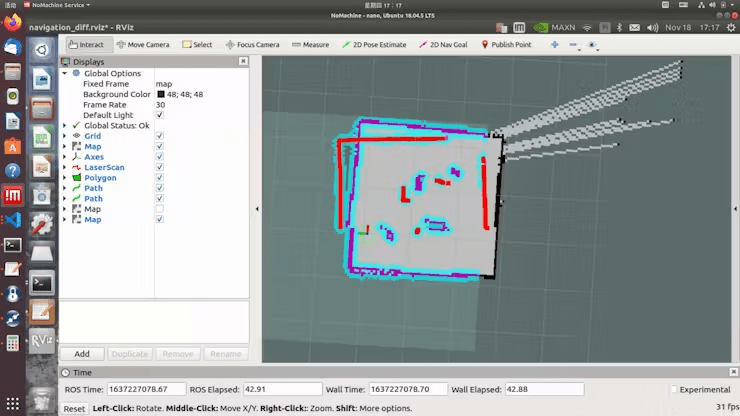
Upon success, this interface will open, displaying the map we just created.
Click on „2D Pose Estimate, “ then click on the location where LIMO is on the map. After starting navigation, you will find that the shape scanned by the laser does not overlap with the map. You need to manually correct this by adjusting the actual position of the chassis in the scene on the map displayed in rviz. Use the tools in rviz to publish an approximate position for LIMO. Then, use the controller to rotate LIMO, allowing it to auto-correct. When the shape of the laser scan overlaps with the shapes in the map’s scene, the correction is complete, as shown in the figure where the scanned shape and the map overlap.
Click on „2D Nav Goal“ and select the destination on the map for navigation.
The navigation test also proceeds smoothly.
Next, we will move on to the part about the static robotic arm’s grasping function.
Identifying and Acquiring the Pose of Aruco Codes
To precisely identify objects and obtain the position of the target object, we processed Aruco codes. Before starting, ensure the specific parameters of the camera are set.
Initialize the camera parameters based on the camera being used.
Then, identify the object and estimate its pose to obtain the 3D position of the object and output the position information.
def estimatePoseSingleMarkers(self, corners): """ This will estimate the rvec and tvec for each of the marker corners detected by: corners, ids, rejectedImgPoints = detector.detectMarkers(image) corners - is an array of detected corners for each detected marker in the image marker_size - is the size of the detected markers mtx - is the camera matrix distortion - is the camera distortion matrix RETURN list of rvecs, tvecs, and trash (so that it corresponds to the old estimatePoseSingleMarkers()) """ marker_points = np.array([[-self.marker_size / 2, self.marker_size / 2, 0], [self.marker_size / 2, self.marker_size / 2, 0], [self.marker_size / 2, -self.marker_size / 2, 0], [-self.marker_size / 2, -self.marker_size / 2, 0]], dtype=np.float32) rvecs = [] tvecs = [] for corner in corners: retval, rvec, tvec = cv2.solvePnP(marker_points, corner, self.mtx, self.dist, False, cv2.SOLVEPNP_IPPE_SQUARE) if retval: rvecs.append(rvec) tvecs.append(tvec)
The steps above complete the identification and acquisition of the object’s information, and finally, the object’s coordinates are returned to the robotic arm to execute the grasping.
Robotic Arm Movement and Grasping Operation
Based on the position of the Aruco marker, calculate the target coordinates the robotic arm needs to move to and convert the position into a coordinate system suitable for the robotic arm.
def homo_transform_matrix(x, y, z, rx, ry, rz, order="ZYX"): rot_mat = rotation_matrix(rx, ry, rz, order=order) trans_vec = np.array([[x, y, z, 1]]).T mat = np.vstack([rot_mat, np.zeros((1, 3))]) mat = np.hstack([mat, trans_vec]) return mat
If the Z-axis position is detected as too high, it will be corrected:
if end_effector_z_height is not None: p_base[2] = end_effector_z_height
After the coordinate correction is completed, the robotic arm will move to the target position.
# Concatenate x, y, z, and the current posture into a new array new_coords = np.concatenate([p_base, curr_rotation[3:]]) xy_coords = new_coords.copy()
Then, control the end effector’s API to suction the object.
The above completes the respective functions of the two robots. Next, they will be integrated into the ROS environment.
#Initialize the coordinates of point A and B
goal_1 = [(2.060220241546631,-2.2297520637512207,0.009794792000444471,0.9999520298742676)] #B
goal_2 = [(1.1215190887451172,-0.002757132053375244,-0.7129997613218174,0.7011642748707548)] #A
#Start navigation and link the robotic arm
map_navigation = MapNavigation()
arm = VisualGrasping("10.42.0.203",9000)
print("connect successful")
arm.perform_visual_grasp(1,-89)
# Navigate to location A and perform the task
for goal in goal_1:
x_goal, y_goal, orientation_z, orientation_w = goal
flag_feed_goalReached = map_navigation.moveToGoal(x_goal, y_goal, orientation_z, orientation_w)
if flag_feed_goalReached:
time.sleep(1)
# executing 1 grab and setting the end effector's Z-axis height to -93.
arm.unload()
print("command completed")
else:
print("failed")
4. Problems Encountered
Mapping Situation:
When we initially tried mapping without enclosing the field, frequent errors occurred during navigation and localization, and it failed to meet our requirements for a simulated scenario.
Navigation Situation:
In the new scenario, one of the obstacles has a hollow structure.
During navigation from point A to point B, LIMO may fail to detect this obstacle and assume it can pass through, damaging the original obstacle. This issue arises because LIMO’s radar is positioned low, scanning only the empty space. Possible solutions include adjusting the radar’s scanning range, which requires extensive testing for fine-tuning, or adjusting the radar’s height to ensure the obstacle is recognized as impassable.
Robotic Arm Grasping Situation:
In the video, it’s evident that our target object is placed on a flat surface. The grasping did not consider obstacle avoidance for the object. In the future, when setting special positions for grasping, this situation needs to be considered.
5. Conclusion
Overall, LIMO Cobot performed excellently in this scenario, successfully meeting the requirements. The entire simulated scenario covered multiple core areas of robotics, including motion control of the robotic arm, path planning, machine vision recognition and grasping, and radar mapping navigation and fixed-point cruising functions of the mobile chassis. By integrating these functional modules in ROS, we built an efficient automated process, showcasing LIMO Cobot’s broad adaptability and advanced capabilities in complex environments.
Cologne/Hanover, April 24, 2024 – Mobile robotics systems are being used in more and more work areas, in e-commerce warehouses as well as in modern restaurants. Conventional models on the market start at around 25,000 euros, while solutions with an integrated robot arm start at around 70,000 euros. However, widespread use in the market is often unaffordable for small and medium-sized enterprises due to the high prices. igus wants to change this with new low-cost robotics offerings and is presenting a series of low-cost mobile plastic robots at the Hannover Messe.
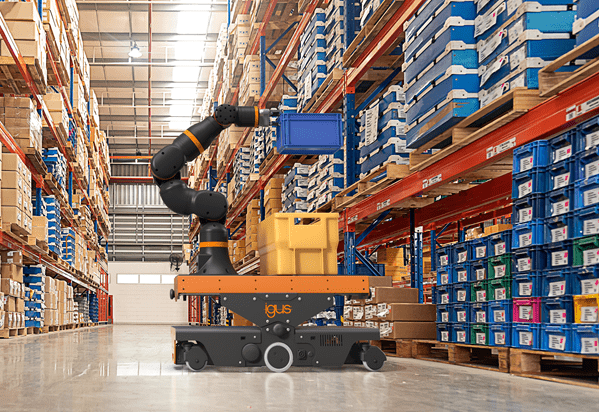
The market for Automated Guided Vehicles (AGV) and Autonomous Mobile Robots (AMR) is booming: The global market for mobile robotics, including service robotics, is currently worth around 20.3 billion US dollars, and experts expect it to almost double by 2028. 1 Mobile robots are particularly common in intralogistics and industrial applications. And even in the catering industry or in hospitals, the smart helpers are increasingly making their rounds. This is also the case at motion plastics specialist igus: For four years now, the plastics experts have been successfully testing AGVs in-house – driverless racks that deliver mail and deliveries to offices, as well as mobile robots in production that move transports and stack-and-turn containers. The experience gained flows directly into the development of a new low-cost automation product line, the „ReBeL on Wheels“. Their goal: to pave the way for small and medium-sized enterprises (SMEs) to use cost-effective mobile robotics.
Mobile ReBeL solutions for education, logistics and service The basis of any mobile robotics system is the ReBeL. The use of plastic makes the robot particularly affordable at 4,970 euros and, with a dead weight of 8.2 kilograms, the lightest service robot with cobot function in its class. All mechanical components that make up the ReBeL are developed and manufactured by igus without exception. It has a load capacity of 2 kilograms and a reach of 664 millimetres. Various mobile systems are planned in which the ReBeL is centrally integrated: igus is launching an affordable version for the education sector for 14,699 euros – including the robot arm. The ReBeL EduMove equipped with a gripper serves as an autonomous learning platform for educational institutions thanks to open source. It has a modular design and can be flexibly expanded to include additional functions such as lidar, camera technology or slam algorithm. Another variant is an automated guided vehicle system for SMEs. It can carry up to 30 kilograms. With the optional ReBeL, simple A-to-B positioning can be made. It dispenses with expensive sensor technology and instead relies on 3D sensor technology developed in-house. The price is 17,999 euros. In addition, igus will be showcasing a study of a service robot at a low price in Hanover. The ReBeL Butler is suitable for simple but time-consuming pick-up and drop-off services, for example in the hotel and catering industry.
A lighthouse project on wheels The goal of all these developments is the lighthouse project, a mobile robot with integrated HMI and vision that could even tidy up an office on its own. „With this project, we are pursuing a bottom-to-top strategy, in which certain components such as safety laser scanners are not included in the basic package in order to keep the price low,“ explains Alexander Mühlens, authorized signatory and head of the low-cost automation business unit at igus. „Nevertheless, it ensures that the solution can be retrofitted for industrial requirements.“ Among other things, igus is presenting an affordable gripper with a large stroke and travel this year, which offers a high degree of flexibility when gripping different geometries. Alexander Mühlens: „The areas of application for this targeted low-cost AMR are extremely diverse and go far beyond simple transport tasks. They encompass a huge range of applications in various areas of life, such as cleaning tasks or serving coffee directly at the workplace.“
„ReBeLs on Wheels“ machen durch moderne Kunststofftechnologie Fahrerlose Transportsysteme erschwinglich
Köln/Hannover, 24. April 2024 – Mobile Robotiksysteme kommen in immer mehr Arbeitsbereichen zum Einsatz, in E-Commerce-Lagerhallen ebenso wie in modernen Restaurants. Herkömmliche Modelle auf dem Markt starten bei etwa 25.000 Euro, Lösungen mit integriertem Roboterarm liegen bei rund 70.000 Euro. Ein flächendeckender Einsatz im Markt ist allerdings aufgrund der hohen Preise für kleine und mittlere Unternehmen häufig unerschwinglich. igus will das mit neuen Low-Cost-Robotik-Angeboten ändern und stellt zur Hannover Messe eine Serie günstiger mobiler Kunststoff-Roboter vor.
Der Markt für Automated Guided Vehicles (AGV) und Autonome Mobile Robots (AMR) boomt: Aktuell beträgt der globale Markt der mobilen Robotik inklusive Servicerobotik rund 20,3 Milliarden US-Dollar, bis 2028 erwarten Experten nahezu eine Verdoppelung.1 Besonders verbreitet sind mobile Roboter in der Intralogistik und in industriellen Anwendungsbereichen. Und selbst in der Gastronomie oder in Krankenhäusern drehen die smarten Helfer vermehrt ihre Runden. Auch beim motion plastics Spezialisten igus: Seit vier Jahren testen die Kunststoff-Experten bereits erfolgreich AGVs im eigenen Haus – fahrerlose Regale, die Post und Lieferungen in Büros ausfahren sowie mobile Roboter in der Fertigung, die Transporte und Drehstapelbehälter bewegen. Die gewonnenen Erfahrungen fließen direkt in die Entwicklung einer neuen Low-Cost-Automation-Produktlinie ein, den „ReBeL on Wheels”. Ihr Ziel: kleinen und mittleren Unternehmen (KMU) den Weg in eine kostengünstige mobile Robotik zu ebnen.
Mobile ReBeL Lösungen für Bildung, Logistik und Service Die Basis eines jeglichen mobilen Robotik-Systems ist der ReBeL. Der Einsatz von Kunststoff macht den Roboter mit 4.970 Euro besonders günstig und mit 8,2 Kilogramm Eigengewicht zum leichtesten Serviceroboter mit Cobot-Funktion in seiner Klasse. Alle mechanischen Bauteile, aus denen sich der ReBeL zusammensetzt, sind ausnahmslos von igus entwickelt und gefertigt. Seine Traglast beträgt 2 Kilogramm und er besitzt eine Reichweite von 664 Millimetern. Geplant sind verschiedene fahrende Systeme, in die der ReBeL zentral integriert ist: So startet igus mit einer erschwinglichen Variante für den Bildungssektor für 14.699 Euro – inklusive des Roboterarms. Der mit einem Greifer ausgestattete ReBeL EduMove dient dank Open Source als autonome Lernplattform für Bildungseinrichtungen. Er ist modular aufgebaut und lässt sich flexibel um weitere Funktionen wie Lidar, Kameratechnik oder Slam-Algorithmus erweitern. Eine weitere Variante ist ein Fahrerloses Transportsystem für KMU. Es kann bis zu 30 Kilogramm transportieren. Mit dem optionalen ReBeL lassen sich einfache A zu B Positionierungen vornehmen. Es verzichtet dabei auf teure Sensorik und setzt stattdessen auf eine eigenentwickelte 3D-Sensortechnik. Der Preis liegt bei 17.999 Euro. Darüber hinaus zeigt igus in Hannover die Studie eines Serviceroboters zum kleinen Preis. Der ReBeL Butler eignet sich für einfache, aber zeitaufwendige Hol-und-Bring-Dienste, beispielsweise im Hotel- und Gastrogewerbe.
Ein Leuchtturmprojekt auf Rädern Das Ziel all dieser Entwicklungen ist das Leuchtturmprojekt, ein mobiler Roboter mit integriertem HMI und Vision, der sogar eigenständig ein Büro aufräumen könnte. „Mit diesem Projekt verfolgen wir eine Bottom-to-Top-Strategie, bei der bestimmte Bauteile wie Sicherheits-Laserscanner nicht im Grundpaket enthalten sind, um den Preis niedrig zu halten“, macht Alexander Mühlens, Prokurist und Leiter des Geschäftsbereichs Low-Cost-Automation bei igus, deutlich. „Dennoch ist sichergestellt, dass die Lösung für industrielle Anforderungen nachgerüstet werden kann.“ Unter anderem stellt igus in diesem Jahr einen erschwinglichen Greifer mit großem Hub und Verfahrweg vor, der hohe Flexibilität beim Greifen unterschiedlicher Geometrien bietet. Alexander Mühlens: „Die Einsatzgebiete dieses angestrebten Low-Cost-AMRs sind äußerst vielfältig und gehen über einfache Transportaufgaben weit hinaus. Sie umfassen eine riesige Bandbreite an Anwendungen in verschiedenen Lebensbereichen, wie Reinigungsaufgaben oder die Ausgabe von Kaffee direkt am Arbeitsplatz.“
20.03.2023, St-Sulpice, Switzerland: MasterMover, the world’s leading manufacturer of electric tug and tow solutions, has announced a new partnership with vehicle automation leader BlueBotics to provide best-in-class ANT navigation technologies for MasterMover’s range of Automated Guided Vehicles.
Known for its broad portfolio of pedestrian operated electric tugs and electric tows, used across Industrial Manufacturing, Logistics, and Retail, MasterMover also offers a range of advanced solutions, spanning remote control operation, line follow navigation, and fully autonomous solutions.
MasterMover AGV products now include BlueBotics’ ANT natural navigation technology as standard, ensuring customers benefit from the advanced features and functionality available from the vehicle navigation market leader.
“MasterMover has twenty-five -years’ experience in designing, manufacturing, and delivering load moving solutions that are synonymous with reliability, quality, and performance,” commented James Jones, Partner and Director at MasterMover. “We are combining this expertise with world-class technology partners to deliver advanced solutions. These are increasingly being demanded by our customers who are focused on maximising safety and efficiency within their operations.”
BlueBotics is the global reference in natural feature navigation. For over 20 years, the Swiss company has helped companies meet the challenge of vehicle automation, and today there are more than 4,000 ‘ANT driven’ AGVs, automated forklifts, and AMRs in operation around the world.
“At BlueBotics our goal is to work with market-leading vehicle producers who have the expertise and experience needed to fully meet their customers’ AGV needs,” said Dr. Nicola Tomatis, CEO of BlueBotics. “Partnering with MasterMover is a great example of this. We have been continually impressed with the professionalism of both the company’s solutions and its team, and we look forward to enjoying much success together.”
MasterMover AGV solutions offer Industrial Manufacturing organisations an effective way to automate a range of load moving processes, delivering return-on-investment, and driving operational efficiency.
Autonomous solutions are available from MasterMover with the capacity to move up to 30,000kg, meaning the company is equipped to take on a wide range of load movement challenges with advanced solutions.
MasterMover is combining a strong track record of success in building powerful and reliable load moving products, with best-in-class technologies from market leaders such as BlueBotics. The company also works with safety technology specialists SICK for its AGV solutions.
“Partnering with BlueBotics was a natural choice, with their ANT navigation technology leading the way. The advanced capabilities of BlueBotics’ solutions, as well as their focus on innovation, mean they are the ideal navigation partner for MasterMover,” added Jones. “We have worked closely with the BlueBotics team on a number of projects, and the relationship between the two organisations will only go from strength to strength”.
For more information on MasterMover AGV solutions, please visit:
MasterMover is a world-leading manufacturer of electric tug and tow solutions, designed to improve safety and operational efficiency when moving heavy, large or unconventional loads. MasterMover focuses on innovation, research, and development to provide the widest range of electric tug products on the market.
Specialist solutions include pedestrian-operated, remotely controlled, and fully Automated Guided Vehicle (AGV) options. In addition, MultiLink technology allows a single remote operator to simultaneously control multiple electric tugs through synchronised movement.
MasterMover operates globally through direct relationships and a network of sales and service partners. The company works with an enviable range of world-leading names across industrial manufacturing, retail, and logistics. With an expert in-house engineering team, MasterMover has a proven track record of delivering bespoke projects for diverse applications around the world.
About BlueBotics
BlueBotics is the reference in natural feature navigation and has the mission to help companies meet the challenge of vehicle automation. With over 20 years of industry experience, the company provides the autonomous navigation technology (ANT) and expert support customers need to bring their AGV, automated forklift, or mobile robot successfully to market. Today, there are more than 4,000 ANT driven vehicles in operation worldwide. Visit www.bluebotics.com to learn more.
Waldkirch, Februar 2023 – SICK launcht den kompakten und präzisen 3D-LiDar-Sensor multiScan100. Damit unterstützt das Unternehmen die Entwicklung autonomer industrieller Fahrzeuge im Innen- und Außenbereich und verstärkt den Fokus auf digitale Softwarelösungen, um einen zusätzlichen Kundennutzen über die reinen Messdaten hinaus anzubieten.
Auf der letzten SPS in Nürnberg konnten die Besucher schon einen ersten Blick auf die neue multiScan100 Produktfamilie werfen, welche als eine Lösung für die Konturnavigation von industriellen Fahrzeugen ausgestellt wurde. Mit der ersten Variante, dem multiScan136, können mobile Plattformen wie AGVs oder Serviceroboter eigenständig eine neue Umgebung erkunden und davon eine Karte erstellen, die im Produktivbetrieb zur Navigation und Lokalisierung genutzt werden kann. Der LiDAR Sensor liefert 3D-Messdaten in Kombination einer hochauflösenden 0° Scanlage, die für eine präzise Selbstlokalisierung der autonomen Fahrzeuge bei gleichzeitiger Kartierung der Umgebung (SLAM, für Simultaneous Localization and Mapping) verwendet werden können. Darüber hinaus lassen sich durch die 3D-Punktewolke Absturzkanten oder Hindernisse erkennen.
Der 3D-LiDAR-Sensor multiScan136 mit 360° Rundumblick erreicht Dank der bis zu 690.000 Messpunkte eine State-of-the-Art Präzision, der nichts in seinem Umfeld entgeht. Mit seiner kompakten Bauform von circa 10 cm und industrieller Schnittstellen ist eine hohe Integrationsfreundlichkeit gewährleistet. Der Sensor lässt sich durch sein robustes Design und einer IP-Schutzklasse von bis zu 69k in rauen Umgebungen einsetzen. Durch die bewährte Multi-Echo-Technologie und seinem statistischen Messverfahren ist auch unter schlechten Bedingungen im Außenbereich eine präzise Umgebungserfassung sichergestellt. Somit ist der multiScan136 danke einer hohen Messgenauigkeit und einem geringen Messwertrauschen nicht nur für eine präzise Feinpositionierung im Innenbereich einsetzbar, sondern auch mühelos für die Umgebungserfassung im Außenbereich. Mit dem großen vertikalen Öffnungswinkel von 65° entgeht ihm dabei nichts, wodurch sich Kollisionen im Einsatz mobiler Outdoor Automation vermeiden lassen. Neben mobilen Anwendungen lässt sich der Sensor durch sein großes Sichtfeld auch für stationäre Anwendung im Objektschutz für Building Security (Objektsicherheit), Traffic (Verkehr) oder Smart City Applikationen wie Personenstromerfassung einsetzten.
Mit dem multiScan136 macht SICK einen weiteren Schritt in Richtung 3D-LiDAR Technologie und verstärkt den Fokus auf digitale Softwarelösungen, um einen zusätzlichen Kundennutzen über die reinen Messdaten hinaus anzubieten. Somit sind die präzisen Messdaten nur der erste Schritt für weitere Funktionen, die sich ohne weitere Recheneinheit direkt auf dem Sensor auswerten lassen.