2 years ago, the open source robotics project pib was launched. The goal of pib, the printable intelligent bot anyone can build themselves, is to lower the barriers and make robotics and AI accessible to anyone who is interested. Over the past two years, pib has built an active and dedicated community that supports the project in moving forward. Therefore, a lot has happened since the project launch – time to look back on how far pib has come.
Milestones, Challenges and What Comes Next
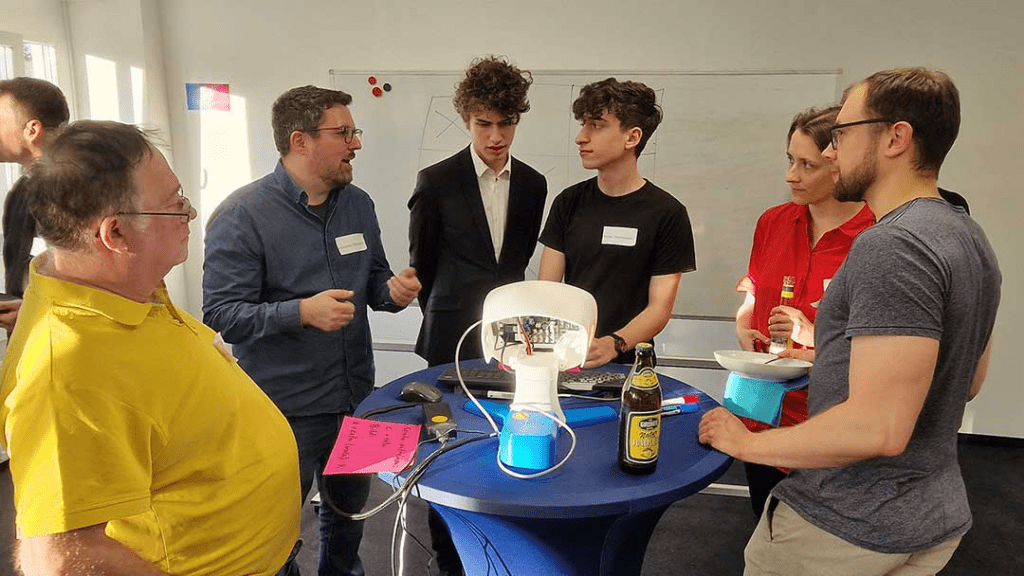
It’s not every day that a robot turns two years old, so the team celebrated with a big party. The all new pib documentary was streamed to kick off the event, followed by different stations for guests to experience pib’s newest features hands-on.
pib started out as an idea that slowly took shape in the form of a master thesis and a robotic arm. From there, a humanoid robot was created that can easily be 3D printed with the free 3D print files on the website and then built with the help of the building manuals online. pib offers many ways to implement AI trainings such as voice assistant technology, object detection, imitation and more.
For starters, the pib team and the community have optimized pib’s mobility in a joint effort. The result is impressive: In its newest version, pib can now move its arms at basically all angles. Another rapidly progressing topic is pib’s digital twin which received a birthday present by the community members that took on this project: The camera now works in the virtual environment, enabling the camera stream to be transmitted to the outside world to be analyzed there and then become the base of control processes.
Talk To Me, pib!
Aside from that, there has been some significant progress in the field of human-machine interaction, particularly focusing on enabling voice-based communication with pib through advanced voice assistant technology. Exploring the potential of natural speech interaction has become a significant area of the team’s current efforts and the project is committed to advancing pib’s capabilities in this direction.
One of the newest features that were revealed at the pib party is communication in a multimodal world. The robot captures an image, analyzes it, and then answers questions in relation to the image. For example, when asking pib “where are we right now?” it interprets the room and its setting and will answer something like “we are in an office space”.
With this new feature, pib was also able to play its first round of Tic Tac Toe. The team drew the gameboard on a whiteboard so that pib was able to analyze the current state of the game and determine the next move with commands such as “place the next X in the top right corner”.
Join The Community
The pib community is rapidly growing and consists of 3D printing, robotics and AI enthusiasts. Whether you’re a rookie or an expert, anyone is invited to join, share their ideas and work on exciting projects together.
Vor zwei Jahren wurde das Open-Source-Robotikprojekt pib ins Leben gerufen. Das Ziel von pib, dem printable intelligent bot zum Selberbauen, ist es, die Hürden zu senken und Robotik und Künstliche Intelligenz für alle Interessierten zugänglich zu machen. In den letzten zwei Jahren hat pib eine aktive und engagierte Community aufgebaut, die das Projekt unterstützt und vorantreibt. Seit dem Start des Projekts ist also viel passiert – Zeit, um zurückzublicken, wie weit pib gekommen ist.
Meilensteine, Herausforderungen und was als Nächstes kommt
Es kommt nicht jeden Tag vor, dass ein Roboter zwei Jahre alt wird, also feierte das Team mit einer großen Party. Zum Auftakt der Veranstaltung wurde die brandneue pib-Dokumentation gestreamt, gefolgt von verschiedenen Stationen, an denen die Gäste die neuesten Funktionen von pib selbst ausprobieren konnten.
pib begann als eine Idee, die in Form einer Masterarbeit und eines Roboterarms langsam Gestalt annahm. Daraus entstand ein humanoider Roboter, der mit den kostenlosen 3D-Druckdateien auf der Website einfach in 3D gedruckt und dann mit Hilfe der online verfügbaren Bauanleitungen gebaut werden kann. pib bietet viele Möglichkeiten zur Implementierung von KI-Trainings wie Sprachassistenten, Objekterkennung, Imitation und mehr.
Zunächst einmal haben das pib-Team und die Community gemeinsam die Beweglichkeit von pib optimiert. Das Ergebnis kann sich sehen lassen: In der neuesten Version kann pib seine Arme nun in praktisch allen Winkeln bewegen. Ein weiteres sich rasant entwickelndes Thema ist der digitale Zwilling von pib, der von den verantwortlichen Community-Mitgliedern ein Geburtstagsgeschenk erhalten hat: Die Kamera arbeitet nun in der virtuellen Umgebung, so dass das Kamerabild in die Außenwelt übertragen werden kann, um dort analysiert zu werden und dann zur Grundlage von Steuerungsprozessen zu werden.
Sprich mit mir, pib!
Darüber hinaus gab es einige bedeutende Fortschritte im Bereich der Mensch-Maschine-Interaktion, insbesondere bei der sprachbasierten Kommunikation mit pib durch fortschrittliche Sprachassistententechnologie. Das Team sieht großes Potenzial in der natürlichen Sprachinteraktion und arbeitet daran, die Fähigkeiten von pib in dieser Hinsicht noch weiter zu optimieren.
Eine der neuesten Funktionen, die auf der pib-Party vorgestellt wurden, ist die Kommunikation in einer multimodalen Welt. Der Roboter nimmt ein Bild auf, analysiert es und beantwortet dann Fragen im Zusammenhang mit dem Bild. Wenn man pib zum Beispiel fragt: „Wo sind wir gerade?“, interpretiert er den Raum und seine Umgebung und antwortet etwa: „Wir sind in einem Büro“.
Mit dieser neuen Funktion konnte pib auch seine erste Runde Tic Tac Toe spielen. Das Team zeichnete das Spielbrett auf ein Whiteboard, so dass pib in der Lage war, den aktuellen Stand des Spiels zu analysieren und den nächsten Zug mit Befehlen wie „platziere das nächste X in der oberen rechten Ecke“ zu bestimmen.
Join The Community
Die pib-Community wächst schnell und besteht aus 3D-Druck-, Robotik- und KI-Enthusiasten. Ob Anfänger oder Experte – jeder ist eingeladen, mitzumachen, seine Ideen zu teilen und gemeinsam an spannenden Projekten zu arbeiten.
This article primarily introduces the practical application of LIMO Cobot by Elephant Robotics in a simulated scenario. You may have seen previous posts about LIMO Cobot’s technical cases, A[LINK], B[LINK]. The reason for writing another related article is that the original testing environment, while demonstrating basic functionality, often appears overly idealized and simplified when simulating real-world applications. Therefore, we aim to use it in a more operationally consistent environment and share some of the issues that arose at that time.
2. Comparing the Old and New Scenarios:
First, let’s look at what the old and new scenarios are like.
Old Scenario: A simple setup with a few obstacles, relatively regular objects, and a field enclosed by barriers, approximately 1.5m*2m in size.
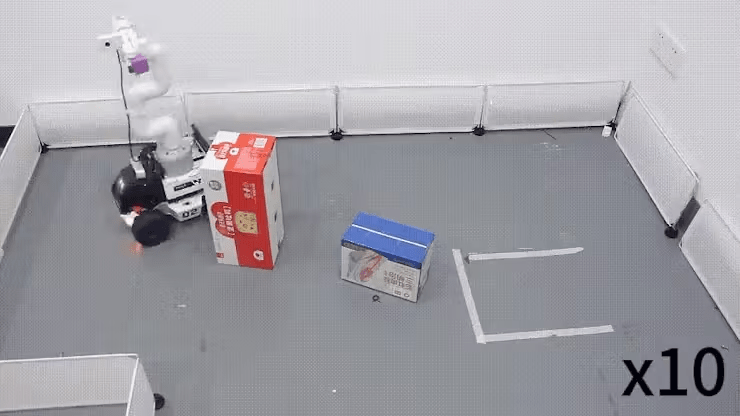
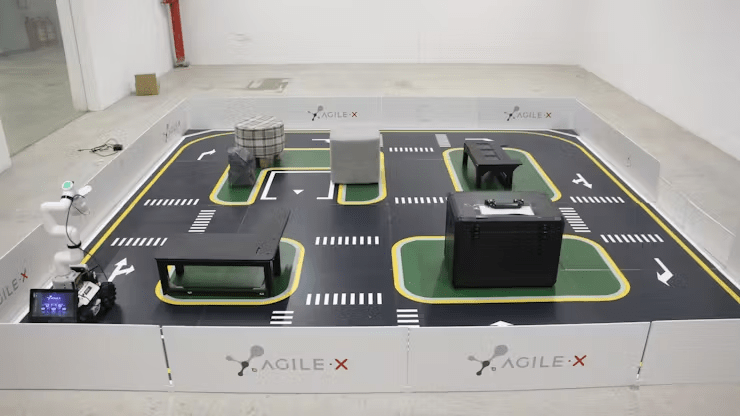
New Scenario: The new scenario contains a wider variety of obstacles of different shapes, including a hollowed-out object in the middle, simulating a real environment with road guidance markers, parking spaces, and more. The size of the field is 3m*3m.
The change in environment is significant for testing and demonstrating the comprehensiveness and applicability of our product.
3. Analysis of Practical Cases:
Next, let’s briefly introduce the overall process.
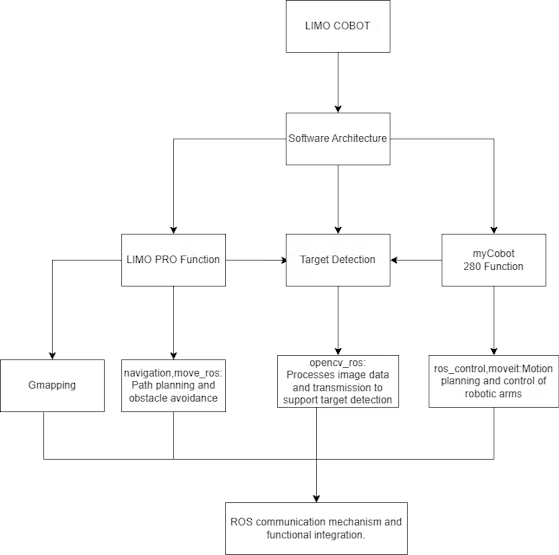
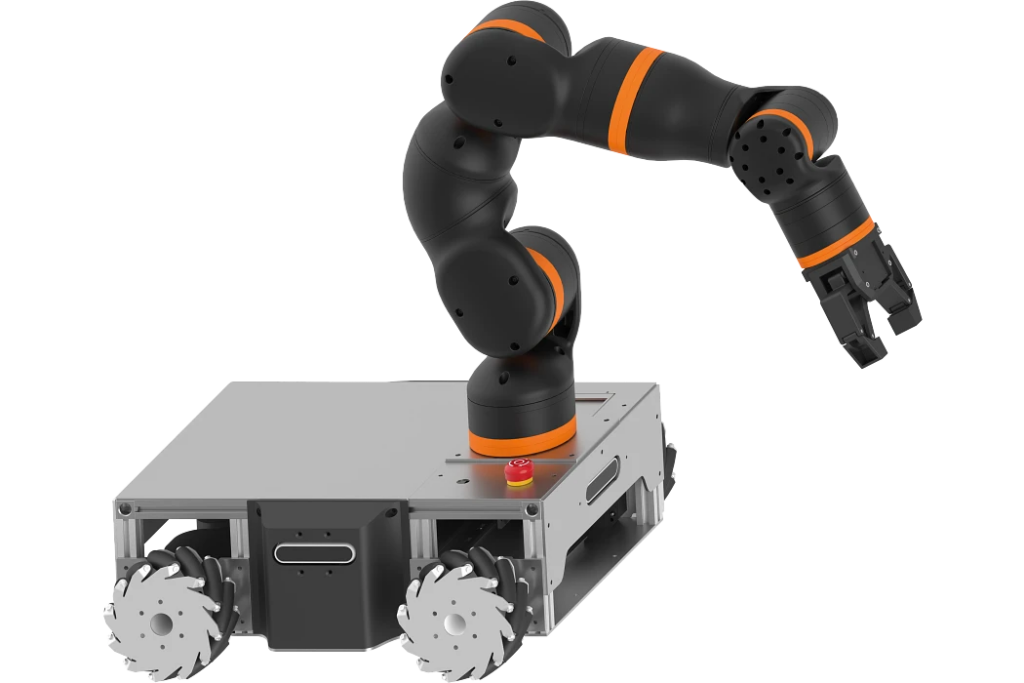
The process is mainly divided into three modules: one is the functionality of LIMO PRO, the second is machine vision processing, and the third is the functionality of the robotic arm. (For a more detailed introduction, please see the previous article [link].)
LIMO PRO is mainly responsible for SLAM mapping, using the gmapping algorithm to map the terrain, navigate, and ultimately achieve the function of fixed-point patrol.
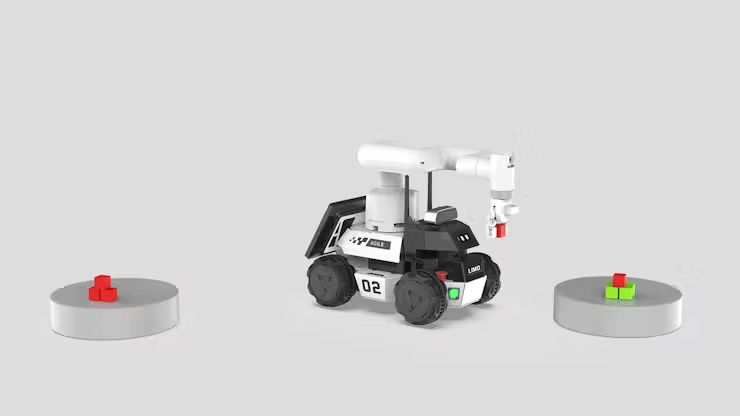
myCobot 280 M5 is primarily responsible for the task of grasping objects. A camera and a suction pump actuator are installed at the end of the robotic arm. The camera captures the real scene, and the image is processed by the OpenCV algorithm to find the coordinates of the target object and perform the grasping operation.
Then, start the gmapping mapping algorithm by opening another new terminal and entering the command:
roslaunch limo_bringup limo_gmapping.launch
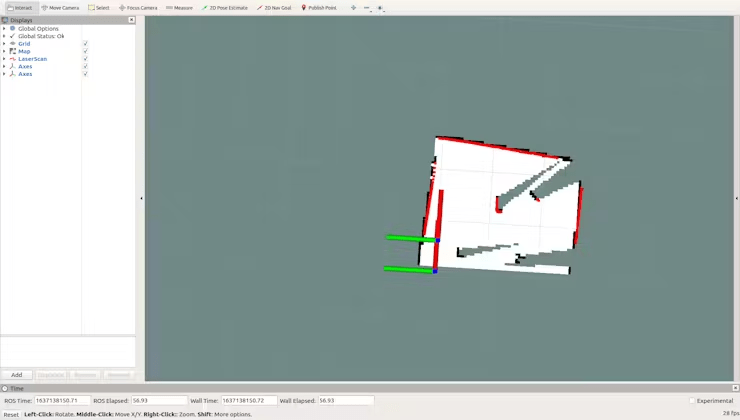
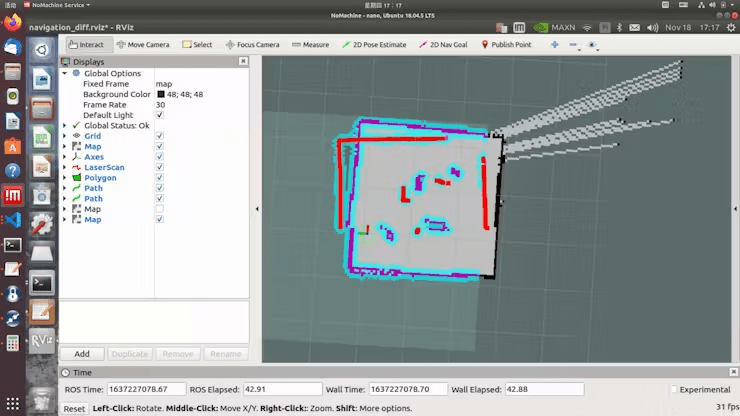
After successful startup, the rviz visualization tool will open, and you will see the interface as shown in the figure.
At this point, you can switch the controller to remote control mode to control the LIMO for mapping.
After constructing the map, you need to run the following commands to save the map to a specified directory:
1. Switch to the directory where you want to save the map. Here, save the map to `~/agilex_ws/src/limo_ros/limo_bringup/maps/`. Enter the command in the terminal:
cd ~/agilex_ws/src/limo_ros/limo_bringup/maps/
2. After switching to `/agilex_ws/limo_bringup/maps`, continue to enter the command in the terminal:
rosrun map_server map_saver -f map1
This process went very smoothly. Let’s continue by testing the navigation function from point A to point B.
Navigation:
1. First, start the radar by entering the following command in the terminal:
Upon success, this interface will open, displaying the map we just created.
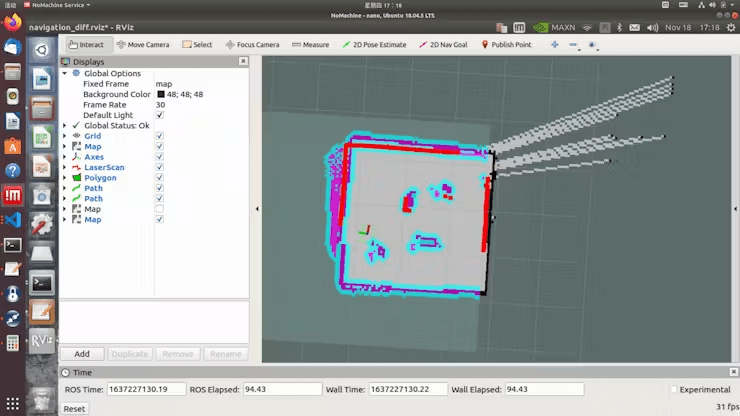
Click on „2D Pose Estimate, “ then click on the location where LIMO is on the map. After starting navigation, you will find that the shape scanned by the laser does not overlap with the map. You need to manually correct this by adjusting the actual position of the chassis in the scene on the map displayed in rviz. Use the tools in rviz to publish an approximate position for LIMO. Then, use the controller to rotate LIMO, allowing it to auto-correct. When the shape of the laser scan overlaps with the shapes in the map’s scene, the correction is complete, as shown in the figure where the scanned shape and the map overlap.
Click on „2D Nav Goal“ and select the destination on the map for navigation.
The navigation test also proceeds smoothly.
Next, we will move on to the part about the static robotic arm’s grasping function.
Identifying and Acquiring the Pose of Aruco Codes
To precisely identify objects and obtain the position of the target object, we processed Aruco codes. Before starting, ensure the specific parameters of the camera are set.
Initialize the camera parameters based on the camera being used.
Then, identify the object and estimate its pose to obtain the 3D position of the object and output the position information.
def estimatePoseSingleMarkers(self, corners): """ This will estimate the rvec and tvec for each of the marker corners detected by: corners, ids, rejectedImgPoints = detector.detectMarkers(image) corners - is an array of detected corners for each detected marker in the image marker_size - is the size of the detected markers mtx - is the camera matrix distortion - is the camera distortion matrix RETURN list of rvecs, tvecs, and trash (so that it corresponds to the old estimatePoseSingleMarkers()) """ marker_points = np.array([[-self.marker_size / 2, self.marker_size / 2, 0], [self.marker_size / 2, self.marker_size / 2, 0], [self.marker_size / 2, -self.marker_size / 2, 0], [-self.marker_size / 2, -self.marker_size / 2, 0]], dtype=np.float32) rvecs = [] tvecs = [] for corner in corners: retval, rvec, tvec = cv2.solvePnP(marker_points, corner, self.mtx, self.dist, False, cv2.SOLVEPNP_IPPE_SQUARE) if retval: rvecs.append(rvec) tvecs.append(tvec)
The steps above complete the identification and acquisition of the object’s information, and finally, the object’s coordinates are returned to the robotic arm to execute the grasping.
Robotic Arm Movement and Grasping Operation
Based on the position of the Aruco marker, calculate the target coordinates the robotic arm needs to move to and convert the position into a coordinate system suitable for the robotic arm.
def homo_transform_matrix(x, y, z, rx, ry, rz, order="ZYX"): rot_mat = rotation_matrix(rx, ry, rz, order=order) trans_vec = np.array([[x, y, z, 1]]).T mat = np.vstack([rot_mat, np.zeros((1, 3))]) mat = np.hstack([mat, trans_vec]) return mat
If the Z-axis position is detected as too high, it will be corrected:
if end_effector_z_height is not None: p_base[2] = end_effector_z_height
After the coordinate correction is completed, the robotic arm will move to the target position.
# Concatenate x, y, z, and the current posture into a new array new_coords = np.concatenate([p_base, curr_rotation[3:]]) xy_coords = new_coords.copy()
Then, control the end effector’s API to suction the object.
The above completes the respective functions of the two robots. Next, they will be integrated into the ROS environment.
#Initialize the coordinates of point A and B
goal_1 = [(2.060220241546631,-2.2297520637512207,0.009794792000444471,0.9999520298742676)] #B
goal_2 = [(1.1215190887451172,-0.002757132053375244,-0.7129997613218174,0.7011642748707548)] #A
#Start navigation and link the robotic arm
map_navigation = MapNavigation()
arm = VisualGrasping("10.42.0.203",9000)
print("connect successful")
arm.perform_visual_grasp(1,-89)
# Navigate to location A and perform the task
for goal in goal_1:
x_goal, y_goal, orientation_z, orientation_w = goal
flag_feed_goalReached = map_navigation.moveToGoal(x_goal, y_goal, orientation_z, orientation_w)
if flag_feed_goalReached:
time.sleep(1)
# executing 1 grab and setting the end effector's Z-axis height to -93.
arm.unload()
print("command completed")
else:
print("failed")
4. Problems Encountered
Mapping Situation:
When we initially tried mapping without enclosing the field, frequent errors occurred during navigation and localization, and it failed to meet our requirements for a simulated scenario.
Navigation Situation:
In the new scenario, one of the obstacles has a hollow structure.
During navigation from point A to point B, LIMO may fail to detect this obstacle and assume it can pass through, damaging the original obstacle. This issue arises because LIMO’s radar is positioned low, scanning only the empty space. Possible solutions include adjusting the radar’s scanning range, which requires extensive testing for fine-tuning, or adjusting the radar’s height to ensure the obstacle is recognized as impassable.
Robotic Arm Grasping Situation:
In the video, it’s evident that our target object is placed on a flat surface. The grasping did not consider obstacle avoidance for the object. In the future, when setting special positions for grasping, this situation needs to be considered.
5. Conclusion
Overall, LIMO Cobot performed excellently in this scenario, successfully meeting the requirements. The entire simulated scenario covered multiple core areas of robotics, including motion control of the robotic arm, path planning, machine vision recognition and grasping, and radar mapping navigation and fixed-point cruising functions of the mobile chassis. By integrating these functional modules in ROS, we built an efficient automated process, showcasing LIMO Cobot’s broad adaptability and advanced capabilities in complex environments.
Reduzierung des Energieverbrauchs um bis zu 30 Prozent möglich
Neueste Roboter eigenen sich ideal für Branchen wie Automobilindustrie, Allgemeinindustrie und Logistik
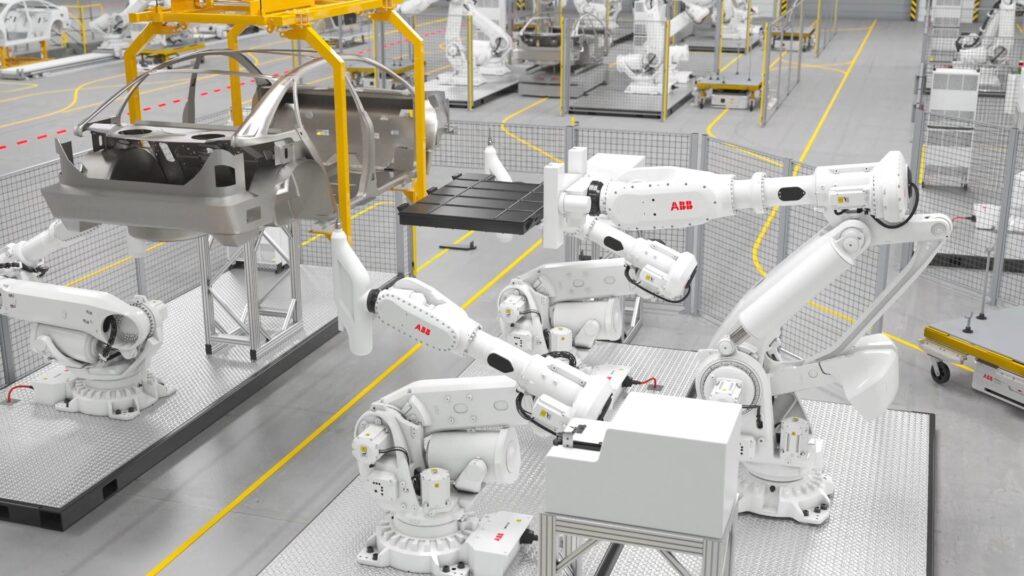
Mit der Einführung der neuen Modelle IRB 7710 und IRB 7720 setzt ABB Robotics den Ausbau ihres Portfolios an modularen Großrobotern fort. Zusammen mit den kürzlich vorgestellten Modellen IRB 5710-IRB 5720 und IRB 6710-IRB 6740 umfasst das Angebot nun insgesamt 46 Varianten mit Traglasten zwischen 70 kg und 620 kg und bietet Kunden ein Höchstmaß an Flexibilität, Auswahl und Leistung.
„Unternehmen setzen zunehmend auf neue Technologien und Komponenten, um ihre Produktivitäts- und Nachhaltigkeitsziele zu erreichen. Daher haben wir unser Angebot an modularen Großrobotern so konzipiert, dass Kunden die am besten geeigneten Roboter und Varianten für einen effizienten Betrieb auswählen können“, erklärt Marc Segura, Leiter der Robotics-Division bei ABB. „Wir verfügen über das umfassendste Portfolio an Mechatronik-Plattformen: Industrierobotern, Cobots und AMR auf dem Markt. Die neuen Roboter erweitern dieses Angebot und helfen unseren Kunden dabei, dem Arbeitskräftemangel entgegenzuwirken, ihre Wettbewerbsfähigkeit zu sichern und gleichzeitig nachhaltig zu sein.“
Die neuen ABB-Roboter IRB 7710 und IRB 7720 sind in 16 Varianten erhältlich und unterstützen Anwendungen in unterschiedlichen Branchen. So können Hersteller von Elektro-, Hybrid- und Verbrennerfahrzeugen aus einer breiten Palette von ABB-Robotern die ideale Variante für verschiedene Anwendungen wählen – angefangen von der Pressenautomatisierung über die Karosseriefertigung und Batterieproduktion bis hin zur Endmontage. Die Roboter eignen sich perfekt für Montageaufgaben mit hohen Traglasten wie Giga-Casting, Hochgeschwindigkeits-Pressenbeschickung und -Palettierung sowie für hochpräzise Kontaktanwendungen wie maschinelles Bearbeiten und Rührreibschweißen.
Die ABB OmniCore™-Steuerung sorgt für eine erstklassige Bewegungssteuerung der Roboter mit einer Bahngenauigkeit von 0,6 mm. Das gilt auch, wenn mehrere Roboter mit Geschwindigkeiten von bis zu 1.600 mm/s Lasten von bis zu 620 kg bewegen. Kunden profitieren zudem von einer Reduzierung der Zykluszeiten um bis zu 25 Prozent bei einer gleichzeitigen Verbesserung der Produktivität und Qualität. In der Automobilindustrie ermöglicht der IRB 7710 mit der neuesten OmniCore-Steuerung eine Steigerung der Produktionsleistung von robotergestützten Pressenlinien von 12 auf 15 Hübe pro Minute zur Fertigung von 900 Teilen pro Stunde. Im Bausektor können die neuen Roboter das Wachstum im Bereich des modularen Bauens unterstützen, indem sie zum Beispiel zur Fertigung von Stahlrahmen und zur Oberflächenbearbeitung eingesetzt werden und so zur Steigerung der Geschwindigkeit und Qualität beitragen.
Das energieeffiziente Design des IRB 7710 in Kombination mit der regenerativen Technologie der OmniCore-Steuerung senkt den Energiebedarf um bis zu 30 Prozent, während das integrierte Power Pack eine Energierückspeisung ins Netz ermöglicht.
Entdecken Sie die Roboter der myArm M&C-Serie für vielseitige, leistungsstarke Lösungen in der Robotik, die eine präzise Steuerung und vielfältige Anwendungen bieten.
SHENZHEN, GUANGDONG, CHINA, 10. Mai 2024 /EINPresswire.com/ — Die Forschung zur verkörperten Intelligenz als kritischer Zweig der künstlichen Intelligenz ist bestrebt, Roboter mit neuen Fähigkeiten für präzise Bewegungssteuerung, autonome Entscheidungsfindung auf hohem Niveau und nahtlose Mensch-Maschine-Interaktion auszustatten.
Vor diesem Hintergrund hat Elephant Robotics kürzlich die Roboter der M&C-Serie myArm vorgestellt. Diese leistungsstarken und kostengünstigen Leichtbauroboter unterstützen Forscher und Entwickler sowohl bei der Datenerfassung als auch bei der Ausführung und treiben die Fortschritte in der Technologie der verkörperten Intelligenz und ihrer praktischen Anwendungen voran.
Die Roboter der myArm M&C-Serie wurden sorgfältig entwickelt, um die unterschiedlichen Bedürfnisse der Benutzer zu erfüllen, wobei Flexibilität und Anpassungsfähigkeit im Vordergrund stehen. Sie spielen eine zentrale Rolle in verschiedenen Forschungs- und Anwendungsszenarien und sind damit die ideale Robotiklösung für Bildungs- und Forschungszwecke.
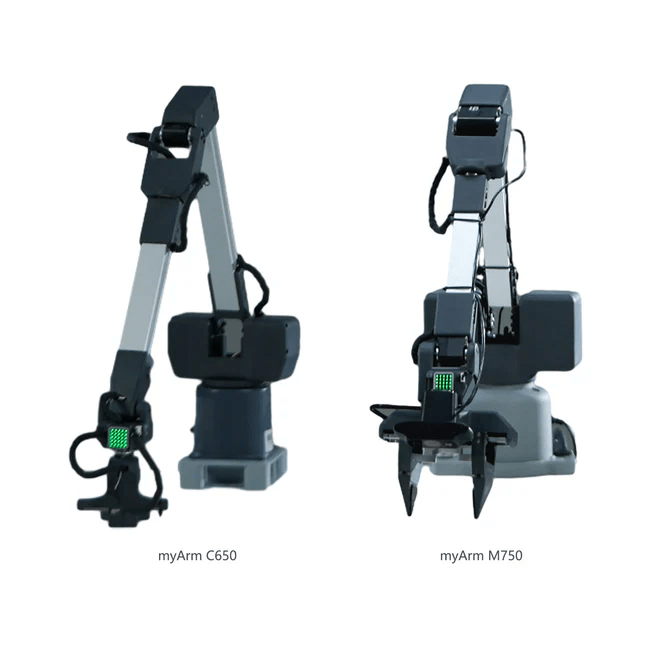
myArm C650
The myArm C650 ist ein universelles 6-DOF-Gerät zur Erfassung von Roboterbewegungsinformationen, das entwickelt wurde, um die vielfältigen Anforderungen von Bildung, Forschung und Industrie bei der Erfassung und Analyse von Roboterbewegungsdaten zu erfüllen. Mit seinem leichten Design von nur 1,8 kg verfügt der myArm C650 über einen horizontalen Arbeitsradius von 650 mm, wodurch die Trägheitskräfte während des Betriebs minimiert werden, um die Reaktionsgeschwindigkeit und Präzision zu verbessern.
Ausgestattet mit hochpräzisen digitalen Servomotoren und 4096-Bit-Encodern an allen 6 Gelenken ahmt der myArm C650 die Bewegung des menschlichen Arms mit bemerkenswerter Genauigkeit nach und ermöglicht so eine Vielzahl von Aufgaben. Seine intuitive Steuerungsmethode mit Doppelfinger-Fernbedienung und zwei anpassbaren Tasten unterstützt Aufzeichnungsfunktionen für eine präzise Befehlsausführung und sofortiges Feedback zum Roboterverhalten. Diese Flexibilität macht den myArm C650 zur idealen Wahl für die präzise Bewegungsverfolgung und Datenerfassung in verschiedenen experimentellen und pädagogischen Umgebungen. Mit einer beeindruckenden Informationserfassungsgeschwindigkeit von bis zu 50 Hz ist es für die Entwicklung von Roboteralgorithmen und Hochschuleinrichtungen unverzichtbar geworden und bietet Echtzeit-Datenunterstützung für komplexe Steuerungssysteme.
Bei Fernsteuerungsanwendungen zeichnet sich der myArm C650 durch eine hervorragende Leistung aus, unabhängig von der Komplexität der Konfiguration des Roboters. Darüber hinaus erweitert die Kompatibilität mit Python und ROS in Verbindung mit Open-Source-Demonstrationsdateien für die Fernsteuerung den Anwendungsbereich und ermöglicht eine nahtlose Integration mit fortschrittlichen Roboterplattformen wie dem myArm M750, myCobot Pro 630 und Mercury B1.
Der myArm C650 setzt einen neuen Standard für Vielseitigkeit und Leistung bei der Erfassung von Roboterbewegungsdaten und ermöglicht es Benutzern, das volle Potenzial fortschrittlicher Robotik in verschiedenen Bereichen auszuschöpfen.
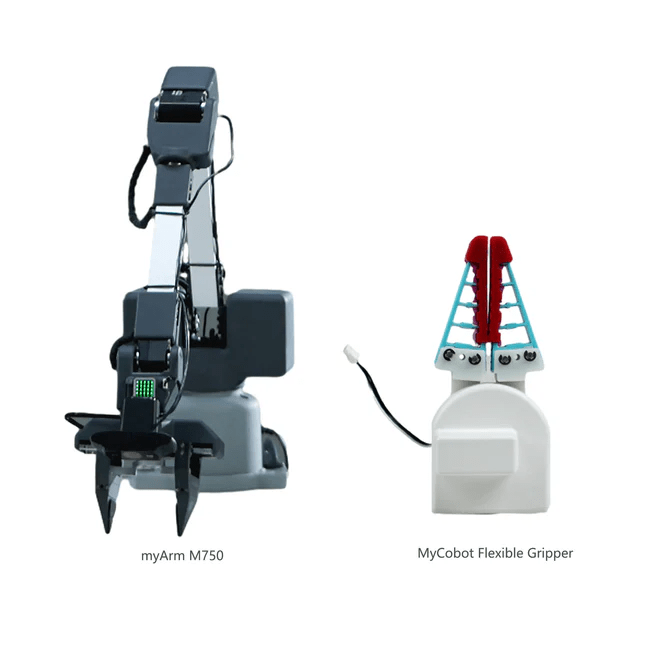
myArm M750
Der myArm M750 ist ein universeller, intelligenter 6-DOF-Roboterarm. Es erfüllt nicht nur die Nachfrage nach hochpräziser Roboterbewegungssteuerung, sondern eignet sich besonders für die Verifizierung von Roboterbewegungsalgorithmen auf Einstiegsniveau und praktische Lehrszenarien. Seine standardisierte mechanische Armstruktur bietet Studenten und Anfängern eine ideale Lernplattform, um die Grundprinzipien und Anwendungen der Roboterkinematik zu verstehen.
Der myArm M750 wurde für eine präzise Bewegungssteuerung und -verifizierung entwickelt und eignet sich hervorragend für Anwendungen, die eine strenge Betriebsgenauigkeit erfordern, wie z. B. Präzisionsmontage, Feinmanipulation und Qualitätsüberwachung. Ausgestattet mit hochpräzisen digitalen Servomotoren in Industriequalität und fortschrittlichen Steuerungsalgorithmen bietet der myArm M750 eine außergewöhnliche Drehmomentsteuerung und Positionsgenauigkeit und unterstützt eine Nenntragfähigkeit von 500 g und eine Spitzenlast von bis zu 1 kg.
Die Vielseitigkeit des myArm M750 erstreckt sich auch auf das Endeffektor-Design, das mit einem standardmäßigen Parallelgreifer und einem Vision-Modul ausgestattet ist, das dem Benutzer grundlegende Greif- und Erkennungsfunktionen bietet. Darüber hinaus bietet der myArm M750 Kompatibilität mit einer Reihe von optionalem Zubehör, was seine Anwendungsszenarien und Anpassungsfähigkeit an verschiedene Aufgaben erheblich erweitert.
myArm M&C Teleoperation Roboterarm-Kit
DasTeleoperation Robotic Arm Kit stellt einen Sprung nach vorne in der Robotik-Innovation dar und bietet eine fortschrittliche Lösung, die auf die Fernsteuerung und Echtzeit-Interaktion durch modernste Teleoperationstechnologie zugeschnitten ist. Durch die nahtlose Integration der Vielseitigkeit des myArm C650 mit den präzisen Steuerungsfunktionen des myArm M750 bildet dieses Kit eine dynamische und anpassungsfähige Plattform, die für eine Vielzahl von Forschungs-, Bildungs- und kommerziellen Anwendungen geeignet ist.
Das Kit wurde entwickelt, um menschliches Verhalten nachzuahmen, und ermöglicht es Forschern und Entwicklern, Fernsteuerungssysteme und Roboterbewegungsplanungsmodelle ähnlich dem ALOHA-Roboter zu validieren und zu testen. Das myArm M&C Kit verfügt über Datenerfassungs- und Steuerungsfunktionen auf Millisekundenebene, Echtzeit-Widerstandssteuerungsfunktionen und kollaborative Betriebsfunktionen mit mehreren Robotern und erleichtert die Ausführung komplexer Aufgaben, einschließlich fortschrittlicher Simulationen menschlichen Verhaltens. Diese Technologie zeigt nicht nur die Präzision und Effizienz von Robotern bei der Nachahmung menschlicher Handlungen, sondern treibt auch die Forschung und Entwicklung in der Robotertechnologie zur Simulation menschlichen Verhaltens und zur Ausführung alltäglicher Aufgaben voran.
Darüber hinaus stattet die integrierte KI-Technologie Roboter mit Lern- und Anpassungsfähigkeit aus, ermöglicht autonome Navigation, Objekterkennung und komplexe Entscheidungsfähigkeiten und erschließt so ein enormes Anwendungspotenzial in verschiedenen Forschungsbereichen.
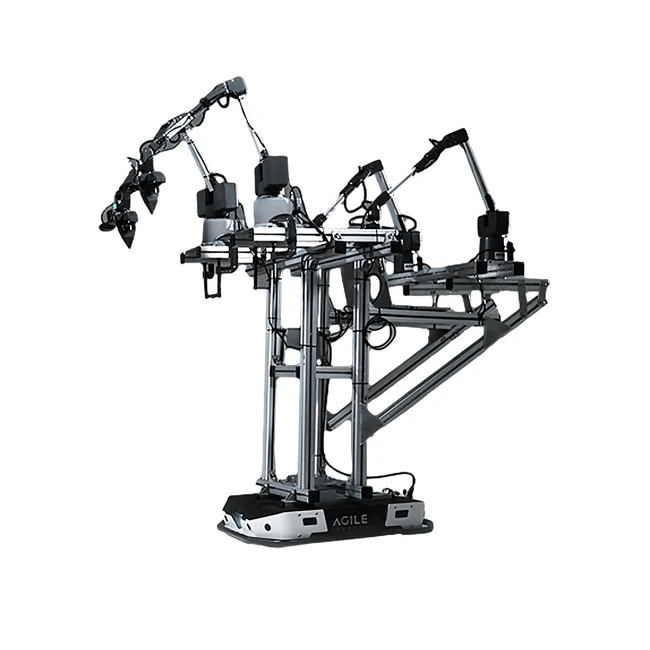
myArm M&C Embodied humanoid Robot Compound Kit
Das Mobile ALOHA-Projekt der Stanford University hat aufgrund seiner bahnbrechenden Fortschritte in der Robotiktechnologie weltweite Aufmerksamkeit erregt. Es hat ein fortschrittliches System entwickelt, das es Benutzern ermöglicht, komplexe zweiarmige Aufgaben durch menschliche Demonstrationen auszuführen und so die Effizienz von nachgeahmten Lernalgorithmen durch Datenakkumulation und kollaboratives Training zu verbessern. Das Mobile ALOHA-System zeigt seine Vielseitigkeit, indem es verschiedene reale Aufgaben nahtlos ausführt, vom Reinigen verschütteter Getränke über das Kochen von Garnelen bis hin zum Waschen von Bratpfannen. Diese Innovation markiert nicht nur einen bedeutenden Meilenstein in der Robotik, sondern ebnet auch den Weg für eine Zukunft, in der Mensch und Roboter harmonisch koexistieren.
Dieses Kit wurde von Stanfords Mobile ALOHA-Projekt inspiriert und verwendet das gleiche mobile Tracer-Fahrgestell. Mit einer Open-Source-Philosophie, minimalistischem Design, modularem Aufbau und robuster lokaler Community-Unterstützung dient dieses Kit als kostengünstige Lösung für die Echtzeit-Roboterteleoperation und -steuerung und spiegelt die Fähigkeiten von Mobile ALOHA zu einem erschwinglicheren Preis wider.
Dieses Kit wurde entwickelt, um den Bedürfnissen kleiner und mittlerer Unternehmen sowie Bildungs- und Forschungseinrichtungen gerecht zu werden, und bietet einen erschwinglicheren Preis, benutzerfreundliche Funktionen und einen einfachen Zugang zu modernster Robotertechnologie.
Die Roboter der myArm M&C-Serie sind eine vielseitige Robotiklösung, die unterschiedliche Anforderungen erfüllt, von der Grundlagenforschung bis hin zur Ausführung komplizierter Aufgaben. In Kombination mit optionalen Kits passen sie sich nahtlos an verschiedene Anwendungsszenarien an, von der Präzisionsfertigung über medizinische Hilfe bis hin zu Bildung, Schulung und Haushaltsunterstützung. Die Roboter der myArm M&C-Serie zeichnen sich durch zuverlässige und leistungsstarke Lösungen aus, die Zuverlässigkeit und Exzellenz versprechen. Die Aufnahme des Embodied Humanoid Robot Compound Kit und des Quadruped Bionic Robot Compound Kit erweitert die Möglichkeiten in der Robotik weiter, fördert die interdisziplinäre Erforschung und fördert Innovationen.
Explore myArm M&C series robots for versatile, high-performing solutions in robotics, offering precise control and diverse applications.
SHENZHEN, GUANGDONG, CHINA, May 10, 2024 /EINPresswire.com/ — Embodied intelligence research, as a critical branch of artificial intelligence, is striving to endow robots with new capabilities in precise motion control, high-level autonomous decision-making, and seamless human-machine interaction.
Against this backdrop, Elephant Robotics has recently unveiled the myArm M&C series robots. These powerful and cost-effective lightweight robots empower researchers and developers in both data collection and execution, driving forward the advancements in embodied intelligence technology and its practical applications..
The myArm M&C series robots are meticulously designed to meet the diverse needs of users, prioritizing flexibility and adaptability. They play a pivotal role in various research and application scenarios, making them the ideal robotics solution for education and research purposes.
myArm C650
The myArm C650 is a universal 6 DOF robot motion information collection device designed to meet the diverse needs of education, research, and industry in robot motion data collection and analysis. With its lightweight design of weighing only 1.8kg, the myArm C650 boasts a horizontal working radius of 650mm, minimizing inertial forces during operation for enhanced response speed and precision.
Equipped with high-precision digital servo motors and 4096-bit encoders on all 6 joints, the myArm C650 mimics human arm motion with remarkable accuracy, enabling a wide range of tasks. Its intuitive control method, featuring dual-finger remote control and dual customizable buttons, supports recording functions for precise command execution and immediate feedback on robot behavior. This flexibility makes the myArm C650 an ideal choice for precise motion tracking and data collection in various experimental and educational settings. With an impressive information acquisition speed of up to 50Hz, it has become indispensable for robot algorithm development and higher education institutions, offering real-time data support for complex control systems.
In remote control applications, the myArm C650 excels, delivering outstanding performance regardless of the robot’s configuration complexity. Moreover, its compatibility with Python and ROS, coupled with open-source remote control demonstration files, expands its application scope, enabling seamless integration with advanced robot platforms like the myArm M750, myCobot Pro 630, and Mercury B1.
The myArm C650 sets a new standard for versatility and performance in robot motion data collection, empowering users to explore the full potential of advanced robotics across diverse fields.
myArm M750
The myArm M750 is a universal intelligent 6 DOF robotic arm. It not only meets the demand for high-precision robot motion control but is particularly suitable for entry-level robot motion algorithm verification and practical teaching scenarios. Its standardized mechanical arm structure provides an ideal learning platform for students and beginners to grasp the basic principles and applications of robot kinematics.
Dedicated to achieving precise motion control and verification, the myArm M750 excels in applications requiring strict operational accuracy, such as precision assembly, fine manipulation, and quality monitoring. Equipped with industrial-grade high-precision digital servo motors and advanced control algorithms, the myArm M750 delivers exceptional torque control and positional accuracy, supporting a rated load capacity of 500g and a peak load of up to 1kg.
The myArm M750’s versatility extends to its end effector design, featuring a standard parallel gripper and vision module that empower users with basic grasping and recognition capabilities. Furthermore, the myArm M750 offers compatibility with a range of optional accessories, significantly expanding its application scenarios and adaptability to diverse tasks.
myArm M&C Teleoperation Robotic Arm Kit
Teleoperation Robotic Arm Kit represents a leap forward in robotics innovation, offering an advanced solution tailored for remote control and real-time interaction through cutting-edge teleoperation technology. By seamlessly integrating the versatility of the myArm C650 with the precise control capabilities of the myArm M750, this kit forms a dynamic and adaptable platform suitable for a myriad of research, educational, and commercial applications.
Engineered to mimic human behavior, the kit enables researchers and developers to validate and test remote control systems and robot motion planning models akin to the ALOHA robot. Empowered by millisecond-level data acquisition and control capability, real-time drag control functionality, and multi-robot collaborative operation capabilities, the myArm M&C Kit facilitates the execution of complex tasks, including advanced simulations of human behavior. This technology not only showcases the precision and efficiency of robots in mimicking human actions but also propels research and development in robot technology for simulating human behavior and performing everyday tasks.
Moreover, integrated AI technology equips robots with learning and adaptability, enabling autonomous navigation, object recognition, and complex decision-making capabilities, thereby unlocking vast application potential across diverse research fields.
myArm M&C Embodied Humanoid Robot Compound Kit
Stanford University’s Mobile ALOHA project has garnered global attention for its groundbreaking advancements in robotics technology. It has developed an advanced system that allows users to execute complex dual-arm tasks through human demonstrations, thereby enhancing imitation learning algorithms‘ efficiency through data accumulation and collaborative training. The Mobile ALOHA system showcases its versatility by seamlessly executing various real-world tasks, from cleaning spilled drinks to cooking shrimp and washing frying pans. This innovation not only marks a significant milestone in robotics but also paves the way for a future where humans and robots coexist harmoniously.
Drawing inspiration from Stanford’s Mobile ALOHA project, this kit adopts the same Tracer mobile chassis. With an open-source philosophy, minimalist design, modular construction, and robust local community support, this kit serves as a cost-effective solution for real-time robot teleoperation and control, mirroring the capabilities of Mobile ALOHA with a more accessible price.
Designed to cater to the needs of small and medium-sized enterprises, as well as educational and research institutions, this kit offers a more accessible price, user-friendly features, and easy accessibility to cutting-edge robot technology.
The myArm M&C series robots are a versatile robotics solution catering to diverse needs from fundamental research to intricate task execution. In combination with optional kits, they seamlessly adapt to various application scenarios, from precision manufacturing to medical assistance, education, training, and household support. The myArm M&C series robots stand out as dependable and high-performing solutions, promising reliability and excellence. The inclusion of the Embodied Humanoid Robot Compound Kit and Quadruped Bionic Robot Compound Kit further expands the possibilities in robotics, encouraging interdisciplinary exploration and fostering innovation.
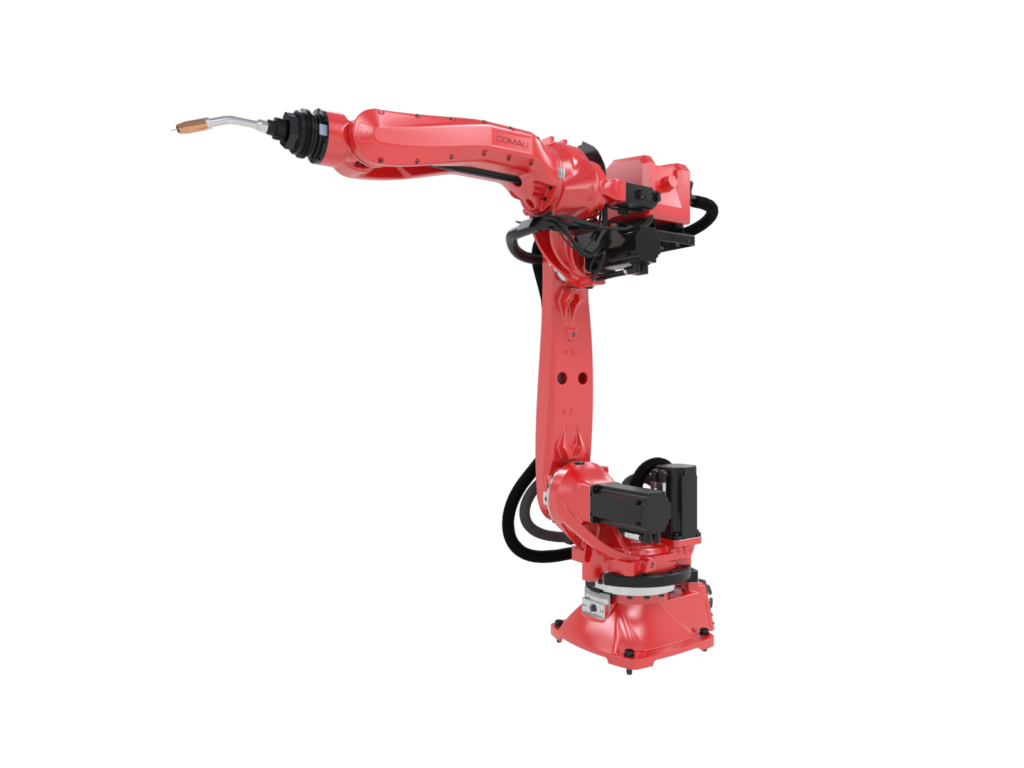
Die Roboter der S-Familie sind speziell für Lichtbogenschweißen, E-Mobilität, Lebensmittel und Getränke sowie Handhabungsanwendungen konzipiert, bei denen Genauigkeit, Wiederholbarkeit und Geschwindigkeit nicht verhandelbar sind
Sie kombinieren Flexibilität, Wiederholbarkeit und Genauigkeit mit kleinerer Stellfläche und mehreren Montagepositionen, um die Roboterdichte ohne Leistungseinbußen zu erhöhen
Mit einem witterungsbeständigen Hohlgelenkdesign und vollständig integrierter Lichtbogen- und Gigabit-Ausrüstung sorgen die kompakten roten Roboter für einen besseren Zugang zu engen Räumen
Das benutzerfreundliche, einfach zu installierende und energieeffiziente Design kombiniert bessere Leistung mit reduziertem Energieverbrauch und geringeren Kosten
Chicago (Illinois) – 6. Mai 2024 – Comau präsentiert seine neue S-Familie kleiner, aber leistungsstarker Roboter auf der Automate 2024, der führenden Messe für Automatisierung in Nordamerika. Die ersten beiden Hochgeschwindigkeitsroboter mit Nutzlasten von 13 kg bis zu 18 kg sind ausdrücklich für Montage-, Lichtbogenschweiß- und Handhabungsanwendungen vorgesehen, bei denen Genauigkeit, Wiederholbarkeit und Geschwindigkeit nicht verhandelbar sind. Sie zeichnen sich durch ihre anspruchsvolle Leistung und ihr historisches rotes Roboterdesign aus und spiegeln auch das Engagement von Comau wider, die Automatisierung für vielfältige und nicht-automobile Branchen zugänglicher zu machen. Die kompakten, robusten und vielseitigen Roboter können problemlos in kleine Räume und enge Bereiche gelangen, die mit anderen Robotern schwer zu erreichen sind. Und weil sie nach Fraunhofer Verfahrensanweisung zertifiziert hoch energieeffizient sind, hilft die S-Familie der 6-Achsen-Gelenkroboter Unternehmen dabei, eine höhere Produktionsqualität und bessere Leistung bei reduziertem Energieverbrauch und geringeren Kosten zu erreichen.
Die Roboter der S-Familie eignen sich perfekt für Anwendungen, die extreme Genauigkeit und Geschwindigkeit erfordern und gleichzeitig vollständigen Schutz vor Elementen wie Wasser, Staub und anderen Verunreinigungengewährleisten. Bei ihrem erstklassigen IP68-Hollow-Wrist-Design verläuft die elektrische und Hilfsverkabelung im Handgelenk, so dass die Roboter agiler sind und gleichzeitig das Risiko von Schäden minimieren können. Darüber hinaus sind sie die einzigen Roboter mit vollständig integrierter Lichtbogen- und Gigabit-Ausrüstung, die dazu beiträgt, Layout-Einschränkungen zu beseitigen, die Montage und Installation zu erleichtern, schnellere Reaktionszeiten zu gewährleisten und Kabelknicke und -brüche und nachfolgende Wartungskosten erheblich zu reduzieren. Neben der Automatisierung von Schweiß-, Handhabungs-, Gießerei-, Automobil- und Batterieherstellungsprozessen kann die S-Familie daher problemlos für Lebensmittel und Getränke sowie allgemeine Montageanwendungen eingesetzt werden. Schließlich können die Roboter am Boden, an der Wand oder an der Decke montiert werden. So kann der Platz ohne Abstriche bei der Leistung optimiert werden.
„Die neue S-Familie der kleinen Hochgeschwindigkeitsroboter von Comau kombiniert Effizienz und technische Exzellenz mit den Funktionen, die für einen effektiven Einsatz in neuen Märkten und speziellen Anwendungsbereichen erforderlich sind“, so Nicole Clement, Chief Business Unit Leader für Advanced Automation Solutions. „Unser Engagement, die Automatisierung einfacher zu installieren und zu nutzen, insbesondere in Nicht-Automobilmärkten, in denen die Automatisierung schnell wächst, ist ein weiterer Weg, wie Comau die Kraft der Automatisierung in einen zunehmend vielfältigen Sektor von Branchen und Anwendungen bringt.“
Die Roboter der S-Familie wurden nach Fraunhofer-Verfahren auf Energieeffizienz geprüft und zertifiziert und sind in zwei verschiedenen Nutzlastkonfigurationen (13 und 18 kg) mit einer Reichweite von 1700 mm und einer Wiederholbarkeit von ±0,03 mm erhältlich.
Wie Sie Kosten senken und die Vorteile der Automationsklassiker Pick & Place, Prüfen und Dosieren am besten für sich nutzen
Autor: Alexander Mühlens, Geschäftsbereichsleiter Low Cost Automation bei der igus GmbH
Aus der Industrie sind Roboter schon lange nicht mehr wegzudenken – ob als Maschinenbestücker, Qualitätsprüfer oder Montagehelfer. Doch viele kleinere und mittelständischen Unternehmen (KMU) drohen ins Hintertreffen zu geraten. Denn oft wissen Sie garnicht, wo sie anfangen sollen. Welche Anwendungen lassen sich überhaupt automatisieren? Und häufig scheinen die Investitionskosten zu hoch und die Integration und Bedienung zu komplex.
Abbildung 1: Ob dosieren, picken oder prüfen – es Bedarf etwas Vorstellungskraft und preiswerte Robotik-Komponenten, um mit Automatisierungsprojekten zu starten. (Quelle: igus GmbH)
Picken, dosieren, schleifen oder prüfen: Es gibt eine Vielzahl an monotonen, repetitiven und anstrengenden Arbeiten, die sich einfach automatisieren lassen. Doch sich nur einen Roboter anzuschaffen, führt am Ende leider zu keiner Lösung. Am Ende muss das gesamte System aus Roboter und Komponenten wie Vision-Systeme, Greifer und Sensoren funktionieren. Doch insbesondere KMU wissen häufig nicht, wo sie nach einer Lösung suchen sollen und wie die passende Lösung überhaupt aussieht. Außerdem ist es wichtig, nicht zu komplex anzufangen. Der herstellerneutraler Robotik-Marktplatz RBTX hilft Automatisierungswilligen dabei, die einfachste und kostengünstigste, funktionierende Lösung zu finden.
Über 400 Komplettlösungen aus der Praxis
Das Besondere: Interessierte finden auf dem Marktplatz nicht nur Roboter und Einzelkomponenten, sondern Einblick wie es andere machen. Als Inspirationsquelle zum sofortigen Nachmachen finden sich online über 400 sofort adaptierbare Automatisierungsprojekte aus der Praxis. Von der automatisierten Regenwurmfarm über einen Berliner-Picker bis hin zum Agrarroboter, der Unkraut erkennt und vernichtet. Mehrere tausend KMU aus aller Welt haben auf RBTX.com bereits ohne konstruktionstechnische Vorkenntnisse Automationslösungen realisiert. 95 Prozent dieser Komplettlösungen sind für unter 12.000 Euro erhältlich. Die Low-Cost-Lösungen amortisieren sich nachweislich bereits ab 3-12 Monaten. Zu den Hauptanwendungsbereichen zählen unter anderem Pick & Place-Aufgaben, die Qualitätsprüfung sowie Klebe- und Dosieranwendungen.
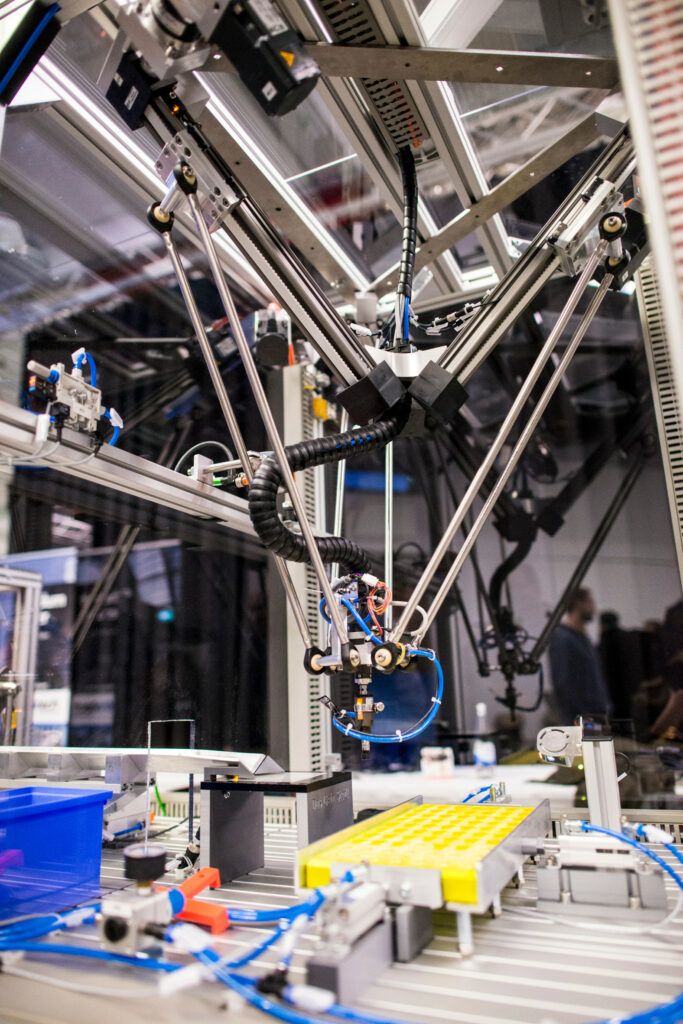
Effizientes Handling von Produkten mit Pick & Place-Robotern
Ein Pick & Place-Roboter befördert ein Objekt zuverlässig von A nach B. Häufig handelt es sich dabei um wiederholende und zeitfressende Tätigkeiten, die viel Optimierungspotenzial innerhalb einer Produktion bieten. Ob bei der Maschinenbestückung, Palettierung, Sortierung oder Vormontage. Die Vorteile von Low Cost-Roboterlösungen haben einen Automatisierungstrend in Branchen wie Landwirtschaft, Lebensmittelindustrie, Medizintechnik bis hin zum Handwerk ausgelöst. Pick & Place-Systeme finden sich vor allem zunehmend in alltäglichen Endkunden-Anwendungen, zum Beispiel in Verkaufsautomaten.
Verschiedene Robotertypen wie Gelenkarm-, Delta- oder Portalroboter können die unterschiedlichsten Anwendungsszenarios realisieren. So kommen Portalroboter zum Beispiel für das Greifen von Medikamenten zum Einsatz, um sie zur Ausgabe zu befördern, während ein SCARA Roboter als „Labor-Assistent“ das sichere Aufnehmen und Ablegen von Reagenzgläsern übernimmt – und das bereits für 7.820 Euro. Der Vorteil der Roboter-Systeme: Sie nehmen Bauteile präzise und mit konstanter Qualität auf und setzen sie am gewünschten Ablageort ab. Die Vorgänge sind exakt wiederholbar.
Automatisierte Qualitätsprüfung für mehr Präzision und Planbarkeit
Mit einer automatisierten Qualitätskontrolle lassen sich repetitive Prüfvorgänge effizient und präzise durchführen. Die Einsatzszenarien von Prüfrobotern sind so unterschiedlich und individuell wie die zu automatisierenden Arbeitsvorgänge. Ob Oberflächenprüfung, Maßprüfung oder Funktionsprüfung – Prüfprozesse und -merkmale unterscheiden sich in der Praxis stark. Mithilfe von RBTX wurde beispielsweise ein Robotersystem für das automatisierte Be- und Entladen einer Prüfstation für Leiterplatinen konfiguriert.
Ebenso ein Flächenportal, das mithilfe einer Kamera einzelne Uhren ansteuert, um visuell zu prüfen, ob sich Minuten- und Sekundenzeiger bewegen. Ein Roboterarm kommt unter anderem auch bei der End-of-Line-Prüfung von Ladegeräten für Elektrofahrzeuge zum Einsatz. Prüfprozesse lassen sich durch den Einsatz von Robotern effizient verschlanken und besser planen. Darüber hinaus arbeiten Roboter rund um die Uhr ohne Qualitätseinbußen. Es werden identische Vorgänge und eine präzise, gleichbleibende Messung des Prüfmerkmals sichergestellt.
Sicher kleben und dosieren – ohne Materialverschwendung
Neben Prüf- und Pick & Place-Aufgaben kann auch das Auftragen von Klebe-, Versiegelungs-, Lackiermitteln und Isolierschäumen effizient automatisiert werden. Meistens geht es darum Materialverschwendung zu vermeiden und präziser zu kleben bzw. zu dispensieren. Und dafür benötigt man keinen Roboter mit Investitionskosten im 6-stelligen Bereich. Mit Low Cost-Robotern kann fast alles verklebt werden. Sie erreichen eine Präzision von ca. 0,5 mm. Ein weiterer Grund ist die Arbeitsplatzsicherheit. Denn der Roboter kann problemlos mit Chemikalien in Berührung kommen und unterstützt bei unergonomischen Arbeiten. Vor allem Klebeprozesse an kleinen Werkstücken, erfordern ein hohes Maß an Konzentration und Präzision. Dabei ist es häufig wichtig, dass der Kleber das Bauteil exakt abdichtet. Dort liegt die Automation durch Roboter nah. Mithilfe von RBTX konnte zum Beispiel ein Kunde durch den Einsatz eines automatischen Dosierroboters die Geschwindigkeit beim Auftragen von Dichtungsmasse auf ein Metallteil, einem wichtigen Arbeitsschritt in seiner Produktion, vervierfachen. Die einfache Handhabung der Maschine ermöglicht es selbst ungeschulten Mitarbeitern, den Roboter sofort zu nutzen.
Für das Kleben und Dosieren lassen sich je nach Anwendung verschiedenste Robotersysteme einsetzen. Mithilfe eines eigenen Dosierroboter-Konfigurators können Anwender in nur wenigen Klicks eine individuelle Roboterlösung zusammenstellen, die präzise Klebe- und Dosiervorgänge automatisiert.
For more than 15 years, the Bionic Learning Network has been focusing on the fascination of flying. In addition to the technical decoding of bird flight, the team has researched and technologically implemented numerous other flying objects and their natural principles. With the BionicBee, the Bionic Learning Network has now for the first time developed a flying object that can fly in large numbers and completely autonomously in a swarm. The BionicBee will present its first flight show at the Hannover Messe 2024.
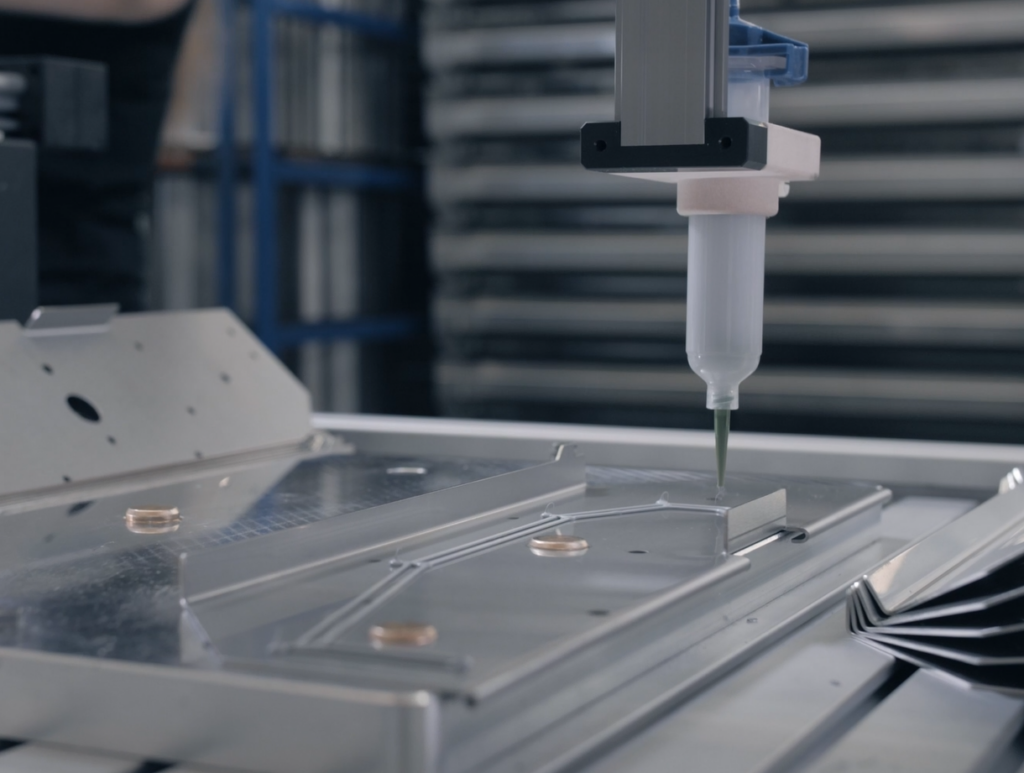
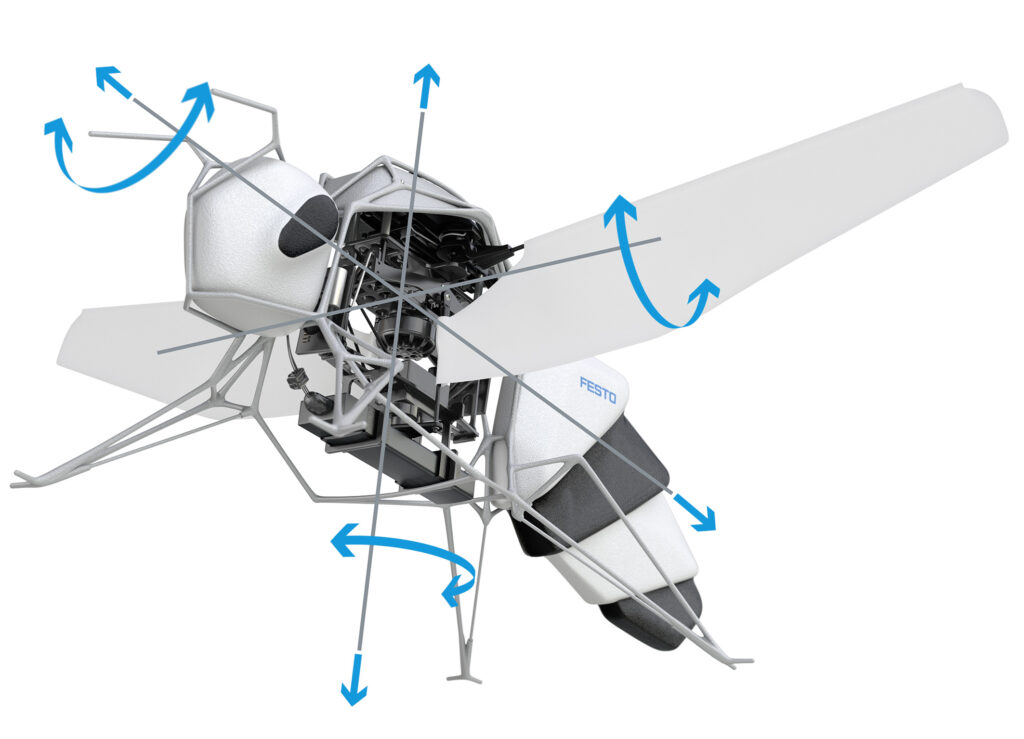
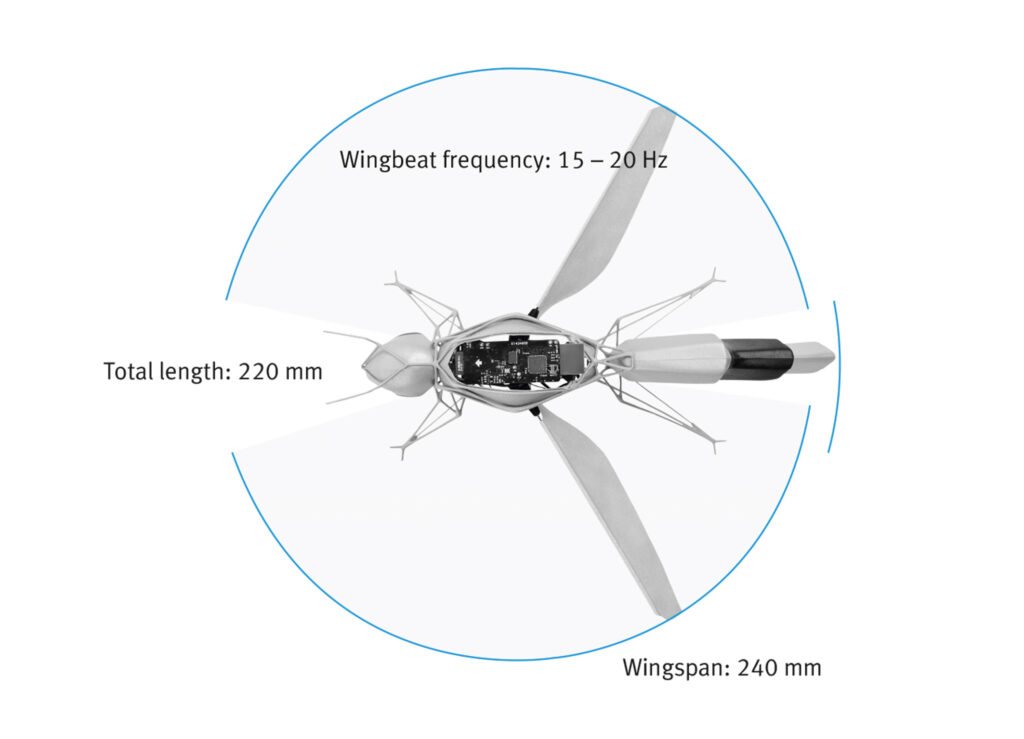
At around 34 grams, a length of 220 millimetres and a wingspan of 240 millimetres, the BionicBee is the smallest flying object created by the Bionic Learning Network to date. For the first time, the developers used the method of generative design: after entering just a few parameters, a software application uses defined design principles to find the optimal structure to use as little material as necessary while maintaining the most stable construction possible. This consistent lightweight construction is essential for good manoeuvrability and flying time.
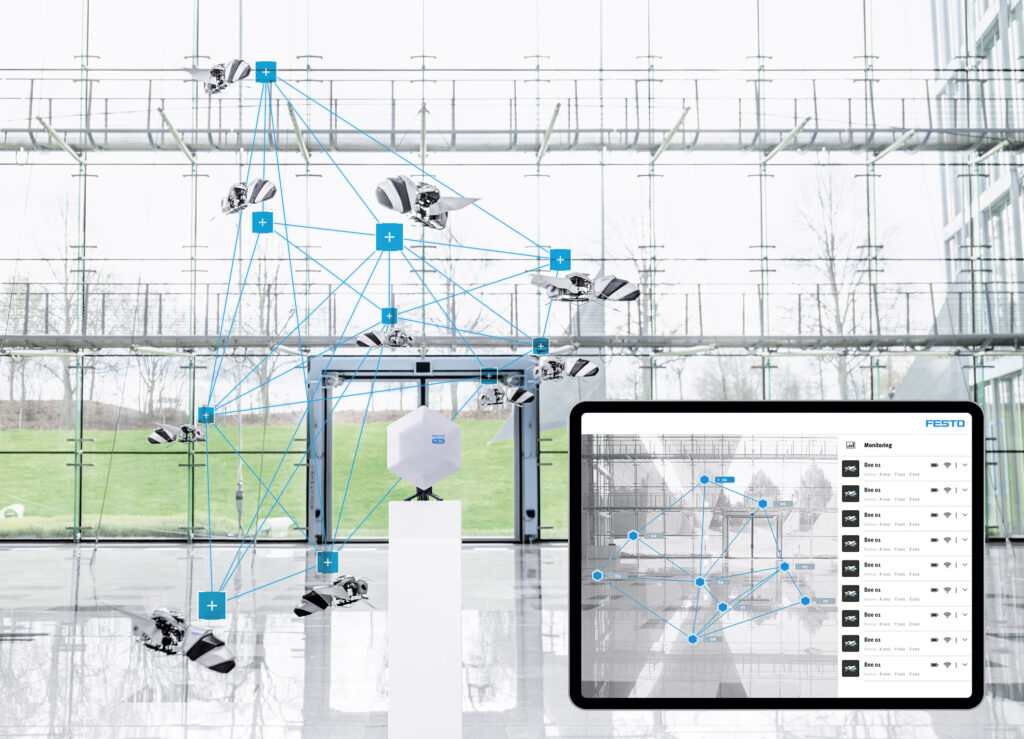
Autonomous flying in a swarm
The autonomous behavior of the bee swarm is achieved with the help of an indoor locating system with ultra-wideband (UWB) technology. For this purpose, eight UWB anchors are installed in the space on two levels. This enables an accurate time measurement and allows the bees to locate themselves in the space. The UWB anchors send signals to the individual bees, which can independently measure the distances to the respective transmitting elements and calculate their own position in the space using the time stamps.
To fly in a swarm, the bees follow the paths specified by a central computer. To ensure safe and collision-free flight in close formation, a high degree of spatial and temporal accuracy is required. When planning the path, the possible mutual interaction through air turbulence “downwash” must also be taken into account.
As every bee is handmade and even the smallest manufacturing differences can influence its flight behavior, the bees additionally have an automatic calibration function: After a short test fl ight, each bee determines its individually optimized controller parameters. The intelligent algorithm can thus calculate the hardware differences between the individual bees, allowing the entire swarm to be controlled from outside, as if all bees were identical.
Cologne/Hanover, April 24, 2024 – Mobile robotics systems are being used in more and more work areas, in e-commerce warehouses as well as in modern restaurants. Conventional models on the market start at around 25,000 euros, while solutions with an integrated robot arm start at around 70,000 euros. However, widespread use in the market is often unaffordable for small and medium-sized enterprises due to the high prices. igus wants to change this with new low-cost robotics offerings and is presenting a series of low-cost mobile plastic robots at the Hannover Messe.
The market for Automated Guided Vehicles (AGV) and Autonomous Mobile Robots (AMR) is booming: The global market for mobile robotics, including service robotics, is currently worth around 20.3 billion US dollars, and experts expect it to almost double by 2028. 1 Mobile robots are particularly common in intralogistics and industrial applications. And even in the catering industry or in hospitals, the smart helpers are increasingly making their rounds. This is also the case at motion plastics specialist igus: For four years now, the plastics experts have been successfully testing AGVs in-house – driverless racks that deliver mail and deliveries to offices, as well as mobile robots in production that move transports and stack-and-turn containers. The experience gained flows directly into the development of a new low-cost automation product line, the „ReBeL on Wheels“. Their goal: to pave the way for small and medium-sized enterprises (SMEs) to use cost-effective mobile robotics.
Mobile ReBeL solutions for education, logistics and service The basis of any mobile robotics system is the ReBeL. The use of plastic makes the robot particularly affordable at 4,970 euros and, with a dead weight of 8.2 kilograms, the lightest service robot with cobot function in its class. All mechanical components that make up the ReBeL are developed and manufactured by igus without exception. It has a load capacity of 2 kilograms and a reach of 664 millimetres. Various mobile systems are planned in which the ReBeL is centrally integrated: igus is launching an affordable version for the education sector for 14,699 euros – including the robot arm. The ReBeL EduMove equipped with a gripper serves as an autonomous learning platform for educational institutions thanks to open source. It has a modular design and can be flexibly expanded to include additional functions such as lidar, camera technology or slam algorithm. Another variant is an automated guided vehicle system for SMEs. It can carry up to 30 kilograms. With the optional ReBeL, simple A-to-B positioning can be made. It dispenses with expensive sensor technology and instead relies on 3D sensor technology developed in-house. The price is 17,999 euros. In addition, igus will be showcasing a study of a service robot at a low price in Hanover. The ReBeL Butler is suitable for simple but time-consuming pick-up and drop-off services, for example in the hotel and catering industry.
A lighthouse project on wheels The goal of all these developments is the lighthouse project, a mobile robot with integrated HMI and vision that could even tidy up an office on its own. „With this project, we are pursuing a bottom-to-top strategy, in which certain components such as safety laser scanners are not included in the basic package in order to keep the price low,“ explains Alexander Mühlens, authorized signatory and head of the low-cost automation business unit at igus. „Nevertheless, it ensures that the solution can be retrofitted for industrial requirements.“ Among other things, igus is presenting an affordable gripper with a large stroke and travel this year, which offers a high degree of flexibility when gripping different geometries. Alexander Mühlens: „The areas of application for this targeted low-cost AMR are extremely diverse and go far beyond simple transport tasks. They encompass a huge range of applications in various areas of life, such as cleaning tasks or serving coffee directly at the workplace.“