Robots-Blog trifft Alexander Mühlens und igus ersten humanoiden Roboter „Iggy Rob“ auf der automatica
Antworten


Georg-Simon-Ohm-Berufskolleg setzt auf ReBeL Cobots und Education Kits von igus, um Schülern einen einfachen Einstieg in die Roboter-Programmierung zu ermöglichen
Köln, 17. Juni 2025 – Junge Menschen für Technik begeistern: Dieses Ziel verfolgt der Kunststoffspezialist und Robotikhersteller igus mit seinen Bildungsangeboten speziell für Schulen, Hochschulen und Universitäten. Dazu zählt auch das ReBeL Education Kit: Ein Lernpaket, das Schülern und Studierenden den spielerischen Einstieg in die Robotik mithilfe des ReBeL Cobots ermöglichen soll. Zum Einsatz kommen die Education Kits unter anderem am Georg-Simon-Ohm-Berufskolleg in Köln. So bekommen die Schüler die Möglichkeit, erste Programmierkenntnisse zu erwerben und praxisnahe Anwendungen zu erproben.
Von Elektrotechnik über Datenbankwissen bis hin zur Softwareentwicklung: Die Ausbildung zum Informationstechnischen Assistenten am Georg-Simon-Ohm-Berufskolleg in Köln umfasst ein vielseitiges Lehrprogramm. Dazu gehört auch das Programmieren von Robotern, um den Schülern besondere Qualifikationen in der Automatisierungstechnik zu vermitteln. „Für unsere Robotik-Klasse kamen bisher humanoide Robotiksysteme zum Einsatz, die jedoch mit der Zeit störungsanfällig geworden sind“, erklärt Kevin Meyer, Lehrer für Elektrotechnik und Robotik am Georg-Simon-Ohm-Berufskolleg. „Daher brauchten wir Ersatz für die alten Systeme und haben uns gezielt auf die Suche nach Roboterarmen gemacht, die einfach zu bedienen sind und realitätsnahe Anwendungsszenarien ermöglichen.“ Fündig wurde das Berufskolleg schließlich beim Kölner Kunststoffspezialisten igus.

Programmieren lernen mit realitätsnahen Anwendungsbeispielen
„igus war uns bereits für seine Energieketten bekannt, doch bei unserer Suche sind wir dann auch auf das Low-Cost-Automation-Angebot gestoßen und haben gleich einen Beratungstermin vor Ort ausgemacht“, erzählt Kevin Meyer. Auf der 400 Quadratmeter großen Customer Test Area können Kunden zahlreiche Automationslösungen aus der Praxis in Aktion sehen und gemeinsam mit den Robotik-Experten von igus die Machbarkeit ihrer geplanten Anwendung testen. Die Wahl fiel schließlich auf zehn ReBeL Cobots mit sechs Achsen inklusive Education Kits. „Roboter gibt es auf dem Markt zwar viele, aber die Alternativen waren für unsere Zwecke entweder zu klein oder zu teuer. Zudem war für uns auch eine leichte Bedienbarkeit wichtig.“ Der ReBeL Cobot mit einem Gewicht von nur 8,2 Kilogramm, einer Traglast von zwei Kilogramm und einer Reichweite von 664 Millimetern ist in der vollausgestatteten Plug-and-Play-Variante bereits für 4.970 Euro erhältlich. Im Education Kit enthalten sind über 100 Stunden Lernmaterial und Projektplatten, die auf eine Arbeitsfläche montiert werden. Anhand derer lassen sich unterschiedliche Szenarien mit Realitätsbezug programmieren: ob Behälter in ein Hochregal sortieren, Bauteile eines Fahrrads vom Förderband nehmen und an der entsprechenden Stelle einsetzen oder die Qualitätskontrolle am Fahrrad. Die kostenlose und lizenzfreie igus Robot Control Software ermöglicht zudem eine einfache Bedienbarkeit und erleichtert den Einstieg in die Roboterprogrammierung.
Lernende gezielt auf die moderne Arbeitswelt vorbereiten
Die ReBeL Cobots und Education Kits sind inzwischen seit einem Jahr in vier Robotik-Klassen des Berufskollegs im Einsatz. „Die meisten Schüler arbeiten sehr gerne mit den Robotern. Die Bedienung war am Anfang für manche noch eine Herausforderung, aber am Ende haben es alle geschafft“, erzählt Kevin Meyer. Die Software sei visuell sehr anschaulich und ermögliche den Schülern, schnell kleine Fortschritte zu machen. Alexander Mühlens, Leiter Geschäftsbereich Low-Cost-Automation bei igus betont: „Uns liegt die Förderung des Roboternachwuchses sehr am Herzen, daher freuen uns solche Projekte immer besonders. Mit unserem breiten Bildungsangebot möchten wir Schulen, Hochschulen und Universitäten dabei unterstützen, theoretisches Wissen praxisnah zu vermitteln und Lernende gezielt auf die moderne Arbeitswelt vorzubereiten.“
Mehr Informationen zum Robotik-Bildungsangebot von igus finden Sie hier:
MÜNCHEN, 17. Juni 2025 /PRNewswire/ — Vention, Anbieter der weltweit einzigen vollständig integrierten Software- und Hardware-Plattform für industrielle Automatisierung, erweitert sein Robotik-Portfolio um kollaborative Roboter der Franka Robotics GmbH, einer Tochtergesellschaft der in München ansässigen Agile Robots SE.

Franka Robotics hat sich mit seinem beliebten FR3-Roboterarm als führende Plattform in der akademischen Forschung etabliert und ist mittlerweile die bevorzugte Wahl für Doktoranden, KI-Forscher und Robotik-Labore. Mit der Aufnahme von Franka Robotics-Anwendungen in das eigene Portfolio erweitert Vention sein Angebot gezielt, um der starken Nachfrage von Hochschulen, Forschungseinrichtungen und innovationsgetriebenen Unternehmen gerecht zu werden, die bereits im Vention-Ökosystem arbeiten.
Vention präsentiert auf der Automatica 2025 (vom 24. bis 27. Juni) in München erstmalig eine Live-Demonstration mit einem FR3-Roboter von Franka Robotics (Stand B4.307).
„Wir sind stolz, Franka Robotics im Vention-Ökosystem begrüßen zu dürfen“, sagt Francois Giguere, Chief Technology Officer von Vention. „Der sehr gute Ruf von Franka Robotics im akademischen Umfeld passt perfekt zu unserer Mission, die industrielle Automatisierung zugänglicher und intuitiver zu gestalten. Wir freuen uns über die Zusammenarbeit mit einer angesehenen deutschen Marke – Deutschland hat die Geschichte von Vention von Anfang an maßgeblich geprägt, und diese Partnerschaft markiert ein spannendes neues Kapitel auf unserem Weg.“
„Die Partnerschaft mit Vention ermöglicht es uns, die Reichweite unseres Roboters Franka Research 3 einem breiteren Anwenderkreis im akademischen Bereich und in innovativen Anwendungen zugänglich zu machen“, erklärt Henrik Hermann, Vertriebsleiter bei Franka Robotics. „Gemeinsam setzen wir uns dafür ein, innovative, benutzerfreundliche Automatisierungslösungen zu liefern, die unseren Kunden neue Möglichkeiten in der Robotik und KI eröffnen.“
Der FR3 ist ein benutzerfreundlicher, kompakter und leichter (18 kg) Roboterarm mit sieben Freiheitsgraden. Er ist sicher, hochflexibel und damit ideal für Laborumgebungen mit begrenztem Platzangebot. Dank seiner drehmomentgeregelten Gelenke verfügt er über eine Echtzeit-Kraftsensorik, mit der er Kräfte wahrnehmen und darauf reagieren kann. Dies ist entscheidend für die Forschung zur Mensch-Roboter-Interaktion, das Lernen durch Demonstration sowie die Durchführung kontaktintensiver Aufgaben mit empfindlichen Komponenten.
Vention auf der Automatica 2025
Vention zeigt auf der Automatica insgesamt vier Live-Demonstrationen, die die vollständig integrierte Automatisierungsplattform des Unternehmens in der Praxis erlebbar machen – durch die Kombination aus intuitiver Software, modularer Hardware und den KI-gestützten Funktionen von MachineMotion™ AI.
MachineMotion™ KI & NVIDIA-Technologie – Leistungsstarke Bewegungssteuerung
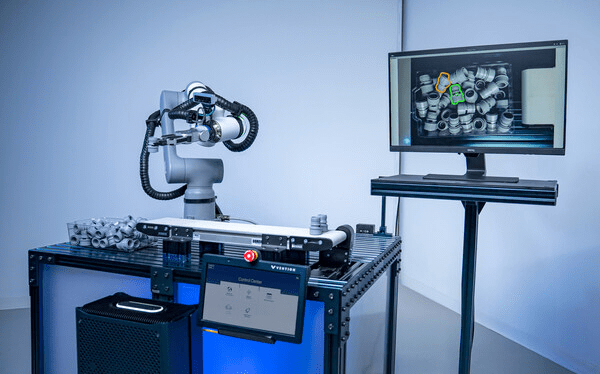
Nach der NVIDIA GTC 2025 und der Automate in den USA stellt Vention seine KI-gestützten Bin-Picking-Demonstration mit einem ABB GoFa CRB 15000 erstmals auf einer europäischen Messe vor. Auf Basis von MachineMotion™ AI, NVIDIA Jetson Computing sowie CUDA-beschleunigten Isaac-Bibliotheken und -Modellen von NVIDIA deckt die Live-Demonstration von Vention fortschrittliche Robotik, KI-basierte Bewegungssteuerung und skalierbare Schulungsszenarien ab – und zeigt, welchen konkreten Mehrwert KI bei der praktischen Implementierung robotergestützter Lösungen in der Fertigung bietet. Die Anwendung erreicht eine Greifgenauigkeit im Submillimeterbereich bei ungeordneten Fertigungsteilen – ideal für High-Mix-/Low-Volume-Produktionsumgebungen.
Modulare Demos für praxisnahe Anwendungen
Im Rahmen Automatica wird Vention den FR3-Arm von Franka Robotics bei Leiterplattentests auf einer Vention-Workstation vorführen und die Präzision und schonende Handhabung für empfindliche Elektronik und feinmotorische Aufgaben demonstrieren.
Darüber hinaus erleben Besucher vollständig integrierte, anpassbare Roboterzellen für:
Die Live-Demonstrationen finden in Halle B4, Stand 307 statt.
Weitere Informationen auf Vention.com.
Düsseldorf, 10. Juni 2025 – Epson, ein führender Anbieter von Roboter- und Automatisierungstechnik, stellt auf der automatica 2025 seine erste kollaborative Industrieroboterlösung vor. Diese ermöglicht in Branchen wie Fertigung, Logistik und dem sich schnell entwickelnden Life-Science-Sektor eine wirkungsvolle Interaktion zwischen Mensch und Maschine und steigert so die Effizienz und Produktivität. Die Lösung wird ab Herbst 2025 als erstes kollaboratives Roboter-Komplettpaket von Epson angeboten, welches den neuen, aus Carbon-Leichtbau bestehenden 6-Achs-Roboter AX6-A901S sowie die kompakte Epson RC-A101-Steuerung inklusive dem Programmiersystem AX-Portal umfasst.
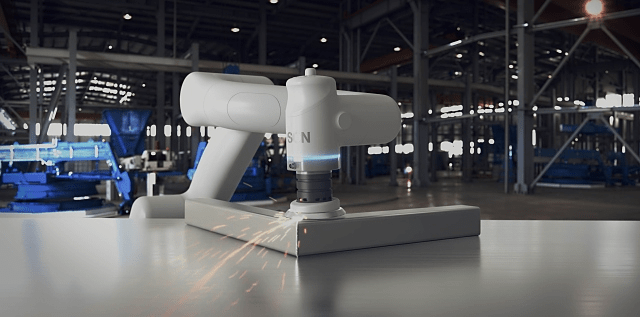
„In den stark wachsenden Bereichen Biowissenschaften und pharmazeutische Industrie sind präzise Arbeitsabläufe und ein strenges Hygienemanagement von größter Bedeutung“, erklärt Volker Spanier, Head of Manufacturing Solutions von Epson. „Um auch diese Anforderungen zu erfüllen, ist der neue kollaborative Roboter von Epson reinraumtauglich. Dank seiner präzisen Bewegungen erlaubt die Maschine daher auch in Laboren und pharmazeutischen Einrichtungen die Verrichtung selbst komplizierter Aufgaben.“
Wichtige Produktmerkmale des kollaborativen Roboters AX6-A901S von Epson:

Spanier fasst zusammen: „Epsons Engagement für die Weiterentwicklung der Robotik resultiert in diesem kollaborativen Roboter, der auch sehr komplexe Aufgaben sicher ausführt. Damit erfüllen wir die wachsende Nachfrage der Labor- und Pharmaindustrie und weiteren Branchen. Diese Maschine stellt einen bedeutenden Fortschritt auf dem Weg zur Verbesserung des Epson Angebotes im Bereich der industriellen Automatisierung dar. Unsere Roboter erfüllen dabei auch die strikten Anforderungen des Life-Science-Sektors und gewährleisten Sicherheit und Präzision bei jeder Interaktion zwischen Mensch und Maschine.“
Zu den neuen Robotern gibt es am 24. Juni eine Pressekonferenz am Epson Stand 311 in Halle B5
Weitere Informationen zu den Robotiklösungen von Epson:
automatica 2025 | Epson Europe
Die igus Steuerungssoftware für herstellerunabhängige Robotik wächst – Lebai, Hitbot und Lynx Motion jetzt verfügbar
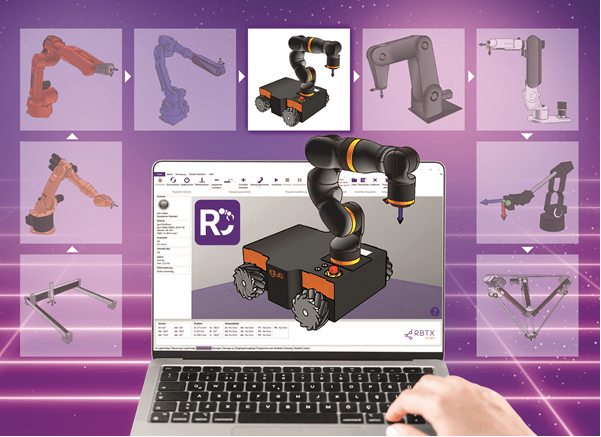
Köln, 3. Juni 2025 – Automatisierung muss nicht kompliziert sein – mit RobotCtrl wird sie für Unternehmen jeder Größe noch zugänglicher. Durch die intuitive Steuerungssoftware von igus lassen sich auf dem Online-Robotik-Marktplatz RBTX erhältliche Roboter unabhängig vom Hersteller einheitlich bedienen und Zubehör wie Kameras, Greifer oder Roboterzellen integrieren. Damit reduziert RobotCtrl die Bedienungskomplexität und den Integrationsaufwand für Einsteiger und Profis erheblich. Neu hinzugekommen ist die Unterstützung der Robotikhersteller Lebai, Hitbot und Lynx Motion.
Als führender Marktplatz für Robotik und Automatisierung vereint RBTX über 175 Anbieter und mehr als 850 Roboter und Komponenten an einem Ort. Ob Greifer, Sensoren oder komplette Robotersysteme – hier finden Interessierte alles, was sie für ihre Automatisierung benötigen. Mit der von igus entwickelten RobotCtrl wird die Integration und Steuerung von Low-Cost-Automatisierung noch flexibler und einfacher als je zuvor. Auf RBTX erhältliche Roboter können mit der Software einheitlich programmiert und gesteuert werden. Nutzer profitieren von einer verringerten Einarbeitungszeit, da sie nur eine einzige Software beherrschen müssen. Die Möglichkeit, Roboter verschiedenster Hersteller mit nur einer Steuerung zu programmieren, spart allerdings nicht nur Zeit und Schulungskosten, sondern eröffnet Unternehmen auch neue Möglichkeiten für eine herstellerunabhängige Automatisierungsstrategie. Dank des modularen Aufbaus unterstützt RobotCtrl verschiedene Roboterkinematiken unterschiedlicher Hersteller, darunter igus, Fanuc, KUKA und viele mehr. Dies ermöglicht eine nahtlose Integration verschiedener Robotiksysteme in bestehende Produktions- und Automatisierungslösungen. Die Bewegungsabläufe der Roboter können auf einer 3D-Oberfläche simuliert werden – ohne dass der Roboter physisch angeschlossen sein muss. „Dies erleichtert die Planung und Entwicklung neuer Prozesse und ermöglicht es Automatisierungsstrategien effizient zu testen bevor sie in die Praxis umgesetzt werden“, macht Alexander Mühlens, Leiter Geschäftsbereich Low-Cost-Automation bei igus, deutlich. „Unternehmen können somit schneller auf Marktanforderungen reagieren, Produktionsprozesse effizienter gestalten und so Kosten sparen.“
Roboter-Programmierung leicht gemacht
RobotCtrl wurde bereits erfolgreich mit führenden Herstellern getestet. Nutzer können somit sicher sein, dass sie mit einer bewährten und zuverlässigen Software arbeiten. Ein weiterer Vorteil von RobotCtrl ist die benutzerfreundliche grafische Oberfläche, die eine intuitive Programmierung erlaubt. Dank einer Drag-and-Drop-Funktion können Bewegungsabläufe einfach erstellt und angepasst werden. Dies reduziert den Programmieraufwand und macht die Software auch für Anwender ohne tiefgehende Programmierkenntnisse leicht verständlich. Besonders für kleine und mittelständische Unternehmen, die bisher vor der Komplexität der Robotik zurückgeschreckt sind, bietet RobotCtrl eine praxisnahe und kosteneffiziente Lösung. „Unser Ziel ist es, Automatisierung so einfach und zugänglich wie möglich zu gestalten“, stellt Alexander Mühlens heraus. „Mit RobotCtrl ermöglichen wir Unternehmen jeder Größe, einen kostengünstigen und flexiblen Einstieg in die Automatisierung.“
Weitere Informationen zu RobotCtrl und mehr als 650 erfolgreich durchgeführte Anwendungsbeispiele finden sich auf der Plattform RBTX: rbtx.com
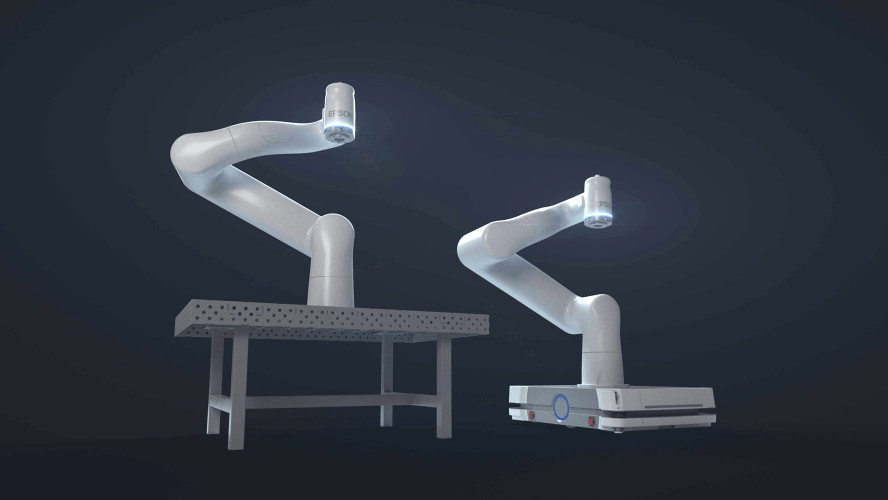
Zweiarmiger Kunststoffroboter des Kölner Unternehmens unterstützt künftig auf vielfältige Weise – Testphase vor Kauf inbegriffen
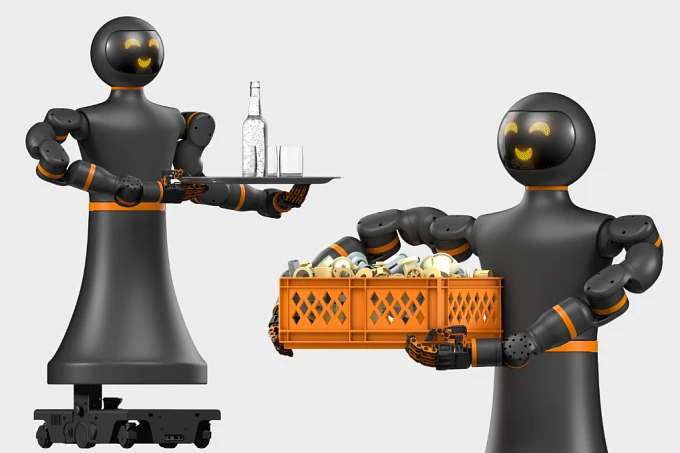
Köln, 16. April 2025 – Humanoide Roboter stehen kurz davor, die Industrie kräftig umzukrempeln. Während bisherige Systeme sehr teuer sind, bietet der motion plastics Spezialist igus mit dem Iggy Rob nun seinen ersten humanoiden Roboter als Low-Cost-Lösung an. Für 47.999 Euro unterstützt er in der industriellen Fertigung, bei Transportaufgaben oder im Service. Um Erfahrung mit dem neuen Helfer zu sammeln, ruft igus zum „Test before Invest“ auf. Der Trend zeigt in eine klare Richtung: Schätzungen zufolge könnten bis 2030 20 Millionen humanoide Roboter in der Industrie im Einsatz sein. Die Nachfrage nach der Technologie steigt auch bei europäischen Unternehmen rasant an, das Problem dabei: Humanoide Roboter sind aktuell noch sehr teuer, erste Anwendungsmöglichkeiten müssen vielerorts erst identifiziert werden. Das möchte der Kölner motion plastics Experte igus nun ändern: Mit dem Iggy Rob liefert das Unternehmen einen preisgünstigen humanoiden Roboter, der dank seiner zwei Arme und einem stabilen, rädergetriebenen Unterbau eine Vielzahl von Anwendungen ermöglicht. „Die Welt ist für den Menschen geschaffen, das Potenzial für humanoide Roboter ist deshalb riesig“, erklärt Alexander Mühlens, Leiter Geschäftsbereich Low-Cost-Automation bei igus. Acht Stunden ohne Pause im Einsatz Der Iggy Rob ist rund 1,70 Meter groß und kann sich acht Stunden lang mit nur einer Akkuladung bewegen. Ausgestattet mit einem Lächeln begrüßt er seine Kolleginnen und Kollegen mit zwei ReBeL Cobot Armen und zwei bionischen Händen. Ausgestattet mit einem LIDAR-Sensor und 3D-Kameras zur Objektdetektion navigiert der Roboter problemlos durch sein Umfeld. Zur Steuerung nutzt igus die hauseigene igus Robot Control. Der Roboter ist nach VDE 5050 für das Flottenmanagement zugelassen und besitzt eine CE-Zertifizierung. Ergänzt um eine ROS2-Schnittstelle erfüllt Iggy Rob die Ansprüche an moderne Robotik. AMR schafft die Grundlagen Die Basis von Iggy Rob bildet der Autonome Mobile Roboter (AMR) ReBeL Move. Die mobile Plattform ist dank einer Dreipunktlagerung sehr stabil. igus hat bei seinem humanoiden Roboter bewusst auf Beine verzichtet, da die Infrastruktur für AMRs in vielen Fabriken bereits fortgeschritten ist. Mit einer Traglast von 50 Kilogramm und 100 Kilogramm Zuladung schafft der ReBeL Move die Voraussetzungen für die arbeitsplatzungebundene Bewegung. Der Iggy Rob kann als Serviceroboter am Empfang arbeiten, Transportaufgaben in der Fabrik übernehmen oder in der Kantine Besteck abräumen. igus selbst plant, den Iggy Rob beim Einlegen von Bauteilen in die Spritzgussmaschinen des Unternehmens zu nutzen. „Wir gehen davon aus, dass humanoide Roboter zu Beginn vor allem für industrielle Zwecke interessant sind“, erklärt Alexander Mühlens. Gemeinsame Fortentwicklung: „Test before Invest“ In der Weiterentwicklung des Iggy Robs zählt igus auf seine Kunden. Der Hersteller bietet bereits vor dem Kauf ein „Test before Invest“-Programm an, bei dem die igus Experten die Potenziale vor Ort evaluieren und Einsatzmöglichkeiten am realen Roboter prüfen. Ist der Test überzeugend, so ist der Iggy Rob zu einem im Marktvergleich niedrigen Kaufpreis von 47.999 Euro erhältlich. „Bisher erhältliche humanoide Roboter kosten teils zwei- oder dreimal so viel“, sagt Mühlens. Mehr Informationen zum humanoiden Roboter finden Sie unter: https://www.igus.de/automation/news/humanoider-roboter |

| Wittekindshofer Werkstätten realisieren behindertengerechten Arbeitsplatz mit Low-Cost-Roboter für 4.970 Euro Köln, 10. April 2025 – Daniel Hillebrand leidet an einer Tetraspastik, die eine kontrollierte Bewegung der Extremitäten unmöglich macht. Trotzdem kann er selbstbestimmt arbeiten – dank eines automatisierten Arbeitsplatzes, den die Diakonische Stiftung Wittekindshofer Werkstätten aus Bad Oeynhausen trotz engen Budgets mit einem Low-Cost-Roboter von igus realisiert hat. Für dieses kreative Inklusionsprojekt erhielt die Stiftung jetzt den ROIBOT Award. Der Wettbewerb zeichnet innovative und wirtschaftliche Automatisierungsprojekte aus, die mithilfe von igus Produkten erfolgreich umgesetzt wurden. Zu den weiteren Preisträgern zählen das niederländische Unternehmen Paperfoam, das französische Forschungsinstitut CNRS und die Universität Politecnico aus Mailand. Daniel Hillebrand sitzt im Rollstuhl und bewegt mit seinem Kinn einen Joystick. Damit steuert er einen Roboterarm, der Kunststoffbauteile sortiert. Mehrere Stunden pro Tag, ohne fremde Hilfe. „Daniel ist es gewohnt, in seinem Leben fast vollständig auf Hilfe angewiesen zu sein“, sagt Torsten Jeschke, Elektriker und Erzieher in den Wittekindshofer Werkstätten. „Dank der neuen Anlage kann er nun trotz seiner schweren Lähmung selbstbestimmt arbeiten.“ Das sei für ihn der Himmel auf Erden. „Der Roboter ist cool“, bestätigt Daniel Hillebrand. „Ich musste in die Technik erst reinkommen, aber mittlerweile läuft alles richtig gut. Am schönsten ist es, wenn der Sack nach langer Arbeit voll ist.“ „Ein Automationsprojekt, das für uns bei igus besonders ergreifend ist.“ Marktübliche Industrieroboter wären für die Wittekindshofer Werkstätten unerschwinglich und in der Steuerung zu komplex gewesen. Jeschke hat deshalb eine günstigere Lösung zusammengestellt, die sich ähnlich leicht bedienen lässt wie ein Computerspiel – mithilfe der Low-Cost-Robotik-Plattform RBTX von igus. Herzstück und Daniel Hillebrands Armersatz ist dabei der ReBeL, ein Gelenkarmroboter aus Hochleistungskunststoff für nur 4.970 Euro. igus hatte den ROIBOT-Wettbewerb zum mittlerweile dritten Mal ausgeschrieben, um Unternehmen und Organisationen auszuzeichnen, die mithilfe des RBTX-Marktplatzes besonders smarte und wirtschaftliche Automationsprojekte realisieren. Die Gewinner erhalten Gutscheine für Robotik-Hardware im Wert von bis zu 5.000 Euro. „Für uns ist es wirklich ergreifend zu sehen, wie es die Wittekindshofer Werkstätten geschafft haben, mit begrenzten finanziellen Ressourcen und dafür umso mehr Fantasie ein Automationsprojekt auf die Beine zu stellen, welches das Leben eines Menschen so sehr verbessert. Wir hoffen, dass sie den 5.000 Euro-Gutschein nutzen können, um in Zukunft noch weitere Projekte dieser Art umzusetzen“, sagt Alexander Mühlens, Leiter des Geschäftsbereichs Low-Cost-Automation bei igus und Schirmherr der ROIBOT Awards. igus selbst hat die Good Work Charter des Verband Deutscher Maschinen- und Anlagenbauer unterschrieben und sich damit dem positiven Beitrag von Robotik zur Gesellschaft verpflichtet. Die Charta betont, dass Robotik und Automatisierungstechnologien nicht nur die Produktivität steigern, sondern auch das Leben der Menschen verbessern können, indem sie Arbeitsbedingungen optimieren und neue Möglichkeiten schaffen. Die weiteren Preisträger: Roboterkomponenten für die Qualitätssicherung, Astroteilchenphysik und automatisierte Obsternte Platz zwei und 2.500 Euro für Robotik-Hardware gehen an Paperfoam. Die niederländische Firma hat den Gelenkarmroboter ReBeL von igus mit einer Kamera ausgestattet, um ihre biobasierten und recycelbaren Verpackungen stichprobenweise auf Produktionsfehler zu prüfen. Die Lösung reduziert die körperliche Belastung der Mitarbeiter und erhöht gleichzeitig die Qualität der Produktion. Über Platz drei und 1.000 Euro freut sich das französische Forschungsinstitut Centre national de la recherche scientifique (CNRS) für die Entwicklung einer Kalibriervorrichtung eines Teleskops für die Astroteilchenphysik. Durch den Einsatz von schmierfreien Linearachsen von igus erreichen die Konstrukteure eine hohe Präzision und Wartungsfreundlichkeit. Der Sonderpreis für Bildungseinrichtungen und ebenfalls 1.000 Euro gehen an die wissenschaftliche-technische Universität Politecnico in Mailand. Sie hat mit dem ReBeL Roboterarm einen mobilen Manipulator konstruiert, der die Obsternte durch Automatisierung effizienter und weniger arbeitsintensiv gestaltet. „Die Gewinner beweisen, dass Automation heute nicht mehr nur eine Frage des Geldes ist“, so Mühlens abschließend. „Auch mit kleinen Budgets und Kreativität lassen sich wirtschaftliche Automationslösungen mit einem schnellen Return on Invest realisieren. Wir freuen uns schon darauf weitere spannende und kostengünstige Automatisierungsprojekte beim nächsten ROIBOT Award kennenzulernen.“ Erfahren Sie mehr über den ROIBOT Award und die Gewinner auf: https://www.igus.de/automation/service/gewinner-roibot |

SAN JOSÉ, Kalifornien, 18. März 2025 /PRNewswire/ — Vention, Entwickler der weltweit einzigen Full-Stack-Software- und Hardware-Automatisierungsplattform, präsentiert seine KI-gestützte Bin-Picking-Technologie erstmals auf der NVIDIA GTC, der weltweit führenden Entwicklerkonferenz für Künstliche Intelligenz (KI).
Dieses neue, KI-gesteuerte Verfahren ersetzt aufwendige und kostenintensive individuelle Programmierlösungen und erleichtert Unternehmen die Einführung von Automatisierungstechnologie. Die Markteinführung der KI-gestützten Bin-Picking-Technologie ist im weiteren Verlauf des Jahres geplant.
In einer Live-Demonstration wird ein ABB GoFa™ CRB 15000-Roboter – ausgestattet mit einem Vision-System, Finger-Greifern und verbunden mit einem Vention MachineMotion AI-Controller – seine autonomen Fähigkeiten unter Beweis stellen. Mithilfe einer hochgeladenen CAD-Datei des zu verarbeitenden Bauteils versteht der Roboter, wie er das Bauteil erkennen, auswählen, greifen und mit branchenführender Präzision organisieren kann. Diese autonome Funktionalität wird durch leistungsstarke KI-Modelle ermöglicht.
„KI entwickelt sich in rasantem Tempo weiter und hilft Vention dabei, Automatisierung für Unternehmen jeder Größe noch zugänglicher zu machen“, erklärt Etienne Lacroix, Gründer und CEO von Vention. „Unsere neueste Innovation, die Hardware-Integration mit NVIDIA-KI-Modellen kombiniert, geht über reines Identifizieren und Greifen hinaus – sie fügt Intelligenz und Organisation hinzu, wodurch teure Integrations- und Programmieraufwände reduziert werden. Das macht Bin-Picking-Automatisierung für Hersteller erschwinglicher.“
„Generative KI und Simulationstechnologien haben einen Wendepunkt erreicht, um physische KI-Anwendungen in der Produktion voranzutreiben“, sagt Deepu Talla, VP of Robotics bei NVIDIA. „Mit der NVIDIA Isaac Robotics-Plattform bringt Vention die neuesten KI-Innovationen in Fabriken jeder Größe – sowohl für High-Mix- als auch für High-Volume-Fertigung.“
Entdecken Sie hier das KI-gestützte Bin-Picking-Demo-Video.
KI zur Lösung realer Herausforderungen
Die Demonstration ist Teil eines laufenden Entwicklungsprojekts mit McAlpine & Co. Ltd, einem langjährigen Vention-Kunden und führenden britischen Hersteller von Sanitärprodukten mit über 100 Jahren Erfahrung. Das Unternehmen sucht nach einer Automatisierungslösung für Bin-Picking und Maschinenbestückung.
John Gordon, General Manager von McAlpine & Co. Ltd, betont die Herausforderungen, die mit der Automatisierung des Bin-Picking-Prozesses verbunden sind, obwohl es sich auf den ersten Blick um eine einfache Aufgabe handelt: „McAlpine & Co. Ltd war auf der Suche nach einem Automatisierungspartner, dem wir vertrauen können, um unsere Vision umzusetzen: innovative Lösungen, die unseren hohen Qualitätsstandards entsprechen. Im Zentrum dieser Vision steht eine kollaborative Arbeitsumgebung, in der Maschinen arbeitsintensive und repetitive Aufgaben übernehmen, sodass sich unsere Mitarbeiter auf wertschöpfende Tätigkeiten konzentrieren können. Nach dem erfolgreichen Abschluss unseres ersten Automatisierungsprojekts mit Vention sind wir überzeugt, dass nun der richtige Zeitpunkt gekommen ist, um gemeinsam eine hochmoderne, KI-gestützte Bin-Picking-Lösung zu entwickeln.“
Vention Intelligence – Schnellere Wertschöpfung für Hersteller
Der MachineMotion AI-Controller von Vention, basierend auf der NVIDIA Jetson Orin Module-on-Compute-Plattform, bildet das Rückgrat der neuen Entwicklung – er ermöglicht die Echtzeitverarbeitung, die für eine autonome Bin-Picking-Automatisierung im industriellen Maßstab erforderlich ist. Dieses Steuerungssystem geht über herkömmliche SPS-basierte Automatisierung hinaus und verkürzt die Implementierungszeit erheblich.
Durch die Integration modernster, KI-gestützter NVIDIA Isaac CUDA-Bibliotheken und Modelle wie FoundationPose stellt Vention sicher, dass Hersteller von den neuesten KI-Fortschritten profitieren, die jetzt in den Markt eintreten.
„Unsere Strategie, KI-Technologien nahtlos in bestehende Automatisierungslösungen zu integrieren, stellt sicher, dass wir neue Modelle schnell in unsere schlüsselfertigen und anpassbaren Arbeitszellen einbinden können – und damit unseren Kunden aus der Fertigungsindustrie einen Wettbewerbsvorteil verschaffen.“ – François Giguère, Chief Technology Officer bei Vention.
Für weitere Informationen besuchen Sie: www.vention.com/autonomous-operator