If you are an experienced Maker, or even just a passing Tinkerer, the RoboHeartTMHercules development board may be just what you are looking for.
RoboHeart is an exceptional development board that proudly boasts: “One board to rule them all!” This exceptional circuit board is just what is sounds like: the heart of your robotics Maker project.
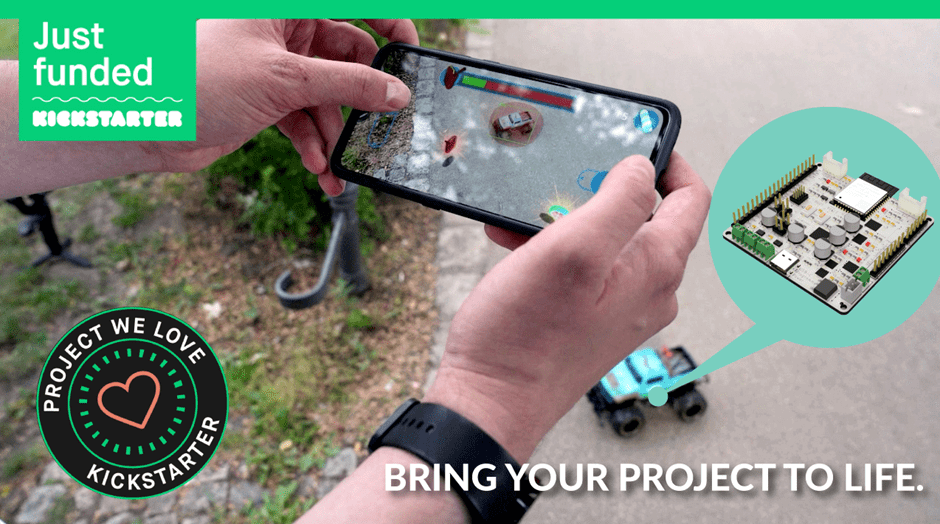
At Augmented Robotics, we have gone the extra mile by combining the magic of Augmented Reality with embedded mobile systems, so you can play and manipulate brave new worlds using only your smartphone. This allows you to control any RC device or creative Maker project with connectivity in WiFi, BLE and even 5G when paired with out RoboHeart Vela board. On Tuesday, August 23, 2022, RoboHeart was launched on Kickstarter, and it reached its funding goal in less than three hours! In only two short days, RoboHeart was selected as the coveted “Project We Love” by Kickstarter – an award given to projects that really stand out with creative innovation.
By replacing the circuit board inside your RC car with RoboHeart, you can drive the car with only your smartphone – so we have decided to add an original AR game on top of that. Drive around and collect candies to get the most points… but careful not to run out of fuel! As we reach more stretch goals, the game will get increasingly complex. We have already reached our first stretch goal – Gamepad compatibility – but there are many more to come.
The Maker community is the most creative community out there, so RC cars are definitely not the only thing your RoboHeart board can be used for. Put the board into any electronics project and watch it come to life!
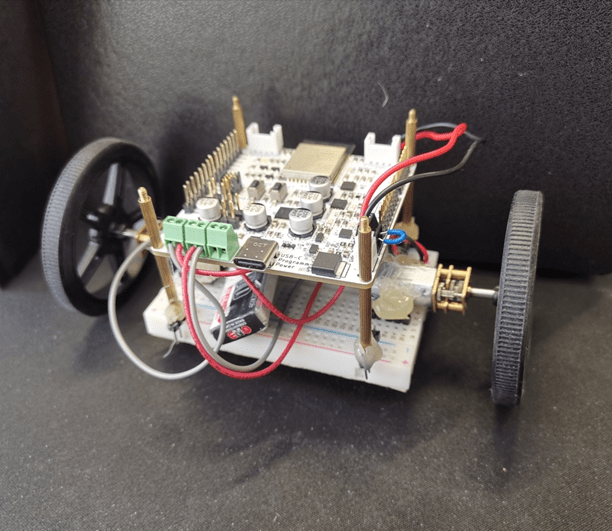
Get RoboHeart and dive right into building projects with an open-source RoboHeart Arduino library on GitHub! Our repository has several cool examples at varied complexities, from reading the IMU sensor data to controlling things with your smartphone. For example, we have built our own Balancing Bot using only one board:
The RoboHeart Hercules has all the features one needs to start building:
ESP32-WROOM32 with dual-core and WiFi+Bluetooth capabilities
Arduino compatibility for easy programming
An integrated Inertial Measurement Unit (IMU) for motion data
Three DC motor outputs
USB-C connector with auto-download feature: flashing is a piece of cake!
LiPo battery input with auto-charging feature: where do you need Power most, at USB or LiPo? RoboHeart will automatically distribute power where it is most needed
Convenient peripherals for Makers: GROVE, JST and JTAG
… and with the addition of the RoboHeart Vela extension board, Makers can unlock the power of 5G, and no longer be dependent on the BLE range of 50m.
So the only question that remains is: What will YOU do with RoboHeart?
Synapticon macht MOTORCORTEX als Online-Version verfügbar
Böblingen, den 04.08.2022 – Auch in der Welt des Maschinenbaus und der Robotik hat sich Software in den vergangenen Jahren zum entscheidenden Erfolgsfaktor entwickelt. Sowohl die Art und Weise wie Robotersteuerungen entwickelt werden als auch ihre Leistungsfähigkeit in der Praxis sind für die Hersteller von Industrierobotern von großer Bedeutung. Vor diesem Hintergrund hat Synapticon mit MOTORCORTEX.io nun eine bahnbrechende Lösung im SaaS (Software as a Service) Modell vorgestellt. Sie ermöglicht es sehr leistungsfähige, 100% individuelle Robotersteuerungen komfortabel in der Cloud zu entwickeln, auf Steuerungen im Feld bereitzustellen und über einen digitalen Zwilling zu testen. In der Serienproduktion des Roboters bzw. Automatisierungsprodukts kann die individuelle Steuerungs-Software dann in Masse bereitgestellt und auch offline betrieben werden. Dafür können neben Industrie-PCs auch Embedded-Module bis hin zu einem Raspberry Pi eingesetzt werden.
„Die Automatisierung hat in den vergangenen Jahren nochmals deutlich an Fahrt aufgenommen. Tragende Elemente sind dabei unter anderem fahrerlose Transportsysteme (AGV/AMR) sowie Cobots und Leichtbauroboter. Diese Systeme stellen nicht nur neue Herausforderungen an die Hardware, sondern auch an die Software, speziell wenn es um Themen wie Navigation, Sicherheit und das Erlernen von Abläufen geht“, erklärt Nikolai Ensslen, CEO und Gründer von Synapticon. „Die große Herausforderung ist nun für viele Hersteller: Sie müssen ihren Kunden Lösungen anbieten, die preislich attraktiv und immer auf dem neuesten Stand der Technik sind. Die Unternehmen sollen also in der Lage sein, individuelle Steuerungssoftware für ihre Systeme schnell und kosteneffizient zu entwickeln. Hierfür haben wir mit MOTORCORTEX nun eine Lösung im Angebot, die am Markt einmalig ist und welche die Entwicklungszeit von Robotersteuerungen drastisch verkürzt.“
Echtzeit-Steuerungsanwendungen in der Cloud erstellen und auf Offline-Steuerungen deployen sowie aus der Ferne warten
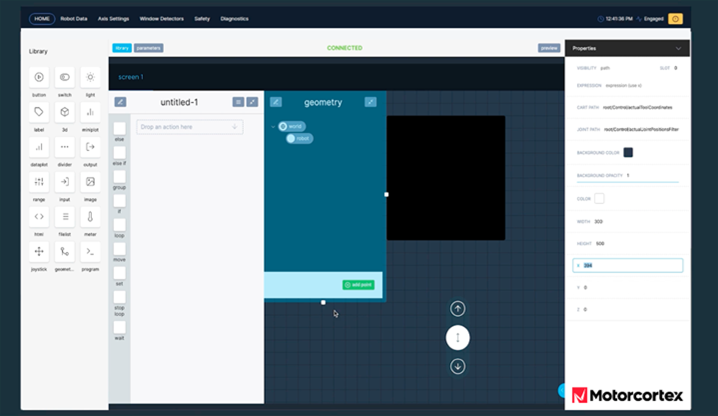
MOTORCORTEX umfasst ein ganzes Paket an Apps bzw. Templates und Tools zum Entwerfen, Steuern, Analysieren und Bereitstellen von industriellen Automatisierungsanwendungen. Dazu gehört beispielsweise auch ein Widget für die einfache grafische Programmierung (“no code”) von Robotern, was im Bereich der Cobots zum Standard wird. Die Plattform für individuelle Roboter- und Maschinensteuerungen ist mit modernster Softwaretechnologie implementiert, erfüllt alle Anforderungen der Automation der Zukunft und ist zugleich hoch leistungsfähig und skalierbar.
Das integrierte Linux-basierte und ressourcenoptimierte Betriebssystem bietet Echtzeitsteuerung von industrieller Hardware über EtherCAT, wie z.B. auf Synapticon SOMANET basierende Antriebsachsen und eine sehr leistungsstarke Kommunikationsschicht für Anwendungen auf höherer Ebene, wie z. B. eine Benutzeroberfläche oder Datenanalysetools. MOTORCORTEX ermöglicht Hochgeschwindigkeits-Streaming-Kommunikation direkt zum Webbrowser ohne Zwischenserver, was in der Industrie eine Wende darstellt. Es ist jetzt möglich, reaktionsschnelle Webanwendungen für eine extrem reibungslose Interaktion mit Maschinen zu erstellen. Die Lösung bietet offene APIs für alle wichtigen Programmiersprachen wie Javascript, Python und C++. Diese offene Architektur bietet viel mehr Freiheiten als aktuelle industrielle Steuerungssysteme und ermöglicht echte Industrie 4.0-Anwendungen mit nur wenigen Codezeilen. Die Kommunikation mit umgebenden bzw. höher liegenden Steuerungseinheiten wird über OPC UA unterstützt.
„Die Nutzung von MOTORCORTEX ist so einfach wie das Einrichten einer einfachen Webseite. Mit etwas Konfigurationsarbeit und ein paar Zeilen Code können sich Entwickler von jedem Webbrowser aus direkt und sicher mit ihrer Maschine verbinden und schnell Daten austauschen. Kein anderes industrielles Steuerungssystem ist so einfach und flexibel für anspruchsvolle und moderne Steuerungsaufgaben einzurichten“, erklärt Nikolai Ensslen. „Anwendungen, die auf MOTORCORTEX basieren, teilen alle ihre Daten automatisch in der darunterliegenden Echtzeitdatenbank, so dass externe Anwendungen oder Dienste einfach und sicher auf die Daten zugreifen können.“
Entwicklung beschleunigt, Kosten gesenkt
Erste Projekte mit Kunden zeigen, dass es Entwicklern mit MOTORCORTEX in der Cloud gelingt, den Entwicklungsprozess von Software um bis zu 90% zu reduzieren. Zugleich sinken tatsächlich die Kosten für die Softwareentwicklung deutlich, da MOTORCORTEX auf ein einfaches Lizenzmodell ohne zusätzliche Kosten für Wartung und Weiterentwicklung setzt. Da MOTORCORTEX zudem vollkommen Hardware-unabhängig ist, bleibt es den Entwicklern freigestellt, welche Hardware-Komponenten sie für die Entwicklung ihrer Steuerungssoftware nutzen. Ideale Resultate und höchste Effizienz verspricht dabei die Kombination der MOTORCORTEX-Software mit den SOMANET-Servoantrieben aus dem Motion Control-Portfolio von Synapticon.
MOTORCORTEX hat nicht den Anspruch, der eigenen Softwareentwicklung von Roboterherstellern oder innovativen Steuerungslösungen von Drittanbietern, etwa zum einfachen Teachen von Robotern oder für die Integration von Bildverarbeitung und KI, zuvor zu kommen bzw. diese zu ersetzen. Die Plattform soll vielmehr als solide Grundlage für diese dienen und die Entwickler in der Basis entlasten.
„MOTORCORTEX versteht sich, ebenso wie die SOMANET-Elektroniken, als im Endprodukt versteckte Infrastruktur. Sie soll ein leistungsfähiges, zuverlässiges Fundament für die modernsten und innovativsten Robotersteuerungen zur Verfügung stellen. Wir sehen uns als Technologie- und Infrastrukturpartner der besten Innovatoren in Robotik und Automation,” fasst Nikolai Ensslen zusammen. „Ich bin mir sicher, dass wie in vielen anderen Industriebereichen zukünftig Software auch in der Robotik zu einem wesentlichen und kritischen Unterscheidungsmerkmal wird. Mit MOTORCORTEX geben wir Unternehmen hierfür die beste Plattform in die Hand, so dass diese sich auf die relevanten Innovationen für Ihre Kunden und die Differenzierung von ihrem Wettbewerb konzentrieren können.“
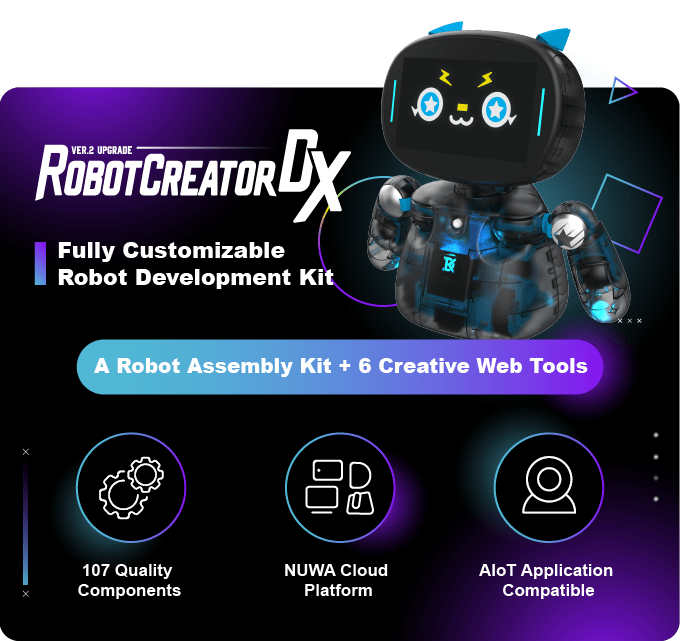
RobotCreator DX offers intuitive software interfaces to make customization and interaction with the robot unintimidating for beginners and advanced users alike.
Taipei, Taiwan, 07 July, 2022 – NUWA announced on Kickstarter, the all-new RobotCreator DX, a highly customizable AI robot companion designed for users of all levels of skills.
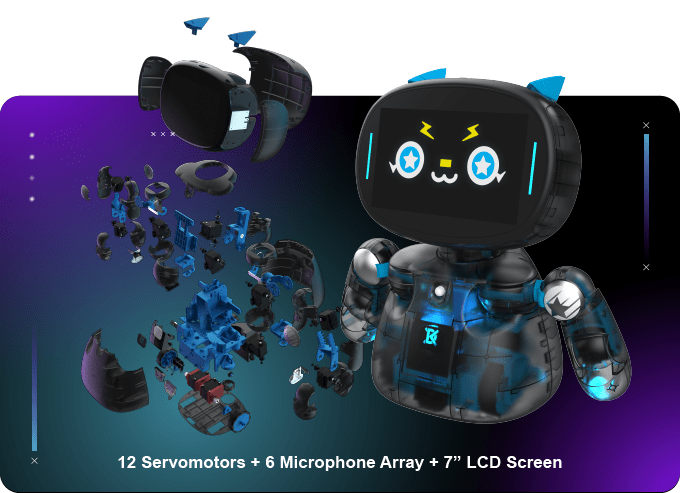
Featuring numerous web-based editing software and a wide array of sensors, RobotCreator DX can be programmed to perform complicated tasks including voice recognition, video calls, interactive games, and many more.
Thanks to the advanced RoFlow Workflow interface, users can effortlessly program the robot to perform various tasks without prior coding knowledge. On the other hand, Trainkit allows users to train DX to chat and respond with physical motions, images or videos.
Notable features include:
Roflow: A powerful cloud-based visual programming software that allows users to easily customize the robot’s behavior. Users can tap into the vast resources and functions of the robot without prior programming skills.
CodeLab: An easy-to-use coding center for RobotCreator DX. CodeLab can be accessed from computers, mobile devices, or the DX itself. Natively supports MQTT, CodeLab allows for cross-device control and connection.
Content Editor: A timeline-based motion editing software designed to program the robot to perform sophisticated movements with its built-in expression and movement library.
Trainkit: A chatbot dialogue design tool with fuzzy language matching. Trainkit allows users to add body movement, as well as images or videos to the response.
Quiz Editor: Quiz Editor allows users to design and create interactive games where the fun never ends. Interaction can be made using the integrated touch and audio sensors.
Skin Editor: A web-based editing software that allows users to create dynamic facial expressions for RobotCreator DX. Users can utilize the built-in templates or create their own with Adobe Photoshop or Illustrator.
MakerBase: As one of the pillars of the NUWA platform, users can connect with DX fans across the world and share resources like the code, design, and more.
RobotCreator DX Pricing and Availability
Early Bird pledges for RobotCreator DX are now available for a limited amount on Kickstarter for $599, which is more than 40% off the future retail price.
For the complete list of all available backing options and more product details, jump over to the official RobotCreator DX crowdfunding campaign page by clicking the link below.
Founded in Taipei, Taiwan in 2016, NUWA Robotics has extensive experience in AI, software/hardware development, interactive content, and mass production. We have experts across different fields to design and create a robot that can establish a deeper connection with humans. NUWA envisions a world where everyone has a robot companion that provides beyond just responses to commands, but one that can support emotional needs.
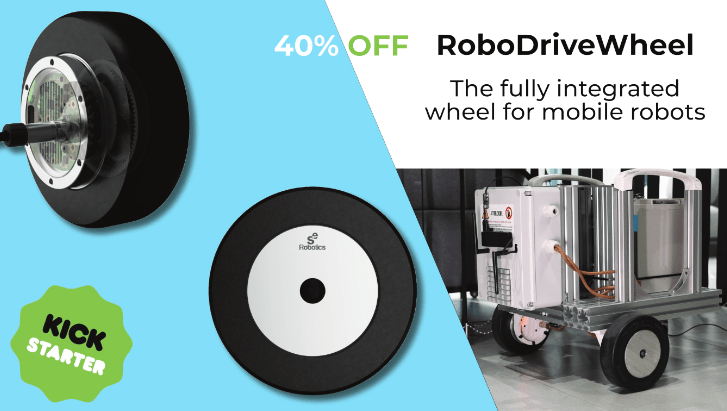
NAPLES, ITALY — S4E Robotics is pleased to announce the launch of a Kickstarter campaign that will allow the public to meet RoboDriveWheel: the fully integrated wheel for mobile robots. RoboDriveWheel is a new fully integrated motorized wheel designed specifically for the development of a new generation of safe and versatile service mobile robots.
„We believe RoboDriveWheel can help all robotics designers but also enthusiast and hobbyist to create powerful and smart mobile robots with little effort and reducing cost and time“ says Andrea Fontanelli inventor of RoboDriveWheel. „This Kickstarter campaign, to rise 43359€, will help us optimize the production process, manufacture our units and finalize our packaging components“.
RoboDroveWheel integrates Inside a Continental rubber with strong adhesion a powerful brushless motor, a high-efficiency planetary gearbox and a control board implementing state-of-the-art algorithms for torque and velocity control. Robodrivewheel can also detect impacts and collisions thanks to the combined use of torque, acceleration and inclination measurement obtained from the sensors integrated into the control board.
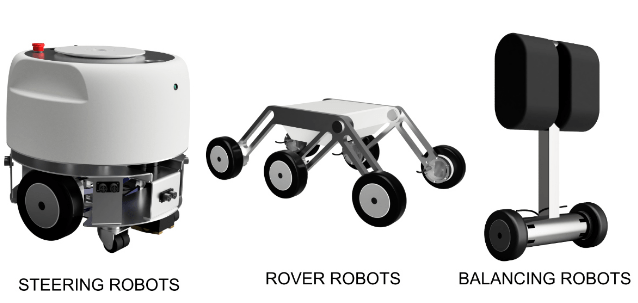
„RoboDriveWheel is the ideal solution for anyone who wants to build a mobile robot with little effort but which integrates the most modern technologies.“ says Roberto Iorio CFO of S4E Robotics. RoboDriveWheel is being produced by S4E Robotics, a company that specialised in industrial automation and robotics. They have designed and produced mobile robots such as ENDRIU: The compact and modular mobile robot for sanitization. The process of designing mobile service robots is highly time-consuming. A service robotic drive wheel must be compact, have good traction friction, must be powerful but fast enough to move the robot at a speed comparable to human speed.
Moreover, a robotic wheel must include all the functionalities, sensors, and electronics. Finally, a service robot must work close to humans so the robot should be capable to identify efficiently the interaction with the environment. Usually, all these capabilities require different components: the wheel, the shaft, one or more bearings with the housing, a traction system (pulley and belt), a motor with a reducer and encoder an IMU and the electronics with several cables for all the sensors.
RoboDriveWheel integrates all these functions inside the wheel and it is easy to connect and control through the single cable for power supply and can-bus communication, a protocol used for years in the automotive sector. To learn more about Kickstarter and supporting RoboDriveWheel’s 43359€ campaign, please visit https://www.kickstarter.com/projects/andreafontanelli/robodrivewheel
fruitcore robotics aus Konstanz zeigt auf der automatica 2022 sein Robotik-Angebot rund um die drei einfach zu bedienenden und auch für kleine und mittlere Unternehmen erschwinglichen Digital Robots HORST. Im Mittelpunkt des Messeauftritts steht die neue Komplettlösung horstCUBE plug & play für die flexible Teilevereinzelung. Auf der Leitmesse für intelligente Automation und Robotik in München präsentieren Aussteller:innen vom 21. bis 24. Juni ihre Vision einer neuen Generation von smarten Robotern. Dass diese auch für sehr viele Mittelständler interessant werden, belegt eine aktuelle Umfrage: 46 Prozent der Unternehmen mit 50-500 Mitarbeiter:innen wollen sich Roboter ins Haus holen. fruitcore robotics stellt in Halle B4 am Stand 400 aus.
Mit seinen drei HORST-Systemen bringt fruitcore robotics das Potenzial der Robotik in alle Bereiche der Wirtschaft, weit über die Produktionsstraßen im Automobilbereich hinaus. Die Neuheit horstCUBE plug & play senkt die Einstiegshürden zur Automatisierung und Digitalisierung für kleine und mittlere Unternehmen nun weiter. Anwender:innen können die Komplettlösung direkt einsetzen, um ihre flexible Teilevereinzelung von Schüttgut mittels Kameraerkennung und Bauteilvereinzeler schnell und effizient zu automatisieren. Die Komplettlösung basiert auf der Roboterplattform horstCUBE und ist bereits mit allen Komponenten ausgestattet, die für diese Anwendung notwendig sind. Weitere Prozessschritte, wie Teile-Ausgabe, Teile-Prüfung, Teile-Sortierung oder Teile-Beschriftung können einfach und ohne großen Zeitaufwand umgesetzt werden. horstCUBE wird von fruitcore robotics auch als Einzelprodukt angeboten, denn die flexible Roboterplattform bietet die optimale Basis, um verschiedenste Anwendungen mit den Robotern von fruitcore robotics einfach und sicher zu realisieren.
Steuerung und Software wichtige Bestandteile der HORST-Systeme
Mit HORST-Systemen können ganze Anwendungen wie beispielsweise horstCUBE plug & play intuitiv und einfach gesteuert werden. Verschiedenste Komponenten wie Greifer, CNC-Anlagen oder Sicherheitssysteme werden zentral mit der Bediensoftware horstFX intelligent und stärker als in der Branche üblich vernetzt. „Roboter sind längst sehr viel mehr als nur ein Stück nützlicher Hardware“, so Jens Riegger, CEO und Mitgründer von fruitcore robotics. „Der Großteil der Wertschöpfung lässt sich über intelligente Software erzielen, Roboter werden zu Digital Robots. Jede Person, die ein Smartphone bedienen kann, ist auch in der Lage unsere HORST-Systeme über ihre Software horstFX samt digitalem Zwilling zu bedienen. Damit werden unsere Digital Robots gerade auch für den Mittelstand immer interessanter – auch, weil wir sie zu einem bezahlbaren Preis anbieten können.“
Eine neue Kategorie etabliert sich
Digital Robots vereinen modernste Robotik-Hardware mit intelligenter und intuitiver Software. Sie lassen sich einfach und ohne Vorkenntnisse mittels grafischer Bedienkonzepte einrichten und bedienen. Updates und Upgrades erhalten sie over-the-air, wodurch ihr Nutzen über die Lebensdauer ausgeweitet werden kann. Digital Robots bieten einen einfachen und schnellen Einstieg in die Automatisierung und Digitalisierung, der sich im Idealfall schnell amortisiert. Drei Aspekte zeichnen Digital Robots insbesondere aus: die intuitive Bedienung samt digitalem Zwilling, eine IIoT-Plattform, über die der digitale Zwilling des Roboters mit seiner direkten Umgebung verbunden werden kann sowie offene Schnittstellen, die eine Einbindung in Systeme erlauben, die weit über die direkte Umgebung hinaus gehen, z.B. ERP-Systeme.
Umfrage im Mittelstand: Nachfrage, Hoffnungen, Tipps fürs Management
Fast die Hälfte der deutschen Mittelständler (46 % in Betrieben mit 50-500 Mitarbeiter:innen) plant, sich Roboter ins Haus zu holen, 14 Prozent haben schon welche. Das hat eine Umfrage unter mehr als 1.000 deutschen Fach- und Führungskräften ergeben*. Die Mehrheit (66 %) sagt, dass es nun „höchste Zeit“ sei, dass auch manuelle Arbeit bei Digitalisierungsplänen priorisiert würde. Viele Fachkräfte erhoffen sich Verbesserungen im Alltag, zum Beispiel eine Verringerung der repetitiven Tätigkeiten, Qualitätsverbesserungen oder die Aussicht, weniger mit gefährlichen Substanzen arbeiten zu müssen. Fast ein Drittel sagt zudem, ihr Job würde interessanter werden (27 %) und sie würden Stolz empfinden, mit High Tech zu arbeiten (26 %). Begleitmaßnahmen der Einführung: Am wichtigsten sind den Befragten Trainings und Upskilling-Programme (34 %) sowie Mitsprache, welche Aufgaben an Roboter übergeben werden (29 %).
* Methodik
fruitcore robotics beauftragte die Marktforscher von Sapio Research mit der Befragung von Fach- und Führungskräften in Deutschland. 1005 Fach- und Führungskräfte aus Deutschland nahmen an der Umfrage teil. Die Auswahl fokussierte sich auf Fach- und Führungskräfte, die nicht vorwiegend im Büro arbeiten, sondern v.a. manuelle Arbeit verrichten oder manuelle Arbeit planen und/oder beaufsichtigen. Bei mehr als 30 Prozent der Befragten in Deutschland (322 Personen) handelt es sich um Produktionsleiter:innen. Die Umfrage wurde Anfang April 2022 durchgeführt.
Einen Blick in die »Blackbox« werfen und Künstliche Intelligenz (KI) selbst programmieren – das ermöglichen das Fraunhofer-Institut für Intelligente Analyse- und Informationssysteme IAIS, das Ministerium für Schule und Bildung des Landes Nordrhein-Westfalen, die Universität zu Köln und die InterScience-Akademie für Algorithmik. Nach der Einführung des Pflichtfachs Informatik zum Schuljahr 2021/22 in NRW hat auch KI einen festen Platz im Unterricht für die Sekundarstufe I in den Klassen 5 und 6. In dem Zuge können die Schüler*innen in NRW, aber auch darüber hinaus, auf der Fraunhofer-Programmierplattform »Open Roberta Lab« künftig Künstliche Neuronale Netze selbst programmieren und testen. Ab Sommer 2022 bietet das Fraunhofer IAIS jungen Menschen weltweit einen einmaligen Zugang zur KI.
Künstliche Intelligenz ist eines der bedeutendsten und zugleich kritischsten Zukunftsthemen. Sie findet schon heute in zahlreichen Bereichen unseres Alltags Anwendung, zum Beispiel bei Gesichtserkennung, automatischer Textergänzung, Sprachassistenten, personalisierter Werbung, Übersetzungsprogrammen und Gesundheits-Apps. Um den Schülerinnen und Schülern einen praxisnahen Einstieg in diese Thematik zu erleichtern, fördert das Ministerium für Schule und Bildung des Landes Nordrhein-Westfalen die Entwicklung von KI-Lerninhalten und Materialien im Rahmen des Projekts »KI-Algorithmen im Informatikunterricht« seit September 2021.
Mit dieser Unterstützung hat das Fraunhofer-Institut für Intelligente Analyse- und Informationssysteme IAIS erstmals Künstliche Neuronale Netze auf seiner Programmierplattform Open Roberta integriert. In dem Projekt arbeiten Fraunhofer und die Universität zu Köln zusammen, um die Schulen bei der Unterrichtsentwicklung im Bereich der KI zu unterstützen. Initiator des Projekts ist Prof. Dr. Ulrich Trottenberg, der die Projektpartner ehrenamtlich unterstützt.
Staatssekretär Mathias Richter vom Ministerium für Schule und Bildung des Landes Nordrhein-Westfalen: »Vor dem Hintergrund der rasant steigenden Bedeutung von Künstlicher Intelligenz in der Lebens- und Arbeitswelt ist es dringend geboten, möglichst früh Kompetenzen im Bereich Künstliche Intelligenz und Maschinelles Lernen aufzubauen. Wir wollen es unseren Schülerinnen und Schülern ermöglichen, ihre eigene Zukunft mitzugestalten, denn die Auswirkungen von KI machen sich zunehmend bemerkbar. Ich danke allen am Projekt Beteiligten herzlich für ihre Unterstützung zur Stärkung der informatischen Bildung in Nordrhein-Westfalen insbesondere im Bereich der KI.«
Künstliche Intelligenz erhält einen festen Platz im Informatikunterricht
KI wird oft als komplexe Technologie wahrgenommen, die nur von Fachleuten verstanden und gestaltet werden kann. Dabei können Kompetenzen in diesem Teilgebiet der Informatik schon in der Schule altersangemessen vermittelt werden. Deshalb hat seit der Einführung des Pflichtfachs Informatik in Klasse 5/6 aller weiterführenden Schulen zum Schuljahr 2021/22 in NRW auch der Bereich Künstliche Intelligenz einen festen Platz im Informatikunterricht. Hier werden unter anderem Anwendungsbeispiele von KI aus der Lebenswelt der Schülerinnen und Schüler thematisiert sowie Grundprinzipien des Maschinellen Lernens altersgerecht vermittelt.
Im Rahmen des Projekts wird die bereits weit verbreitete Open-Source-Programmierumgebung Open Roberta Lab des Fraunhofer IAIS insbesondere um die Integration Künstlicher Neuronaler Netze (KNN) erweitert, um KI-Algorithmen durch grafische Programmierung intuitiv erleb- und verstehbar zu machen. Ziel ist es, dass Schülerinnen und Schüler ab den Klassen 5 und 6 verstehen, was ein Künstliches Neuronales Netz ist, wie es funktioniert und wie sie selbst ein KNN programmieren können, welches zum Beispiel einem Roboter ermöglicht, sich selbstständig in seiner Umwelt zu bewegen. Dabei steht im Vordergrund, dass die grundlegenden Prinzipien eines KNN verstanden und selbst umgesetzt werden können.
Praxisnaher Blick in die »Blackbox«
Thorsten Leimbach, Leiter der Roberta-Initiative und des Geschäftsfelds Smart Coding and Learning am Fraunhofer IAIS: »Üblicherweise wird KI – wenn überhaupt – in der Schule als eine Art Blackbox-Anwendung behandelt. Als eines der führenden Wissenschaftsinstitute auf den Gebieten KI und Maschinelles Lernen freuen wir uns, gemeinsam mit dem Schulministerium NRW und unseren Projektpartnern einen praxisnahen Blick in diese Box zu ermöglichen. Künstliche Neuronale Netze werden zu einem begreifbaren Element, das Schülerinnen und Schüler selbst programmieren können. Sie nähern sich so den Themen Maschinelles Lernen und KI auf innovative Weise.«
Neben dem Fraunhofer IAIS ist das Institut für Mathematikdidaktik (IMD) unter Leitung von Prof. Dr. Inge Schwank am Projekt beteiligt. Das IMD widmet sich der Frage, wie die KI-Thematik für alle Schulformen aufbereitet werden kann. Weiterhin beteiligt sind das Department Mathematik/Informatik (DMI) der Universität zu Köln sowie die InterScience-Akademie für Algorithmik (ISAFA), die das Projekt initiiert hat und ehrenamtlich unterstützt.
Die KNN-Integration als Bestandteil des Open Roberta Labs soll ab Sommer 2022 für alle Schulen und Interessierte weltweit unter https://lab.open-roberta.org verfügbar sein. Lehrkräfte und weitere Messebesucher*innen können auf der didacta 2022 (am Mittwoch und Samstag) am Stand des Schulministeriums NRW bereits einen ersten Einblick erhalten.
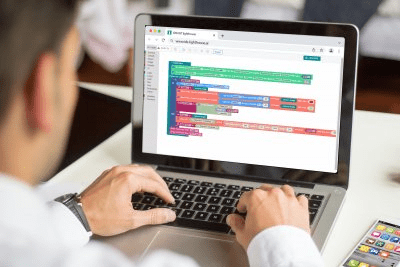
New IDS NXT software release themed „App your camera!“
The current software release 2.6 for the AI vision system IDS NXT focuses primarily on simplifying app creation. The initial phase in development is often one of the greatest challenges in the realisation of a project. With the help of the new Application Assistant in IDS NXT lighthouse, users configure a complete vision app under guidance in just a few steps, which they can then run directly on an IDS NXT camera. With the Block-based Editor, which is also new, users can configure their own program sequences with AI image processing functions, such as object recognition or classification, without any programming knowledge. Users create simple sequences in a few minutes with this visual code editor without having to know the syntax of a specific programming language.
With the Use Case Assistant, IDS supports users in creating Vision App projects. They simply select the use case that fits their project. With queries and tips, the assistant guides them through the process of creating the Vision App project and creates the code, just like in an interview. It links existing training projects with the vision app project or creates new training projects and data sets in IDS NXT lighthouse if required.
With the combinable blocks and the intuitive user interface of the Block-based Editor, anyone can realise their own projects using AI-based image processing (such as object detection or classification) as an individual vision app without having to know the syntax of a specific programming language. Using the predefined blocks of the code editor, users build their vision app graphically, including processes such as loops and conditional statements. How this works is demonstrated, for example, in the IDS Vision Channel (www.ids-vision-channel.tech). The session „Build AI vision apps without coding – xciting new easyness“ is available for viewing as a recording.
IDS NXT is a comprehensive system with a wide range of workflows and tools for realising your own AI vision applications. The intelligent IDS NXT cameras can process tasks „OnDevice“ and deliver image processing results themselves. The tasks of the cameras are determined by apps that are uploaded to the cameras and executed there. Their functionality can thus be changed at any time. This is supported by software such as IDS NXT lighthouse, with which users can not only train neural networks, but now also create their own vision apps. The system offers both beginners and professionals enormous scope for designing AI vision apps. Learn more: www.ids-nxt.com
Auf der Hannover Messe 2022 stellt igus den ersten Prototypen eines humanoiden Low Cost Roboters vor
Köln, 27. Mai 2022 – Mensch, Maschine – oder beides? Humanoide Roboter sind längst nicht mehr nur Science-Fiction, sondern Realität. Auch igusforscht bereits seit einiger Zeit an humanoider Robotik und stellt nun auf der Hannover Messe einen Prototypen des motion plastics bot vor: ein humanoider Roboter, der die Vorteile von Hochleistungskunststoffen und Low Cost Automation vereint.
Roboter sind aus unserem Alltag nicht mehr wegzudenken. Spätestens seit dem Wandel zur Industrie 4.0 werden immer mehr Aufgaben automatisiert – und davon profitieren auch neue Formen der Robotik. Doch Roboter können nicht nur in der Industrie, sondern auch im Alltag für Erleichterung sorgen. Ein Humanoid, der nicht nur funktionell, sondern auch freundlich ist und menschliche Züge trägt, kann den Menschen nicht als Maschine, sondern als Partner begleiten. In der Forschung und Entwicklung von humanoider Robotik gibt es stetig Fortschritte. Zum Beispiel bei einem Forschungsteam der TU Chemnitz, das eine E-Skin entwickelt – eine berührungsempfindliche elektronische Haut, die humanoide Roboter noch menschenähnlicher machen könnte. Immer getrieben von der Frage, in welche Richtung sich die Robotik weiterentwickeln kann, arbeitet auch igus seit einiger Zeit an der eigenen Vision eines humanoiden Roboters – dem motion plastics bot. „Mit dem igus ReBeL und unserem drytech Angebot waren bereits passende Komponenten vorhanden, um Bewegung in einen Roboter zu bringen. Der humanoide Roboter ist ein gemeinsames Projekt mit den Robotik-Experten des Stuttgarter Start-ups TruPhysics, das den intelligenten Humanoiden aus unseren motion plastics sowie weiteren Komponenten zusammengebaut hat. Dort ist er unter dem Namen Robert M3 erhältlich”, erklärt Alexander Mühlens, Leiter Geschäftsbereich Automatisierungstechnik und Robotik bei igus. „Mit dem Bot wollen wir das Zusammenspiel von unseren Produkten aus Hochleistungskunststoffen und integrierter Intelligenz aufzeigen – und das zu einem erschwinglichen Preis.“
Leichter und wartungsfreier Low Cost Humanoid
Für eine lange und störungsfreie Laufzeit ohne Wartung bieten die Tribo-Polymere von igus im motion plastics bot einen klaren Vorteil: Schmiermittelfreiheit. Gleichzeitig ermöglichen die Hochleistungskunststoffe eine leichte Bauweise. Durch ihren Einsatz bringt der motion plastics bot bei einer Höhe von bis zu 2,70 Meter lediglich 78 Kilogramm auf die Waage. Seine Spannweite beträgt 1,50 Meter. Der motion plastics bot verfügt über ein selbstfahrendes AGV (Automated Guided Vehicle), einen teleskopierbaren Körper sowie einen Kopf mit integriertem Bildschirm und Avatar für eine interaktive Kommunikation. Zentraler Bestandteil ist auch der igus ReBeL, ein Serviceroboter mit Cobot-Fähigkeiten, der als Arme des Bots zum Einsatz kommt. Das Herzstück des ReBeLs sind die vollintegrierten Tribo-Wellgetriebe aus Kunststoff mit Motor, Absolutwert-Encoder, Kraftregelung und Controller. Der motion plastics bot bewegt sich in Schrittgeschwindigkeit und verfügt über eine Traglast von 2 Kilogramm pro Arm. Angesteuert wird er als Open Source-Lösung über das Robot Operating System (ROS). Denn das gesamte Low Cost Automation-Angebot von igus lässt sich in ROS abbilden. Mit der Studie zum motion plastics bot vereint igus die Vorteile seiner Hochleistungskunststoffe für die Bewegung und sein Know-how im Bereich Low Cost Automation, um die Entwicklung der nächsten Robotergeneration weiter voranzutreiben.
Lebenslanger Begleiter statt nur Maschine
„Wir sehen viel Potenzial im Einsatz von humanoiden Robotern. Doch unsere Welt ist von Menschen für Menschen gebaut. Statt nur einzelne Automatisierungsteile zu nutzen, ist es daher sinnvoll an Humanoiden und Androiden zu forschen. Die Frage ist, wann ist der Markt soweit?“, macht Alexander Mühlens deutlich. Menschenähnliche Roboter können sowohl gefährliche als auch einfache und monotone Aufgaben übernehmen.Im beruflichen Umfeld können Arbeiten erledigt werden, die über ein bloßes Pick & Place, wie es Roboterarme verrichten, hinausgehen. Im Haushaltsbereich kann ein Bot mehrere Roboter ersetzen: Er könnte selbstständig staubsaugen, Rasen mähen, Einkäufe erledigen, kochen, Wäsche waschen und darüber hinaus alle möglichen Aufgaben erledigen – selbst die Pflege von kranken Menschen. Somit wäre er nicht nur eine Maschine, sondern ein Begleiter, der für eine Menschenleben lange Erleichterung sorgen könnte. „Der Einsatz eines solchen Roboters ist bisher noch mit hohen Kosten verbunden, berücksichtigt man jedoch die mögliche Lebensdauer, würde sich der Einsatz längerfristig amortisieren”, sagt Mühlens. „Unser Ziel ist es, mit motion plastics Komponenten kostengünstige und einfache Lösungen für humanoide Robotik aufzuzeigen.”
Waldachtal, 11.05.2022 Mit dem neuen Schulbaukasten First Coding von fischertechnik lassen sich einfache Roboterprogrammierungen durchführen. Schülerinnen und Schüler der Primarstufe eignen sich die Grundprinzipien der Robotik und Informatik an. Der Baukasten enthält umfangreiche Beschreibungen zum Thema und einfache Übungsaufgaben.
Mit dem neuen Schulbaukasten First Coding von fischertechnik lassen sich einfache Roboterprogrammierungen durchführen. Schülerinnen und Schüler der Primarstufe eignen sich die Grundprinzipien der Robotik und Informatik an. Der Baukasten enthält umfangreiche Beschreibungen zum Thema und einfache Übungsaufgaben.
Insgesamt können mit fischertechnik First Coding drei unterschiedliche Robotermodelle gebaut werden. Der Baukasten enthält alles, was voll funktionsfähige Fahrroboter benötigen: Bausteine zum Zusammenbauen, ein komplett fertig aufgebautes Chassis mit Motoren, Steuerung und Infrarotsensor sowie Taster und Batteriefach. Komplexe Verkabelungen sind nicht notwendig.
Mit seinen altersgerechten Aufgabenstellungen wertet First Coding jeden Grundschulunterricht auf und vermittelt spielerisch die Funktionsweise einfacher Programmierungen. Sind die kleinen Roboter einmal zusammengebaut, können sie zum Beispiel auf dem mitgelieferten Parcours Bahnen abfahren. Die Befehle wurden zuvor am Tablet oder im Smartphone programmiert. Die Roboter können ebenso über die fischertechnik App ferngesteuert werden oder über eine Teach-In-Funktion zuvor gespeicherte Wege befahren und lassen sich per Bluetooth mit dem Smartphone oder dem Tablet verbinden. Die Programmieroberfläche ist altersgerecht aufbereitet und entsprechend einfach zu bedienen. Es gilt dabei, einzelne Programmiersteine aneinanderzureihen und darüber den Roboter zu steuern. Soundeffekte und eine Steuerung über Geräusche runden das Konzept ab.
Umfangreiches Lehrmaterial und Erläuterungen zum Thema sowie elf verschiedene Aufgabenstellungen bilden eine komplette Basis für einen erfolgreichen Unterricht.
Gamification-Ansatz und zusätzliche Features machen Online-Konfigurator für Low-Cost-Portalroboter noch intuitiver
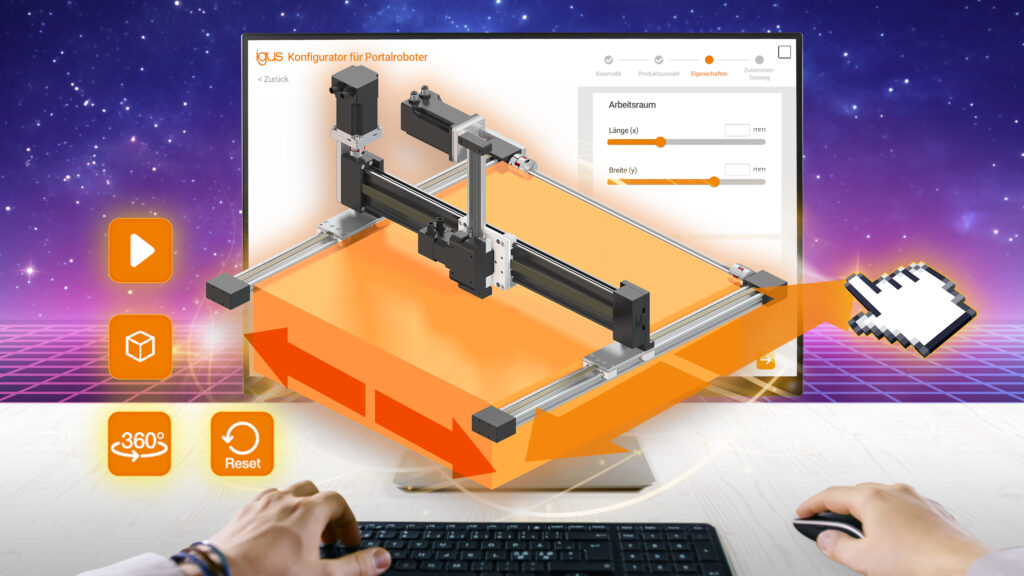
Köln, 5. Mai 2022 – Der motion plastics Spezialist igus hat seinem Online-Konfigurator für Low-Cost-Portalroboter mithilfe der Spiel-Engine Unity ein Facelift spendiert und die Bedienung dadurch noch effizienter gemacht. Ab sofort können Anwender noch schneller und leichter einen individuellen Portalroboter anschlussfertig konfigurieren – in nur 5 Minuten und mit Live-Preisauskunft. Mithilfe der Online-Tools kann jede Automatisierungslösung auch direkt im ausgewählten Arbeitsraum programmiert und getestet sowie die CAD-Daten und eine passende Zeichnung geladen werden. Selbst kleine und mittelständische Unternehmen können so barrierefrei in die Welt der Automation eintauchen – ohne Know-how von Fachkräften und CAD-Software.
Effizienz steigern, Fehler reduzieren und Kosten senken: Viele Unternehmen haben die Vorteile der Prozessautomatisierung längst erkannt. Doch die Auswahl des richtigen Roboters kann zeitintensiv sein – und Zeit ist bekanntlich Geld. Um den Einstieg in die Automatisierung noch leichter zu machen, hat igus im vergangenen Jahr einen Online-Konfigurator entwickelt. Mit wenigen Klicks können so auch Laien anschlussfertige Low-Cost-Portalroboter basierend auf gleitenden drylin Linearführungen ganz einfach konfigurieren. Linearroboter sind ohne Steuerung ab 1.000 Euro pro Stück erhältlich, mit Steuerung und Software ab circa 4.000 Euro. „Seit dem Start des Konfigurators haben wir viel positives Feedback zum Gamification-Ansatz und der intuitiven Bedienbarkeit bekommen“, sagt Alexander Mühlens, Leiter Geschäftsbereich Automatisierungstechnik und Robotik bei igus. „Nichtsdestotrotz haben wir uns gefragt: Können wir die Bedienung mit diesem Feedback weiter verbessern? Die Antwort war ein klares Ja. Daher haben wir den Konfigurator weiter optimiert und neue Funktionen hinzugefügt.“
Individuellen Roboter konfigurieren – jetzt noch leichter durch Spiele-Plattform
Für das neue Design des Konfigurators haben die igus Entwickler Unity genutzt – eine Plattform, die bei der Entwicklung von Spielen für PC und Spielekonsolen zum Einsatz kommt. Entsprechend intuitiv ist die Bedienung des Konfigurators. Und die funktioniert wie folgt: Im ersten Schritt wählt der Anwender die Kinematik, also ein Linien-, Flächen- oder Raumportal. Die Optik erinnert dabei an ein Auswahlmenü aus einem Computerspiel, über das Spieler beispielsweise Rennwagen wählen. Mit diesen Standardkonfigurationen lässt sich bei klaren Rahmenbedingungen schnell der richtige Roboter auswählen. Darüber hinaus gibt es erstmalig die Möglichkeit, ein Sonderportal zusammenzustellen und anzufragen. Ob Eismaschine, Vermessungssystem oder Palettierroboter: Viele Anwendungen müssen spezielle Sicherheitsbestimmungen erfüllen, spritzwassergeschützt sein oder arbeiten zum Beispiel in besonders kleinen Bauräumen. Der Online-Konfigurator ermöglicht Anwendern, ein Sonderportal anzufragen, das den speziellen Anforderungen ihrer ganz individuellen Anwendung gerecht wird.
3D-Modell visualisiert Bauraum und Bewegungen des Portals
Der nächste Schritt: die Konfiguration des Portals. Hier stehen Schieberegler zur Verfügung, über die sich die Hublängen der X-, Y- und Z-Achse millimetergenau einstellen lassen. Ein dynamisches 3D-Modell des Portals, das sich in alle Richtungen drehen lässt, visualisiert dabei die Einstellungen in Echtzeit. „An dieser Stelle haben wir eine neue Funktion eingefügt“, freut sich Mühlens. „Mit einem Klick ist es nun möglich, auch den Bauraum des Portals darzustellen. Hierfür nutzen wir farbige Flächen. Somit gewinnen Anwender einen visuellen Eindruck davon, wie viel Platz ihre Automationslösung beansprucht.“ Um auch Transparenz in Sachen Kosten zu gewährleisten, erhalten Nutzer zudem eine Live-Anzeige des Preises ihrer Automationslösung. Fortgeschrittene Nutzer können das 3D-Modell auch als STEP-Datei exportieren und in einem beliebigen CAD-Programm weiterverarbeiten. Mit dem Online-Konfigurator ist es sogar möglich, Bewegungen des Roboters festzulegen – über die Eingabe weniger Parameter und ohne Programmier-Kenntnisse. „Wir folgen mit dieser Funktion dem Motto ‚Test before invest’. Bediener gewinnen dank des beweglichen 3D-Modells ein Gefühl für Roboterbewegungen und Taktzeiten“, so Mühlens. Nach der Online-Programmierung kann die Datei über eine App in Virtual Reality dargestellt oder in die echte Roboter-Steuerung geladen werden.
Online bestellt: Kurze Zeit später steht der Roboter vor der Tür
Sind Bediener mit der Konfiguration des Portals zufrieden, folgen die nächsten Schritte: Sie wählen eine passende Steuerung, die das Portal zu einer anschlussfertigen Low-Cost-Robotic Lösung komplettiert – ob ready-to-use mit igus robot control oder die Do-it-yourself Variante mit dryve D1-Steuerungskit. Kurze Zeit nach der Online-Bestellung steht die Automationslösung dann vor der Tür. Vormontierte Portale in Standardgrößen sind sogar innerhalb von 24 Stunden versandfertig. Ein weiteres Plus: Alle konfigurierbaren Portalsysteme sind durch die selbstschmierenden igus Polymere in allen Lagerstellen 100 Prozent wartungsfrei und sauber. Und zusätzliche Komponenten wie Greifer, Vision-Systeme, Motoren und Sensoren erhalten Automations-Novizen über den Low-Cost-Automation Marktplatz RBTX.