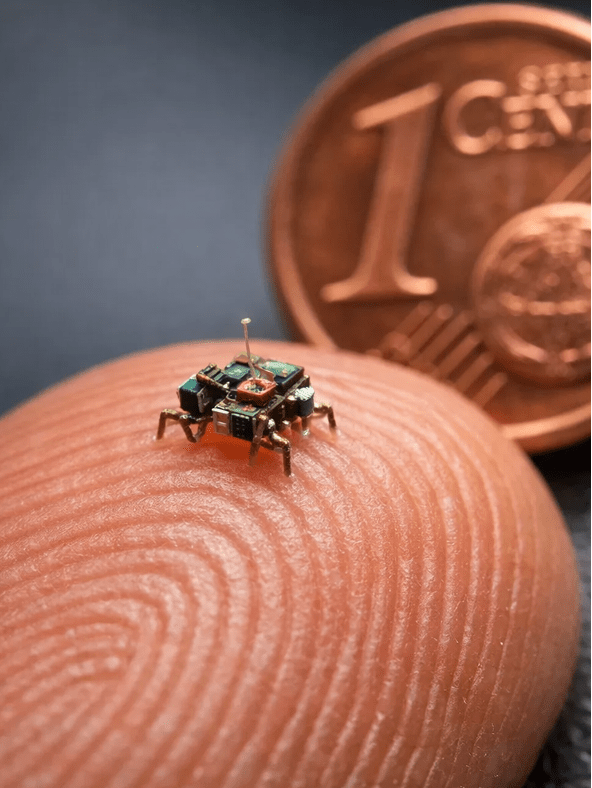
Stell dir vor, ein Roboter ist so klein, dass er fast auf die Spitze eines Bleistifts passt – und trotzdem ganz allein denken und handeln kann. Klingt wie Science-Fiction? Forschende haben genau das geschafft! In einem aktuellen Bericht von heise online geht es um den kleinsten programmierbaren autonomen Roboter der Welt. Lass uns gemeinsam entdecken, was dieses Mini-Wunder kann – und warum es so spannend für die Zukunft ist.
Was bedeutet „programmierbar“ und „autonom“?
Bevor wir zum Roboter selbst kommen, klären wir kurz zwei wichtige Begriffe:
Programmierbar heißt: Menschen können dem Roboter sagen, was er tun soll – zum Beispiel laufen, stoppen oder einem Licht folgen.
Autonom bedeutet: Der Roboter entscheidet selbst, wann er was tut. Er braucht keine Fernsteuerung.
Und jetzt kommt das Erstaunliche: Dieser Roboter kann beides – obwohl er nur wenige Millimeter groß ist!
Der neue Roboter ist kaum größer als ein Staubkorn im Vergleich zu normalen Maschinen. Er ist so winzig, dass man ihn nur mit sehr ruhiger Hand oder unter dem Mikroskop genau anschauen kann. Trotzdem stecken in ihm eine winzige Elektronik. Sensoren, mit denen er seine Umgebung wahrnimmt und ein Antrieb, der ihn bewegen kann.
Das Team hinter dem Projekt arbeitet an der Northwestern University in den USA. Dort wird schon lange an extrem kleinen Robotern geforscht.
Was kann der Mini-Roboter?
Obwohl er so klein ist, kann der Roboter:
sich selbstständig bewegen
programmierten Befehlen folgen
auf seine Umgebung reagieren
Das ist etwas ganz Besonderes, denn bisher waren so kleine Roboter oft nur einfache Maschinen ohne „eigenes Denken“.
Wofür braucht man so winzige Roboter?
Jetzt wird es richtig spannend! Solche Mini-Roboter könnten in Zukunft in der Medizin helfen, zum Beispiel bei sehr schonenden Untersuchungen im Körper. Sie könnten in der Umweltforschung winzige Orte erkunden, die für Menschen unerreichbar sind. In der Technik könnten sie beim Bau noch kleinerer Geräte unterstützen. Einige Forschende träumen sogar davon, dass viele dieser Roboter eines Tages gemeinsam wie ein Ameisen-Schwarm arbeiten.
Fazit
Der kleinste programmierbare autonome Roboter der Welt zeigt, wie rasant sich Robotik und KI entwickeln. Obwohl er winzig ist, steckt in ihm jede Menge Technik und Zukunft. Vielleicht sind es genau solche Mini-Helfer, die eines Tages große Probleme lösen – leise, unsichtbar und unglaublich schlau.
FunFact
Wusstest du, dass… manche Mini-Roboter ihre Bewegung von Insekten wie Käfern oder Grillen abgeschaut haben? Die Natur ist oft die beste Ingenieur:in!
Wenn du noch mehr über Roboter und künstliche Intelligenz erfahren möchtest, schau dir das Buch „Roboter & KI” aus der SchlauFUX-Reihe des Kosmos Verlags an. Der Autor beschreibt darin viele weitere Roboter aus den unterschiedlichsten Anwendungsgebieten: Manche fliegen zum Mars, andere tauchen in den tiefsten Gewässern der Erde und wieder andere arbeiten in Fabriken ganz ohne Licht. 👉 https://www.kosmos.de/de/kosmos-schlaufux-roboter-und-ki_1182437_9783440182437
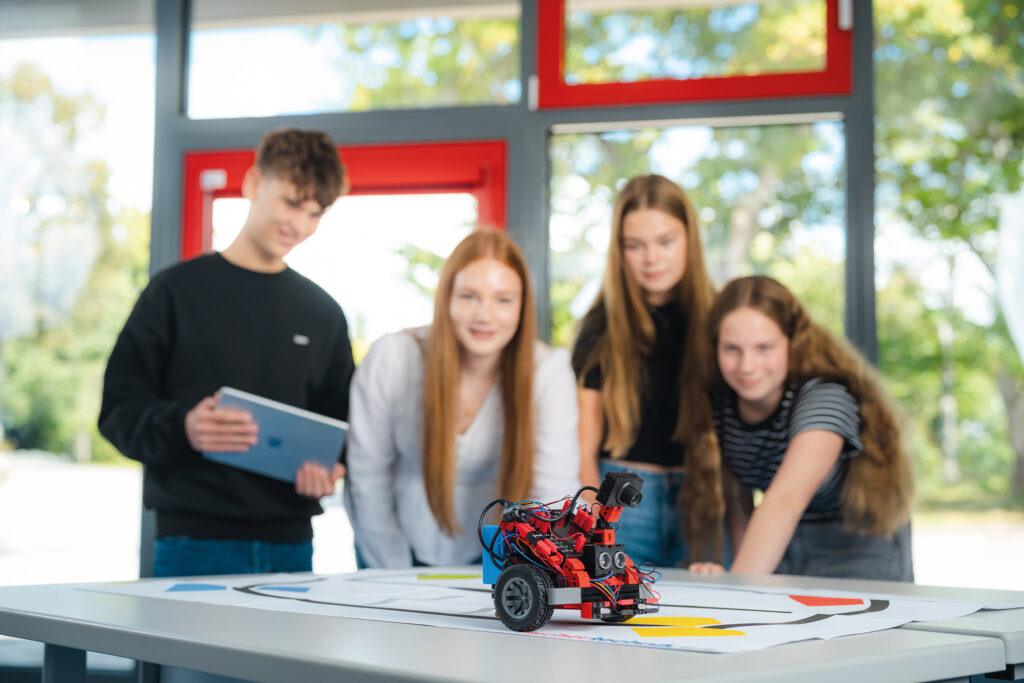
fischertechnik setzt einen weiteren Meilenstein in der technischen Bildung. Mit dem neuen Lernkonzept STEM Coding Ultimate AI wird es erstmals möglich, ein neuronales Netzwerk selbst zu trainieren und dessen Funktionsweise von Grund auf zu verstehen. Damit vermittelt fischertechnik jungen Menschen die Programmier- und KI-Kompetenzen der Zukunft – direkt im Klassenzimmer und ohne Cloud-Anbindung.
Der Baukasten STEM Coding Ultimate AI richtet sich an weiterführende Schulen und vermittelt handlungsorientiert die Grundlagen von maschinellem Lernen und KI-gestützter Robotik. Anhand von zwölf vielseitigen, zum Teil erweiterbaren Modellen setzen sich Schülerinnen und Schüler der Sekundarstufe II mit zentralen Fragestellungen der Informationstechnik und der Künstlichen Intelligenz auseinander. Ausgehend von realitätsnahen Szenarien entwickeln sie eigenständig Lösungen für komplexe, problemorientierte Aufgabenstellungen. Ein leistungsstarker Controller, moderne Sensoren und Aktoren, eine benutzerfreundliche App sowie die bewährten fischertechnik Bausteine ermöglichen einen praxisnahen Zugang zu fortgeschrittenen Technologien.
Erste Trainingsschritte lassen sich unmittelbar grafisch darstellen, sodass Lernende den Fortschritt nachvollziehen können. Anschließend können die trainierten Daten per Bluetooth oder über einen WLAN- oder USB-Anschluss an Roboter übertragen werden, die das Gelernte in realen Anwendungen sichtbar machen – beispielsweise nach dem Prinzip eines autonomen Fahrzeugs. Damit wird abstraktes Wissen greifbar, und aus Theorie entsteht erlebbare Praxis.
Lehrkräfte erhalten über didaktisches Begleitmaterial einen leichten Einstieg ins Thema.
Besonders wertvoll ist dieser Ansatz, weil er die sogenannten Future Skills wie projektorientiertes Arbeiten und Teamfähigkeit fördert, die in einer zunehmend digitalisierten Arbeitswelt unverzichtbar sind. Der Umgang mit Künstlicher Intelligenz, das Verständnis neuronaler Netze und die Fähigkeit, Daten eigenständig zu erfassen, zu analysieren und nutzbar zu machen, gehören zu den Schlüsselkompetenzen der kommenden Generation. Schülerinnen und Schüler lernen nicht nur die technischen Grundlagen, sondern entwickeln auch ein tiefes Verständnis dafür, wie KI Entscheidungen trifft. Sie erwerben Grundkenntnisse der neuronalen Netze und KI-Programmierung – ein Wissen, das weit über den schulischen Kontext hinaus Bedeutung hat. Darüber hinaus bauen die Schülerinnen und Schüler ihre Kenntnisse in Informatik und Robotik aus und lernen, die Funktionsweise von Aktoren und Sensoren zu verstehen.
Die Integration von Robo Pro Coding und der fischertechnik STEM Suite ermöglicht einen sanften Einstieg mit Blockly-Programmierung und zugleich den direkten Einblick in professionelle Programmiersprachen wie Python. Der neue Baukasten arbeitet lokal auf dem TXT 4.0 Controller – ganz ohne Cloud. Damit steht Schulen ein zukunftssicheres Werkzeug zur Verfügung, das über Jahre hinweg eingesetzt werden kann.
„Gemäß unserem Motto: wo Neugier Wissen wird, schaffen wir mit unserem Lernkonzept STEM Coding Ultimate AI für Schülerinnen und Schüler die Möglichkeit, Künstliche Intelligenz nicht nur zu konsumieren, sondern aktiv zu gestalten und zu verstehen“, erklärt Martin Rogler, Geschäftsführer fischertechnik. „Denn wer frühzeitig die Grundlagen der KI erlernt, besitzt morgen einen entscheidenden Vorteil in Studium, Beruf und Gesellschaft.“
Das Jahr 2025 markiert zugleich ein besonderes Jubiläum: 60 Jahre fischertechnik. Seit sechs Jahrzehnten inspiriert das Unternehmen Generationen von Tüftlern, Ingenieurinnen und Forschern, Technik spielerisch zu entdecken und zu verstehen. Der neue STEM Coding Ultimate AI Baukasten knüpft als Nachfolger des TXT Base Sets an diese Tradition an und führt sie in die Zukunft – mit einer Innovation, die die Faszination klassischer Baukästen mit den Technologien von morgen verbindet. Im Sinne der Nachhaltigkeit ist STEM Coding Ultimate AI zudem weiterhin kompatibel mit allen verfügbaren TXT 4.0 Base Set Add-Ons für Omniwheels, Industrial Robots, AI, IoT, Competition und Autonomous Driving.
Mit diesem Schritt leistet fischertechnik einen entscheidenden Beitrag zur Förderung von Kreativität und Problemlösungskompetenz sowie für das Verständnis von Zukunftstechnologien. So entsteht ein Produkt, das nicht nur den aktuellen Bildungsbedarf deckt, sondern auch den Geist der Marke seit 60 Jahren weiterträgt: Technik zum Anfassen, Verstehen und Gestalten.
3D-gedruckter Roboter wird einfacher, smarter und noch flexibler
Nürnberg, 11.11.2025 +++ Die vierte Version von pib (printable intelligent bot) ist ab sofort verfügbar. Der humanoide Open Source Roboter aus dem 3D-Drucker lässt sich von jedem selbst bauen, programmieren und mit KI erweitern. Alle 3D-Druckdaten und Anleitungen stehen auf der Projekt-Website zur freien Verfügung, Unterstützung und Austausch gibt es durch die mehr als 1.800 Community-Mitglieder. Das Projekt hat bereits mehrere renommierte Auszeichnungen gewonnen, darunter den German Design Award 2025 und den German Innovation Award 2025.
pib – der Roboter aus dem 3D-Drucker
Der humanoide Roboter pib wurde von der Nürnberger isento GmbH entwickelt und richtet sich an Technik-Enthusiasten, Bildungseinrichtungen sowie Maker-Communities. Mit einem handelsüblichen 3D-Drucker lassen sich sämtliche mechanischen Komponenten herstellen. Alle STL-Dateien, Materiallisten und detaillierten Bauanleitungen stehen frei zur Verfügung.
pib kombiniert eine modulare humanoide Struktur mit Servomotoren, Sensorik und offenen Software-Komponenten. Er kann gedruckt, zusammengebaut, programmiert und individuell erweitert werden. Als Open-Source-Projekt bietet pib einen einfachen Einstieg in Robotik und KI – frei von hohen Kosten und geschlossenen Systemen. Die internationale Community treibt die kontinuierliche Weiterentwicklung voran, sodass pib ideal für Maker, Forschung und Bildung ist. Das Ziel: Robotik und KI für alle zugänglich zu machen und die Einstiegshürden nachhaltig zu senken.
Vereinfachter Aufbau dank Community-Feedback
Die neue Version ist deutlich einfacher und flexibler aufgebaut. Die Kalibrierung der Motoren wurde erleichtert, der Zugang zur Elektronik und zum Power-Button komfortabler gestaltet. Viele dieser Verbesserungen gehen direkt auf das wertvolle Feedback der aktiven Community zurück.
Neue Technik und Funktionen
pib ist nun mit einem Mikrofon-Array ausgestattet, das nicht nur die Audioqualität verbessert, sondern auch die Richtung von Geräuschen erkennt. Neue Lautsprecher sorgen für natürlichere Interaktion und setzen mit blauer Beleuchtung ein Design-Highlight. Drei programmierbare RGB-Buttons am Oberkörper ermöglichen individuelle Steuerbefehle.
Offene Robotik für alle
„Mit pib verfolgen wir die Vision, Robotik für alle zugänglich zu machen. Das neue Release zeigt, wie Open Source Innovation vorantreibt: ein humanoider Roboter, den man selbst bauen, erweitern und verstehen kann. Besonders stolz sind wir darauf, dass viele Verbesserungen direkt aus dem wertvollen Feedback unserer Community entstanden sind“, sagt Dr. Jürgen Baier, Co-Founder und CEO von pib.rocks.
Von der Werkbank ins Klassenzimmer
pib richtet sich an Maker, Robotik-Interessierte und KI-Tüftler gleichermaßen. Darüber hinaus wird der Roboter bereits in mehr als 70 Schulen und Bildungseinrichtungen eingesetzt: als fächerübergreifende Lernplattform für Zukunftsthemen wie Robotik, 3D-Druck und künstliche Intelligenz.
Weitere Infos, Baupläne und Anleitungen: www.pib.rocks
3D-printed robot becomes simpler, smarter, and even more flexible
Nuremberg, November 11, 2025 +++ The fourth version of pib (printable intelligent bot) is now available. The humanoid open-source robot can be 3D-printed, built, programmed, and enhanced with AI by anyone. All 3D printing files and assembly instructions are freely available on the project website, with support and exchange provided by a community of more than 1,800 members. The project has already received several prestigious awards, including the German Design Award 2025 and the German Innovation Award 2025.
pib – the robot from the 3D printer
The humanoid robot pib was developed by isento GmbH in Nuremberg and is aimed at tech enthusiasts, educational institutions, and maker communities. Using a standard 3D printer, all mechanical components can be produced. All STL files, material lists, and detailed assembly guides are freely available.
pib combines a modular humanoid structure with servo motors, sensors, and open software components. It can be printed, assembled, programmed, and customized. As an open-source project, pib offers an accessible entry point into robotics and AI—free from high costs and proprietary systems. The international community continuously drives its development forward, making pib ideal for makers, research, and education. The goal: to make robotics and AI accessible to everyone and to lower entry barriers sustainably.
Simplified design thanks to community feedback
The new version features a significantly simpler and more flexible design. Motor calibration has been made easier, and access to the electronics and power button is now more convenient. Many of these improvements are direct results of valuable feedback from the active community.
New technology and features
pib now includes a microphone array that not only improves audio quality but also detects the direction of sound. New speakers provide a more natural interaction experience and feature blue accent lighting as a design highlight. Three programmable RGB buttons on the torso allow for customizable control commands.
Open robotics for everyone
“With pib, we pursue the vision of making robotics accessible to everyone. The new release demonstrates how open source drives innovation: a humanoid robot that anyone can build, extend, and understand. We’re especially proud that many improvements came directly from our community’s valuable feedback,” says Dr. Jürgen Baier, Co-Founder and CEO of pib.rocks.
From the workbench to the classroom
pib appeals equally to makers, robotics enthusiasts, and AI tinkerers. Beyond that, the robot is already being used in more than 70 schools and educational institutions—as a cross-disciplinary learning platform for future-focused topics such as robotics, 3D printing, and artificial intelligence.
More information, building plans, and guides: www.pib.rocks
Am Samstag, 11. Oktober 2025 verwandelt sich die Kunsthalle Montez in Frankfurt – direkt am Main wieder in ein buntes Technik-Festival für die ganze Familie. Von 9:00 bis 20:00 Uhr gibt es Roboter, Drohnen, blinkende Spiele und 3D-Druck zum Anfassen – ein Tag voller Experimente und Ideen und ein Jubiläum für die Community, die es seit 2015 gibt.
Willkommen bei Tiago++
Schon am Eingang begrüßt dich Tiago++, ein sprechender Serviceroboter der Hochschule Darmstadt. Er zeigt, wie Roboter heute schon mit Menschen interagieren können – ein Vorgeschmack auf den ganzen Tag.
Vormittags: Selber bauen
Ab 10 Uhr heißt es: Schrauben, basteln und ausprobieren. Hier entstehen oft die schrägsten und lustigsten Ideen – und genau das ist gewollt.
Im Workshop mit Michael Ibsen kannst du aus alten Teilen oder einem Roboter-Bausatz deinen eigenen Bot zusammenbauen.
Du kannst auch eigenes Spielzeug mitbringen und es gemeinsam mit anderen für das Robo-Sumo fit machen!
Mit den VARIOBOTs lernen Kinder ab 8 Jahren spielerisch, wie Roboter sich bewegen – ganz ohne Programmieren.
👉 Eine begrenzte Anzahl von Bausätzen kann man sich für sein Team jetzt vorab sichern.
Rundgang: Technik entdecken
Beim Rundgang durch die drei Hallen findest du viel Kunst an den Wänden. Dazwischen warten spannende Mitmach-Stationen:
Steuere eine Drohne – oder bring deine eigene mit.
Komm aufs große Drohnen-Gruppenbild.
Teste blinkende LED-Spiele.
Sieh zu, wie ein 3D-Drucker Objekte Schicht für Schicht aufbaut.
Die Atmosphäre ist locker und lebendig – Familien, Studierende und Bastelfans kommen hier zusammen.
Höhepunkt: Robo-Sumo Hebocon um 18 Uhr
Am Abend steigt das große Roboter-Sumo, auch **Hebocon**⁴ genannt – ein Wettkampf, bei dem selbstgebaute Roboter gegeneinander antreten. Doch hier geht es nicht um High-Tech, sondern um Spaß:
👉 Die Regeln:
Jeder Roboter darf mitmachen, solange er sich bewegt.
Max. 50 × 50 cm groß, unter 1 kg schwer.
Keine Waffen – es bleibt familienfreundlich.
Manche Bots rollen elegant in den Ring, andere taumeln sofort wieder heraus – und genau das sorgt für die Lacher im Publikum.
Mach mit – bau deinen eigenen Roboter!
Ob Einsteiger oder Bastelprofi – jeder kann mitmachen. Hol dir jetzt den Roboter-Bausatz im Shop und probiere aus, welcher Hebocon-Typ du bist:
Shogun, Samurai, Ninja, Dragon oder doch Novize?
Egal wie dein Bot am Ende aussieht: Beim Hebocon zählt der Spaß mehr als die Technik
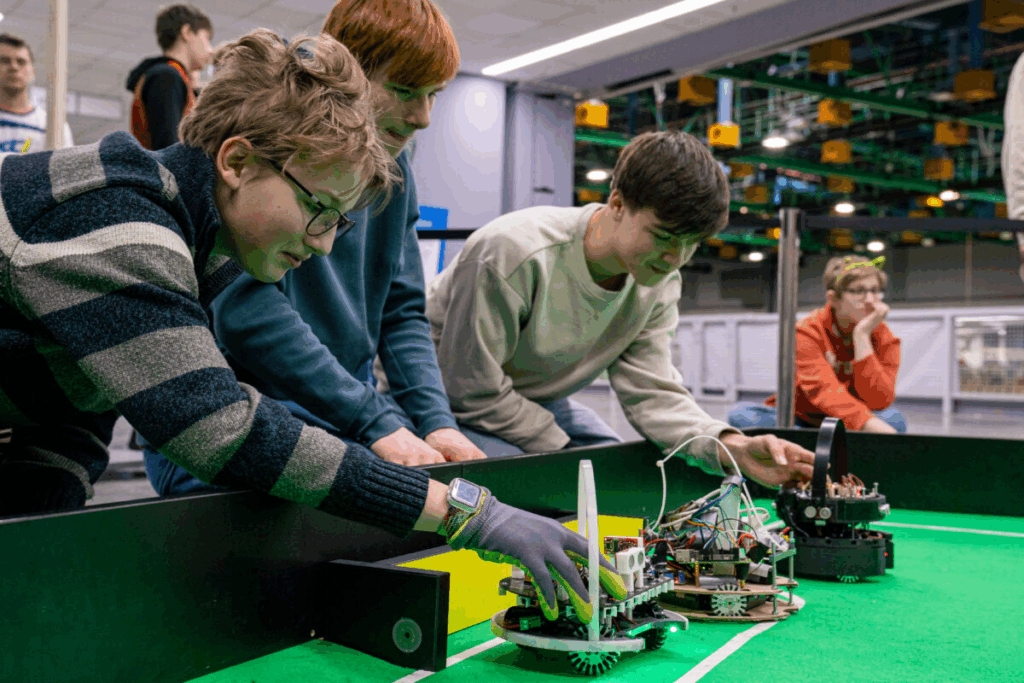
Die RoboCup Weltmeisterschaft 2027 findet im Juni in Deutschland statt: Mit Nürnberg wurde zum Abschluss des RoboCup 2025 in Brasilien offiziell der Austragungsort für den weltweit renommiertesten Wettbewerb für intelligente Robotik bekanntgegeben. Damit holt Deutschland die internationale Robotik-Elite erstmals seit 2016 wieder ins eigene Land – und setzt ein starkes Zeichen für seine technologische Zukunftsfähigkeit.
Der RoboCup gilt als globaler Leuchtturm für Forschung und Entwicklung in Robotik und Künstlicher Intelligenz (KI). Jährlich messen sich hier die besten Teams aus Universitäten, Hochschulen für Angewandte Wissenschaften und Schulen in realitätsnahen Szenarien – von Fußball über Haushaltsrobotik bis zu Rettungs- und Industrieanwendungen. Deutschland gehört seit Jahren zur Weltspitze und ist nun wieder Gastgeber dieses einzigartigen Innovationswettbewerbs.
Strategische Bedeutung für den Standort Deutschland „Zentral für den Erfolg der Vergabe des RoboCup 2027 nach Nürnberg war die Unterstützung des Bundesministeriums für Forschung, Technologie und Raumfahrt, des Freistaats Bayern, der Stadt Nürnberg, des Robotics Institute Germany, der NEURA Robotics, der AFAG Messen und Ausstellungen GmbH, der Hans und Ria Messer Stiftung und nicht zuletzt des deutschen RoboCup-Komitees. Mit der Vergabe wird Deutschlands Rolle als international sichtbarer Impulsgeber für KI-basierte Robotik gestärkt“, erklärt Prof. Dr. Oskar von Stryk, Technische Universität Darmstadt, Co-Chair des RoboCup 2027. „Gerade vor dem Hintergrund des Fachkräftemangels und der demografischen Entwicklung brauchen wir innovative Technologien, die körperlich fordernde Arbeit intelligent unterstützen und zugleich dazu beitragen, Menschen in jeder Lebenslage ein selbstbestimmtes und unabhängiges Leben zu ermöglichen.“, ergänzt Dr. Maike Paetzel-Prüsmann, Johannes Gutenberg-Universität Mainz, Co-Chair des RoboCup 2027.
KI-basierte Robotik – sogenannte verkörperte Künstliche Intelligenz – ist entscheidend, um auch künftig Wohlstand, Wettbewerbsfähigkeit und Versorgungssicherheit zu garantieren. Der RoboCup beschleunigt die Entwicklung solcher Systeme, indem er Forschenden und Nachwuchstalenten eine reale Test- und Vergleichsplattform bietet – und Begeisterung für Technik und Innovation weckt.
Nachwuchsförderung und Gründergeist Die RoboCup-Weltmeisterschaft ist mehr als ein Technologiewettbewerb – sie ist Talentschmiede, Bildungsplattform und Sprungbrett für Start-ups. In den Junior-Ligen sammeln Schülerinnen und Schüler erste Erfahrungen mit Informatik und Mechatronik, in den Major-Ligen entwickeln Studierende und Promovierende komplexe autonome Systeme auf höchstem Niveau. Viele starten danach erfolgreiche Karrieren in Unternehmen oder gründen eigene technologiegetriebene Start-ups.
„Der RoboCup verbindet Hightech mit Bildung, Wissenschaft mit Praxis, internationalen Austausch mit regionaler Innovationskraft“, so Prof. Dr. Stefan May, Technische Hochschule Nürnberg Georg Simon Ohm, Local Chair des RoboCup 2027. „Nürnberg bietet dafür das ideale Umfeld – zentral gelegen, technologisch und wirtschaftlich stark vernetzt und mit einer lebendigen Wissenschafts- und Gründerszene.“
2027: Ein Meilenstein für Deutschland im Technologie-Wettlauf Mit Blick auf den internationalen Wettlauf um technologische Souveränität setzt die RoboCup-Weltmeisterschaft 2027 ein wichtiges Signal. Deutschland braucht hochqualifizierte Köpfe und starke Innovationsökosysteme, um langfristig unabhängig und wettbewerbsfähig zu bleiben. Der RoboCup leistet dazu einen entscheidenden Beitrag.
Dorothee Bär, Bundesministerin für Forschung, Technologie und Raumfahrt: „In der Verbindung von KI und Robotik steckt ein riesiges Potential für Deutschland und Europa. Deshalb haben wir uns in der Bundesregierung die Förderung dieser Schlüsseltechnologien in der Hightech Agenda Deutschland zum Ziel gesetzt. Mit dem bereits vom Bundesforschungsministerium geförderten Robotics Institute Germany und dessen Verbindung zum RoboCup unterstützen wir gezielt Spitzenforschung und Talente für die KI-basierte Robotik. Bereits 2024 und 2025 haben wir die RoboCup German Open daher auch finanziell gefördert. Und wir haben auch die Bewerbung für die Weltmeisterschaft unterstützt. Ich freue mich sehr, dass wir den RoboCup 2027 in Deutschland willkommen heißen.“
Dr. Markus Söder, Ministerpräsident des Freistaates Bayern: „Bayern ist bei Kl und Robotik einer der führenden Standorte Europas. Mit unserer Hightech Agenda investieren wir insgesamt sechs Milliarden Euro in Wissenschaft und Forschung. Damit soll etwa im ganzen Land ein einzigartiges Ökosystem für Künstliche Intelligenz wachsen. Das „Munich Center for Machine Learning“ und das „Munich Institute of Robotics and Machine Intelligence“ stehen für Künstliche Intelligenz von Weltrang – und in Nürnberg gründen wir mit der Technischen Universität UTN die erste rein auf Kl spezialisierte Universität in Deutschland. Die Staatsregierung freut sich auf die Austragung der RoboCup-Weltmeisterschaft 2027 in Nürnberg. Wir spielen in der Hightech-Champions-League – daher ist Bayern der perfekte Ort für den RoboCup!“.
Dr. Fabian Mehring, Bayerischer Staatsminister für Digitales: „Nürnberg ist unser bayerischer Leuchtturm für Robotik und Künstliche Intelligenz – mit der ersten eigenständigen KI-Universität Deutschlands und zahlreichen innovativen Forschungseinrichtungen. Die Stadt verfügt über eine starke Infrastruktur für internationale Veranstaltungen und engagiert sich aktiv für den wissenschaftlichen Nachwuchs. Ziel ist es, junge Talente zu begeistern und globale Netzwerke in Robotik und KI zu stärken. Ich freue mich darauf, die Teilnehmenden in Nürnberg willkommen zu heißen – für eine innovative Zukunft, die wir proaktiv und gemeinsam gestalten wollen.“
Prof. Dr. Tamim Asfour, Karlsruhe Institut für Technologie, Sprecher des Robotics Institute Germany (RIG): „Das RIG hat die Bewerbung Deutschlands für den RoboCup 2027 mit großem Nachdruck unterstützt. Als bundesweite Plattform führender Robotik- und KI-Institutionen – gefördert vom Bundesministerium für Forschung, Technologie und Raumfahrt – verbindet RIG Spitzenforschung, Talente und Wirtschaft, um bahnbrechende Innovationen voranzutreiben. Wettbewerbe wie der RoboCup sind starke Impulsgeber für Fortschritt und internationale Zusammenarbeit. Nach dem erfolgreichen Auftakt der German Robotics Conference gemeinsam mit den RoboCup German Open 2025 freuen wir uns darauf, die globale Robotik-Community in Deutschland für das größte Robotik- und KI-Event Europas in 2027 willkommen zu heißen.“
Prof. Dr. Angela Schoellig, TU München, Koordinatorin des Robotics Instituts Germany: „RoboCup und das Robotics Institute Germany teilen eine inspirierende Vision: Gemeinsam treiben wir bahnbrechende Innovationen in Robotik und Künstlicher Intelligenz voran – für eine nachhaltige Zukunft in Deutschland und weltweit. Mit der RoboCup-Weltmeisterschaft 2027 holen wir die klügsten jungen Köpfe aus aller Welt nach Deutschland. Wir sind begeistert, dieses einzigartige Event als Robotics Institute Germany mitzugestalten und zu unterstützen!“
David Reger, CEO und Gründer NEURA Robotics: „Wir entwickeln kognitive Roboter, die sehen, hören, fühlen und ganz natürlich mit Menschen und ihrer Umgebung interagieren. Beim Besuch der RoboCup German Open 2025 hat mich beeindruckt, wie Menschen verschiedener Generationen gemeinsam Roboter intelligente Aufgaben lösen lassen. Als größte Volkswirtschaft Europas ist Deutschland führend in den Bereichen Robotik und Automatisierung – mit einer starken Forschungsbasis. Damit ist hier der richtige Ort, um den RoboCup 2027 auszurichten.“
Über den RoboCup und das deutsche RoboCup-Komitee Der 1997 gegründete RoboCup ist mit Teams aus mehr als 50 Nationen der weltweit älteste und größte Wettbewerb für intelligente Robotersysteme. Ziel ist es, technologische Entwicklungen in Robotik und KI durch reale Anwendungsszenarien voranzutreiben. Die Teilnehmenden entwickeln intelligente kollaborative robotische Systeme, die komplexe Aufgaben eigenständig bewältigen – unter Wettbewerbsbedingungen, die Innovation, Kreativität und Teamarbeit fordern.
Deutsche Wissenschaftlerinnen und Wissenschaftler haben die Entwicklung des RoboCups wesentlich mitgeprägt. Die deutschen Teams sind im RoboCup-Komitee Deutschland organisiert und haben die Bewerbung mit großem Engagement unterstützt und werden auch bei der Ausrichtung der Weltmeisterschaft eine tragende Rolle spielen. Sämtliche Mitglieder übernehmen zentrale Aufgaben in der Organisation und bringen ihre Expertise aktiv ein. Die Vorfreude ist spürbar – nicht nur das deutsche RoboCup-Komitee, sondern der gesamte RoboCup Deutschland blickt mit großer Erwartung darauf, die internationale RoboCup-Gemeinschaft 2027 wieder in Deutschland begrüßen zu dürfen.
Georg-Simon-Ohm-Berufskolleg setzt auf ReBeL Cobots und Education Kits von igus, um Schülern einen einfachen Einstieg in die Roboter-Programmierung zu ermöglichen
Köln, 17. Juni 2025 – Junge Menschen für Technik begeistern: Dieses Ziel verfolgt der Kunststoffspezialist und Robotikhersteller igus mit seinen Bildungsangeboten speziell für Schulen, Hochschulen und Universitäten. Dazu zählt auch das ReBeL Education Kit: Ein Lernpaket, das Schülern und Studierenden den spielerischen Einstieg in die Robotik mithilfe des ReBeL Cobots ermöglichen soll. Zum Einsatz kommen die Education Kits unter anderem am Georg-Simon-Ohm-Berufskolleg in Köln. So bekommen die Schüler die Möglichkeit, erste Programmierkenntnisse zu erwerben und praxisnahe Anwendungen zu erproben.
Von Elektrotechnik über Datenbankwissen bis hin zur Softwareentwicklung: Die Ausbildung zum Informationstechnischen Assistenten am Georg-Simon-Ohm-Berufskolleg in Köln umfasst ein vielseitiges Lehrprogramm. Dazu gehört auch das Programmieren von Robotern, um den Schülern besondere Qualifikationen in der Automatisierungstechnik zu vermitteln. „Für unsere Robotik-Klasse kamen bisher humanoide Robotiksysteme zum Einsatz, die jedoch mit der Zeit störungsanfällig geworden sind“, erklärt Kevin Meyer, Lehrer für Elektrotechnik und Robotik am Georg-Simon-Ohm-Berufskolleg. „Daher brauchten wir Ersatz für die alten Systeme und haben uns gezielt auf die Suche nach Roboterarmen gemacht, die einfach zu bedienen sind und realitätsnahe Anwendungsszenarien ermöglichen.“ Fündig wurde das Berufskolleg schließlich beim Kölner Kunststoffspezialisten igus.
igus LCA
Programmieren lernen mit realitätsnahen Anwendungsbeispielen
„igus war uns bereits für seine Energieketten bekannt, doch bei unserer Suche sind wir dann auch auf das Low-Cost-Automation-Angebot gestoßen und haben gleich einen Beratungstermin vor Ort ausgemacht“, erzählt Kevin Meyer. Auf der 400 Quadratmeter großen Customer Test Area können Kunden zahlreiche Automationslösungen aus der Praxis in Aktion sehen und gemeinsam mit den Robotik-Experten von igus die Machbarkeit ihrer geplanten Anwendung testen. Die Wahl fiel schließlich auf zehn ReBeL Cobots mit sechs Achsen inklusive Education Kits. „Roboter gibt es auf dem Markt zwar viele, aber die Alternativen waren für unsere Zwecke entweder zu klein oder zu teuer. Zudem war für uns auch eine leichte Bedienbarkeit wichtig.“ Der ReBeL Cobot mit einem Gewicht von nur 8,2 Kilogramm, einer Traglast von zwei Kilogramm und einer Reichweite von 664 Millimetern ist in der vollausgestatteten Plug-and-Play-Variante bereits für 4.970 Euro erhältlich. Im Education Kit enthalten sind über 100 Stunden Lernmaterial und Projektplatten, die auf eine Arbeitsfläche montiert werden. Anhand derer lassen sich unterschiedliche Szenarien mit Realitätsbezug programmieren: ob Behälter in ein Hochregal sortieren, Bauteile eines Fahrrads vom Förderband nehmen und an der entsprechenden Stelle einsetzen oder die Qualitätskontrolle am Fahrrad. Die kostenlose und lizenzfreie igus Robot Control Software ermöglicht zudem eine einfache Bedienbarkeit und erleichtert den Einstieg in die Roboterprogrammierung.
Lernende gezielt auf die moderne Arbeitswelt vorbereiten
Die ReBeL Cobots und Education Kits sind inzwischen seit einem Jahr in vier Robotik-Klassen des Berufskollegs im Einsatz. „Die meisten Schüler arbeiten sehr gerne mit den Robotern. Die Bedienung war am Anfang für manche noch eine Herausforderung, aber am Ende haben es alle geschafft“, erzählt Kevin Meyer. Die Software sei visuell sehr anschaulich und ermögliche den Schülern, schnell kleine Fortschritte zu machen. Alexander Mühlens, Leiter Geschäftsbereich Low-Cost-Automation bei igus betont: „Uns liegt die Förderung des Roboternachwuchses sehr am Herzen, daher freuen uns solche Projekte immer besonders. Mit unserem breiten Bildungsangebot möchten wir Schulen, Hochschulen und Universitäten dabei unterstützen, theoretisches Wissen praxisnah zu vermitteln und Lernende gezielt auf die moderne Arbeitswelt vorzubereiten.“
Mehr Informationen zum Robotik-Bildungsangebot von igus finden Sie hier:
The Avishkaar ABot Advanced Kit is a comprehensive DIY kit for STEM robotics and coding designed specifically for children aged 8 and up. It contains over 60 parts, including metal parts, motors, sensors, wheels, USB cables, screws, nuts, an Allen wrench, and a wrench. With these parts, children can build 10 different robots, from simple vehicles to more complex constructions The set reminded me of the mBot when I set it up, as it was also based on a sturdy metal construction. The included stickers and the tool are nice. The instructions were easy to understand and I didn’t find any errors or had any problems assembling. The app for remote control and programming must be activated with the product code and the user must be registered before using it for the first time. When deploying, e.g. in the classroom, you should have done this in advance. By the way, the 9V block battery visible in the video is not included when purchased from a dealer, but a full-fledged battery pack. I only use the 9V battery because of delivery problems. Overall, however, it is interesting that the robot makes this possible at all. I’m playing with the idea of connecting a solar cell here and operating the robot with solar energy…like a real Mars rover…
Here is more detailed information:
Easy to build programmable robots: With this kit, kids can create 10 different robots with over 60 pieces. This includes metal parts, an easily programmable brain, motors, sensors (2x light sensor, 1x touch sensor/button), wheels, USB cables, screws, nuts, an Allen key, a wrench, cables, and instructions.
Control via mobile app: The robots can be controlled via a remote control app. They can also be programmed using a visual block-based programming environment (similar to Scratch/Blockly).
Learning Objectives: With the ABot Advanced Kit, children learn robotics, programming, construction, mechanical design and problem solving.
Compatibility: The mobile app is compatible with iOS 11 or later and Android 10 or later.
Inexpensive Kit: The ABot Advanced Kit offers a sturdy metal frame to which motors and sensors can be attached. For the equivalent of about 60€, the set offers good value for money. Maybe the set will soon be available at a German retailer.
You can find a comprehensive assembly video of one of the 10 robot models here: