CHICAGO, 22. Juni 2026 /PRNewswire/ — Vention, die führende digitale Plattform für industrielle Automatisierung, und Teradyne Robotics haben heute auf der Automate 2026 eine strategische Zusammenarbeit bekannt gegeben, um die Umsetzung modularer Automatisierungslösungen weiter zu beschleunigen.
Während viele Automatisierungslösungen weiterhin durch getrennte Hard- und Softwarewelten geprägt sind, schafft die Zusammenarbeit eine durchgängige Lösung für Planung, Simulation und Umsetzung von Automatisierungsprojekten. Durch den Einsatz von Ventions bewährter Technologie erhalten Kunden von Teradyne Robotics Zugriff auf eine sofort einsatzbereite digitale Entwicklungsumgebung. Dadurch lassen sich Reichweiten, Layouts und modulare Maschinenstrukturen bereits vor dem Aufbau realitätsnah validieren.
„Diese Zusammenarbeit unterstreicht unsere Überzeugung, dass Robotik für Hersteller jeder Größe schneller, einfacher und skalierbarer werden muss“, sagt Étienne Lacroix, Chief Executive Officer von Vention. „Durch die Kombination unserer Expertise im Bereich digitaler Zwillinge mit den Fähigkeiten von Universal Robots schaffen wir einen neuen Ansatz für die Entwicklung modularer Roboterzellen. Das verkürzt den Weg zur Wertschöpfung und bietet gleichzeitig die Flexibilität, die moderne Produktionsumgebungen erfordern.“
„Für unsere Kunden besteht der eigentliche Durchbruch darin, den Weg von der ersten Idee bis zur produktionsreifen Lösung mit deutlich mehr Sicherheit zu gestalten“, sagt Justin Brown, Chief Commercial Officer von Teradyne Robotics. „Die Zusammenarbeit ermöglicht es uns, realitätsnahe Simulationen bereitzustellen, die das tatsächliche Bewegungsverhalten der Roboter präzise abbilden. Das reduziert Iterationsschleifen, beschleunigt die Validierung und verkürzt den Weg von der Planung bis zur Inbetriebnahme.“
Die nächste Stufe der digitalen Automatisierungsplanung
Aufbauend auf einer erfolgreichen mehrjährigen Zusammenarbeit geht diese neue Phase deutlich über die reine Hardware-Kompatibilität hinaus. Ziel ist eine tief integrierte digitale Benutzererfahrung, die speziell auf die Anforderungen von Anwendern kollaborativer Robotik zugeschnitten ist.
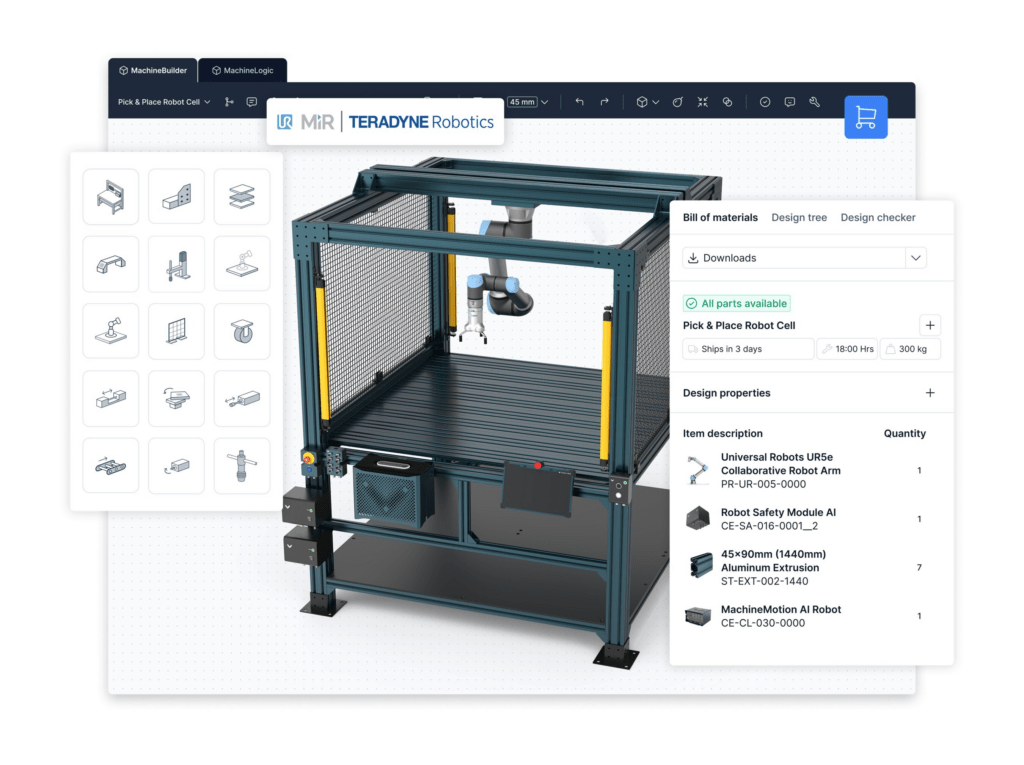
- Für Universal Robots optimierte Entwicklungsumgebung: Eine speziell entwickelte Benutzeroberfläche innerhalb der Vention-Plattform enthält die technischen Spezifikationen und Leistungsdaten der gesamten UR-Cobot-Familie. Dadurch können Anwender sicherstellen, dass ihre Konzepte von Beginn an technisch umsetzbar sind.
- Exklusiver Automatisierungs-Marktplatz: Anwender erhalten Zugriff auf Ventions Ökosystem von Universal Robots validierten UR+ Komponenten – von Greifersystemen bis hin zu Linearachsen und Verfahrachsen.
- Mehr Möglichkeiten für Kunden und Vertriebsteams: Teams von Universal Robots können ihren Kunden innerhalb weniger Minuten realitätsnahe 3D-Simulationen bereitstellen. Dadurch wird die Zusammenarbeit in der Konzeptphase vereinfacht und der Weg zum Proof of Concept deutlich verkürzt.
- Bibliothek validierter Anwendungsvorlagen: Die Plattform umfasst eine Reihe vorkonfigurierter Automatisierungsvorlagen für besonders gefragte Anwendungen, darunter End-of-Line-Lösungen, Maschinenbeschickung, Pick-and-Place-Anwendungen sowie Linearachsensysteme über Kopf. Alle Vorlagen wurden speziell für den Einsatz mit UR-Cobots optimiert.
Zum Start wird die Lösung in Nordamerika und Europa eingeführt. Kunden von Universal Robots erhalten damit eine integrierte Automatisierungsplattform, die Roboterauswahl, Planung mit digitalen Zwillingen, Steuerungstechnik und modulare Maschineninfrastruktur in einem durchgängigen Workflow verbindet.