Der Kosmos Gecko-Bot ist ein Experimentierkasten für Kinder ab acht Jahren, bei dem ein kleiner, geckoähnlicher Kletterroboter aus rund 50 Teilen zusammengebaut wird. Das Set verbindet einen spielerischen Aufbau mit einfachen technischen und physikalischen Grundlagen und richtet sich an Kinder, die gern konstruieren und Funktionsweisen nachvollziehen.
Beim Aufbau zeigt sich, dass der Bausatz die Verbindung von Mechanik und Bionik anschaulich macht. Der Roboter wird so konstruiert, dass er mithilfe seiner Saugnapf-Füße an glatten Flächen klettern kann, etwa an Fenstern oder gefliesten Wänden. Das beiliegende Experimentierheft führt Schritt für Schritt durch den Zusammenbau und erklärt außerdem die Grundlagen von Adhäsion und der Funktionsweise von Saugnäpfen.
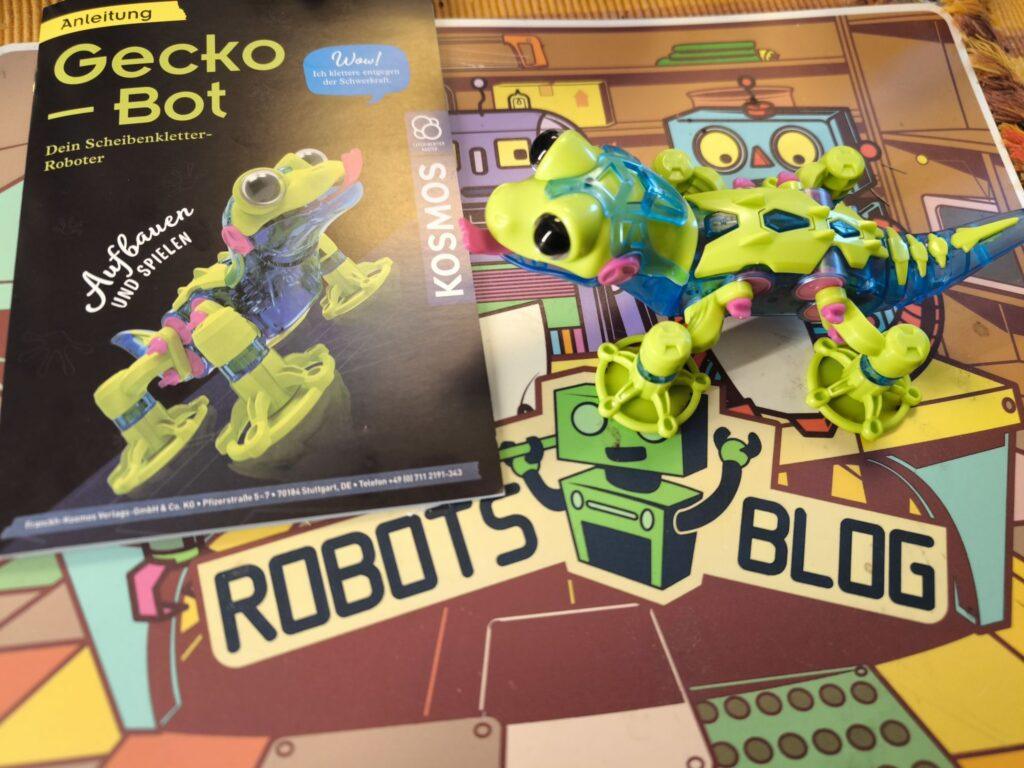
Zu den sichtbaren Merkmalen des Sets gehören die großen Knopfaugen, die bunten Bauteile und die Bewegung des Roboters beim Klettern. Diese Gestaltung sorgt dafür, dass der Gecko-Bot klar als Spiel- und Lernobjekt erkennbar ist. Die Zielsetzung des Kastens liegt weniger in komplexer Technik als in einem einfachen, gut nachvollziehbaren Lernmodell für mechanische Abläufe.
Im Praxiseindruck wird deutlich, dass der Erfolg des Modells von einem sorgfältigen Aufbau abhängt. Die Kletterfunktion funktioniert nur auf geeigneten glatten Oberflächen, und die Saugnäpfe müssen korrekt sitzen, damit der Roboter zuverlässig in Bewegung bleibt. Damit eignet sich das Set vor allem für Kinder, die ruhig und genau arbeiten, sowie für Erwachsene, die ein erklärendes Bastelprojekt suchen.
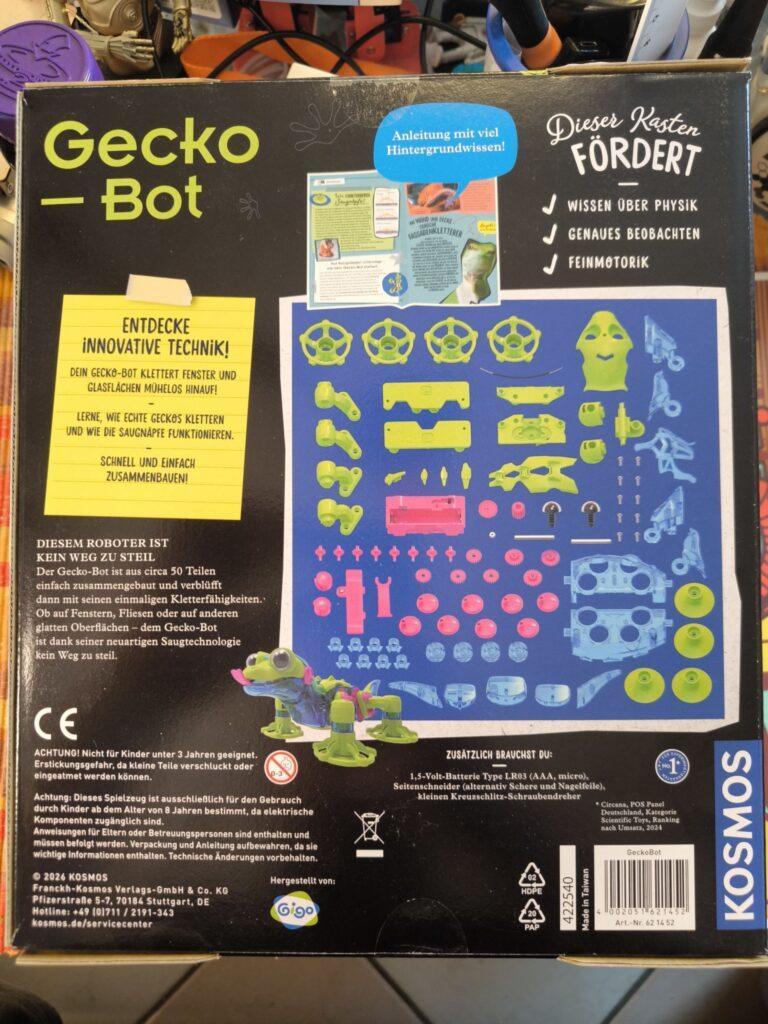
Insgesamt ist der Kosmos Gecko-Bot ein sachlich aufgebauter Experimentierkasten mit klar umrissenen Funktionen: Zusammenbauen, Bewegung beobachten und grundlegende Physik verstehen. Das Set enthält den Roboterbausatz mit Motor und Schalter, Saugnäpfe, Roboterbauteile, Zahnräder, Schrauben sowie eine farbig illustrierte Anleitung, die den Aufbau und die Funktionsweise erklärt. Ich habe für den Aufbau etwa eine Stunde benötigt und hatte keine größeren Probleme dabei.
Köln, März 2026 – Leere Fahrersitze und stehende Paletten: Die deutsche Logistik steckt in der Personalfalle. Laut Fraunhofer SCS klagen 94 Prozent der Unternehmen über fehlende Fachkräfte. Während die Suche nach qualifizierten Staplerfahrern oft Monate dauert, präsentiert der Kunststoffspezialist igus aus Köln jetzt eine Lösung: den ReBeL Pallet Mover. Ein autonomer Gabelstapler, der dort anpackt, wo das Personal fehlt.
Die Logistikbranche meldet seit einigen Jahren massive Personalengpässe. Dieser Mangel betrifft nicht nur LKW-Fahrer, sondern auch Lagerpersonal, darunter Staplerfahrer. Diese Erfahrung macht auch der Kunststoffspezialist igus. Auf über 40.000 Quadratmetern Logistikfläche am Hauptsitz in Köln stand igus vor der gleichen Hürde wie viele Mittelständler: „Wir finden schlichtweg kaum noch Mitarbeitende mit Staplerschein“, erklärt Alexander Mühlens, Leiter des Geschäftsbereichs Low-Cost-Automation. „Also haben wir die Lösung selbst gebaut.“ Der ReBeL Pallet Mover ist mehr als nur ein Transportgerät, er ist ein digitaler Teamkollege. Ausgestattet mit modernster Sensorik und intelligenter Navigation, übernimmt er repetitive und ermüdende Transportaufgaben vollautomatisch. Der ReBeL Pallet Mover navigiert selbstständig durch komplexe Hallenlayouts, nimmt Palletten auf und bringt sie an die richtige Stelle. Für die Sicherheit innerhalb der Produktion sorgen Sensoren, die Hindernisse in Echtzeit erkennen und einen reibungslosen Mischbetrieb mit Menschen ermöglichen. Mit einem Preis von gerade einmal 67.340 Euro ist der Return on Investment bereits nach 12 bis 18 Monaten erreicht.
. Sechs bis zehn Stunden im Dienst Der igus Pallet Mover ist mit 1,7 Metern Länge, knapp einem Meter Breite und rund zwei Metern Höhe bewusst kompakt konstruiert. Je nach Anwendung bietet igus den Gabelstapler für verschiedene Nutzlasten an: 300 kg, 1.400 kg und 1.500 kg. Mit einer Geschwindigkeit von bis zu 5,4 km/h kann er bis zu sechs (Pallet Mover 300) bzw. zehn Stunden (Pallet Mover 1400/1500) lang vollkommen eigenständig seinen Aufgaben nachgehen. Möglich macht dies eine 1.104-Wh bzw. eine 4.320-Wh-Batterie. Darüber hinaus passt das Unternehmen den autonomen Helfer individuell für die Ansprüche der Kunden an. „Ein häufiges Thema ist die Ausführung der Gabelzinken. Beim ReBeL Pallet Mover ist das komplett variabel“, erklärt Alexander Mühlens. Um auch kleineren Unternehmen den Einstieg in die autonome Intralogistik zu erleichtern, hat igus den Anschaffungspreis im Vergleich zu bestehenden Lösungen deutlich reduziert. Der Pallet Mover 300 kostet 67.340 Euro. Ermöglicht wird dieser Preis durch eine Reduzierung der Komponenten, die Safety-Infrastruktur ist zentral an der Spitze des Staplers verbaut. Auch die angebrachte Leistungssensorik ist kosteneffizient integriert.
Live-Erlebnis auf der LogiMAT und den AMR Days Die Nachfrage nach autonomen Staplerlösungen und weiteren autonomen mobilen Robotern (AMR) ist groß. Dabei sieht igus die autonomen Lösungen als Ergänzung zu den menschlichen Logistikexperten. Vor der Anschaffung bietet igus einen Proof-of-Concept an. Um Unternehmen den Weg in die Automatisierung so einfach wie möglich zu machen, stellt igus den Pallet Mover nicht nur auf der LogiMAT vor, sondern lädt auch zu den hauseigenen AMR Days ein. Hier können Logistikleiter live erleben, wie der ReBeL Pallet Mover die Intralogistik entlastet und dem Fachkräftemangel proaktiv entgegenwirkt.
Im Robots-Blog Interview gibt fischertechnik Geschäftsführer Martin Rogler einen kompakten Einblick in die aktuellen Robotik-Neuheiten und zeigt, welche Funktionen, Ideen und Einsatzmöglichkeiten hinter den neuen Modellen stecken. Dabei geht es um praxisnahe Anwendungen, spannende Lern- und Tüftel-Potenziale sowie darum, wie fischertechnik Robotik für Schule, Hobby und Technikfans weiterdenkt. Das Interview liefert einen schnellen Überblick über die Highlights und macht neugierig auf die neuesten Entwicklungen rund um fischertechnik und Robotik.
Der Kosmos Bionic Robotic Arm ist ein Experimentierbaukasten, der Elemente aus Bionik und Modellbau kombiniert. Das Set richtet sich an junge technikinteressierte Menschen ab etwa zehn Jahren und verbindet Lernerfahrung mit Bastelspaß.
Konzept und Funktionsweise
Im Mittelpunkt steht ein mechanischer Roboterarm, dessen Bewegungsprinzip am echten Elefantenrüssel orientiert ist. Statt Elektromotoren kommt ein ausgeklügeltes System aus Nylonfäden zum Einsatz. Diese wirken im Modell wie künstliche Muskeln und Sehnen. So gelingt es, den Arm in viele Richtungen zu bewegen; die Bewegungen erscheinen sehr flexibel und erinnern an Science-Fiction-Konstruktionen.
Gesteuert wird der Arm über zwei Joysticks. Der eine ist für den oberen, der andere für den unteren Bereich des Arms gedacht. Zusätzlich gibt es Tasten für die Rotation der Greifklaue und das Öffnen und Schließen derselben. Die Steuerung ist komplett mechanisch und benötigt weder Elektronik noch Batterien. Die Kraft wird allein per Hand auf die Bewegungselemente übertragen.
Aufbau und Schwierigkeitsgrad
Mit Bauteilen auf über 8 Teileträgern ist der Bausatz eine echte Herausforderung. Der Aufbau läuft in mehreren Phasen: Zuerst werden Kabelschnallen vorbereitet, dann die Joysticks zusammengesteckt, später der Arm zusammengesetzt und die Fäden eingefädelt sowie gespannt. Genau dieses Einstellen der Nylonfäden ist ein kritischer Punkt, weil dadurch die reibungslose Funktion sichergestellt wird.
Die Anleitung ist umfangreich und bebildert, sodass Schritt für Schritt der Bau nachvollzogen werden kann. Wer Schwierigkeiten beim Nachbauen hat, findet im Internet ergänzende Video-Anleitungen, die besonders bei komplizierten Schritten hilfreich sind. Für den gesamten Aufbau sollte man mehrere Stunden, teils auch mehrere Tage einplanen.
Vorteile des Sets
Der Kosmos Bionic Robotic Arm vermittelt wichtige Grundlagen in den Bereichen Bionik, Robotik und Mechanik. Während des Aufbaus lernt man, wie komplexe Bewegungssysteme funktionieren und entwickelt technisches Verständnis und Geschick.
Der seilzugbasierte Antrieb des Arms ist ziemlich einzigartig. Anders als motorisierte Modelle wirkt die Bewegung hier fast organisch.
Da das System ohne Elektronik und Batterien auskommt, verursacht es keine laufenden Kosten und ist weniger anfällig für technische Ausfälle.
Der Arm bietet dank verschiedener Aufsätze und hoher Beweglichkeit viel Vielfalt beim Spielen oder Experimentieren.
Nachteile und Herausforderungen
Mit beinahe 300 Teilen könnte das Set für Jüngere oder Ungeduldige schnell zu viel werden. Geduldige Bastler profitieren, aber wer rasche Erfolge sucht, könnte frustriert sein.
Für den Aufbau werden zusätzliche Werkzeuge benötigt, etwa Kreuzschlitz-Schraubendreher, Seitenschneider oder eine Feile, die nicht im Lieferumfang enthalten sind.
Wer beim Einstellen der Nylonfäden nicht genau aufpasst, dem könnte der Arm entweder zu wenig oder zu stark spannen. Das beeinflusst die Funktion und kann mehrere Justierversuche erfordern.
Im Unterschied zu elektronischen Roboterarmen kann der mechanische Arm nur leichtere Objekte greifen. Zu schwere Gegenstände können das System beschädigen oder verstellen.
Mit der Zeit könnten sich Fäden lockern, dehnen oder reißen. Dann ist Nachjustieren oder Austauschen notwendig.
Verarbeitung
Die Kunststoffteile des Sets sind passgenau gearbeitet und machen einen stabilen Eindruck. Die Gelenke und Zahnräder lassen sich leichtgängig bewegen. Langfristig könnte der Kunststoff aber bei intensiver Nutzung abnutzen oder ein Nylonfaden reißen. Bei der Vorstellung auf der Spielwarenmessen passierte leider genau das. Ich vermute aber, dass es dafür viele Stunden intensiver Belastung benötigt.
Preis-Leistungs-Verhältnis
Das Set wird im mittleren Preisbereich für Experimentierbaukästen angeboten. Interessanterweise wird es auch unter anderen Marken günstiger verkauft, da Kosmos eine Lizenzversion vertreibt, was manche Käufer zum Preisvergleich anregt.
Zielgruppe
Empfohlen wird das Set für Kinder ab etwa zehn Jahren, wobei jüngere Baufans durchaus Unterstützung gebrauchen können. Auch für Modellbau-Fans und Sammler ist das System durch seine mechanische Funktionsweise interessant.
Fazit
Der Kosmos Bionic Robotic Arm ist ein Experimentierbaukasten mit spannendem mechanischem Konzept. Sein bionisch inspiriertes Zugseilsystem hebt sich deutlich von anderen Roboterarmen ab und bietet wertvolle technische Einblicke.
Besonders zeichnet sich der Bausatz durch seinen Lerneffekt, die robuste Bauweise und die geschmeidigen Bewegungen des fertigen Arms aus. Die hohen Anforderungen an Präzision und Geduld beim Aufbau sind für viele Nutzer eine echte Herausfoderung, können aber gerade bei Kindern zu Frust führen.
Insgesamt handelt es sich um ein solides Lernspielzeug für Bastlerinnen und Bastler, das mit Herausforderungen, aber auch mit einem faszinierenden Arbeitsprinzip belohnt. Wer Freude an Technik, Robotern, Bionik und Mechanik hat, wird viel Spaß am Kosmos Bionic Robotic Arm haben.
January, 2026 — M5Stack, a global leader in modular IoT and embedded development platforms, today launched StackChan, the first community-co-created open-source AI desktop robot, built on a proven ESP32 platform and designed to be endlessly hackable by makers worldwide.
Unlike closed, concept-driven AI robots, StackChan exposes its hardware, firmware, and interaction logic from day one — turning a playful desktop companion into a real development platform.
StackChan is now live on Kickstarter with a $65 Super Early Bird offer available for the first 72 hours.
From Community to the Globe: How StackChan Was Born
Before its official launch by M5Stack, StackChan had already existed as a community-driven project since 2021. Built on M5Stack standard controller, Core series, it began as a personal open-source project by maker Shinya Ishikawa, sustained and shaped through ongoing community contributions.
As more enthusiasts joined the project, contributors like Takao, who helped popularize the DIY kits, and Robo8080, who introduced AI capabilities, played key roles in expanding StackChan beyond its original form.
Inspired by StackChan’s expandability and creative potential, M5Stack officially brought the project to life as its first ready-to-play yet endlessly hackable desktop robot—while keeping its community-driven spirit at the core.
What Remains: Core Computing & Interaction Capabilities
As with the original version,StackChan continues to use the M5Stack flagship Core Series (CoreS3) as its main controller. CoreS3 is powered by an ESP32-S3 SoC with a 240 MHz dual-core processor, 16 MB Flash, and 8 MB PSRAM, and supports both Wi-Fi and BLE connectivity.
To enable richer interactions, the main unit integrates a 2.0-inch capacitive touch display, a 0.3 MP camera, a proximity sensor, a 9-axis IMU (accelerometer + gyroscope + magnetometer). It also includes a microSD card slot, a 1W speaker, dual microphones, and power/reset buttons. Together, these hardware components form a solid foundation for StackChan’s audio-visual interactive experiences.
What’s New: Ready-to-Play Functions Powered by Advanced Hardware
For the robot body, several advancements have been made to make it easier to get hands-on and improve the out-of-box experience. It features:
Power & connectivity: A USB-C interface for both power and data, paired with a built-in 700 mAh battery.
Movement system: 2 feedback servos supporting 360° continuous rotation on the horizontal axis and 90° vertical tilt—enabling expressive movements with real-time position feedback.
Visual feedback: 2 rows totaling 12 RGB LEDs for expressive system and interaction feedback.
Sensors & interaction: Infrared transmission and reception, a three-zone touch panel, and a full-featured NFC module enabling touch- and identity-based interactions.
On the software side, StackChan is ready-to-play for starters with no coding required. The pre-installed factory firmware delivers:
Expressive faces and motions: Preloaded with vivid facial expressions and coordinated movements that bring personality and liveliness to StackChan.
Built-in AI agent: Integrates an AI agent for natural voice-based interaction and conversational experiences.
App-based remote interaction: Supports official iOS app for video calls, remote avatar control, and real-time interaction with StackChan.
Chan-to-Chan Friends Map: Enables discovery of nearby StackChan devices, unlocking playful multi-device and social interaction scenarios.
Open for customization: While beginner-friendly by default, the firmware supports further development via Arduino and UiFlow2, making it easy to create custom applications.
100% Open-Source: Built to Be Customized and Extended
In an era filled with closed, concept-driven “AI robot” products, StackChan stands out with its open-source core. From firmware and hardware interfaces to development tools, every layer is designed to be explored, modified, and extended by users.
Beyond code, StackChan also encourages physical customization. With 3D printing and creative accessories, users can personalize their StackChan’s appearance and turn it into a unique desktop companion.
Fun with Global Community: Share, Extend, and Evolve Together
Since its birth, StackChan has grown into a vibrant global community of makers, developers, and enthusiasts. From sharing projects and source code online to hosting meetups and anniversary events offline, the community continues to expand what StackChan can be.
Owning a StackChan is not just about building a robot—it’s about being part of an open ecosystem where ideas and creativity evolve together.
StackChan is not built to its end at launch. It is built to grow—through open technology, creative experimentation, and a global community that continues to redefine what a desktop robot can be.