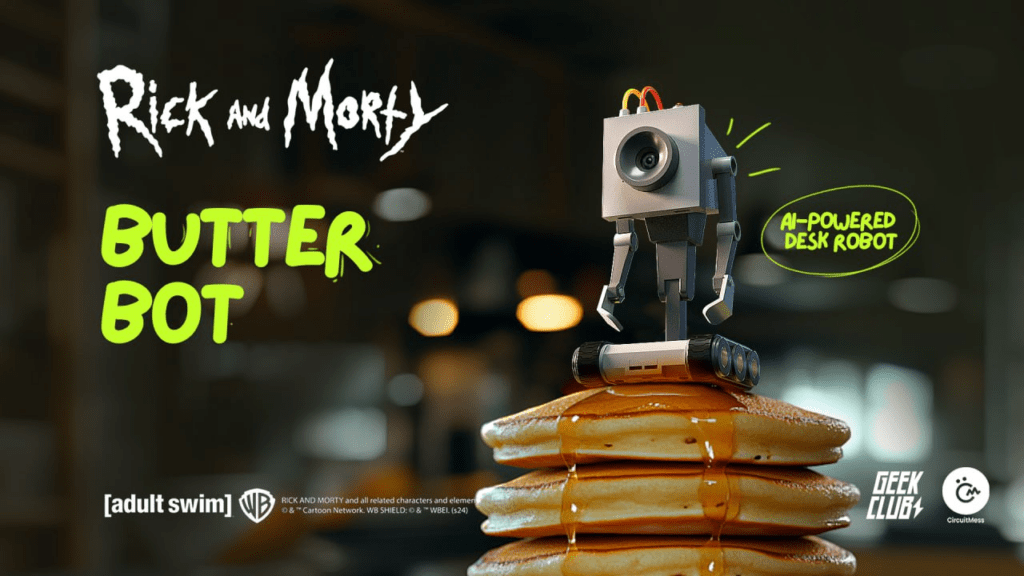
Nach einer Reihe erfolgreicher Kickstarter-Kampagnen haben sich Geek Club und CircuitMess erneut zusammengeschlossen, um ein aufregendes neues Projekt zu starten: ein AI-gesteuerter Tischroboter, der speziell für Fans von Rick und Morty entwickelt wurde.
Zagreb, Kroatien – November 2024 – Geek Club und CircuitMess freuen sich, den offiziellen Start ihrer Kickstarter-Kampagne für den Butter Bot bekannt zu geben, einen revolutionären Roboter, der von künstlicher Intelligenz gesteuert wird. Er ist inspiriert vom berühmten Roboter aus der beliebten Adult Swim-Serie Rick und Morty, der erstmals in Staffel 1, Folge 9 zu sehen war. Dieses innovative Produkt ist offiziell von Warner Bros. Discovery Global Consumer Products (WBDGCP) lizenziert, wodurch der kultige Butter Bot auf eine Weise zum Leben erweckt wird, wie es Fans noch nie zuvor gesehen haben.
Vom Bildschirm in die Realität: Eine Partnerschaft, die den Butter Bot zum Leben erweckt
Die gemeinsame Liebe zur Serie Rick und Morty unter den Teams von CircuitMess und Geek Club führte zu diesem Projekt. Beide Unternehmen erkannten die Gelegenheit, einen geliebten Charakter auf eine Weise zum Leben zu erwecken, die sowohl der Serie treu bleibt als auch technologisch innovativ ist. Sie wählten den Butter Bot aufgrund seines ikonischen Status und seines Potenzials für interaktive, lehrreiche und unterhaltsame Anwendungen. Durch die Umwandlung eines einfachen Butter-überreichenden Roboters in einen multifunktionalen AI-Begleiter wollten sie ein Produkt schaffen, das sowohl bei Fans als auch bei Technikbegeisterten Anklang findet und nahtlos Humor und Funktionalität miteinander verbindet.
Von Mars bis Multiversum: Das nächste Kapitel für CircuitMess und Geek Club
Diese Zusammenarbeit war ein logischer Schritt für beide Unternehmen nach dem großen Erfolg des vorherigen Kickstarter-Projekts – dem NASA Perseverance AI-powered Mars Rover. Beide Unternehmen erstellen lehrreiche STEM-DIY-Kits für Kinder und Erwachsene, um das Erlernen von STEM-Fähigkeiten einfacher und unterhaltsamer zu gestalten. Während sich CircuitMess hauptsächlich auf Spielzeuge konzentriert, sind die Produkte von Geek Club immer robotik- und raumfahrtthemenbezogen.
„Die Zusammenarbeit mit WBDGCP bei diesem Projekt war ein spannender nächster Schritt in unserer Partnerschaft mit CircuitMess“, sagt Nico, Mitbegründer von Geek Club, und teilt seine Begeisterung: „Der Butter Bot ist ein Beweis dafür, was passiert, wenn Kreativität, Technologie und Fan-Leidenschaft aufeinandertreffen. Wir freuen uns darauf, die Unterstützung und das Engagement der Community zu erleben, während wir unsere Kickstarter-Kampagne starten.“
Geek Club ist ein amerikanisches Unternehmen, das sich auf das Design und die Herstellung von DIY-Roboterbausätzen spezialisiert hat, die ihre Nutzer in Löten und Elektronik schulen. Ihr Fokus liegt hauptsächlich auf Raumfahrt und Robotik, mit dem Ziel, das Erlernen von Ingenieursfähigkeiten für ihr junges und erwachsenes Publikum einfach und unterhaltsam zu machen.
Mehr als Butter: Vorstellung des AI-gesteuerten Butter Bot
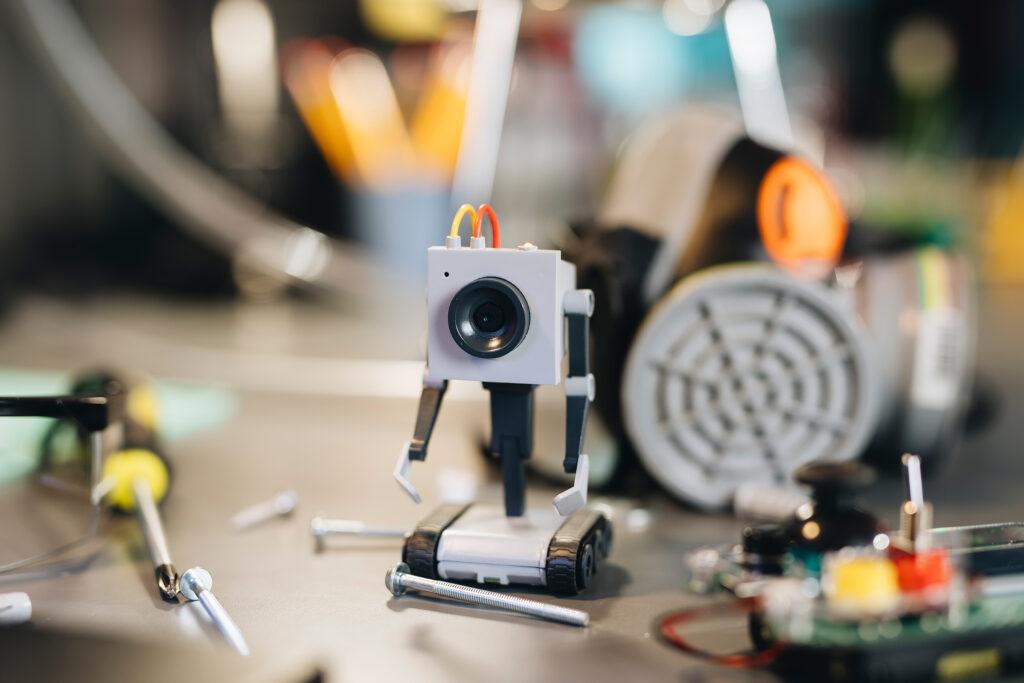
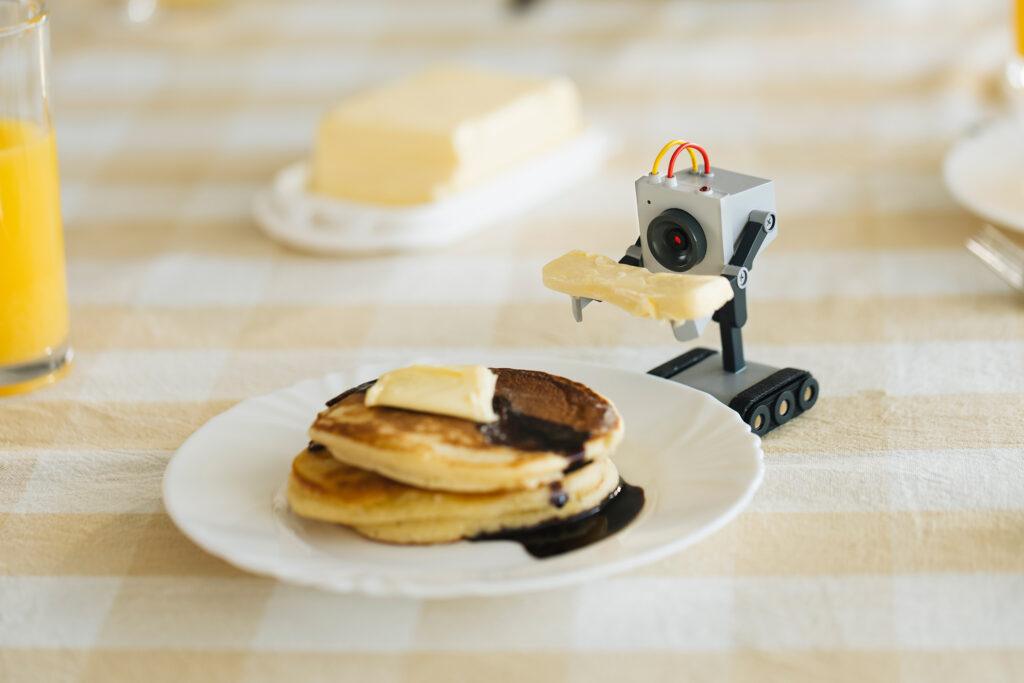
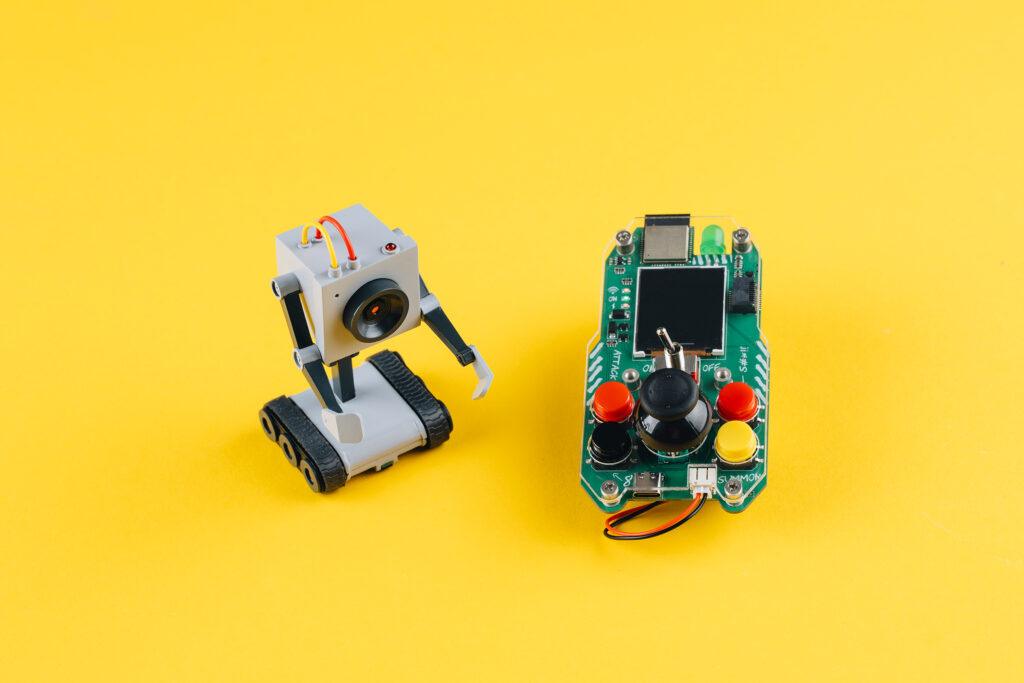
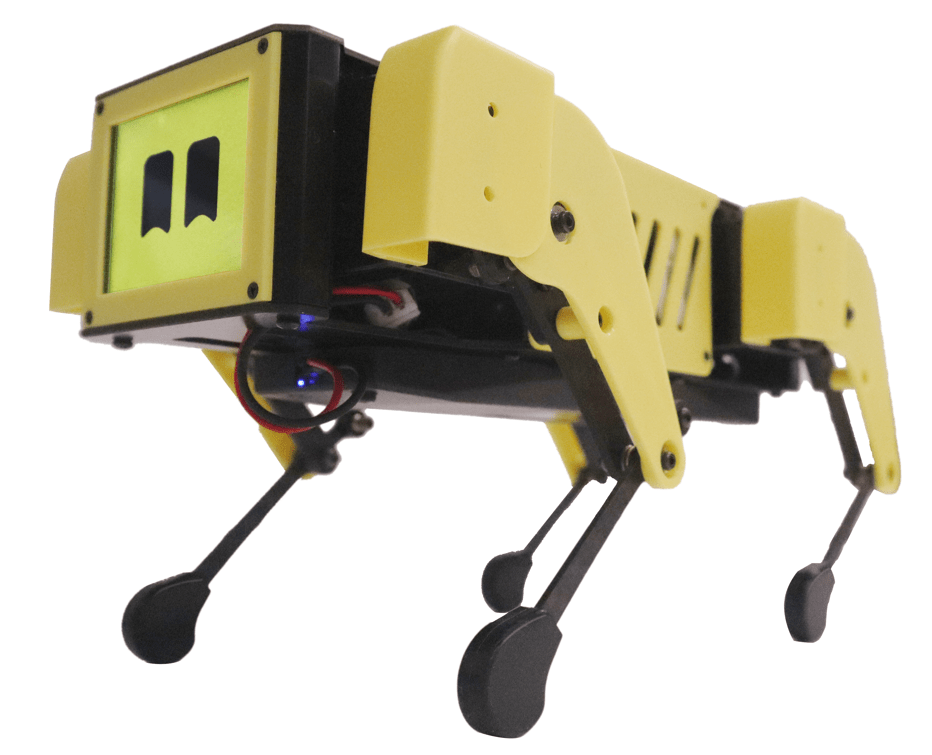
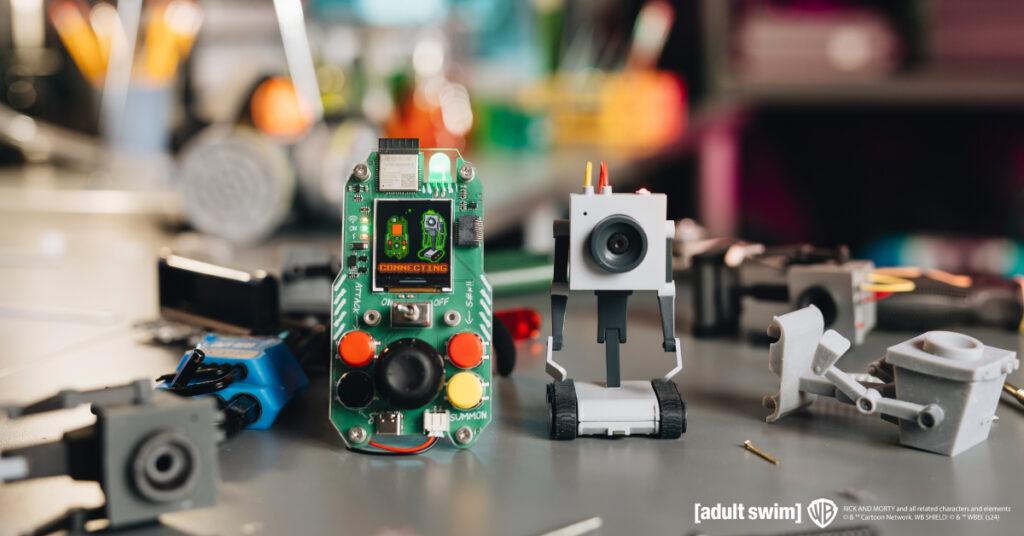
Der Butter Bot ist nicht nur ein einfacher Roboter, dessen einzige Aufgabe es ist, wie in der Serie Butter zu überreichen. Er wird mit einer einzigartigen Fernbedienung geliefert, die präzises Manövrieren ermöglicht und gleichzeitig eine Live-Übertragung von der Kamera des Roboters bietet. Dieser interaktive Roboter verfügt über fortschrittliche AI-Funktionen und ist damit ein vielseitiger Begleiter in jeder Umgebung.
„Den Butter Bot aus Rick und Morty in die reale Welt zu bringen, war eine unglaubliche Reise“, sagt Albert Gajšak, CEO von CircuitMess, und drückt seine Begeisterung für den Launch aus: „Wir haben viel Herzblut in die Entwicklung eines Produkts gesteckt, das nicht nur dem Originalcharakter Ehre macht, sondern auch eine völlig neue Ebene der Interaktivität und Funktionalität hinzufügt. Wir können es kaum erwarten zu sehen, wie die Fans ihn nutzen und genießen werden.“

Bis heute hat CircuitMess zahlreiche lehrreiche Produkte entwickelt, die Kinder und Erwachsene dazu ermutigen, zu erschaffen, anstatt nur zu konsumieren. Sie haben erfolgreich 7 Kickstarter-Kampagnen abgeschlossen und tausende Geeks weltweit glücklich gemacht. Die Kits von CircuitMess sind eine einzigartige Kombination von Ressourcen, um auf unterhaltsame und aufregende Weise etwas über Hardware und Software zu lernen.
Die Kickstarter-Kampagne für den Butter Bot bietet Unterstützern exklusive Frühbucherpreise und spezielle Belohnungen.
Für weitere Informationen und zur Unterstützung des Projekts besuchen Sie die Kickstarter-Seite von Butter Bot hier (https://www.kickstarter.com/projects/albertgajsak/rick-and-mortytm-butter-bot-an-ai-powered-desk-robot) oder schauen Sie sich die Websites von Geek Club und CircuitMess an, um alle anderen Kits zu sehen.
Über Geek Club
Geek Club ist ein Team von Designern und Ingenieuren, das von den Mitbegründern Nicolas Deladerrière und Nikita Potrashilin geleitet wird. Ihre Mission ist es, elektronische Konstruktionskits für neugierige Köpfe in über 70 Ländern weltweit zu entwickeln. Ihre Inspiration kommt meist von der NASA und anderen Weltraumagenturen der Welt, und sie hoffen, den Geist ihrer Fans weiter zu fördern, ihre Fähigkeiten zu stärken und ihr Wissen über Elektronik und Weltraum zu erweitern.
Ihre Vision ist es, mit ihren weltraumthematischen STEM-Kits eine Welt von Erfindern für die nächste Technologiegeneration zu schaffen. Mehr erfahren Sie unter www.geekclub.com.

Nicolas Deladerrière, Mitbegründer von Geek Club
E-Mail: [email protected]
Über CircuitMess
CircuitMess ist ein Technologie-Startup, das 2017 von Albert Gajšak und Tomislav Car nach einer erfolgreichen Kickstarter-Kampagne für MAKERbuino gegründet wurde.
CircuitMess beschäftigt junge, ehrgeizige Menschen und ist kürzlich in ein neues Büro in der kroatischen Hauptstadt Zagreb umgezogen. Dort suchen sie nach talentierten Einzelpersonen, die ihnen helfen, einzigartige elektronische Produkte zu entwickeln und Technologie auf unterhaltsame und aufregende Weise für die breite Masse zugänglich zu machen. Mehr erfahren Sie unter www.circuitmess.com.

Albert Gajšak, Mitbegründer und CEO von CircuitMess
E-Mail: [email protected]
Über Rick and Morty
Rick und Morty ist eine Emmy®-preisgekrönte halbstündige animierte Hitkomödie des Senders Adult Swim, die einem soziopathischen genialen Wissenschaftler folgt, der seinen von Natur aus ängstlichen Enkel auf gefährliche Abenteuer im ganzen Universum mitnimmt. Rick Sanchez lebt bei der Familie seiner Tochter Beth und bringt ständig ihren Ehemann Jerry, ihre Enkelin Summer und ihren Enkel Morty in intergalaktische Eskapaden.
In den Hauptrollen spielen Ian Cardoni, Harry Belden, Sarah Chalke, Chris Parnell und Spencer Grammer.
Über Warner Bros. Discovery Global Consumer Products
Warner Bros. Discovery Global Consumer Products (WBDGCP), Teil der Revenue & Strategy-Abteilung von Warner Bros. Discovery, erweitert das mächtige Portfolio der Unterhaltungsmarken und -franchises des Unternehmens in das Leben der Fans auf der ganzen Welt. WBDGCP arbeitet weltweit mit erstklassigen Lizenznehmern an preisgekrönten Programmen für Spielzeug, Mode, Wohnkultur und Verlagswesen, die von den größten Franchises der Warner Bros.-Film-, Fernseh-, Animations- und Spiele-Studios, HBO, Discovery, DC, Cartoon Network, HGTV, Eurosport, Adult Swim und mehr inspiriert sind.
Mit innovativen globalen Lizenz- und Merchandising-Programmen, Einzelhandelsinitiativen und Werbepartnerschaften ist WBDGCP eine der führenden Organisationen für Lizenzierung und Einzelhandelsmerchandising weltweit.