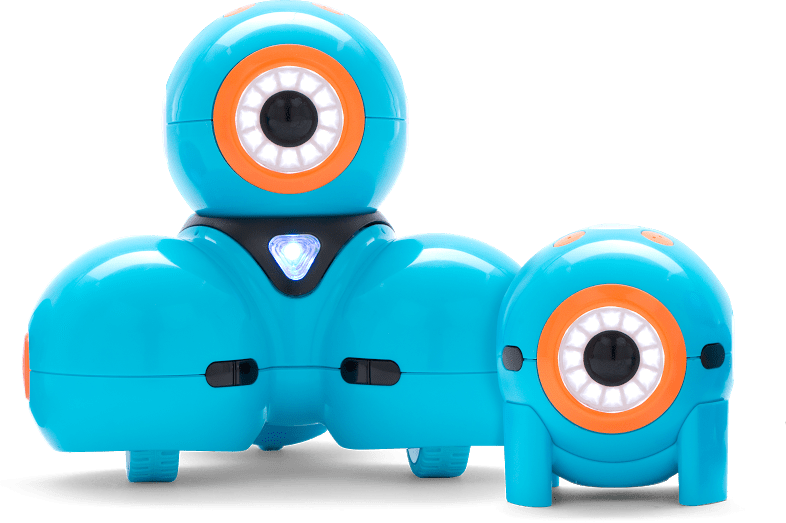
Wonder Workshop makes learning to code meaningful and fun for children. Dash & Dot, a pair of robots, combine play and learning for children ages 5 and up. For more information, visit our website at http://makewonder.com.
Dash is an explorer.
• Drives around.
• Senses objects in front and behind.
• Hears and responds to sounds.
• Comes to life with sound, lights, and head motion.

Dot is an instigator.
• Responds to how it is moved.
• Sends a signal for Dash to see where it is.
• Hears and responds to sounds.
• Transforms with sounds, lights, and imagination.
Dash & Dot connect wirelessly over Bluetooth and come with four iPad and Android experiences:
- Go gets you started and exploring the world of Dash & Dot in no time. Simply connect with Bluetooth and get off and running. This app is a portal for online ideas and content.

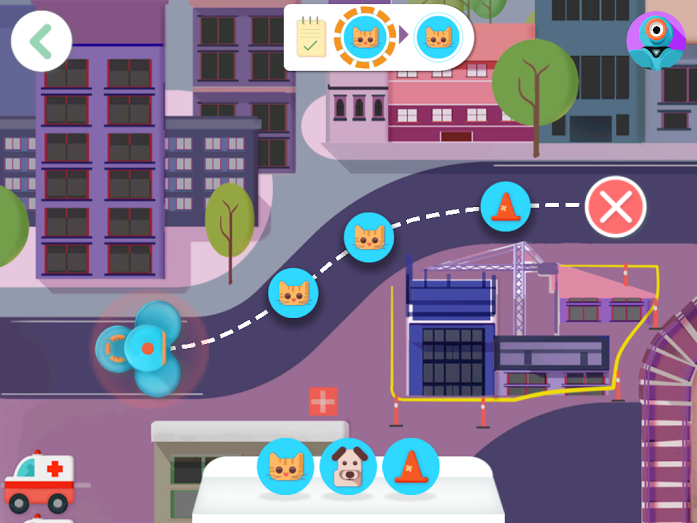
- Path takes Dash on adventures as kids draw a path for Dash to take. Unlock themes and special animations. This app teaches basic sequencing and event- based programming.
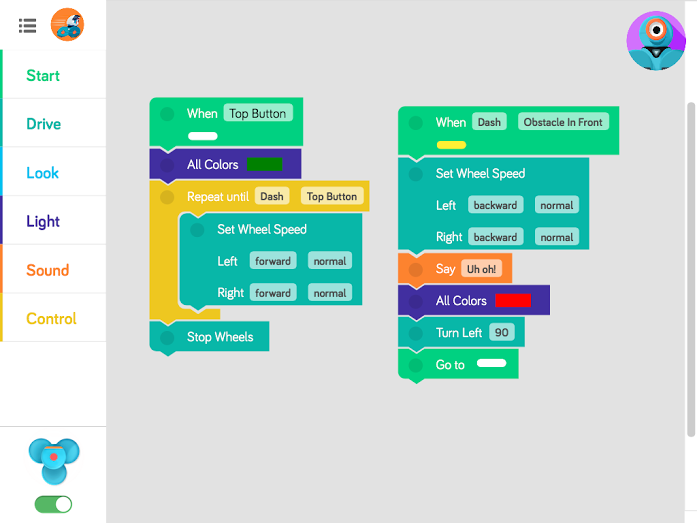
- Blockly is a visual programming tool that lets kids control Dash & Dot, making them move and interact with each other. This app teaches sequencing, events, conditionals, and loops.
- Xylo is a music app that uses the xylophone accessory. Compose songs and program Dash to move around while playing music. This app teaches sequencing and loops.

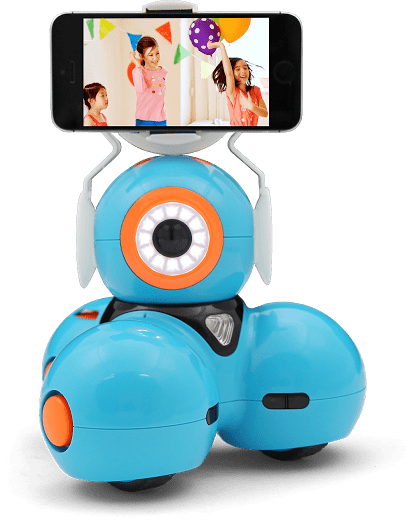
Accessories for Dash & Dot help give them additional looks and abilities. They include a xylophone, a pusher bar, a smartphone mount (to take videos with any smartphone), bunny ears, and a tow hook.
Dash is $199. The Wonder Pack, including all robots and accessories, is $349. They are available for purchase at the Wonder Workshop website here: http://makewonder.com.