Synapticon macht MOTORCORTEX als Online-Version verfügbar
Böblingen, den 04.08.2022 – Auch in der Welt des Maschinenbaus und der Robotik hat sich Software in den vergangenen Jahren zum entscheidenden Erfolgsfaktor entwickelt. Sowohl die Art und Weise wie Robotersteuerungen entwickelt werden als auch ihre Leistungsfähigkeit in der Praxis sind für die Hersteller von Industrierobotern von großer Bedeutung. Vor diesem Hintergrund hat Synapticon mit MOTORCORTEX.io nun eine bahnbrechende Lösung im SaaS (Software as a Service) Modell vorgestellt. Sie ermöglicht es sehr leistungsfähige, 100% individuelle Robotersteuerungen komfortabel in der Cloud zu entwickeln, auf Steuerungen im Feld bereitzustellen und über einen digitalen Zwilling zu testen. In der Serienproduktion des Roboters bzw. Automatisierungsprodukts kann die individuelle Steuerungs-Software dann in Masse bereitgestellt und auch offline betrieben werden. Dafür können neben Industrie-PCs auch Embedded-Module bis hin zu einem Raspberry Pi eingesetzt werden.

„Die Automatisierung hat in den vergangenen Jahren nochmals deutlich an Fahrt aufgenommen. Tragende Elemente sind dabei unter anderem fahrerlose Transportsysteme (AGV/AMR) sowie Cobots und Leichtbauroboter. Diese Systeme stellen nicht nur neue Herausforderungen an die Hardware, sondern auch an die Software, speziell wenn es um Themen wie Navigation, Sicherheit und das Erlernen von Abläufen geht“, erklärt Nikolai Ensslen, CEO und Gründer von Synapticon. „Die große Herausforderung ist nun für viele Hersteller: Sie müssen ihren Kunden Lösungen anbieten, die preislich attraktiv und immer auf dem neuesten Stand der Technik sind. Die Unternehmen sollen also in der Lage sein, individuelle Steuerungssoftware für ihre Systeme schnell und kosteneffizient zu entwickeln. Hierfür haben wir mit MOTORCORTEX nun eine Lösung im Angebot, die am Markt einmalig ist und welche die Entwicklungszeit von Robotersteuerungen drastisch verkürzt.“
Echtzeit-Steuerungsanwendungen in der Cloud erstellen und auf Offline-Steuerungen deployen sowie aus der Ferne warten
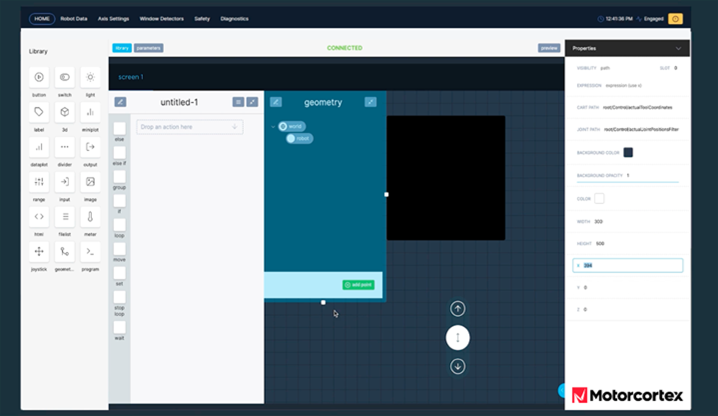
MOTORCORTEX umfasst ein ganzes Paket an Apps bzw. Templates und Tools zum Entwerfen, Steuern, Analysieren und Bereitstellen von industriellen Automatisierungsanwendungen. Dazu gehört beispielsweise auch ein Widget für die einfache grafische Programmierung (“no code”) von Robotern, was im Bereich der Cobots zum Standard wird. Die Plattform für individuelle Roboter- und Maschinensteuerungen ist mit modernster Softwaretechnologie implementiert, erfüllt alle Anforderungen der Automation der Zukunft und ist zugleich hoch leistungsfähig und skalierbar.
Das integrierte Linux-basierte und ressourcenoptimierte Betriebssystem bietet Echtzeitsteuerung von industrieller Hardware über EtherCAT, wie z.B. auf Synapticon SOMANET basierende Antriebsachsen und eine sehr leistungsstarke Kommunikationsschicht für Anwendungen auf höherer Ebene, wie z. B. eine Benutzeroberfläche oder Datenanalysetools. MOTORCORTEX ermöglicht Hochgeschwindigkeits-Streaming-Kommunikation direkt zum Webbrowser ohne Zwischenserver, was in der Industrie eine Wende darstellt. Es ist jetzt möglich, reaktionsschnelle Webanwendungen für eine extrem reibungslose Interaktion mit Maschinen zu erstellen. Die Lösung bietet offene APIs für alle wichtigen Programmiersprachen wie Javascript, Python und C++. Diese offene Architektur bietet viel mehr Freiheiten als aktuelle industrielle Steuerungssysteme und ermöglicht echte Industrie 4.0-Anwendungen mit nur wenigen Codezeilen. Die Kommunikation mit umgebenden bzw. höher liegenden Steuerungseinheiten wird über OPC UA unterstützt.
„Die Nutzung von MOTORCORTEX ist so einfach wie das Einrichten einer einfachen Webseite. Mit etwas Konfigurationsarbeit und ein paar Zeilen Code können sich Entwickler von jedem Webbrowser aus direkt und sicher mit ihrer Maschine verbinden und schnell Daten austauschen. Kein anderes industrielles Steuerungssystem ist so einfach und flexibel für anspruchsvolle und moderne Steuerungsaufgaben einzurichten“, erklärt Nikolai Ensslen. „Anwendungen, die auf MOTORCORTEX basieren, teilen alle ihre Daten automatisch in der darunterliegenden Echtzeitdatenbank, so dass externe Anwendungen oder Dienste einfach und sicher auf die Daten zugreifen können.“
Entwicklung beschleunigt, Kosten gesenkt
Erste Projekte mit Kunden zeigen, dass es Entwicklern mit MOTORCORTEX in der Cloud gelingt, den Entwicklungsprozess von Software um bis zu 90% zu reduzieren. Zugleich sinken tatsächlich die Kosten für die Softwareentwicklung deutlich, da MOTORCORTEX auf ein einfaches Lizenzmodell ohne zusätzliche Kosten für Wartung und Weiterentwicklung setzt. Da MOTORCORTEX zudem vollkommen Hardware-unabhängig ist, bleibt es den Entwicklern freigestellt, welche Hardware-Komponenten sie für die Entwicklung ihrer Steuerungssoftware nutzen. Ideale Resultate und höchste Effizienz verspricht dabei die Kombination der MOTORCORTEX-Software mit den SOMANET-Servoantrieben aus dem Motion Control-Portfolio von Synapticon.
MOTORCORTEX hat nicht den Anspruch, der eigenen Softwareentwicklung von Roboterherstellern oder innovativen Steuerungslösungen von Drittanbietern, etwa zum einfachen Teachen von Robotern oder für die Integration von Bildverarbeitung und KI, zuvor zu kommen bzw. diese zu ersetzen. Die Plattform soll vielmehr als solide Grundlage für diese dienen und die Entwickler in der Basis entlasten.
„MOTORCORTEX versteht sich, ebenso wie die SOMANET-Elektroniken, als im Endprodukt versteckte Infrastruktur. Sie soll ein leistungsfähiges, zuverlässiges Fundament für die modernsten und innovativsten Robotersteuerungen zur Verfügung stellen. Wir sehen uns als Technologie- und Infrastrukturpartner der besten Innovatoren in Robotik und Automation,” fasst Nikolai Ensslen zusammen. „Ich bin mir sicher, dass wie in vielen anderen Industriebereichen zukünftig Software auch in der Robotik zu einem wesentlichen und kritischen Unterscheidungsmerkmal wird. Mit MOTORCORTEX geben wir Unternehmen hierfür die beste Plattform in die Hand, so dass diese sich auf die relevanten Innovationen für Ihre Kunden und die Differenzierung von ihrem Wettbewerb konzentrieren können.“
Mehr Informationen unter www.synapticon.com