Volker Spanier präsentiert neuen Epson 6-Achs-Roboter Cobot AX6 im Robots-Blog Interview auf automatica 2025
Antworten

Robotistan, a pioneer in innovative educational solutions, has introduced a new STEM robot called BerryBot. Designed to help children develop coding and robotics skills, this creative and educational robot offers practical experiences in science, technology, engineering, and mathematics (STEM).
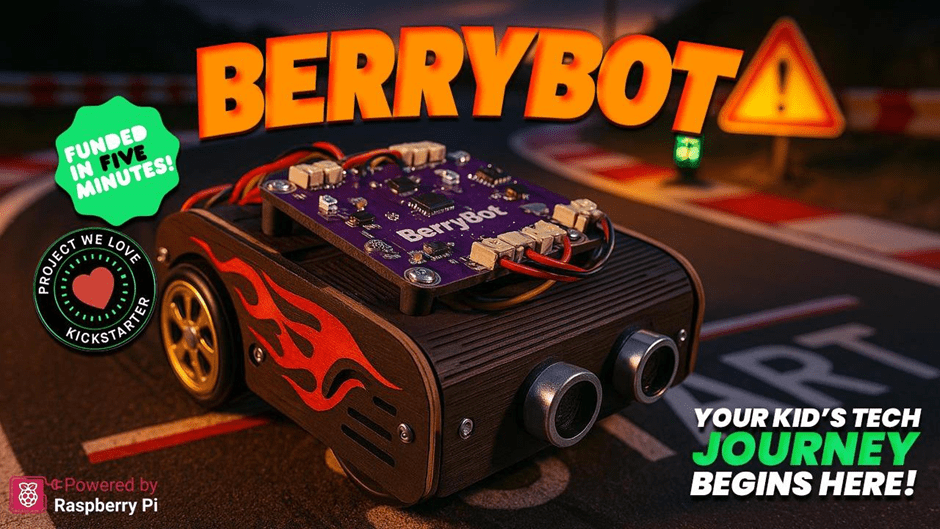
BerryBot is more than just a robot; it’s a learning platform that nurtures creativity and problem-solving skills. With its compact and customizable design, BerryBot allows users to paint and personalize their robot, thanks to its wooden body.
The wooden structure not only reflects an eco-friendly design approach but also allows children to shape their robots according to their own style. BerryBot is designed to be flexible enough for both classroom and home use.
BerryBot’s innovative features support the development of both technical and creative skills:
BerryBot offers young aspiring engineers a fun and educational experience. While creating different movement scenarios, children not only enhance their problem-solving skills but also develop creative projects.
Thanks to BerryBot’s multi-mode structure, users can program the robot’s movement capabilities in various ways. This feature transforms BerryBot from being just a toy to a valuable educational tool that encourages creative thinking.
Mehmet Akçalı, Marketing and Product Director at Robotistan, highlighted the educational features of BerryBot:
„BerryBot offers a practical and fun way for children to step into the world of STEM. Combining coding skills with creative projects, this robot will become an indispensable educational tool for both teachers and parents.“
He also mentioned a special opportunity for early supporters:
„We’re thrilled to announce our Kickstarter campaign, where backers can take advantage of the Early Bird offer. Additionally, as part of our commitment to supporting STEM education, for every 10 pledges, we will gift one BerryBot to a school or an educational organization in need. This way, our supporters not only get an amazing educational robot but also help inspire the next generation of young innovators.“
As the importance of STEM education continues to grow, innovative tools like BerryBot are preparing young minds for the future. With its fun yet educational nature, BerryBot strengthens children’s coding, algorithmic thinking, and problem-solving skills while also inspiring creative projects.
Robotistan emphasizes that BerryBot is not just an educational robot but also a platform where children can express themselves. Produced with this vision in mind, BerryBot is ready to make a difference both at home and in educational environments.

To learn more about BerryBot and to be among the first to own it and take advantage of the Early Bird offer, visit the Kickstarter page!
The HP Robots Otto is a versatile, modular robot designed specifically for educational purposes. It offers students and teachers an exciting opportunity to immerse themselves in the world of robotics, 3D printing, electronics and programming. The robot was developed by HP as part of their robotics initiative and is particularly suitable for use in science, technology, engineering and mathematics (STEM) classes.
Key features of Otto:
Educational approach:
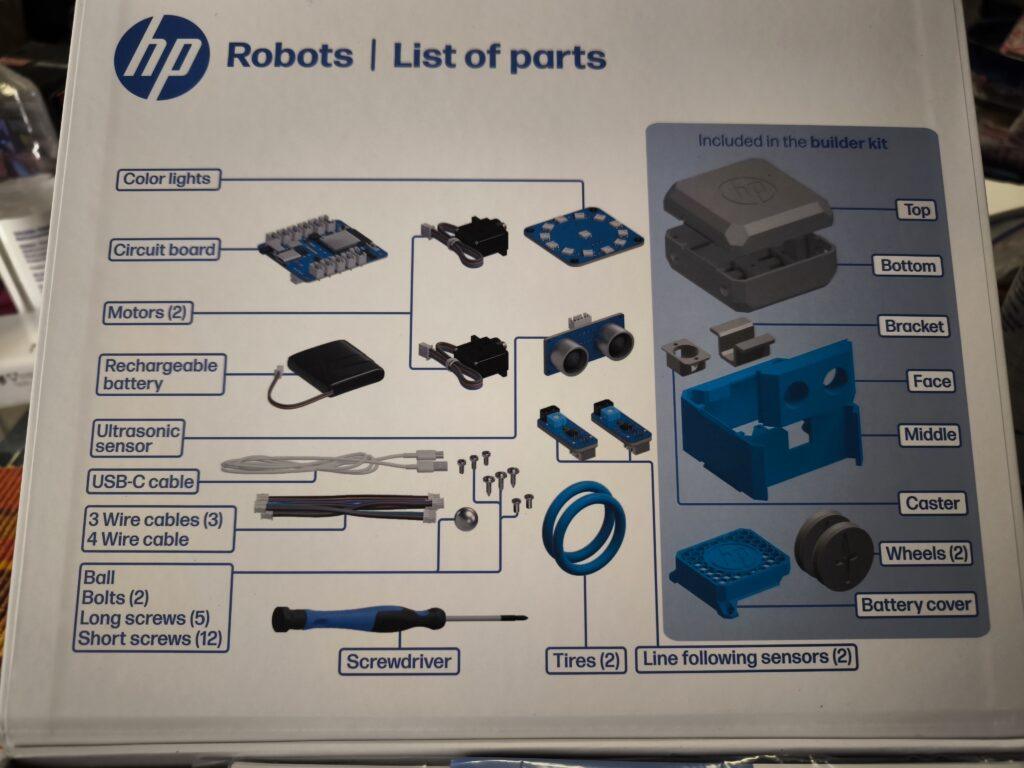
Otto is ideal for use in schools and is aimed at students from the age of 8. Younger students can work under supervision, while older students from the age of 14 can also use and expand the robot independently. The kit contains all the necessary components to build a functioning robot, including motors, sensors, and a rechargeable battery.
Programming environments:
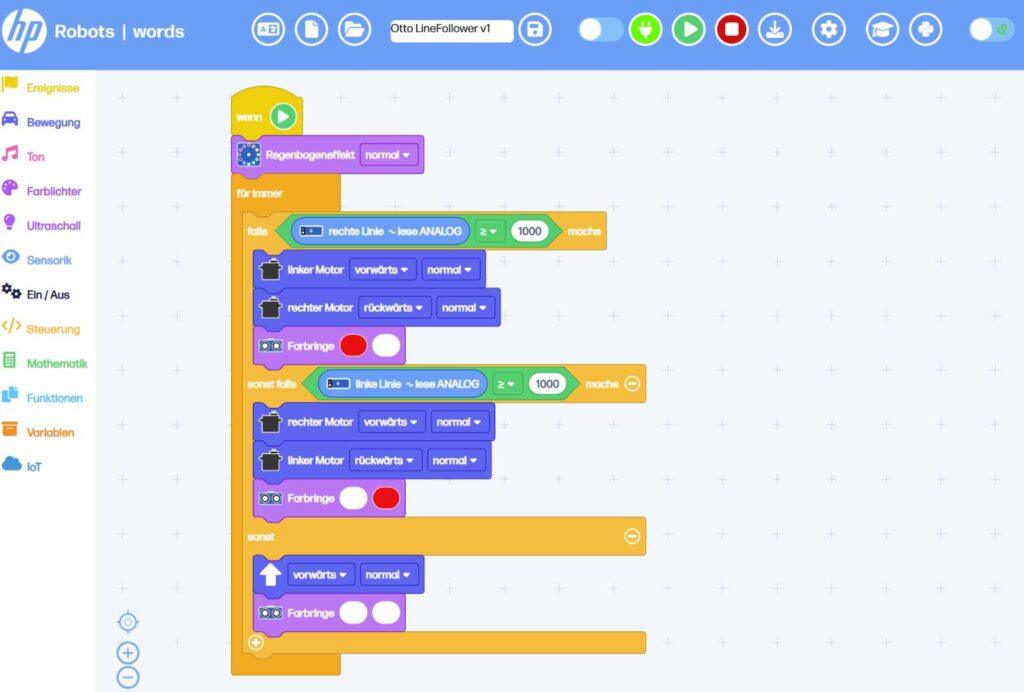
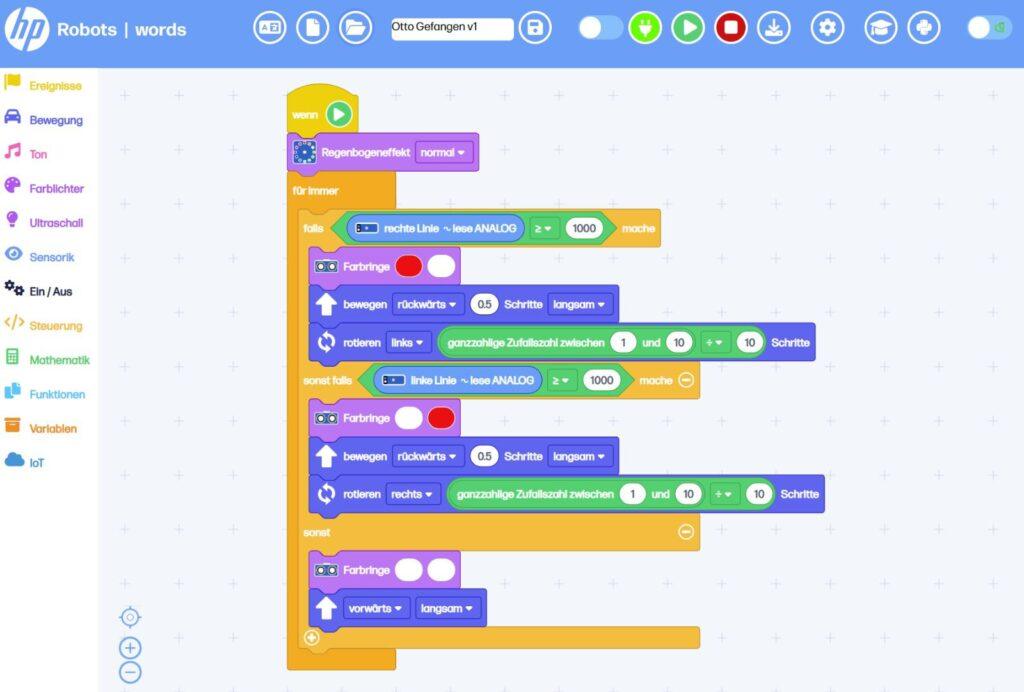
Otto is programmed via a web-based platform that runs on all operating systems. This platform offers different modes:
Expansion Kits:
In addition to the Starter Kit, there are several expansion kits. All expansion kits require the starter kit, as they are built on top of it.
Emote Expansion Kit:
Sense Expansion Kit:
Interact Expansion Kit:
Invent Expansion Kit:

Use in the classroom:
Otto comes with extensive resources developed by teachers. These materials help teachers design effective STEM lessons without the need for prior knowledge. The robot can be used both in the classroom and at home. The didactic materials include:
Conclusion:
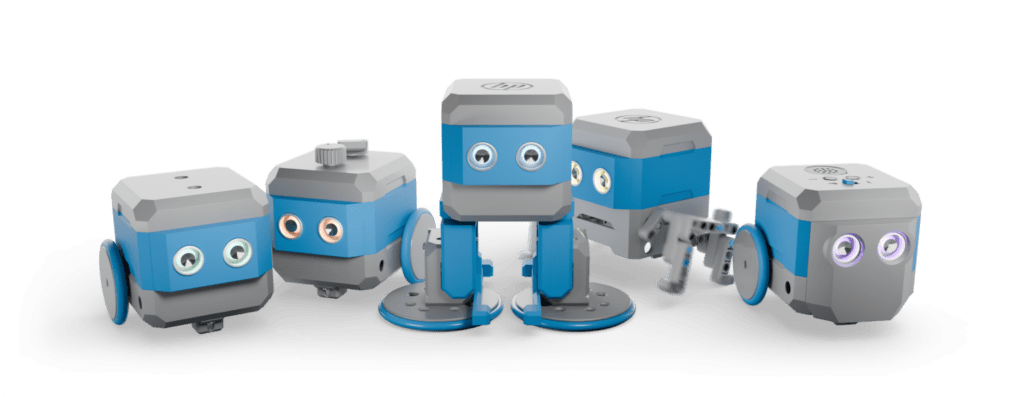
The HP Robots Otto is an excellent tool for fostering technical understanding and creativity in students. Thanks to its modular design and diverse programming options, it offers a hands-on learning experience in the field of robotics and electronics. Ideal for use in schools, Otto provides teachers with a comprehensive platform to accompany students on an exciting journey into the world of technology. In particular, Otto’s versatility through the 3D-printed parts and expansion packs offers the opportunity to build the personal learning robot.
Der HP Robots Otto ist ein vielseitiger, modularer Roboter, der speziell für Bildungszwecke entwickelt wurde. Er bietet Schülern und Lehrern eine spannende Möglichkeit, in die Welt der Robotik, 3D-Druck, Elektronik und Programmierung einzutauchen. Der Roboter wurde von HP als Teil ihrer Robotik-Initiative entwickelt und ist besonders für den Einsatz im MINT-Unterricht (Mathematik, Informatik, Naturwissenschaften und Technik) geeignet.
Hauptmerkmale von Otto:
Bildungsansatz:
Otto ist ideal für den Einsatz in Schulen gedacht und richtet sich an Schüler ab 8 Jahren. Jüngere Schüler können unter Aufsicht arbeiten, während ältere Schüler ab 14 Jahren den Roboter auch eigenständig nutzen und erweitern können. Das Kit enthält alle notwendigen Komponenten, um einen funktionierenden Roboter zu bauen, einschließlich Motoren, Sensoren und einer wiederaufladbaren Batterie.
Programmierumgebungen:
Die Programmierung von Otto erfolgt über eine webbasierte Plattform, die auf allen Betriebssystemen läuft. Diese Plattform bietet verschiedene Modi:
Expansion/Erweiterungs Kits:
Zusätzlich zum Starter Kit gibt es mehrere Erweiterungskits. Alle Erweiterungskits setzen das Starter-Kit voraus, da sie auf dessen Basis aufgebaut werden.
Emote Expansion Kit:
Sense Expansion Kit:
Interact Expansion Kit:
Invent Expansion Kit:
Einsatz im Unterricht:
Otto wird mit umfangreichen Ressourcen geliefert, die von Lehrern entwickelt wurden. Diese Materialien unterstützen Lehrer dabei, einen effektiven MINT-Unterricht zu gestalten, ohne dass Vorkenntnisse erforderlich sind. Der Roboter kann sowohl im Klassenraum als auch zu Hause eingesetzt werden. Die didaktischen Materialien umfassen:
Fazit:
Der HP Robots Otto ist ein hervorragendes Werkzeug zur Förderung von technischem Verständnis und Kreativität bei Schülern. Durch seine modulare Bauweise und die vielfältigen Programmiermöglichkeiten bietet er eine praxisorientierte Lernerfahrung im Bereich der Robotik und Elektronik. Otto ist ideal für den Einsatz in Schulen und bietet Lehrern eine umfassende Plattform, um Schüler auf eine spannende Reise in die Welt der Technologie zu begleiten. Besonders Ottos Vielseitigkeit durch die 3D-gedruckten Teile und Erweiterungspakete bieten die Möglichkeit, den persönlichen Lernroboter zu bauen.
The world of robotics is evolving – and right in the middle of it: pib. This humanoid robot, entirely 3D-printable, has received a prestigious award. The German Design Award 2025 has been granted to the printable intelligent bot, recognizing not only its technological sophistication but also its innovative design. But what makes pib so special?
A Robot for Everyone – and by Everyone
Imagine a robot that anyone can build and program themselves. A robot that isn’t just a technical gadget but an inspiration to create, research, and explore new paths in robotics. That’s exactly what pib is. Its open-source approach has a central goal: to make robotics and AI more accessible while breaking down technological barriers. Whether you’re a tinkerer, a student, or simply a technology enthusiast, pib invites everyone to be part of its ever-growing community.
German Design Award 2025: Recognition for Visionary Product Design
The German Design Award is one of the most prestigious awards for outstanding design. Every year, an international panel of experts honors innovative concepts in product design, communication, and architecture. This year, pib impressed the jury with its “Excellent Product Design” in the category „AI in Product Design Processes“ – a testament to how technology and aesthetics can go hand in hand.

Technology Meets Creativity
pib is more than just a robot – it is a platform for innovative technologies. The project enables curious minds to experiment with 3D printing, robotics, and artificial intelligence in a playful and hands-on way. No prior knowledge is required; anyone can contribute, co-create, and learn. The community plays a crucial role: the newly designed, human-like body that won the German Design Award was developed by a community member using CAD software.
Jürgen Baier, founder of pib, is thrilled about the recognition: „We are proud that pib has won the German Design Award! For us, this confirms that we are on the right path to making robotics and AI more accessible and tangible for everyone. It’s great to see that our vision of inspiring people to create and explore resonates so well.“
Learning with pib: Schools and Media Centers Adopt the Humanoid Robot
But it’s not just the maker community that’s excited about pib. More than 35 schools and media centers are already using it as an innovative learning platform. Students and teachers alike are leveraging this humanoid robot to explore future technologies in an interactive, hands-on manner. The focus goes beyond technical skills to include creative problem-solving and teamwork. By bringing knowledge to life, pib makes robotics and AI tangible – opening doors to the careers of tomorrow.
Open Source and Limitless Possibilities
Behind pib stands isento GmbH, a Nuremberg-based company specializing in software development and AI solutions. However, the robot thrives not only due to the work of isento employees but also through the contributions of its community. 3D printing files, detailed assembly instructions, programming code, AI skills, and a knowledge database are all freely available online – an open invitation to help shape the future of robotics.
Winning the German Design Award is a well-deserved honor for pib. But for this project, the award means much more: it is motivation to push the boundaries of what’s possible with open-source robotics even further. So if you’ve ever wondered how to create your own humanoid robot – pib has the answer.
Embodied, the creators of Moxie, have announced significant updates for the Moxie community as they transition away from cloud-based services. Below is a summary of the key points:
1. OpenMoxie Release
Embodied has launched **OpenMoxie**, a locally hosted solution that allows users to operate Moxie independently of Embodied’s cloud servers. This ensures that Moxie can continue functioning in home environments even after Embodied’s cloud operations cease by **January 30th**.
Action Required: To use OpenMoxie, users must update their Moxie with the latest Over-The-Air (OTA) update and follow the instructions in the OpenMoxie Setup Guide.

2. Critical OTA Update (v.24.10.803)
The latest OTA update, version 24.10.803, is essential to ensure compatibility with OpenMoxie. Users who haven’t already updated their Moxie should do so immediately.
Steps to update:
1. Power on Moxie and connect it to local Wi-Fi.
2. Allow up to one hour for the download and installation process.
3. Reboot Moxie after installation is complete.
3. Embodied’s Ongoing Mission
While Embodied continues to search for a long-term solution for Moxie, they have no new updates regarding its future. However, OpenMoxie provides a way for users to maintain their connection with Moxie in a cloud-free environment.
The company expressed gratitude to its community for their unwavering support and emphasized pride in creating a path forward for Moxie’s continued use.

Legal and Regulatory Disclaimer
Embodied has outlined several disclaimers regarding the use of OpenMoxie:
– **No Guarantees or Warranties:** The functionality, security, or reliability of OpenMoxie is not guaranteed. Users assume full responsibility for its implementation and operation.
– **Community-Driven and Unsupported:** OpenMoxie is provided „as is,“ with no technical support, updates, or maintenance from Embodied.
– **Regulatory Compliance:** Users are responsible for ensuring compliance with applicable laws and regulations when using or modifying OpenMoxie.
– **No Ongoing Obligations:** Embodied has no obligation to continue supporting or maintaining Moxie or its services; all future efforts will be community-led.
Conclusion
The release of OpenMoxie marks an important step in preserving the functionality of Moxie as Embodied winds down its cloud operations. While this transition places responsibility on users and the community, it offers a way to keep Moxie’s unique companionship alive in a self-hosted environment.
UPDATE YOUR MOXIE NOW (before update servers are shut down on 30.01.2025l
For detailed instructions on installing and running OpenMoxie, please see the OpenMoxie Setup Guide at this link.
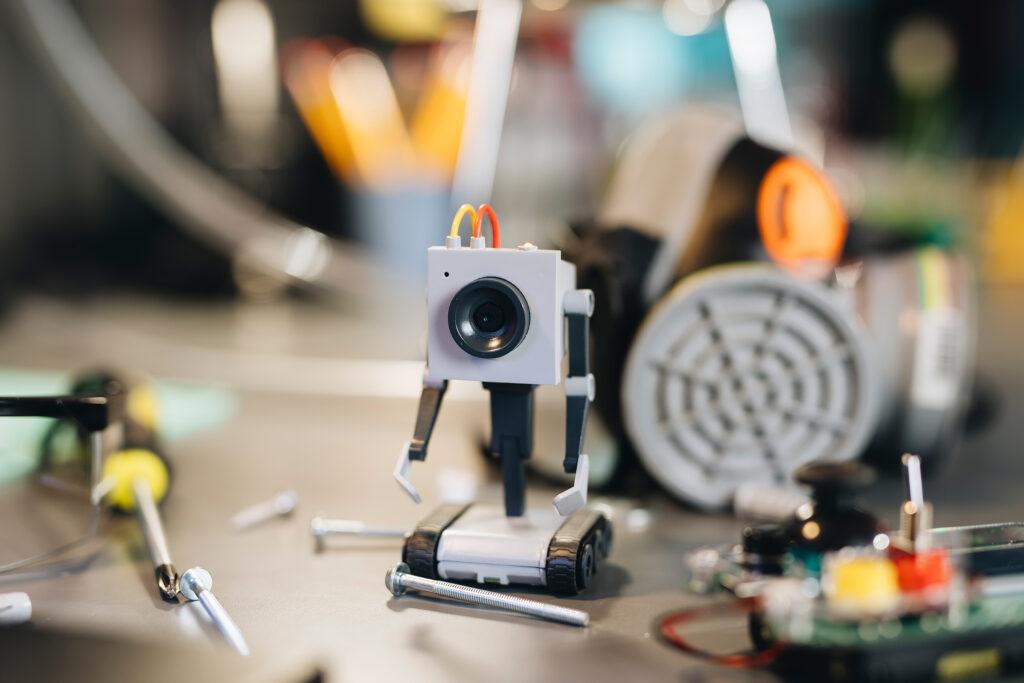
After a string of successful Kickstarter campaigns, Geek Club and CircuitMess have teamed up once again to launch an exciting new project: an AI-powered desk robot designed especially for Rick and Morty fans.
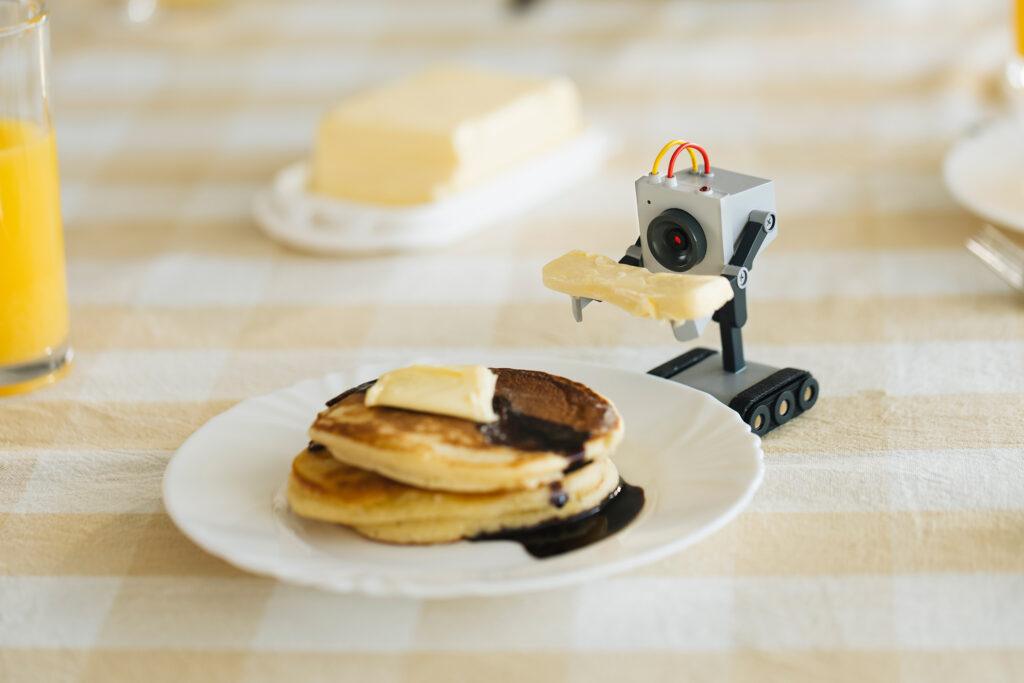
Zagreb, Croatia – November 2024 – Geek Club and CircuitMess are thrilled to announce the official launch of their Kickstarter campaign for the Butter Bot, a revolutionary AI-powered robot inspired by the one made famous in the popular Adult Swim series, Rick and Morty, and first seen in season 1 episode 9. This innovative product is officially licensed by Warner Bros. Discovery Global Consumer Products (WBDGCP), bringing the iconic Butter Bot to life in a way fans have never seen before.

From Screen to Reality: A Partnership That Is Bringing Butter Bot to Life
A shared love of Rick and Morty show between CircuitMess and Geek Club teams led to this project. Both companies saw an opportunity to bring a beloved character to life in a way that was both true to the show and technologically innovative. They chose the Butter Bot because of its iconic status and potential for interactive, educational, and entertaining applications. By turning a simple butter-passing robot into a multifunctional AI companion, they aimed to create a product that would resonate with fans and tech enthusiasts alike, merging humor and functionality seamlessly.

From Mars to Multiverse: The Next Chapter for CircuitMess and Geek Club
The collaboration was a logical union of the two companies after the massive success of the previous Kickstarter – NASA Perseverance AI-powered Mars Rover. Both companies create educational STEM DIY kits for kids and adults in order to make learning STEM skills easy and fun. While CircuitMess is focused primarily on toys, Geek Club’s products are always robot and space-themed.
„Partnering with WBDGCP on this project has been an exciting next step in our collaboration with Circtuit Mess, says Nico, co-founder of Geek Club, sharing his enthusiasm: “The Butter Bot is a testament to what happens when creativity, technology, and fandom collide. We’re excited to see the support and engagement from the community as we launch our Kickstarter campaign.“
Geek Club is an American company that specializes in designing and producing DIY robotics kits that educate their users on soldering and electronics. They focus primarily on space exploration and robotics, all to make learning engineering skills easy and fun for their young and adult audience.
Beyond Butter: Introducing the AI-Powered Butter Bot
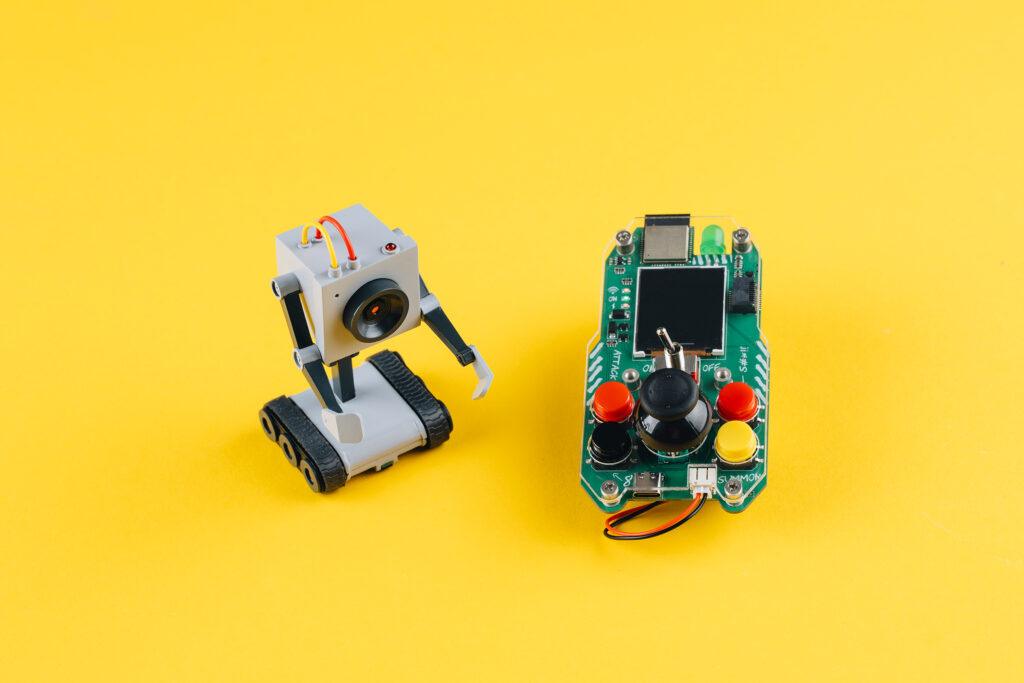
The Butter Bot is not just a simple robot with the sole purpose of passing the butter, as originally in the show. It comes with a unique remote controller that allows for precise maneuvering of its movement while also providing a live feed from the bot’s camera. The interactive robot has advanced AI capabilities, making it a versatile companion in any setting.

„Bringing the Butter Bot from Rick and Morty into the real world has been an incredible journey,” says Albert Gajšak, CEO of CircuitMess, expressing his excitement about the launch: “We’ve poured our hearts into creating a product that not only honors the original character but also adds a whole new level of interactivity and functionality. We can’t wait to see how fans will use and enjoy it.“
To this day, CircuitMess has developed numerous educational products that encourage kids and adults to create rather than just consume. They successfully delivered 7 Kickstarter campaigns and made thousands of geeks worldwide extremely happy. CircuitMess‘ kits are a unique blend of resources for learning about hardware and software in a fun and exciting way.
The Butter Bot Kickstarter campaign offers backers exclusive early-bird pricing and special rewards.
For more information and to back the project, visit the Butter Bot Kickstarter page here (https://www.kickstarter.com/projects/albertgajsak/rick-and-mortytm-butter-bot-an-ai-powered-desk-robot), or check out the Geek Club and CircuitMess websites to see all their other kits.
About Geek Club
Geek Club is a crew of designers and engineers led by co-founders Nicolas Deladerrière and Nikita Potrashilin. Their mission is to build electronic construction kits for curious minds in over 70 countries worldwide. They are most often inspired by NASA and other Space Agencies of the world and hope to push their fans’ minds further, strengthen their skills, and advance their knowledge of electronics and Space.
Their vision is to create a world of inventors for the next generation of technology with their space-themed STEM kits. Find out more at www.geekclub.com.
Nicolas Deladerrière, co-founder of Geek Club
Mail: [email protected]

About CircuitMess
CircuitMess is a technology startup founded in 2017 by Albert Gajšak and Tomislav Car after a successful Kickstarter campaign for MAKERbuino.
CircuitMess employs young, ambitious people and has recently moved to a new office in Croatia’s capital, Zagreb, searching for talented individuals who will help them create unique electronic products and bring technology to the crowd in a fun and exciting way. Find out more at www.circuitmess.com.
Albert Gajšak, co-founder and CEO of CircuitMess
Mail: [email protected]

About Rick and Morty
Rick and Morty is the Emmy® award-winning half-hour animated hit comedy series on Adult Swim that follows a sociopathic genius scientist who drags his inherently timid grandson on insanely dangerous adventures across the universe. Rick Sanchez is living with his daughter Beth’s family and constantly bringing her, his son-in-law Jerry, granddaughter Summer, and grandson Morty into intergalactic escapades.
Rick and Morty stars Ian Cardoni, Harry Belden, Sarah Chalke, Chris Parnell, and Spencer Grammer.
About Warner Bros. Discovery Global Consumer Products
Warner Bros. Discovery Global Consumer Products (WBDGCP), part of Warner Bros. Discovery’s Revenue & Strategy division, extends the company’s powerful portfolio of entertainment brands and franchises into the lives of fans around the world. WBDGCP partners with best-in-class licensees globally on award-winning toy, fashion, home décor and publishing programs inspired by the biggest franchises from Warner Bros.’ film, television, animation, and games studios, HBO, Discovery, DC, Cartoon Network, HGTV, Eurosport, Adult Swim, and more. With innovative global licensing and merchandising programs, retail initiatives, and promotional partnerships, WBDGCP is one of the leading licensing and retail merchandising organizations in the world.