- Das umfassende Robotik-Schulungspaket von ABB Robotics soll Schüler und Studierende auf die Arbeitswelt der Zukunft vorbereiten
- Es umfasst eine benutzerfreundliche kollaborative GoFa™-Roboterzelle, 56 Stunden an Kursmaterial sowie eine weltweit anerkannte STEM-Zertifizierung
- Neuester Baustein einer weltweiten Kampagne mit dem Ziel, zusammen mit Bildungseinrichtungen die Qualifikationslücke in der Automatisierung zu schließen

Mit der Einführung eines sofort einsatzbereiten Schulungspakets ist ABB Robotics bestrebt, die weltweite Ausbildungslücke in der Automatisierung weiter zu schließen sowie Schüler und Studierende auf die Arbeitswelt der Zukunft vorzubereiten. Das Paket, das einen kollaborativen Roboter (Cobot) vom Typ GoFa, Lehrmaterial und eine weltweit anerkannte technische Zertifizierung beinhaltet, ist Bestandteil einer globalen Kampagne, die Arbeitnehmerinnen und Arbeitnehmer für eine neue Ära der Automatisierung fit machen soll
.
Das ABB Robotics Education Package wurde entwickelt, um sicherzustellen, dass Bildungseinrichtungen hochqualifizierte junge Menschen für diejenigen Unternehmen ausbilden können, die von der robotergestützten Automatisierung profitieren wollen. Obwohl rund 80 Prozent der Bildungseinrichtungen weltweit glauben, dass die Automatisierung die Arbeitswelt in den kommenden zehn Jahren prägen wird, steht Robotik bei nur einer von vier Institutionen auf dem Lehrplan*. Gründe hierfür sind ein Mangel an ausgebildeten Lehrkräften und die Schwierigkeit, Robotik-Schulungen nahtlos in den Lehrplan zu integrieren.
„Da die robotergestützte Automatisierung in immer mehr Branchen – von der Fertigung und Distribution bis hin zum Einzelhandel und dem Gesundheitswesen – Einzug hält, suchen Unternehmen Menschen, die mit Robotern und Automatisierung vertraut sind“, betont Andrea Cassoni, Leiter der globalen Business Line General Industry bei ABB Robotics. „Das ABB Robotics Education Package bietet Schulen und Hochschulen eine einfache Möglichkeit, Robotik-Schulungskurse zu entwickeln und durchzuführen. Auf diese Weise trägt es dazu bei, die technische Qualifikationslücke zu schließen sowie Schüler und Studierende auf einen automatisierten Arbeitsplatz vorzubereiten.“
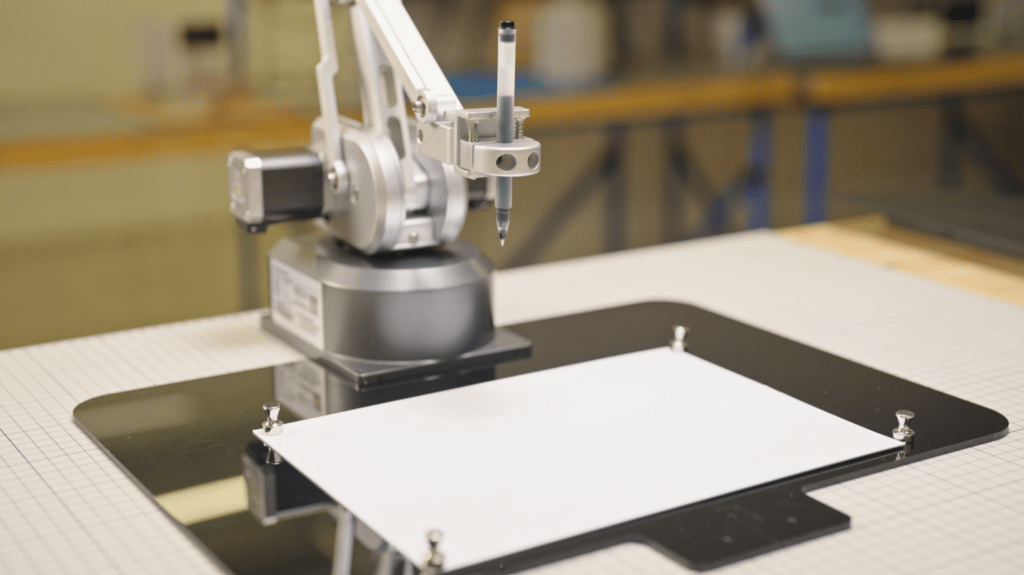
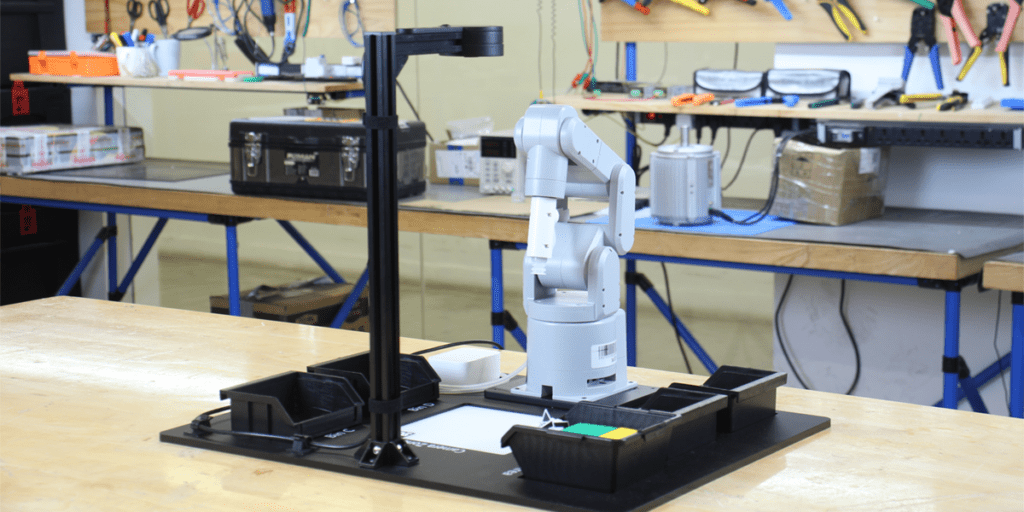
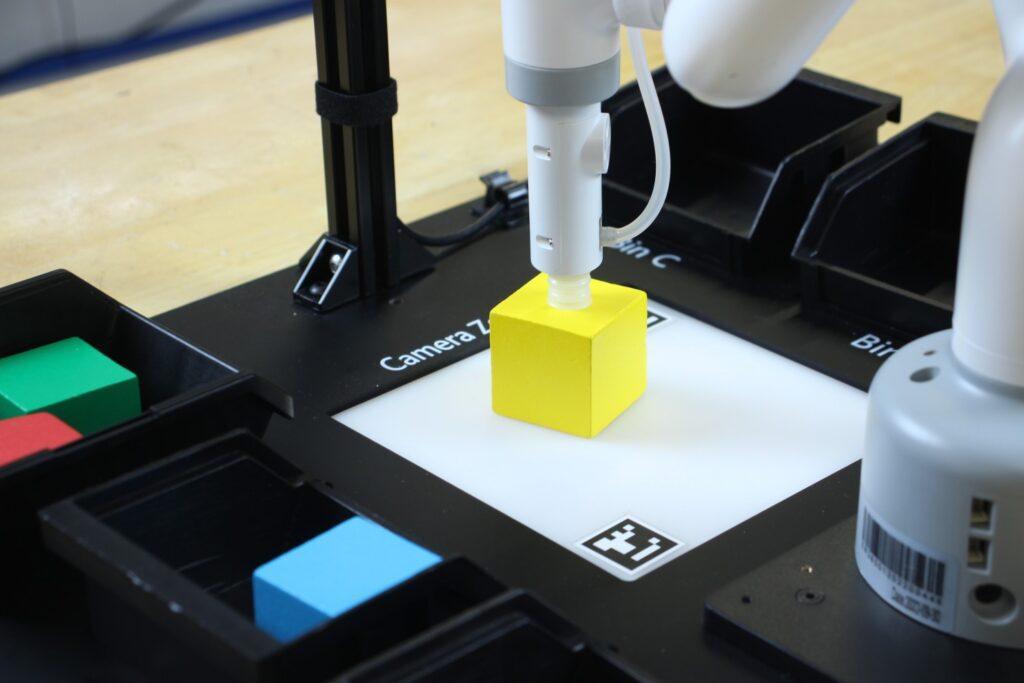
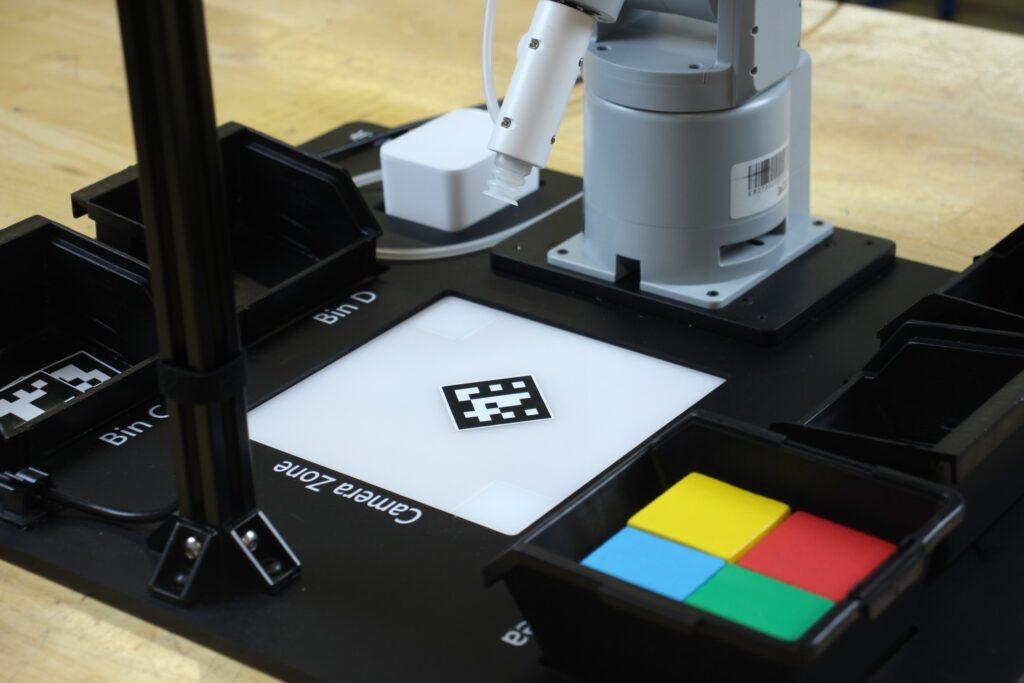
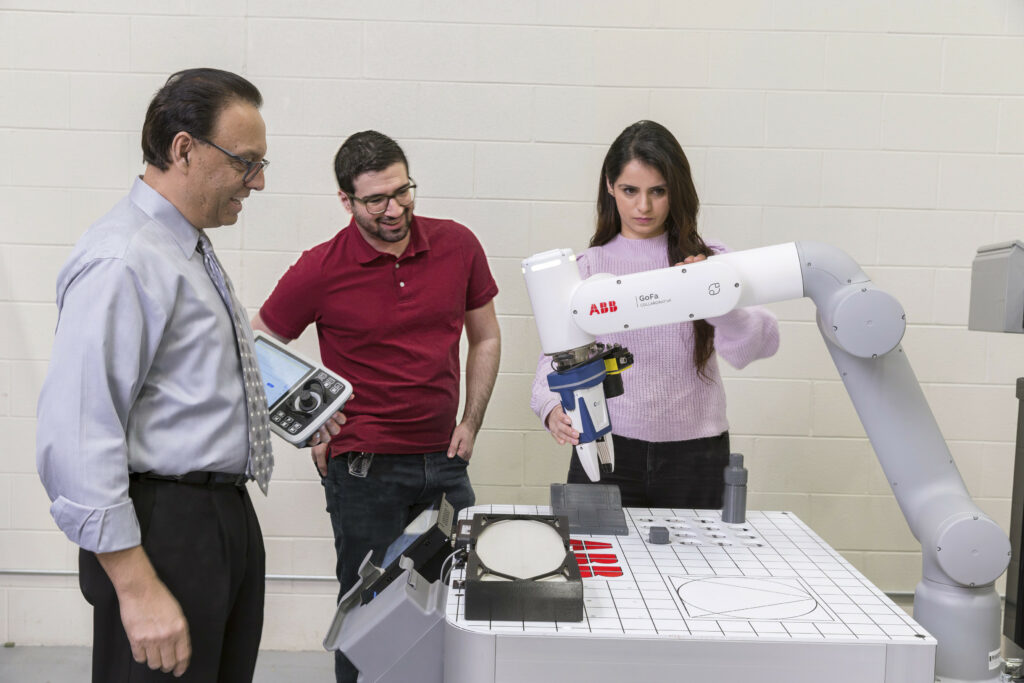
Das Herzstück des Pakets bildet die Schulungszelle mit einem voll funktionsfähigen kollaborativen GoFa-Roboter von ABB. Der auf einem kompakten Tisch montierte, preisgekrönte GoFa ist ein benutzerfreundlicher Cobot, der es Schülern und Studierenden ermöglicht, reale Industrieanwendungen wie Pick-&-Place-Aufgaben und 3D-Druck zu erlernen. Dank Lead-Through-Programmierung und der Software Wizard Easy Programming von ABB können auch 15-Jährige ohne technische Vorkenntnisse den Roboter bedienen.

Ein umfassendes Kursmaterial bietet den Lehrkräften alles, was sie benötigen, um die Teilnehmerinnen und Teilnehmer durch zwölf Lektionen für Einsteiger und Fortgeschrittene zu begleiten. Es führt von den Grundlagen der Robotik bis hin zu komplexeren Anwendungen und Programmen. Dazu wurde Schulungsmaterial aus der Industrie mithilfe von Pädagogen in ein schülerfreundliches Format gebracht, das Robotik-Konzepte verständlich darstellt. Insgesamt stehen 56 Stunden Inhalte, darunter Videos, interaktive Online-Übungen, 400 Testfragen sowie praktische Übungen mit dem Offline-Programmiertool RobotStudio® von ABB zur Verfügung. Letzteres wird von Unternehmen weltweit zur Planung, Simulation und Entwicklung realer Robotiklösungen in einer virtuellen Umgebung eingesetzt.
Der dritte Teil des Pakets ist eine weltweit anerkannte STEM-Zertifizierung für Lehrkräfte und Lernende, die von der Bildungsforschungs- und Zertifizierungsorganisation STEM.org unterstützt wird und authentifiziert ist. So können Lehrkräfte von ABB zertifiziert werden, die dann wiederum ihren Schülern oder Studierenden ihre Kompetenz zur Bedienung von Robotern bescheinigen können. Damit erhalten sie eine anerkannte Qualifikation, mit der sie gegenüber Arbeitgebern in über 80 Ländern ihre Fähigkeiten in der robotergestützten Automatisierung nachweisen können.

Die Einführung des Education Package ist ein weiterer Schritt im Bemühen von ABB, Schülern und Studierenden dabei zu helfen, die erforderlichen Fähigkeiten für eine Welt zu entwickeln, in der Roboter am Arbeitsplatz so selbstverständlich sein werden wie Laptops. Derzeit arbeitet ABB mit Bildungseinrichtungen in über 40 Ländern zusammen, um sicherzustellen, dass Schüler und Studierende die grundlegenden Kenntnisse der Roboterprogrammierung und -bedienung erlernen.
Mehr über das Schulungspaket sowie das Netzwerk von Schulungseinrichtungen, Partnerschaften und Schulungskurse von ABB erfahren Sie unter: https://new.abb.com/products/robotics/de/funktionspakete/schulungspaket.
*Quelle: ABB Education Survey 2022, basierend auf einer weltweiten Umfrage mit 2.301 Teilnehmenden