Robots-Blog showing all the robots at Spielwarenmesse Nuremberg 2025
Antworten

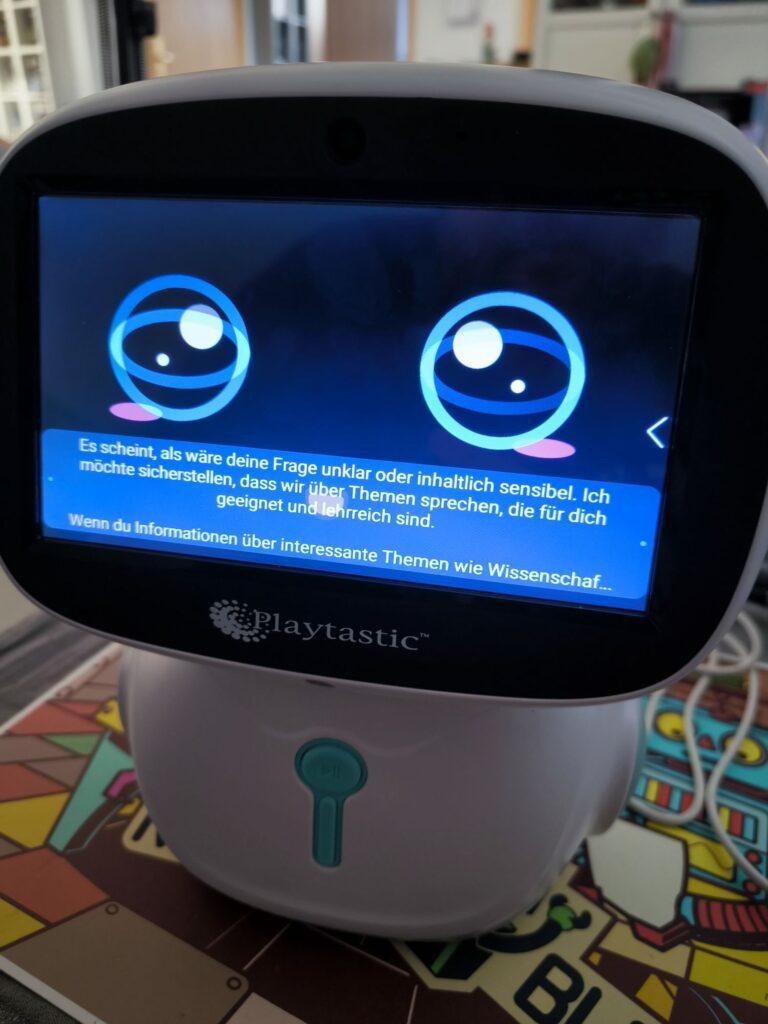
Nach dem Auspacken des Roboters hatte ich den Eindruck, ein Tablet auf Rädern zu meiner Robotersammlung hinzuzufügen. Der kleine Roboter, der sich selbst „Anna“ nennt, wie ich später herausfinden sollte, hatte auf jeden Fall ein Android-Tablet als Gesicht. Ein Tablet-Roboter.
Nach dem Einschalten erwartete mich jedoch nicht der übliche Einrichtungsprozess, wie er bei Android-Geräten üblich ist. Stattdessen wurde ich mit Musik und einem kurzen Animationsvideo begrüßt. Danach landete ich, nach einer kurzen Wartezeit (die nur beim ersten Start auftrat), auf einer kindlich-verspielten App-Übersicht. Meine erste Idee war, im Einstellungsmenü zunächst eine Verbindung zum WLAN herzustellen. Im Handbuch hatte ich bereits gelesen, dass der Roboter nur mit einem 2,4-GHz-WLAN kompatibel ist. Das WLAN meiner FritzBox arbeitet im Dual-Mode und stellt sowohl ein 5-GHz- als auch ein 2,4-GHz-Signal zur Verfügung. Der Roboter fand dieses WLAN, fragte nach dem Passwort, bestätigte die richtige Eingabe und verband sich – allerdings nur für wenige Sekunden, bevor er wieder „nicht verbunden“ anzeigte. Anscheinend mag er ausschließlich reines 2,4-GHz-WLAN. Nachdem ich mein reines 2,4-GHz-WLAN ausgewählt hatte, gab es keine weiteren Verbindungsprobleme.
Die Android-Betriebssystemversion und die installierten Apps waren anscheinend aktuell; zumindest wurden keine Updates gefunden. Neben den vorinstallierten Lern-, Musik- und Spiele-Apps fielen mir direkt die YouTube-(Kids)- und Spotify-App auf. Hier ahnte ich auch etwas Spaß für Erwachsene!
Der erste Start der YouTube-App (nachdem das WLAN eine Internetverbindung bot) forderte leider ein Update der Google-Dienste, was wiederum die Anmeldung mit einem Google-Konto erforderte. Macht es besser nicht wie ich und legt kein neues Google-Konto direkt über das Display des Roboters an. Nutzt stattdessen einen Computer oder euer Smartphone und gebt dem Roboter anschließend nur die Zugangsdaten. Das geht deutlich schneller als über das etwas träge „Tablet“ des Roboters.
Nach der Anmeldung gelang dann auch der Start der YouTube-App. Dabei stellte ich fest, dass es sich um die YouTube-Kids-App handelte, die ich bisher nicht kannte. Die App bietet kindgerechte Videos für verschiedene Altersstufen, aber nicht das vollwertige YouTube-Erlebnis, wie man es beispielsweise vom Fernseher kennt. Es können verschiedene Kinder-/Nutzerprofile angelegt werden, und mit einem „Eltern-Account“ lässt sich genau steuern, welche Videos und Kanäle verfügbar sind oder ob das Kind eigenständig andere Kanäle suchen darf.
Für erwachsene Nutzer bleiben immerhin alle Spotify-Inhalte verfügbar. Die vorinstallierte Spotify-App funktioniert identisch zu der Version auf meinem Smartphone. Der Klang des Roboters ist laut und basslastig; manchmal hört man dadurch das Plastikgehäuse etwas vibrieren. Für Kinder und ältere Karaoke-Fans gibt es in der App „KinderFernsehen“ eine Karaoke-Videosammlung. Ein mitgeliefertes Mikrofon lässt sich an der Rückseite des Roboters einstecken. Nach dem Einschalten des Mikrofons wird der eigene Gesang mit ordentlich Hall-Effekt durch den Roboter wiedergegeben. Ein Anschluss für ein zweites Mikrofon für Duett-Partner ist ebenfalls vorhanden; allerdings wird nur ein Mikrofon mitgeliefert – ein Tablet-Karaoke-Musik-Video-Roboter.
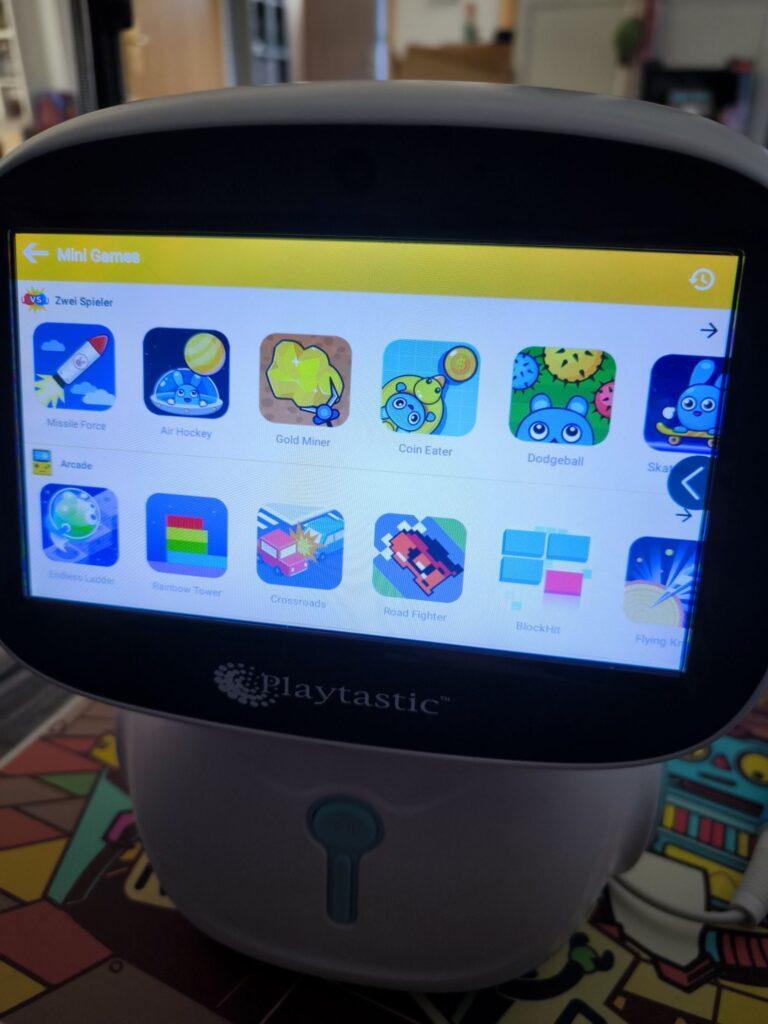
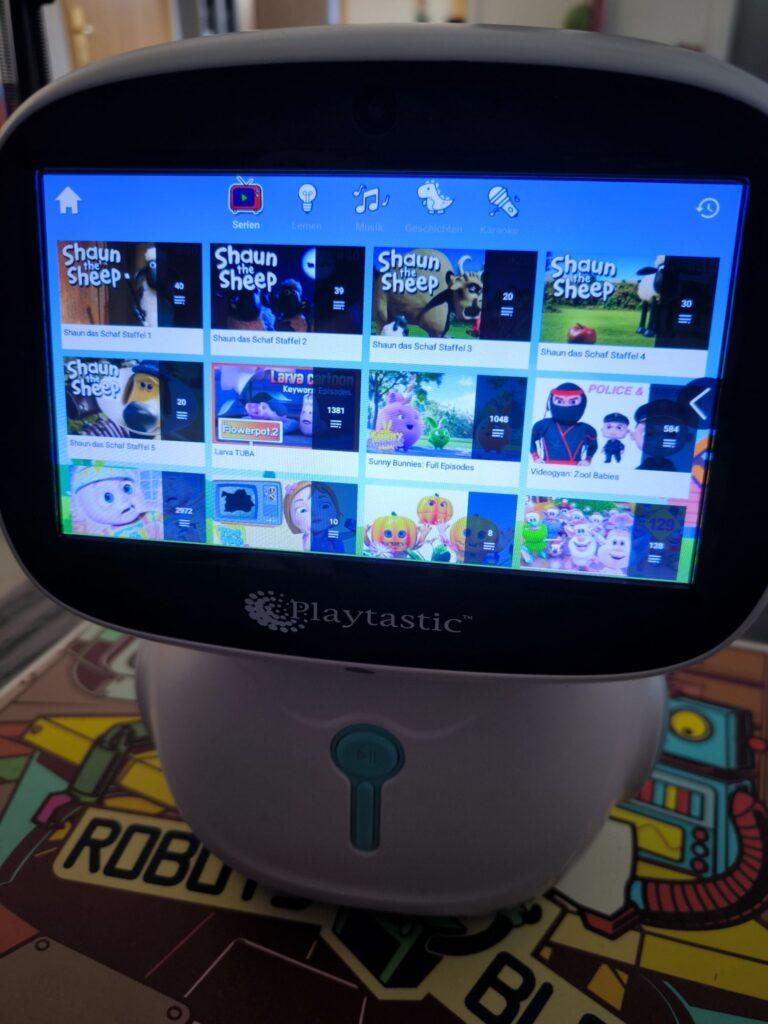
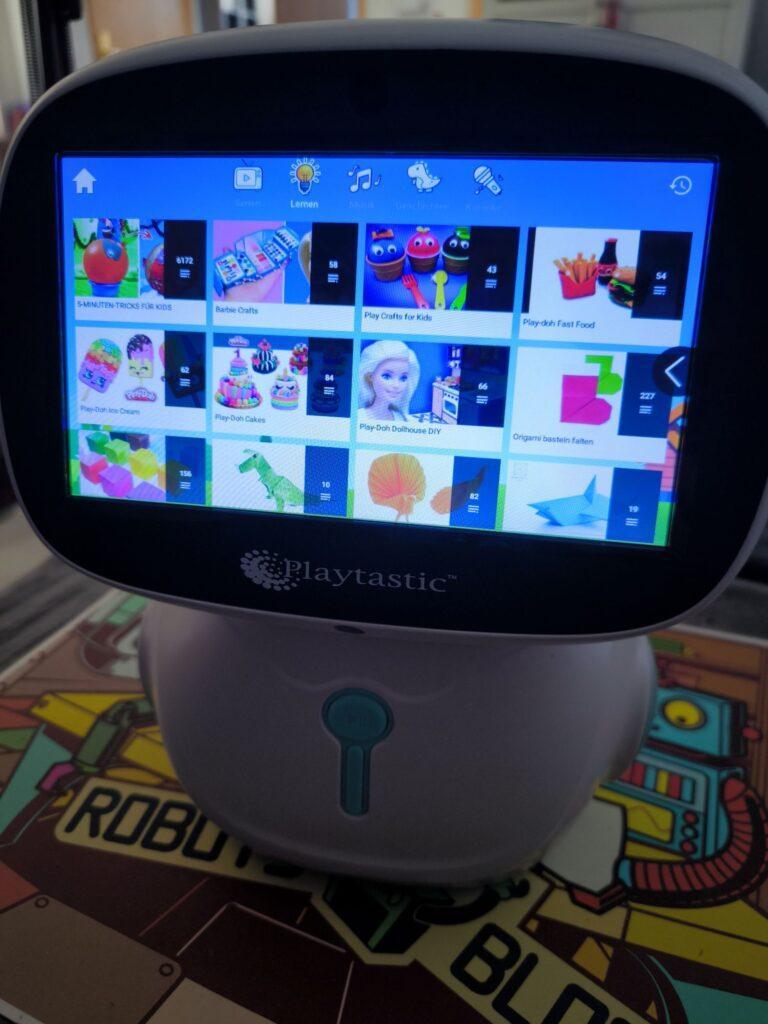
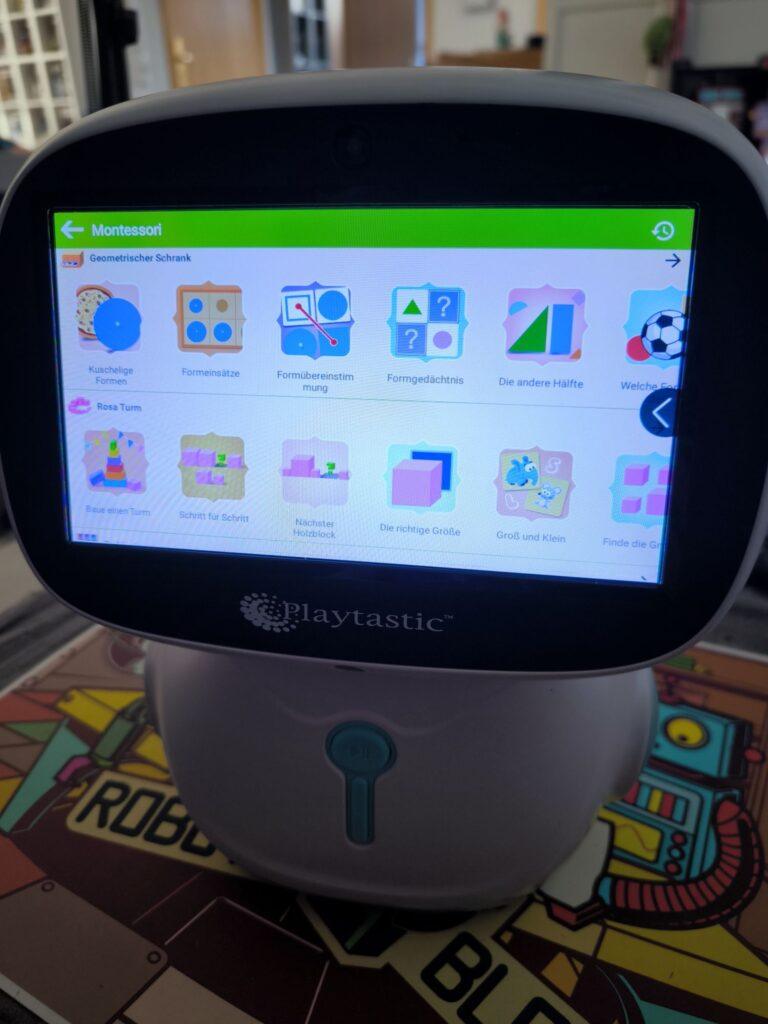
In der KinderFernsehen-App finden sich bekannte Videoreihen (wie Shaun das Schaf), Musik- und Lerninhalte sowie Spiele. Außerhalb dieser App gibt es die üblichen Anwendungen wie Wecker, Stoppuhr oder Bildergalerie sowie diverse weitere Lern-Apps: Rechnen, Malen, Schreiben, Musizieren oder Sprachen lernen – für fast alles gibt es eine App. Und wenn nicht, bietet der „Kinderladen“ eine abgespeckte Version des App-Stores mit Spielen, Lern-Apps und anderen kinderfreundlichen Inhalten. Ein Tablet-Karaoke-Musik-Video-Lern-Roboter also! Andere Android-Apps lassen sich hier jedoch nicht finden. Mir ist es auch nicht gelungen, fremde Apps zu installieren – weder per SD-Karte noch per Browser-Download –, da der integrierte Browser nur vorher freigegebene Webseiten öffnet. Wie man diese hinzufügt, habe ich nicht herausgefunden. Im PIN-geschützten „Elternmodus“ konnte ich zwar installierte Apps ausblenden (quasi vor Kindern verstecken), aber keine neuen Apps „sideloaden“. Es gibt einen erweiterten Modus, der nach mehrfachem Tippen auf die Versionsnummer des Roboters in den Einstellungen erscheint – leider geschützt durch ein mir unbekanntes Passwort. Was sich wohl dahinter verbirgt? Vielleicht die Möglichkeit zum Installieren eigener Apps?
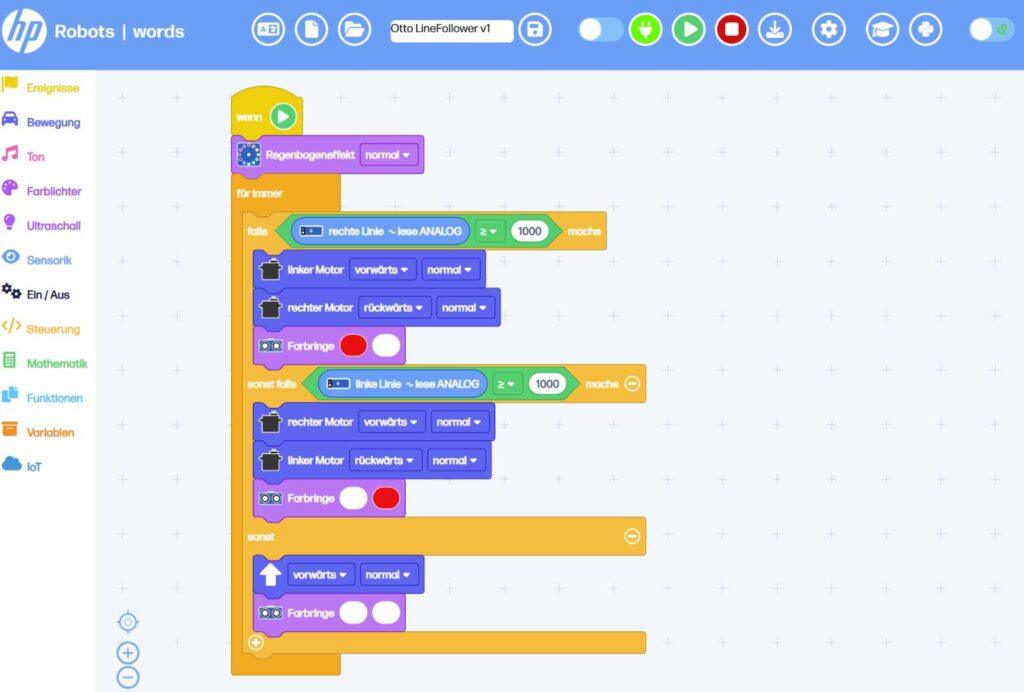
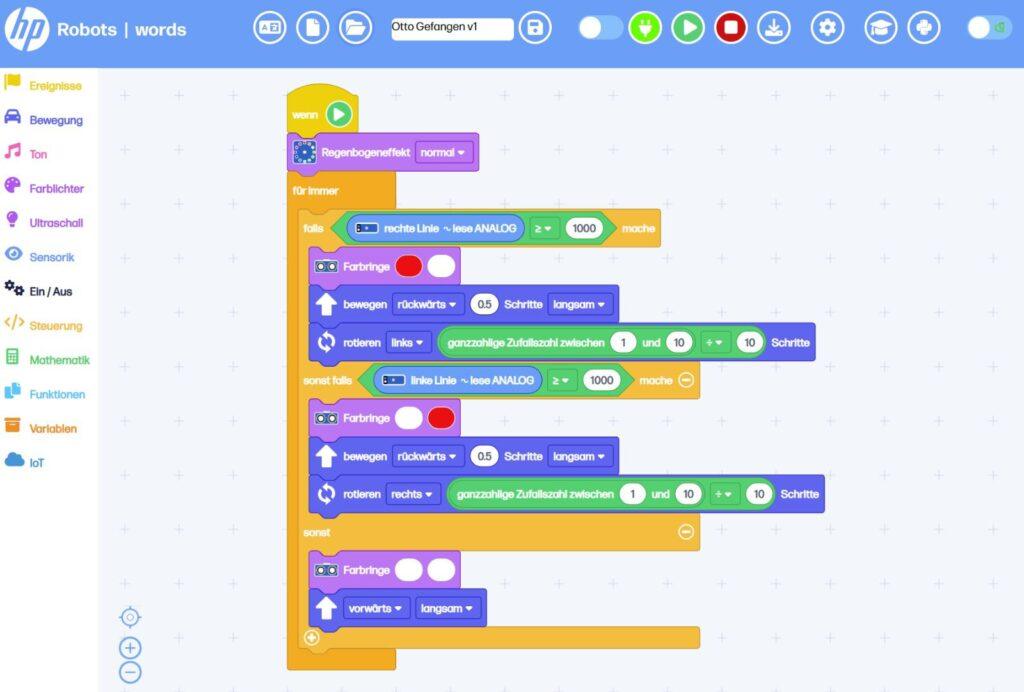
Die App „Musik und Tanz“ öffnet einen Musikplayer, mit dem MP3s – auch von einer eingesteckten SD-Karte – abgespielt werden können. Der Unterschied zur normalen „Musik“-App: Der Roboter tanzt zur abgespielten Musik und fährt mehr oder weniger wild „tanzend“ durch die Gegend. Ich hätte mir an dieser Stelle gewünscht, eigene Bewegungsabläufe programmieren zu können – oder sogar eine Lern-App, die mir das Programmieren des Roboters beibringt und die Möglichkeiten der integrierten Motoren meines „Roboter-Tablets“ nutzbar macht. Vielleicht sogar in Kombination mit der integrierten Kamera einen Linienfolger programmieren? Vielleicht wird hierfür ja irgendwann noch eine passende App entwickelt.
Die integrierte Kamera lässt sich zum Aufnehmen von Fotos und Videos in niedriger Auflösung nutzen. Leider habe ich keine App gefunden, die die Kamera für Bewegungsspiele nutzt – so wie beim Miko 3-Roboter bekannt. Vielleicht dürfen wir auch hier noch auf Erweiterungen per App hoffen?
Und dann gibt es noch den ChatGPT-Assistenten-Modus: Auf dem Display erscheint ein Robotergesicht, mit dem man sich auch ohne eingestecktes Mikrofon unterhalten kann. Die Antworten kommen dabei nach etwas Verzögerung von einer ChatGPT-Instanz. Diese scheint auf Unterhaltungen mit Kindern spezialisiert zu sein und schlägt automatisch Themen wie Dinosaurier, Weltraum oder Tiere vor. Jede Antwort liefert direkt Ideen für neue Nachfragen oder Themenvorschläge und führt so aktiv durch das Gespräch. Die ChatGPT-Instanz hat keinen Zugriff auf aktuelle Online-Inhalte und ist ausreichend moderiert: Nicht kindgerechte Themen werden in vielen Fällen ignoriert oder übergangen. Zu genaue Nachfragen oder geschicktes Prompting können jedoch manchmal zumindest fragwürdige Inhalte liefern – allerdings bleiben aktiv vorgeschlagene Themen stets kindgerecht (besonders gerne Dinosaurier). Auch Rekorde aus der Tierwelt oder Umweltphänomene werden als Gesprächsthemen vorgeschlagen.
Ein Tablet-Karaoke-Musik-Video-Lern-KI-Assistenten-Roboter.
Der Roboter ist ein vielseitiges Spielzeug mit gut funktionierenden vorinstallierten Apps. Für Erwachsene gibt es nur wenige Inhalte; diese sind hier aber definitiv nicht die Zielgruppe. Als auffälliger Spotify-Player mit einigen Zusatzfeatures ist der Roboter jedoch auch für Erwachsene interessant – erwartet aber keine Höchstleistung vom integrierten Tablet! Es ist eindeutig nur für die mitgelieferten Apps ausgelegt; diese sind dafür kindgerecht und sicher … solange man keine allzu neugierigen Fragen an den ChatGPT-Assistenten stellt. Insgesamt handelt es sich um ein lehrreiches Spielzeug für Kinder – auch um erste Erfahrungen im Umgang mit KI zu sammeln. Für den Preis bekommt man sonst nur ein günstiges Tablet; hier gibt es jedoch gleich einen ganzen Roboter dazu!






Die Welt der Robotik ist in Bewegung – und mittendrin: pib. Der humanoide Roboter, der komplett im 3D-Druckverfahren hergestellt werden kann, hat eine besondere Auszeichnung erhalten. Der German Design Award 2025 geht an den printable intelligent bot und würdigt damit nicht nur seine technologische Raffinesse, sondern auch sein innovatives Design. Doch was macht pib so besonders?
Ein Roboter für alle – und von allen
Stellt euch einen Roboter vor, den jeder selbst bauen und programmieren kann. Einen Roboter, der nicht nur als technisches Gadget existiert, sondern Menschen inspiriert, selbst zu gestalten, zu forschen und neue Wege in der Robotik zu gehen. Genau das ist pib. Sein Open-Source Ansatz hat ein zentrales Ziel: den Zugang zu Robotik und KI zu vereinfachen und technologische Hürden abzubauen. Ob Tüftler, Studierende oder Technikbegeisterte – pib lädt alle ein, Teil seiner stetig wachsenden Community zu werden.
German Design Award 2025: Anerkennung für visionäres Produktdesign

Der German Design Award gilt als eine der renommiertesten Auszeichnungen für herausragendes Design. Jährlich prämiert eine internationale Expertenjury innovative Konzepte in den Bereichen Produktdesign, Kommunikation und Architektur. In diesem Jahr überzeugte pib mit seinem „Excellent Product Design“ in der Kategorie „AI in Product Design Processes“ – eine Bestätigung dafür, dass Technologie und Ästhetik Hand in Hand gehen können.
Technologie trifft auf Kreativität
pib ist mehr als ein Roboter – er ist eine Plattform für innovative Technologien. Das Projekt ermöglicht es Neugierigen, spielerisch und praxisnah mit 3D-Druck, Robotik und künstlicher Intelligenz zu experimentieren. Dabei sind Vorkenntnisse keine Voraussetzung. Jeder kann sich einbringen, mitgestalten und lernen. Die Community spielt eine entscheidende Rolle: So stammt auch das neu designte, an menschliche Formen angepasste Gehäuse, das nun mit dem German Design Award ausgezeichnet wurde, aus der Feder eines Community-Mitglieds.
Jürgen Baier, Gründer von pib, freut sich über die Anerkennung: „Wir sind stolz, dass pib den German Design Award gewonnen hat! Für uns bedeutet dies, dass wir auf dem richtigen Weg sind, den Zugang zu Technologien wie Robotik und KI für alle einfacher und greifbarer zu machen. Es ist toll zu sehen, dass unsere Vision, Menschen zum Selbergestalten und Forschen zu inspirieren, so gut ankommt.“
Lernen mit pib: Schulen und Medienzentren setzen auf den humanoiden Roboter
Doch nicht nur in der Maker-Community sorgt pib für Begeisterung. Auch in über 35 Schulen und Medienzentren kommt er als innovative Lernplattform zum Einsatz. Schülerinnen und Schüler nutzen den humanoiden Roboter, um interaktiv und praxisnah Zukunftstechnologien zu erforschen. Dabei geht es nicht nur um technische Fähigkeiten, sondern auch um kreatives Problemlösen und Teamarbeit. Die praxisnahe Vermittlung von Wissen macht Robotik und KI greifbar – und öffnet damit Türen zu den Berufen von morgen.
Open Source und grenzenlose Möglichkeiten
Hinter pib steht die Nürnberger isento GmbH, ein Unternehmen, das sich auf Softwareentwicklung und KI-Lösungen spezialisiert hat. Doch der Roboter lebt nicht nur durch die Arbeit der isento-Mitarbeitenden, sondern vor allem durch die Beteiligung der Community. 3D-Druckdaten, detaillierte Bauanleitungen, Programmcode, KI-Skills und eine Wissensdatenbank stehen online zur freien Verfügung – eine Einladung an alle, die Zukunft der Robotik mitzugestalten.
Mit dem Gewinn des German Design Award erhält pib eine verdiente Würdigung. Doch für das Projekt bedeutet diese Auszeichnung weit mehr: Sie ist ein Ansporn, die Grenzen dessen, was mit Open-Source-Robotik möglich ist, weiter zu verschieben. Wer sich also schon immer gefragt hat, wie man selbst einen humanoiden Roboter erschaffen kann – pib gibt die Antwort.
MONTREAL, 4. Februar 2025 /PRNewswire/ — Vention, Anbieter der weltweit einzigen durchgängigen Automatisierungsplattform für Software und Hardware, hat seinen beliebten Online-Marketplace um ein erweitertes Sortiment und ein optimiertes Nutzererlebnis ergänzt. Damit wird es für Unternehmen noch einfacher, Plug-and-Play-Automatisierungskomponenten zu finden und zu integrieren.
Die im Vention Marketplace verfügbaren Produkte werden entweder von Vention selbst entwickelt und produziert oder sorgfältig kuratiert und für nahtlose Kompatibilität zertifiziert. Die Anzahl der Partner mit kompatiblen Komponenten hat sich jüngst verdoppelt – mehr als 200 zertifizierte Produkte von Partnerunternehmen sind nun verfügbar.
Seit der Einführung im Jahr 2019 umfasst der Vention Marketplace mittlerweile 25 Produktkategorien. Neue Funktionen wie verbesserte Vergleichstools, optimierte Navigation sowie transparente Preise und Lieferzeiten machen den Einkaufsprozess noch einfacher. Eine vollständige Liste der Vention Marketplace-Partner ist unter Vention.io/marketplace verfügbar.
„Der Vention Marketplace gehört bereits zu den führenden Online-Stores für Automatisierungslösungen – und jetzt wird er noch besser. Durch die Erweiterung unseres Partnernetzwerks erleichtern wir es Unternehmen, kompatible Automatisierungskomponenten schneller und effizienter zu finden, zu kaufen und zu integrieren“, sagt Etienne Lacroix, Gründer und CEO von Vention.
Alle im Marketplace erhältlichen Produkte sind auch in der kostenlosen Drag-and-Drop-Software MachineBuilder™ von Vention verfügbar. Dort können Anwender einen digitalen Zwilling ihrer Lösung entwerfen, Funktionen programmieren und testen sowie das komplette System mit wenigen Klicks bestellen und in Betrieb nehmen. Im Jahr 2024 wurden über 63.000 Designs von Nutzern erstellt.
Kompatible Automatisierungskomponenten jetzt noch einfacher finden
Der Kauf von Automatisierungskomponenten kann für Produktionsbetriebe und Einkaufsabteilungen eine Herausforderung sein – vor allem, wenn es um die Kompatibilität und Integration in bestehende Fertigungssysteme geht.
Der Vention Marketplace wurde entwickelt, um diese Integrationshürden zu beseitigen. Mit seinem Plug-and-Play-Ökosystem ermöglicht er eine schnelle und reibungslose Umsetzung von Automatisierungsprojekten. Vention erweitert kontinuierlich sein Partnernetzwerk und zertifiziert neue Komponenten für eine nahtlose Kompatibilität mit seinem immer beliebter werdenden Hardware-Ökosystem.
Die neue Kampagne zum Vention Marketplace – „Hier ist alles kompatibel.“ – hebt die einfache Anwendung für Ingenieure, Einkäufer und Produktionsverantwortliche hervor.
Köln, 28. Januar 2025 – Roboter werden in immer mehr Bereichen eingesetzt, von der Produktion in Fabriken bis hin zur Pflege von älteren Menschen. Um Unternehmen jeder Größe zu ermöglichen, das volle Potenzial von Automationslösungen auszuschöpfen und so wettbewerbsfähiger zu werden, eröffnet igus jetzt die RBTX Academy. Hier können Interessierte direkt an echten Robotern arbeiten, um die Grundlagen der Robotertechnik zu erlernen oder ihre Fähigkeiten in der Roboterprogrammierung zu vertiefen. Zum ersten Mal öffnete die RBTX Academy ihre Pforten am 25. Januar als igus auf dem Werksgelände in Köln Porz-Lind die Generalprobe für den RoboCup Junior 2025 veranstaltete – einer der bekanntesten und größten Robotik-Wettbewerbe für Schülerinnen und Schüler weltweit.

Roboter sind immer weniger Privileg von Großunternehmen mit ausreichend Know-how und Budget. Auch kleinen und mittelständischen Unternehmen gelingt die Automations-Transformation dank des Marktplatzes RBTX von igus, der kostengünstige und schlüsselfertige Robotiklösungen bietet. Um Betrieben den Einsatz solcher Lösungen weiter zu vereinfachen, hat igus am 25. Januar 2025 die RBTX Academy eröffnet. „Kunden, die einen Low-Cost-Roboter über unseren Marktplatz kaufen, können ab sofort Schulungen buchen, um die Roboterprogrammierung von Grund auf zu erlernen oder ihre Fähigkeiten weiter zu vertiefen“, sagt Alexander Mühlens, Prokurist und Leiter Geschäftsbereich Low-Cost-Automation bei igus. „Die praxisnahen Trainings finden bei uns in Köln in kleinen Gruppen in familiärer Atmosphäre statt und sind auf die individuellen Bedürfnisse der Teilnehmenden zugeschnitten, um größtmöglichen Nutzen zu bieten. Wir werden das Angebot zudem an weiteren Standorten wie München und Osnabrück sowie international in Ländern wie den USA, China, Großbritannien, Italien und Spanien ausrollen.“ Interessenten können sich ab sofort über die Website von igus anmelden. Zeitgleich fand die Generalprobe für den RoboCup Junior 2025 statt, dessen Besucherinnen und Besucher die Academy bereits kennenlernen konnten. igus gibt mit der Generalprobe Schülerinnen und Schülern die Möglichkeit, ihre selbstentwickelten Roboter in einer Wettkampfsituation zu testen, bevor es zum NRW-Qualifikationsturnier geht. Robotik-Experten von igus stehen ihnen zur Seite, um letzte technische Fehler zu finden und Optimierungen vorzunehmen.

In den praxisnahen Schulungen der RBTX Academy lernen die Teilnehmenden zum Beispiel den Umgang mit der Steuerungssoftware igus Robot Control. Die Software erstellt einen virtuellen Zwilling des Roboters, der in Echtzeit Bewegungen und Aktionen simuliert. So lassen sich über eine benutzerfreundliche Oberfläche Bewegungsabläufe planen, testen und optimieren. Die Programme können dann im nächsten Schritt an den realen Roboter übertragen werden, der die Aufgaben präzise ausführt – etwa am Gelenkarmroboter ReBeL Cobot, der zu einem Großteil aus Hochleistungskunststoff gefertigt ist und dadurch nur 4.970 Euro kostet. „Diese Methode ermöglicht eine effiziente Automatisierung selbst für Einsteiger. Sie können die ersten einfachen Bewegungsabläufe in der Regel innerhalb einer Stunde erstellen“, so Mühlens. Igus bietet aber auch Expertentrainings an, um tiefer in die Programmierung einzusteigen. „Teilnehmende lernen dadurch beispielsweise, Low-Cost-Roboter in komplexe Automationsumgebungen einzubinden und mit anderen Systemen interagieren zu lassen.“ Neben der igus Robot Control können die Kursteilnehmenden dabei auch mit Steuerungen anderer Hersteller trainieren – darunter Epson, Universal Robot und Dobot.

Während des Trainings haben sie zudem die Möglichkeit, die 400 Quadratmeter große Customer Testing Area zu besuchen. Dort präsentiert igus eine Auswahl an Robotik-Anwendungen mit Produkten von über 130 führenden Herstellern, die sich auch online auf dem RBTX-Marktplatz finden. Denn ein Roboter allein macht noch keine fertige Lösung. Von Pick-and-Place am Förderband mit einem SCARA-Roboter über Klebe-Arbeiten mit einem Portalroboter bis hin zum ReBeL Cobot als Barista können Besucher verschiedenste Anwendungsfälle vor Ort erleben. Die Besonderheit: Alle Komponenten auf RBTX.com werden vorab miteinander kombiniert und Kompatibilitätstests durchgeführt, sodass Anwender bei jeder Konfiguration auf der sicheren Seite sind und die passende Lösung für ihre individuelle Anwendung finden. „Unser Motto lautet dabei: ‚Automatisiere deine Fabrik ab 2.000 Euro“. Heißt, wir fokussieren uns stets auf bezahlbare Robotiklösungen“, betont Mühlens.
Embodied, the creators of Moxie, have announced significant updates for the Moxie community as they transition away from cloud-based services. Below is a summary of the key points:
1. OpenMoxie Release
Embodied has launched **OpenMoxie**, a locally hosted solution that allows users to operate Moxie independently of Embodied’s cloud servers. This ensures that Moxie can continue functioning in home environments even after Embodied’s cloud operations cease by **January 30th**.
Action Required: To use OpenMoxie, users must update their Moxie with the latest Over-The-Air (OTA) update and follow the instructions in the OpenMoxie Setup Guide.

2. Critical OTA Update (v.24.10.803)
The latest OTA update, version 24.10.803, is essential to ensure compatibility with OpenMoxie. Users who haven’t already updated their Moxie should do so immediately.
Steps to update:
1. Power on Moxie and connect it to local Wi-Fi.
2. Allow up to one hour for the download and installation process.
3. Reboot Moxie after installation is complete.
3. Embodied’s Ongoing Mission
While Embodied continues to search for a long-term solution for Moxie, they have no new updates regarding its future. However, OpenMoxie provides a way for users to maintain their connection with Moxie in a cloud-free environment.
The company expressed gratitude to its community for their unwavering support and emphasized pride in creating a path forward for Moxie’s continued use.

Legal and Regulatory Disclaimer
Embodied has outlined several disclaimers regarding the use of OpenMoxie:
– **No Guarantees or Warranties:** The functionality, security, or reliability of OpenMoxie is not guaranteed. Users assume full responsibility for its implementation and operation.
– **Community-Driven and Unsupported:** OpenMoxie is provided „as is,“ with no technical support, updates, or maintenance from Embodied.
– **Regulatory Compliance:** Users are responsible for ensuring compliance with applicable laws and regulations when using or modifying OpenMoxie.
– **No Ongoing Obligations:** Embodied has no obligation to continue supporting or maintaining Moxie or its services; all future efforts will be community-led.
Conclusion
The release of OpenMoxie marks an important step in preserving the functionality of Moxie as Embodied winds down its cloud operations. While this transition places responsibility on users and the community, it offers a way to keep Moxie’s unique companionship alive in a self-hosted environment.
UPDATE YOUR MOXIE NOW (before update servers are shut down on 30.01.2025l
For detailed instructions on installing and running OpenMoxie, please see the OpenMoxie Setup Guide at this link.
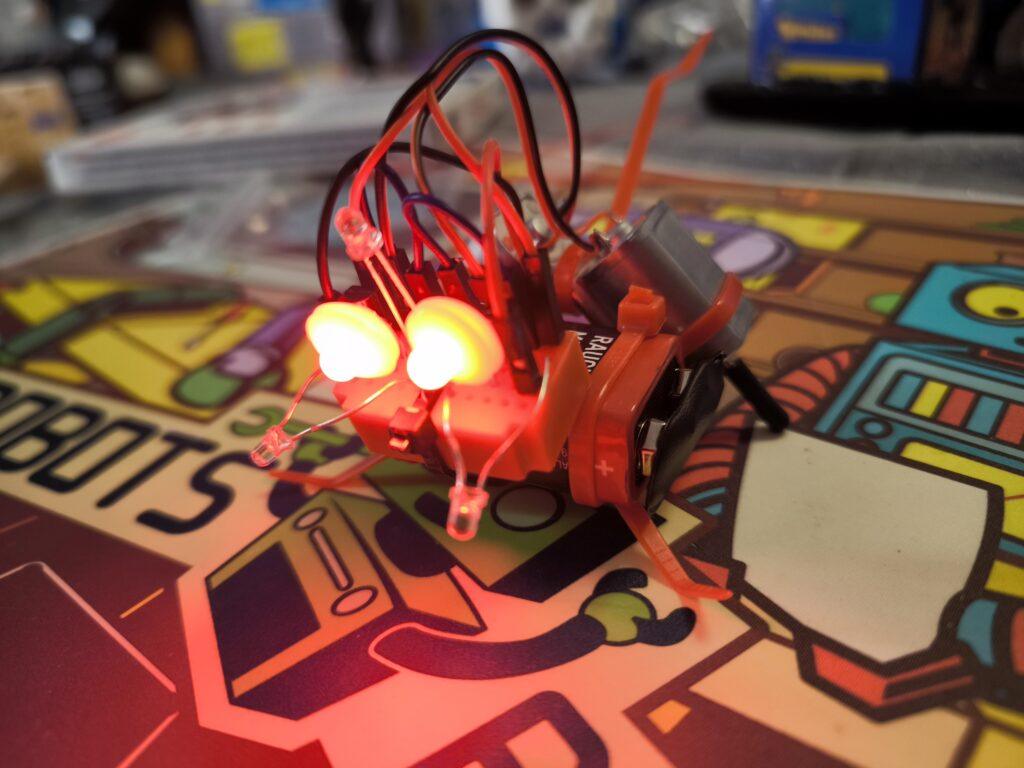
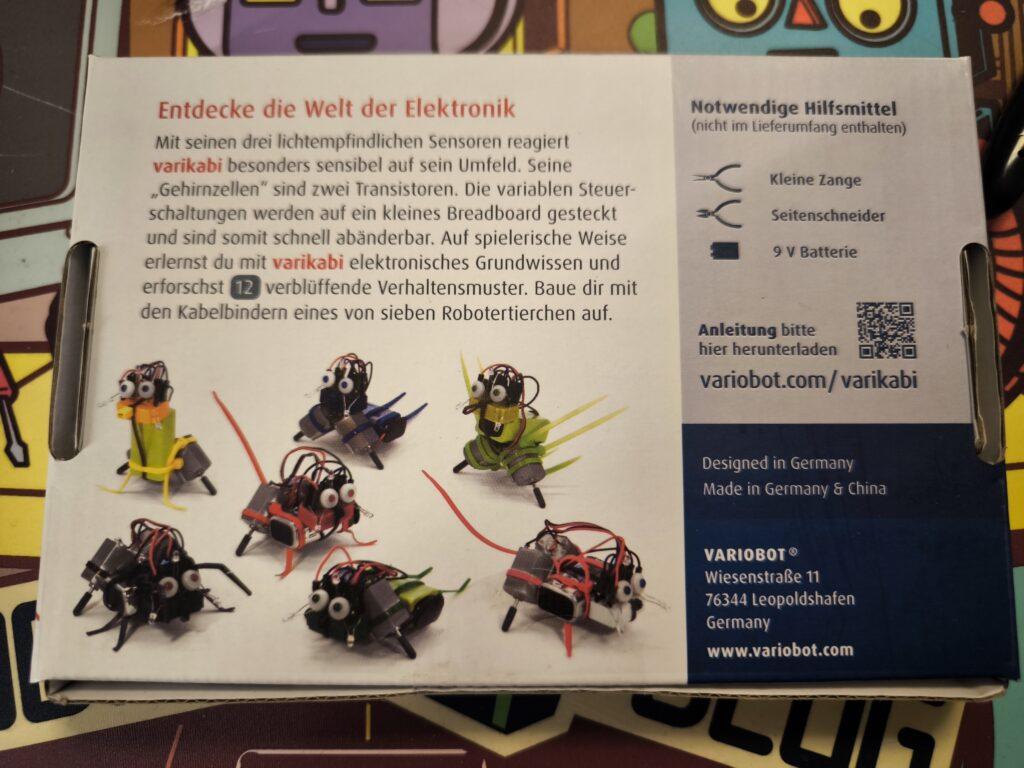
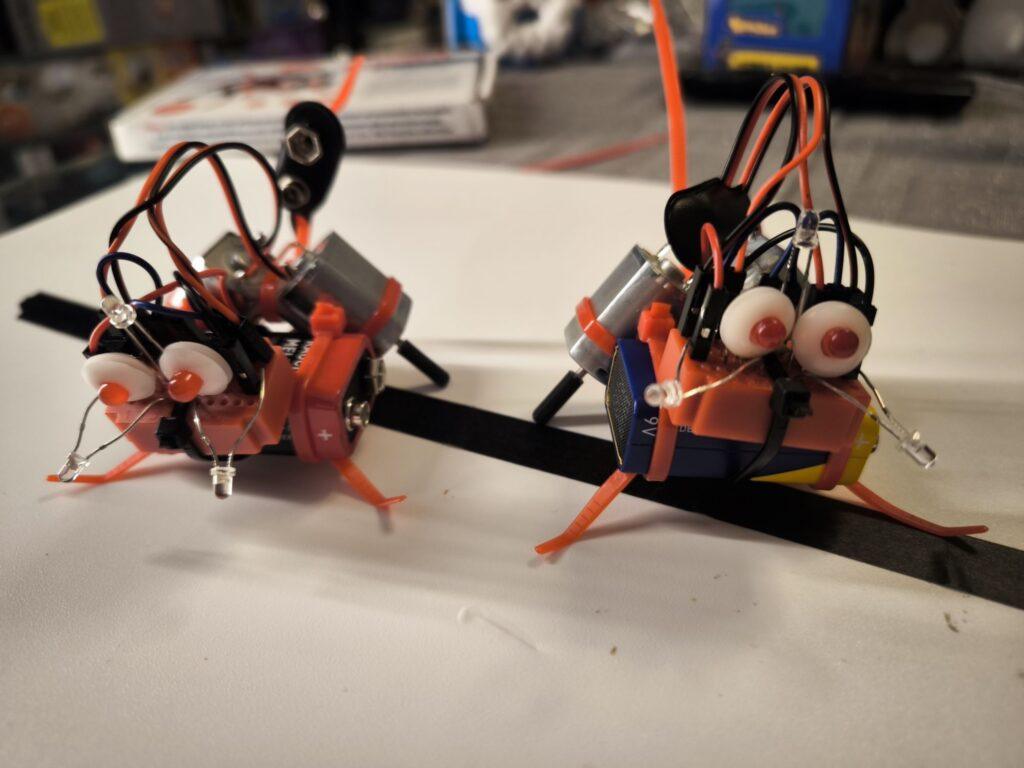
Der VARIOBOT varikabi Steckbausatz ist ein innovatives, analoges Mini-Roboter-Kit, das entwickelt wurde, um Kindern und Jugendlichen ab 8 Jahren einen spielerischen und lehrreichen Einstieg in die Welt der Elektronik und Robotik zu ermöglichen. Dieser in Deutschland entwickelte und produzierte Bausatz zeichnet sich durch seine Vielseitigkeit, einfache Handhabung und pädagogischen Wert aus.
Der varikabi ist mit drei hochsensiblen Lichtsensoren ausgestattet. Diese Sensoren können selbst kleinste Helligkeitsunterschiede wahrnehmen, was dem Roboter eine präzise Reaktion auf seine Umgebung ermöglicht.
Ein besonderes Merkmal des varikabi ist seine analoge Steuerung. Im Gegensatz zu vielen modernen Roboter-Kits, die auf digitale Programmierung setzen, funktioniert der varikabi über eine einfache analoge Schaltung mit nur zwei Transistoren. Dies macht den Bausatz besonders geeignet für Einsteiger, da keine Programmierkenntnisse erforderlich sind. Gleichzeitig vermittelt es grundlegende Prinzipien der Elektronik auf anschauliche Weise.
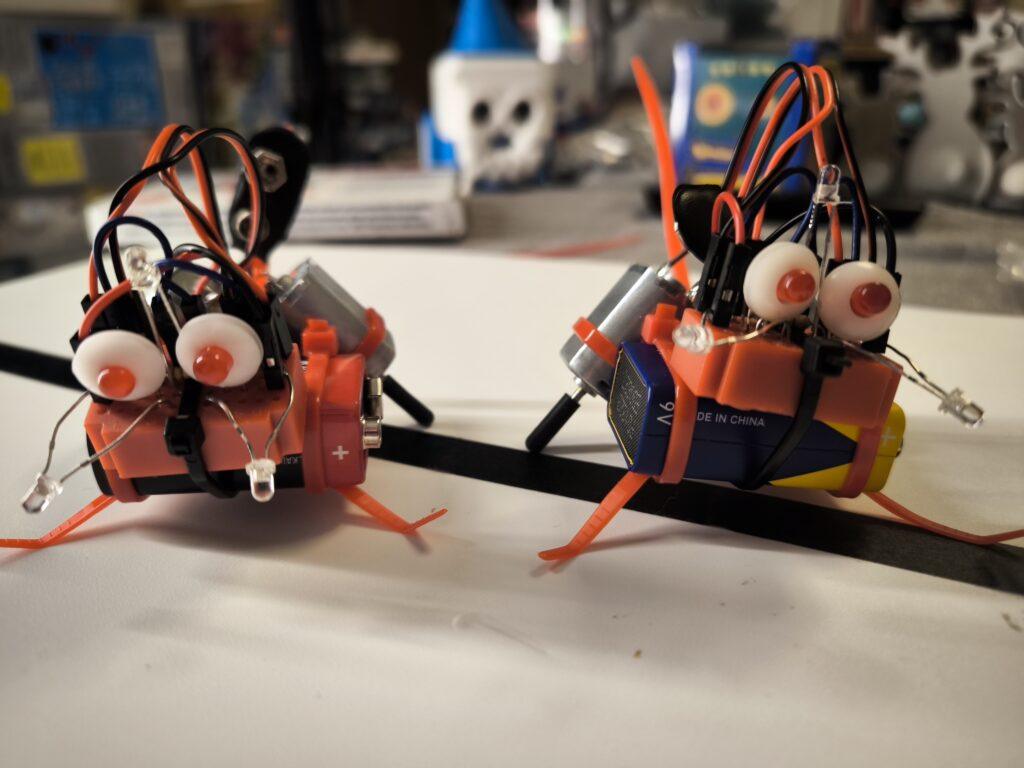
Der varikabi kann 12 verschiedene Verhaltensweisen zeigen, die durch einfache Umstellungen der Steckverbindungen aktiviert werden können:
Der varikabi kann in sieben verschiedenen Konfigurationen zusammengebaut werden:
Jedes Tier hat seine eigene Farbe, achtet beim Bestellen also darauf, welches Tier ihr genau bauen möchtet!
Der varikabi ist als Steckbausatz konzipiert, was bedeutet, dass alle Teile ohne Löten zusammengesteckt werden können. Dies macht den Bausatz sicher und einfach in der Handhabung, selbst für jüngere Kinder. Für den Aufbau werden lediglich eine kleine Zange und ein Seitenschneider benötigt.
Zum Betrieb des Roboters wird eine 9V-Batterie benötigt, die nicht im Lieferumfang enthalten ist. Mit einer Batterie kann der varikabi bis zu 12 Stunden lang betrieben werden, was für ausgiebiges Experimentieren und Spielen sorgt.
Der varikabi wurde mit dem renommierten „spiel gut“-Siegel ausgezeichnet. Diese Auszeichnung unterstreicht den hohen pädagogischen Wert des Bausatzes und bestätigt seine Eignung als lehrreiches Spielzeug.
Der Bausatz eignet sich hervorragend zur Förderung von MINT-Fähigkeiten (Mathematik, Informatik, Naturwissenschaften und Technik). Durch den praktischen Umgang mit dem varikabi lernen Kinder grundlegende Konzepte der Elektronik, Mechanik und Robotik kennen. Erlernte analoge Schaltungen lassen sich später mit einem anderen digitalen, programmierbaren Robotersystem nachstellen und in Code übertragen.

Neben dem Standardmodell gibt es auch eine Variante namens varikabi FT, die mit Fischertechnik-Bausteinen kompatibel ist. Dies eröffnet zusätzliche Möglichkeiten zur Erweiterung und Anpassung des Roboters.
VARIOBOT bietet verschiedene Zubehör- und Ersatzteile an, um den Roboter zu erweitern oder bei Bedarf zu reparieren. Dies verlängert die Nutzungsdauer und ermöglicht kontinuierliches Lernen und Experimentieren.
Der VARIOBOT varikabi Steckbausatz ist ein durchdachtes, vielseitiges und pädagogisch wertvolles Produkt, das Kindern und Jugendlichen einen spannenden Einstieg in die Welt der Robotik und Elektronik bietet. Durch seine analoge Funktionsweise, die einfache Montage und die Vielzahl an Konfigurationsmöglichkeiten fördert er nicht nur technisches Verständnis, sondern auch Kreativität und problemlösendes Denken. Als in Deutschland entwickeltes und produziertes Produkt steht der varikabi zudem für Qualität und Nachhaltigkeit im Bildungsspielzeugbereich.




Interaktiver KI-Berater nutzt Anwendungsdatenbank und verkürzt die Suche nach Komponenten für kostengünstige Roboterlösungen

Köln, 11. Dezember 2024 – igus hat die Online-Plattform RBTX.com um einen neuen KI-Chatbot erweitert. Der interaktive Berater soll es Unternehmen mit wenig Vorerfahrung und technologischem Know-how ermöglichen, schnell und sicher Low-Cost-Automationslösungen zusammenzustellen, um ihre Wettbewerbsfähigkeit zu stärken. Erste User zeigen sich von der intuitiven KI-Lösung begeistert.
Viele Unternehmen wissen bereits, dass Automation enorme Potenziale bietet, um den Herausforderungen einer sich schnell verändernden Arbeitswelt zu begegnen. Doch die entscheidende Frage bleibt: Wie setzt man sie um? RBTX liefert die Antwort: Auf dem Online-Marktplatz finden sich über 500 Roboterlösungen, von denen 95 Prozent weniger als 12.000 Euro kosten. Hier können auch Unternehmen ohne Vorkenntnisse in der Robotik kostengünstige Low-Cost-Automation-Lösungen (LCA) nach dem Plug-and-Programme-Prinzip zusammenstellen. „Mit RBTX wollen wir Schritt für Schritt alle Barrieren aus dem Weg räumen, die Unternehmen beim Einstieg in die Automation im Weg liegen“, sagt Alexander Mühlens, Prokurist und Leiter Geschäftsbereich Low-Cost-Automation bei igus. Entscheidend ist hier beispielsweise, für eine garantierte Interoperabilität aller angebotenen Komponenten zu sorgen, die Fehlkäufe nahezu unmöglich macht. „Ein weiterer Schritt auf diesem Weg ist nun die Einführung eines neuen KI-Beraters, der mit Interessierten in Interaktion tritt, um die Suche nach Komponenten in einem immer größer werdenden Sortiment zu verkürzen.“
Der neue KI-Chatbot auf https://chat.rbtx.de unterstützt Nutzer durch eine schriftliche Interaktion dabei, passende LCA-Komponenten zu finden. Dabei greift die Künstliche Intelligenz auf die Erfahrungsdaten von hunderten Projekten zurück, die Unternehmen mithilfe von RBTX bereits erfolgreich automatisiert haben. Entsprechend zielführend sind die Antworten. Ein Beispiel: Eine kleine Werkstatt leidet unter Arbeitskräftemangel und möchte die Beladung ihrer CNC-Maschine mit Rohlingen automatisieren. Der Technikleiter des Betriebs bemüht den neuen KI-Chatbot und stellt ihm die Frage: „Welcher Roboter eignet sich für die Beladung meiner CNC-Maschine?“ Innerhalb weniger Sekunden liefert die KI die Antwort: „Der robolink Roboterarm von igus wäre hier eine geeignete Lösung. Der Arm bewegt sich über fünf Achsen, hat eine Reichweite von 790 Millimetern, eine Geschwindigkeit von sieben Picks pro Minute und kann die Lage der Bauteile mithilfe einer 3D-Kamera wahrnehmen. Der Preis beginnt bei 2.766 Euro.“ Nach dieser Antwort fragt der Nutzer, welcher Greifer passend wäre. Der KI-Berater antwortet: „Ein Parallelgreifer von Zimmer wäre eine geeignete Wahl.“ In einem solchen natürlich anmutenden Dialog stellen sich Nutzer sukzessive ihre individuelle LCA-Lösung zusammen.
Unternehmen, die mit Automation experimentieren, geben sich vom neuen KI-Chatbot begeistert. „Viele Kunden haben uns bereits das Feedback gegeben, dass sie mit dem KI-Roboterberater in einen Dialog getreten sind. Er hat ihnen ein besseres Gespür für die Möglichkeiten der Low-Cost-Automation gegeben und die Suche nach den passenden Komponenten wesentlich beschleunigt“, freut sich Mühlens. „Wir planen deshalb, den KI-Berater in Zukunft um zusätzliche Funktionen zu erweitern.“ So soll es beispielsweise möglich sein, dass der Berater Bilder und Videomaterial von Referenzen in seine Antworten einbettet und LCA-Komplettlösungen mit einem Richtpreis entwickeln kann.