Auf der Hannover Messe 2022 stellt igus den ersten Prototypen eines humanoiden Low Cost Roboters vor
Köln, 27. Mai 2022 – Mensch, Maschine – oder beides? Humanoide Roboter sind längst nicht mehr nur Science-Fiction, sondern Realität. Auch igusforscht bereits seit einiger Zeit an humanoider Robotik und stellt nun auf der Hannover Messe einen Prototypen des motion plastics bot vor: ein humanoider Roboter, der die Vorteile von Hochleistungskunststoffen und Low Cost Automation vereint.
Roboter sind aus unserem Alltag nicht mehr wegzudenken. Spätestens seit dem Wandel zur Industrie 4.0 werden immer mehr Aufgaben automatisiert – und davon profitieren auch neue Formen der Robotik. Doch Roboter können nicht nur in der Industrie, sondern auch im Alltag für Erleichterung sorgen. Ein Humanoid, der nicht nur funktionell, sondern auch freundlich ist und menschliche Züge trägt, kann den Menschen nicht als Maschine, sondern als Partner begleiten. In der Forschung und Entwicklung von humanoider Robotik gibt es stetig Fortschritte. Zum Beispiel bei einem Forschungsteam der TU Chemnitz, das eine E-Skin entwickelt – eine berührungsempfindliche elektronische Haut, die humanoide Roboter noch menschenähnlicher machen könnte. Immer getrieben von der Frage, in welche Richtung sich die Robotik weiterentwickeln kann, arbeitet auch igus seit einiger Zeit an der eigenen Vision eines humanoiden Roboters – dem motion plastics bot. „Mit dem igus ReBeL und unserem drytech Angebot waren bereits passende Komponenten vorhanden, um Bewegung in einen Roboter zu bringen. Der humanoide Roboter ist ein gemeinsames Projekt mit den Robotik-Experten des Stuttgarter Start-ups TruPhysics, das den intelligenten Humanoiden aus unseren motion plastics sowie weiteren Komponenten zusammengebaut hat. Dort ist er unter dem Namen Robert M3 erhältlich”, erklärt Alexander Mühlens, Leiter Geschäftsbereich Automatisierungstechnik und Robotik bei igus. „Mit dem Bot wollen wir das Zusammenspiel von unseren Produkten aus Hochleistungskunststoffen und integrierter Intelligenz aufzeigen – und das zu einem erschwinglichen Preis.“
Leichter und wartungsfreier Low Cost Humanoid
Für eine lange und störungsfreie Laufzeit ohne Wartung bieten die Tribo-Polymere von igus im motion plastics bot einen klaren Vorteil: Schmiermittelfreiheit. Gleichzeitig ermöglichen die Hochleistungskunststoffe eine leichte Bauweise. Durch ihren Einsatz bringt der motion plastics bot bei einer Höhe von bis zu 2,70 Meter lediglich 78 Kilogramm auf die Waage. Seine Spannweite beträgt 1,50 Meter. Der motion plastics bot verfügt über ein selbstfahrendes AGV (Automated Guided Vehicle), einen teleskopierbaren Körper sowie einen Kopf mit integriertem Bildschirm und Avatar für eine interaktive Kommunikation. Zentraler Bestandteil ist auch der igus ReBeL, ein Serviceroboter mit Cobot-Fähigkeiten, der als Arme des Bots zum Einsatz kommt. Das Herzstück des ReBeLs sind die vollintegrierten Tribo-Wellgetriebe aus Kunststoff mit Motor, Absolutwert-Encoder, Kraftregelung und Controller. Der motion plastics bot bewegt sich in Schrittgeschwindigkeit und verfügt über eine Traglast von 2 Kilogramm pro Arm. Angesteuert wird er als Open Source-Lösung über das Robot Operating System (ROS). Denn das gesamte Low Cost Automation-Angebot von igus lässt sich in ROS abbilden. Mit der Studie zum motion plastics bot vereint igus die Vorteile seiner Hochleistungskunststoffe für die Bewegung und sein Know-how im Bereich Low Cost Automation, um die Entwicklung der nächsten Robotergeneration weiter voranzutreiben.
Lebenslanger Begleiter statt nur Maschine
„Wir sehen viel Potenzial im Einsatz von humanoiden Robotern. Doch unsere Welt ist von Menschen für Menschen gebaut. Statt nur einzelne Automatisierungsteile zu nutzen, ist es daher sinnvoll an Humanoiden und Androiden zu forschen. Die Frage ist, wann ist der Markt soweit?“, macht Alexander Mühlens deutlich. Menschenähnliche Roboter können sowohl gefährliche als auch einfache und monotone Aufgaben übernehmen.Im beruflichen Umfeld können Arbeiten erledigt werden, die über ein bloßes Pick & Place, wie es Roboterarme verrichten, hinausgehen. Im Haushaltsbereich kann ein Bot mehrere Roboter ersetzen: Er könnte selbstständig staubsaugen, Rasen mähen, Einkäufe erledigen, kochen, Wäsche waschen und darüber hinaus alle möglichen Aufgaben erledigen – selbst die Pflege von kranken Menschen. Somit wäre er nicht nur eine Maschine, sondern ein Begleiter, der für eine Menschenleben lange Erleichterung sorgen könnte. „Der Einsatz eines solchen Roboters ist bisher noch mit hohen Kosten verbunden, berücksichtigt man jedoch die mögliche Lebensdauer, würde sich der Einsatz längerfristig amortisieren”, sagt Mühlens. „Unser Ziel ist es, mit motion plastics Komponenten kostengünstige und einfache Lösungen für humanoide Robotik aufzuzeigen.”
GOLETA, Calif. and ORLANDO, Fla. ― Teledyne FLIR, part of Teledyne Technologies Incorporated, today announced the release of its high-performance Hadron 640R combined radiometric thermal and visible dual camera module. The Hadron 640R design is optimized for integration into unmanned aircraft systems (UAS), unmanned ground vehicles (UGV), robotic platforms, and emerging AI-ready applications where battery life and run time are mission critical.
The 640 x 512 resolution Boson longwave infrared (LWIR) thermal camera inside the Hadron 640R can see through total darkness, smoke, most fog, glare, and provide temperature measurements for every pixel in the scene. The addition of the high definition 64 MP visible camera enables the Hadron 640R to provide both thermal and visible imagery compatible with today’s on-device processors for AI and machine-learning applications at the edge.
“The Hadron 640R provides integrators the opportunity to deploy a high-performance dual-camera module into a variety of unmanned form factors from UAS to UGV thanks to its incredibly small size, weight, and power requirement,” said Michael Walters, vice president product management, Teledyne FLIR. “It is designed to maximize efficiency and its IP-54 rating protects the module from intrusion of dust and water from the outside environment.”
The Hadron 640R reduces development costs and time-to-market for integrators and original equipment manufacturer (OEM) product developers by offering a complete system through a single supplier, Teledyne FLIR. This includes offering drivers for market-leading processors from NVIDIA, Qualcomm, and more, plus industry-leading integration support and service from a support team of experts. It also offers flexible 60 Hz video output via USB or MIPI compatibility. Hadron 640R is a dual use product and is classified under US Department of Commerce jurisdiction.
The Teledyne FLIR Hadron 640R is available for purchase globally from Teledyne FLIR and its authorized dealers. To learn more or to purchase, visit www.flir.com/hadron640r.
For an exclusive in-person first look at the Hadron 640R, please visit booth #2107 at AUVSI Xponential, April 26-28, 2022, in Orlando, Florida.
About Teledyne FLIR Teledyne FLIR, a Teledyne Technologies company, is a world leader in intelligent sensing solutions for defense and industrial applications with approximately 4,000 employees worldwide. Founded in 1978, the company creates advanced technologies to help professionals make better, faster decisions that save lives and livelihoods. For more information, please visit www.teledyneflir.com or follow @flir.
About Teledyne Technologies Teledyne Technologies is a leading provider of sophisticated digital imaging products and software, instrumentation, aerospace and defense electronics, and engineered systems. Teledyne’s operations are primarily located in the United States, the United Kingdom, Canada, and Western and Northern Europe. For more information, visit Teledyne’s website at www.teledyne.com.
On-demand robot delivery now available in Pleasanton, CA at Lucky California flagship store
SAN FRANCISCO (February, 2022) – Starship Technologies, the world’s leading provider of autonomous delivery services, is now delivering groceries in the San Francisco Bay Area. Starship is expanding its partnership with The Save Mart Companies for the exclusive launch of an on-demand grocery delivery service at its Lucky California flagship store in Pleasanton, CA. Lucky is the first grocery store in the San Francisco Bay Area to partner with Starship.
Starship and The Save Mart Companies first partnered in September 2020, when the Save Mart flagship store in Modesto became the first grocery store in the U.S. to offer Starship robot delivery service. Since its launch, that store has expanded its delivery area to serve over 55,000 households. In Pleasanton, the service is launching to thousands of residents, with the delivery area expected to grow rapidly in the coming months, similar to Modesto.
“We are very pleased to bring the benefits of autonomous delivery to Pleasanton, in partnership with Lucky California,” said Ryan Tuohy, SVP of Sales and Business Development at Starship Technologies. “Since launching our service in Modesto in 2020, we’ve been excited to see the extremely positive reaction to the robots and how they were embraced as part of the local community. We think the residents of Pleasanton will appreciate the convenience and positive environmental impact of autonomous delivery and we fully expect the service area to quickly expand to more households.”
The robots, each of which can carry up to 20 pounds of groceries – the equivalent of about three shopping bags – provide a convenient, energy-efficient, and low-cost delivery alternative to driving to the Lucky California store, allowing shoppers to browse thousands of items via the secure Starship app for on-demand delivery straight to their home.
The robots travel autonomously – crossing streets, climbing curbs and traversing sidewalks – to provide on-demand delivery to shoppers. They often become local celebrities as community members share their robot selfies and “love notes” on social media.
“Since the debut of our contactless delivery service at the Save Mart flagship store, feedback from the Modesto community has been incredibly positive,” said Barbara Walker, senior vice president and chief marketing officer for The Save Mart Companies. “We are thrilled to expand this service to Lucky California in Pleasanton and offer a safe and efficient grocery delivery solution, along with some joyful entertainment, especially as the service area progressively expands over time..”
The Starship Food Delivery app is available for download on iOS and Android. To get started, customers choose from a range of their favorite groceries and drop a pin where they want their delivery to be sent. When an order is submitted, Lucky California team members gather the delivery items and carefully place them in a clean robot. Every robot’s interior and exterior is sanitized before each order. The customer can then watch as the robot makes its journey to them, via an interactive map. Once the robot arrives, the customer receives an alert, and can then meet the robot and unlock it through the app.
Starship already offers its services in many parts of the EU, UK and the US in cities, university campuses and industrial campuses, with further expansion planned in the near future. Starship is able to do L4 deliveries everywhere it operates – entire cities and campuses. The robots have been operating at L4 since 2018. On a daily basis Starship robots will complete numerous deliveries in a row 100% autonomously, including road crossings. This is why the cost of a Starship delivery is now lower than the human equivalent, which is believed to be a world first for any robot delivery company, whereas most others are still majority human controlled and in pilot mode.
Starship Technologies operates commercially on a daily basis around the world. Its zero-emission robots make more than 100,000 road crossings every day and have completed more than 2.5 million commercial deliveries and travelled more than 3 million miles (5 million+ kms) globally, more than any other autonomous delivery provider.
Autonomously driving robotic assistance system for the automated placement of coil creels
Due to the industry standard 4.0, digitalisation, automation and networking of systems and facilities are becoming the predominant topics in production and thus also in logistics. Industry 4.0 pursues the increasing optimisation of processes and workflows in favour of productivity and flexibility and thus the saving of time and costs. Robotic systems have become the driving force for automating processes. Through the Internet of Things (IoT), robots are becoming increasingly sensitive, autonomous, mobile and easier to operate. More and more they are becoming an everyday helper in factories and warehouses. Intelligent imaging techniques are playing an increasingly important role in this.
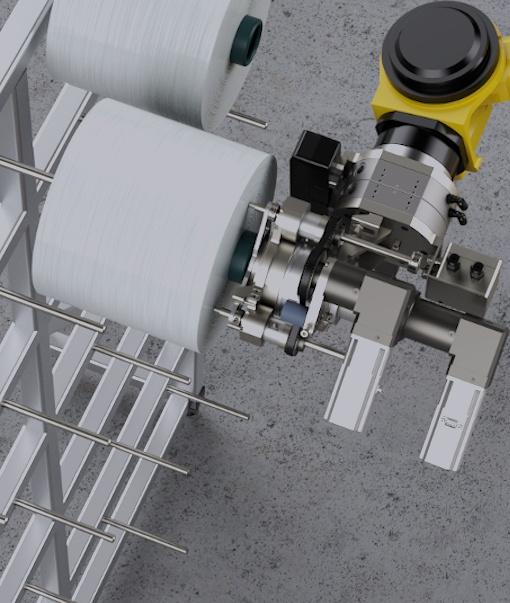
To meet the growing demands in scaling and changing production environments towards fully automated and intelligently networked production, the company ONTEC Automation GmbH from Naila in Bavaria has developed an autonomously driving robotic assistance system. The „Smart Robot Assistant“ uses the synergies of mobility and automation: it consists of a powerful and efficient intralogistics platform, a flexible robot arm and a robust 3D stereo camera system from the Ensenso N series by IDS Imaging Development Systems GmbH.
The solution is versatile and takes over monotonous, weighty set-up and placement tasks, for example. The autonomous transport system is suitable for floor-level lifting of Euro pallets up to container or industrial format as well as mesh pallets in various sizes with a maximum load of up to 1,200 kilograms. For a customer in the textile industry, the AGV (Automated Guided Vehicle) is used for the automated loading of coil creels. For this purpose, it picks up pallets with yarn spools, transports them to the designated creel and loads it for further processing. Using a specially developed gripper system, up to 1000 yarn packages per 8-hour shift are picked up and pushed onto a mandrel of the creel. The sizing scheme and the position of the coils are captured by an Ensenso 3D camera (N45 series) installed on the gripper arm.
Application
Pallets loaded with industrial yarn spools are picked up from the floor of a predefined storage place and transported to the creel location. There, the gripper positions itself vertically above the pallet. An image trigger is sent to the Ensenso 3D camera from the N45 series, triggered by the in-house software ONTEC SPSComm. It networks with the vehicle’s PLC and can thus read out and pass on data. In the application, SPSComm controls the communication between the software parts of the vehicle, gripper and camera. This way, the camera knows when the vehicle and the grabber are in position to take a picture. This takes an image and passes on a point cloud to a software solution from ONTEC based on the standard HALCON software, which reports the coordinates of the coils on the pallet to the robot. The robot can then accurately pick up the coils and process them further. As soon as the gripper has cleared a layer of the yarn spools, the Ensenso camera takes a picture of the packaging material lying between the yarn spools and provides point clouds of this as well. These point clouds are processed similarly to provide the robot with the information with which a needle gripper removes the intermediate layers. „This approach means that the number of layers and finishing patterns of the pallets do not have to be defined in advance and even incomplete pallets can be processed without any problems,“ explains Tim Böckel, software developer at ONTEC. „The gripper does not have to be converted for the use of the needle gripper. For this application, it has a normal gripping component for the coils and a needle gripping component for the intermediate layers.“
For this task, the mobile use for 3D acquisition of moving and static objects on the robot arm, the Ensenso 3D camera is suitable due to its compact design. The Ensenso N 45’s 3D stereo electronics are completely decoupled from the housing, allowing the use of a lightweight plastic composite as the housing material. The low weight facilitates the use on robot arms such as the Smart Robotic Asstistant. The camera can also cope with demanding environmental conditions. „Challenges with this application can be found primarily in the different lighting conditions that are evident in different rooms of the hall and at different times of the day,“ Tim Böckel describes the situation. Even in difficult lighting conditions, the integrated projector projects a high-contrast texture onto the object to be imaged by means of a pattern mask with a random dot pattern, thus supplementing the structures on featureless homogenous surfaces. This means that the integrated camera meets the requirements exactly. „By pre-configuring within NxView, the task was solved well.“ This sample programme with source code demonstrates the main functions of the NxLib library, which can be used to open one or more stereo and colour cameras whose image and depth data are visualised. Parameters such as exposure time, binning, AOI and depth measuring range can – as in this case – be adjusted live for the matching method used.
The matching process empowers the Ensenso 3D camera to recognise a very high number of pixels, including their position change, by means of the auxiliary structures projected onto the surface and to create complete, homogeneous depth information of the scene from this. This in turn ensures the necessary precision with which the Smart Robot Assistant proceeds. Other selection criteria for the camera were, among others, the standard vision interface Gigabit Ethernet and the global shutter 1.3 MP sensor. „The camera only takes one image pair of the entire pallet in favour of a faster throughput time, but it has to provide the coordinates from a relatively large distance with an accuracy in the millimetre range to enable the robot arm to grip precisely,“ explains Matthias Hofmann, IT specialist for application development at ONTEC. „We therefore need the high resolution of the camera to be able to safely record the edges of the coils with the 3D camera.“ The localisation of the edges is important in order to be able to pass on as accurate as possible the position from the centre of the spool to the gripper.
Furthermore, the camera is specially designed for use in harsh environmental conditions. It has a screwable GPIO connector for trigger and flash and is IP65/67 protected against dirt, dust, splash water or cleaning agents.
Software
The Ensenso SDK enables hand-eye calibration of the camera to the robot arm, allowing easy translation or displacement of coordinates using the robot pose. In addition, by using the internal camera settings, a „FileCam“ of the current situation is recorded at each pass, i.e. at each image trigger. This makes it possible to easily adjust any edge cases later on, in this application for example unexpected lighting conditions, obstacles in the image or also an unexpected positioning of the coils in the image. The Ensenso SDK also allows the internal camera LOG files to be stored and archived for possible evaluation.
ONTEC also uses these „FileCams“ to automatically check test cases and thus ensure the correct functioning of all arrangements when making adjustments to the vision software. In addition, various vehicles can be coordinated and logistical bottlenecks minimised on the basis of the control system specially developed by ONTEC. Different assistants can be navigated and act simultaneously in a very confined space. By using the industrial interface tool ONTEC SPSComm, even standard industrial robots can be safely integrated into the overall application and data can be exchanged between the different systems.
Outlook
Further development of the system is planned, among other things, in terms of navigation of the autonomous vehicle. „With regard to vehicle navigation for our AGV, the use of IDS cameras is very interesting. We are currently evaluating the use of the new Ensenso S series to enable the vehicle to react even more flexibly to obstacles, for example, classify them and possibly even drive around them,“ says Tim Böckel, software developer at ONTEC, outlining the next development step.
ONTEC’s own interface configuration already enables the system to be integrated into a wide variety of Industry 4.0 applications, while the modular structure of the autonomously moving robot solution leaves room for adaptation to a wide variety of tasks. In this way, it not only serves to increase efficiency and flexibility in production and logistics, but in many places also literally contributes to relieving the workload of employees.
Sophie writes on behalf of Panda Security covering cybersecurity and online safety best practices for consumers and families. Specifically, she is interested in removing the barriers of complicated cybersecurity topics and teaching data security in a way that is accessible to all. Her most recent piece is on the evolution of robotic dogs and where they're headed next.
Robots have been a point of fascination and study for centuries as researchers and inventors have sought to explore the potential for automated technology. While there’s a long history of the development and creation of autonomous machines, mobile, quadrupedal robots — or four-legged robotic dogs — have seen a significant boom in the last few decades.
The development of quadrupedal robots stems from the necessity of mobile robots in exploring dangerous or unstructured terrains. Compared to other mobile robots (like wheeled or bipedal/two-legged robots), quadrupedal robots are a superior locomotion system in terms of stability, control and speed.
The capabilities of quadrupedal robots are being explored in a variety of fields, from construction and entertainment to space exploration and military operations. Today, modern robotic dogs can be purchased by businesses and developers to complete tasks and explore environments deemed too dangerous for humans. Read on for the evolution of robotic dogs and where they might be headed in the future.
1966: Phony Pony
Although it technically mirrored the form of a horse, the Phony Pony was the first autonomous quadrupedal robot to emerge in the U.S. that set the precedent for robotic dogs of the future. Equipped with electrical motors, the Pony Pony had two degrees of freedom, or joints, in each leg (the hip and the knee) and one adaptive joint in the frontal plane. The hip and knee joints were identical, allowing for both forward and backward walking movements.
The Phony Pony was capable of crawling, walking and trotting, albeit at a very slow speed. Thanks to its spring-restrained “pelvic” structure, it was able to maintain static vertical stability during movement. Since the Phony Pony was developed before the advent of microprocessors, it could only be controlled through cables connected to a remote computer in an adjacent building.
Developer: Frank and McGhee
Use: Initial research and development of autonomous quadrupeds
1999: AIBO
In the late 1990s, Sony’s AIBO — one of the most iconic and advanced entertainment robotic dogs — hit the market. While the AIBO (Artificial Intelligence RoBOt) was constructed for entertainment purposes, its machinery is still highly complex.
Developed with touch, hearing, sight and balancing capabilities, it can respond to voice commands, shake hands, walk and chase a ball. It can also express six “emotions”: happiness, sadness, fear, anger, dislike and surprise. Its emotional state is expressed through tail wagging, eye color changes and body movements, as well as through a series of sounds including barks, whines and growls. Today, the AIBO has been used across many research groups for the purpose of testing artificial intelligence and sensory integration techniques.
Developer: Sony
Use: Toys and entertainment
2005: BigDog
Boston Dynamics has become a leader in the world of robotics, specifically in their development of canine-inspired quadrupeds. Their first robotic dog, coined BigDog, arrived in 2005. Measuring three by two feet and weighing in at 240 pounds, BigDog was designed to support soldiers in the military. It can carry 340 pounds, climb up and down 35-degree inclines and successfully hike over rough terrains.
Each of BigDog’s legs has a passive linear pneumatic compliance — a system that controls contact forces between a robot and a rigid environment — and three active joints in the knees and hips. The robot is powered by a one-cylinder go-kart engine, and its dynamic regulating system allows it to maintain balance. Its movement sensors embrace joint position, joint force, ground contact, ground load and a stereo vision system.
In 2012, developers were still working to refine BigDog’s capabilities before plans to officially deploy it to military squads. However, the project was discontinued in 2015 after concluding its gas-powered engine was too noisy to be used in combat.
Developer: Boston Dynamics
Use: Assist soldiers in unsafe terrains
2009: LittleDog
Four years after BigDog came LittleDog, Boston Dynamics’ smallest quadrupedal robot to date. LittleDog was developed specifically for research purposes to be used by third parties investigating quadrupedal locomotion.
Each of LittleDog’s legs are powered by three electric motors fueled by lithium polymer batteries and have a maximum operation time of thirty minutes. LittleDog maintains a large range of motion and is capable of climbing, crawling and walking across rocky terrains. A PC-level computer placed on top of LittleDog is responsible for its movement sensors, controls and communications. It can be controlled remotely and includes data-logging support for data analysis purposes.
Developer: Boston Dynamics
Use: Research on locomotion in quadrupeds
2011: AlphaDog Proto
Continuing their efforts to develop military-grade robots, Boston Dynamics released AlphaDog Proto in 2011. Powered by a hydraulic actuation system, AlphaDog Proto is designed to support soldiers in carrying heavy gear across rocky terrains. It’s capable of carrying up to 400 pounds for as far as 20 miles, all within the span of 24 hours, without needing to refuel.
AlphaDog Proto is equipped with a GPS navigation and computer vision system that allows it to follow soldiers while carrying their gear. Thanks to an internal combustion engine, AlphaDog Proto proved to be quieter than its predecessor BigDog, making it more suitable for field missions.
Developer: Boston Dynamics
Use: Assist soldiers in carrying heavy gear over unsafe terrains
2012: Legged Squad Support System (LS3)
Boston Dynamics’ development of the Legged Squad Support System (LS3) came soon after the creation of BigDog in their efforts to continue refining their quadrupedal robots for soldiers and Marines. LS3 was capable of operating in hot, cold, wet and otherwise unfavorable conditions. It contained a stereo vision system with a pair of stereo cameras, which were mounted inside the robot’s head. This operated in conjunction with a light-detecting and ranging unit that allowed it to follow a soldier’s lead and record feedback obtained from the camera.
Compared to BigDog, LS3 was around 10 times quieter at certain times and had an increased walking speed of one to three miles per hour, increased jogging speed of five miles per hour and the ability to run across flat surfaces at seven miles per hour. It was also capable of responding to ten voice commands, which was a more efficient function for soldiers who would be too preoccupied with a mission to use manual controls.
Five years into development, LS3 had successfully been refined enough to be able to operate with Marines in a realistic combat exercise and was used to resupply combat squads in locations that were difficult for squad vehicles to reach. By 2015, however, the LS3 was shelved due to noise and repair limitations. While the Marines were ultimately unable to use the LS3 in service, it provided valuable research insights in the field of autonomous technology.
Developer: Boston Dynamics
Use: Assist soldiers in carrying heavy gear over unsafe terrains
2016: Spot
Spot is Boston Dynamics’ next creation in their line of quadrupedal robots, designed in an effort to move away from developing quadrupeds strictly for military use and instead move into more commercial use. Spot is significantly smaller than their previous models, weighing just 160 pounds. Spot is capable of exploring rocky terrains, avoiding objects in its path during travel and climbing stairs and hills.
Spot’s hardware is equipped with powerful control boards and five sensor units on all sides of its body that allow it to navigate an area autonomously from any angle. Twelve custom motors power Spot’s legs, gaining speed of up to five feet per second and operating for up to 90 minutes. Its sensors are able to capture spherical images and also allow for mobile manipulation for tasks such as opening doors and grasping objects. Spot’s control methods are far more advanced than Boston Dynamics’ earlier robots, allowing for autonomous control in a wider variety of situations.
Developer: Boston Dynamics
Use: Documenting construction process and monitoring remote high-risk environments
2016: ANYmal
While Boston Dynamics had been the main leader in quadrupedal robots since the early 2000s, Swiss robotics company ANYbotics came out with its own iteration of the robotic dog in 2016. Positioned as an end-to-end robotic inspection solution, ANYmal was developed for industrial use, specifically the inspection of unsafe environments like energy and industrial plants.
ANYmal is mounted with a variety of laser inspection sensors to provide visual, thermal and acoustic readings. Equipped with an on-board camera, it’s capable of remote panning and tilting settings to adjust views of the inspection site. ANYmal is capable of autonomously perceiving its environment, planning its navigation path and selecting proper footholds during travel. It can even walk up stairs and fit into difficult-to-reach areas that traditional wheeled robots can’t.
ANYmal has undergone a handful of development iterations since 2016 and is available for purchase as of 2021. ANYbotics is currently working on an upgraded version of the robot suitable for potentially explosive environments.
Developer: ETH Zurich and ANYbotics
Use: Remote inspection of unsafe environments
2021: Vision 60
One of the latest developments in quadrupedal robots is Ghost Robotics’ Vision 60 robotic dog, which has recently been tested at the U.S. Air Force’s Scott Air Force Base in Illinois as part of its one-year pilot testing program. Built to mitigate risks faced by Air Force pilots, Vision 60 features a rifle mounted on its back contained in a gun pod and is equipped with sensors that allow it to operate in a wide variety of unstable terrains. It’s also capable of thermal imaging, infrared configuration and high-definition video streaming.
Vision 60 can carry a maximum of 31 pounds and can travel at up to 5.24 feet per second. It’s considered a semi-autonomous robot due to its accompanying rifle; while it can accurately line up with a target on its own, it can’t open fire without a human operator (in accordance with the U.S. military’s autonomous systems policy prohibiting automatic target engagement).
Developer: Ghost Robotics
Use: Military and Homeland Security operations
2021: CyberDog
With more companies embracing the development of quadrupeds, Xiaomi Global followed suit and released their version named CyberDog. CyberDog is an experimental, open-source robot promoted as both a human-friendly companion and an asset by law enforcement and military. CyberDog is sleeker and smaller than its other robotic dog predecessors, carrying a payload of just 6.6 pounds and running over 10 feet per second.
CyberDog is equipped with multiple cameras and image sensors located across its body, including touch sensors and an ultra-wide fisheye lens. CyberDog can hold 128 gigabytes of storage and is powered by Nvidia’s Jetson Xavier AI platform to perform real-time analyses of its surroundings, create navigation paths, plot its destination and avoid obstacles. CyberDog can also perform backflips and respond to voice commands thanks to its six microphones.
By making CyberDog an open-source project, Xiaomi hopes to expand its reach into the future of robot development and innovation. Its open-source nature is meant to encourage robotics enthusiasts to try their hand at writing code for CyberDog, giving the project more exposure and bolstering Xiaomi’s reputation in the robotics community.
Developer: Xiaomi Global
Use: An open-source platform for developers to build upon
While the market for quadrupedal robots is still in its early stages, interest is steadily growing in a wide range of industries. As for fears of robots pushing out the need for traditionally human-led jobs, these machines are more intended to support humans alongside their jobs rather than replace them outright.
On the other hand, privacy concerns associated with robots aren’t to be ignored. As with any tech-enabled device, hacking is always possible, especially for open-source robotic models that can put users’ personal information at risk. This applies not only to the quadrupeds discussed above, but to more common commercial robotic systems like baby monitors, security systems and other WiFi-connected devices. It’s important to ensure your home network system is as strong and secure as possible with a home antivirus platform.
Supporters will be able to help donate robot kits to schools to support STEM education
Toronto, Ontario, Canada – Nov 2021 – Quantum Robotic Systems Inc. (QRS) announced the launch of a Kickstarter campaign for QBii, an affordable, multi-functional and expandable service robot.
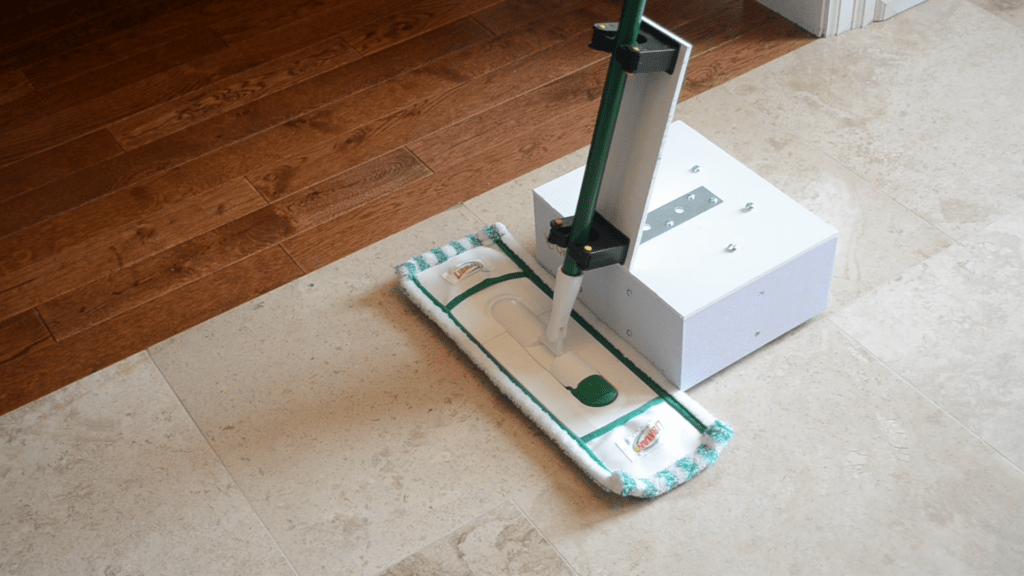
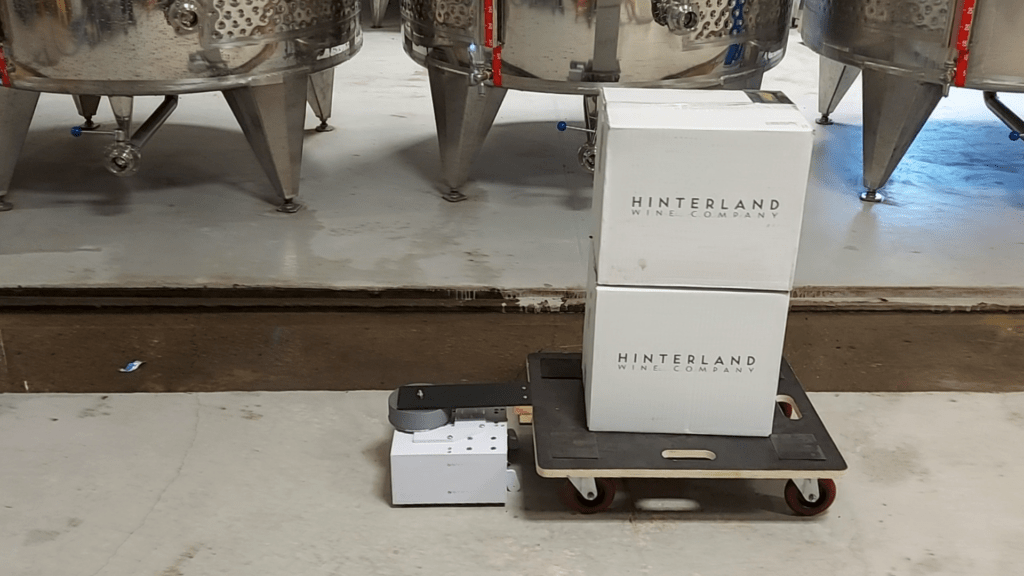
QBii (pronounced “cue + bee”) is about the size of a shoebox and weighs only 9 lbs. While most other service robots are limited to only one function, QBii performs a host of useful tasks in the home and in the workplace, including
Carrying heavy items like grocery bins or boxes (up to 50 lbs)
Sweeping, mopping and vacuuming floors
Towing carts with payloads (up to 200 lbs)
QBii is also programmable and customizable. “People have the option of purchasing QBii as a kit, which makes it a powerful resource for STEM educators,” says QRS president, Dr. Frank Naccarato. “In fact, supporters of our Kickstarter can contribute towards the donation of QBii Kits to schools.”
Founded in 2016 by Dr. Frank Naccarato, Quantum Robotic Systems Inc. (QRS) is a Toronto-based company that makes unique mobile autonomous robots. QRS has developed and patented a novel stairclimbing technology that allows users to carry heavy, bulky loads up and down stairs in an easier, faster and safer way. The company has incorporated this technology into its Robotic Stairclimbing Assistant (ROSA), a service robot that can carry things while climbing up and down stairs, and Doll-E, a stairclimbing moving cart capable of lifting 500 lbs.
Robotics researchers from the Oxford Universities Robotics Institute, have contributed to the winning team, Team CERBERUS, at the DARPA Subterranean Challenge – coming away with the top prize of $2m. The finals of the competition concluded on Friday in an underground cavern in Louisville, Kentucky with 8 international teams going head-to-head.
Underground settings present significant challenges for civilian first responders, with unknow hazards and conditions that can vary drastically or change quickly. The DARPA Subterranean or „SubT“ Challenge was established to stimulate new approaches to rapidly map, navigate, and search underground environments during time-sensitive disaster response scenarios.
The challenge took place over three years and was designed to push the boundaries of autonomous robotic technology. The task was to explore an underground environment and to locate objects such as mannequins – simulating injured humans, – backpacks, phones and tools.
‘We are delighted to have done so well. Contributing to CERBERUS has really accelerated our research. After 3 years of preparation, it was fantastic to test it in the DARPA’s complex underground maze’. Said Prof. Maurice Fallon, lead of the Oxford University team.
Points were awarded when an object was correctly located. Challenges included locomotion over rough terrain, accurate mapping, and coordination of the robot team by a single operator from outside the test location. The test location blended aspects of cave, tunnel and urban subways and was often unlit, filled with smoke or on a steep slope.
CERBERUS*, deployed a team of four quadruped robots, called ANYmals, as well as autonomous aerial vehicles in the competition organized by the US Government research agency DARPA.
‘In the underground environment there are so many challenges from lighting and communications to the slipperiness of terrain itself. This demanded a whole range of breakthroughs by our team’. Said Dr. Marco Camurri, Senior researcher, Oxford University.
In the end CERBERUS tied with a team from CSIRO – a research lab based in Brisbane, Australia – winning only on a tiebreaker. Other teams included representatives from top universities such as University of Colorado, Boulder (in 3rd place), Carnegie Mellon University, Massachusetts Institute of Technology (MIT) and Jet Propulsion Laboratory (part of NASA).
It is envisaged that the technologies will impact on disaster response, environmental monitoring, industrial inspection, and construction sectors.
BOCA RATON, FL (August 18, 2021) — 4ocean, a purpose-driven B Corp with a mission to end the ocean plastic crisis, is pleased to announce their partnership with Poralu Marine, a global leader in marine- grade technologies, on the launch of the BeBot in the United States, an impressive beach cleaning robot designed to recover coastal plastic debris.
The electric-powered BeBot can clean up to 3,000 sqm of beach per hour, 20-30x more effective than collecting trash by hand. The machine is agile and easy to maneuver, a clear differentiator from existing options, and it specifically excels at removing small pieces of plastic and other trash that are notoriously difficult to clean by hand, using small 1 cm x 1 cm sifting grids to separate these items from the sand.
Traditional machines are typically very large, powered by gas, and often repurposed from other agricultural purposes, making them poorly suited for more delicate beach cleanup work. In contrast, the BeBot’s smaller footprint and more shallow cleaning depth of 10 cm, effectively removes common beach trash while avoiding disruptions to any nearby habitats or animals, providing a more effective and sustainable approach to cleanups.
„We are always searching for innovative technology to improve our cleanup capabilities and are thrilled to partner with Poralu Marine on introducing such an impactful piece of technology,“ said Alex Schulze, 4ocean’s co-founder and CEO. „With the launch of the BeBot, we are able to work smarter and sustainably while recovering plastic that has already seen the ocean and preventing new plastic from ever getting there in the first place.“
Meant to be used daily, the BeBot is remote operated and can be controlled by an operator up to approximately 950 feet away. The robot makes minimal noise while cleaning and requires a much smaller footprint for storage, making it the ideal cleaning method for beaches in populated areas. This design approach was intentionally created with cleaning trash in mind, which is a first of its kind. 4ocean is on track to remove 20 million pounds of trash by year’s end and the BeBot will be essential in helping the brand reach this important milestone.
Claire Touvier, member of the Environmental Solutions team from Poralu Marine noted „It is a real honor to present BeBot. We are very proud to be able to launch this new robot in the US with the help of 4ocean. This cutting edge technology was developed in Italy by a team of experts dedicated to robotics. While traditional machines equipped with wheels were degrading the shoreline, BeBot has groundbreaking and unpreceedented environmental assets. With a unique track system distributing equal and minimum pressure on the sand, BeBot reduces erosion. This innovative design also helps the preservation of biodiversity as it prevents the compression of turtles‘ eggs and any vegetal ecosystem in the sand.“
This impressive beach cleaning robot represents important innovation in the ocean reclamation space, thinking creatively about the more effective, efficient and eco-friendly way to remove the small plastics that currently litter our beaches. 4ocean and Poralu Marine are thrilled collaborating as leaders in this space, preventing further pollution of our oceans.
To learn more about the BeBot and all of 4ocean’s ocean cleanup initiatives, please visit 4ocean.com.
About 4ocean
4ocean is a purpose-driven business with a mission to help end the ocean plastic crisis by cleaning the ocean and coastlines while stopping the inflow of plastic. With the goal of creating an economy around cleaning the ocean, 4ocean has built a sustainable business model that allows the company to fund cleanups, utilize the latest technology and make a monthly $50,000 donation to marine conservation organizations. Ocean cleanups are funded entirely through product purchases, removing one pound of trash for every item sold, for a total of over 15 million pounds to date. 4ocean prioritizes engaging coastal communities, which creates jobs and adds revenue to local economies while changing the demand from catching fish to catching plastic. The solution to ending ocean plastic pollution lies in stopping it on land before it enters the ocean, which is why 4ocean is educating consumers about ways to reduce their single-use plastic consumption.
About Poralu Marine
Developing unique leisure marina solutions and equipment is the core activity of Poralu Marine, which has designed, built and installed more than 8,000 projects worldwide making it the global industry leader in the design and construction of aluminium structures. From this expertise in durable installations, Poralu Marine is constantly innovating with the launch of footbridges, environmentally friendly anchoring solutions, and floating waste collectors (Seabin), to name just a few. The activities of the group’s brands – Poralu Marine, Nautiscaphe, Poralu Bridge, Rotax, WPS, EDDS – are a testimony to the constant renewal of our product range which is particularly respectful of the natural environment and of those who fight to preserve it.
In 2021, Poralu Marine strengthened its leadership in the matter of environmental protection by launching „The Searial Cleaners“ the first ever range of littoral waste collectors.
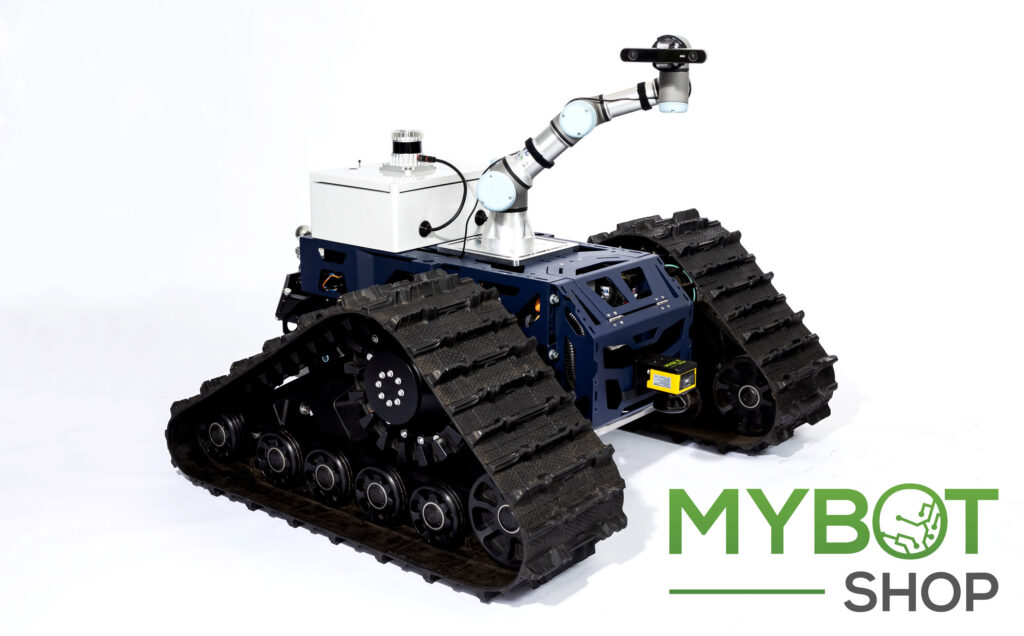
Autonomes Fahren ist schon lange keine Zukunftstechnologie mehr. Doch nicht nur im PKW auf der Straße soll alsbald auf den Fahrer verzichtet werden. So hat auch MYBOTSHOP, der deutsche Vertriebspartner für Robotik, Sensorik und Automatisierungstechnologie, ein neues Gefährt im Programm. Mit dem weiterentwickelten MBS ROVO 2 führt das Unternehmen aus Nordrhein-Westfalen ein Kettenfahrzeug auf dem Robotermarkt ein, das den meisten Umwelteinflüssen standhält und die Kosteneffizienz in Unternehmen steigern soll.
Neben der Basis-Version im bald erhältlichen MYBOTSHOP-grün, gibt es das Kettenfahrzeug auch als voll konfigurierbare und auf Kundenwünsche zugeschnittene Premium-Version. Dabei profitiert der Endkunde von der jahrelangen Erfahrung und Spezialisierung im Bereich der Anwendungsentwicklung und Forschung, die hausintern bei MYBOTSHOP umgesetzt wird. Das bedeutet, dass Zusatzelemente komplett konfigurierbar und bei MYBOTSHOP auf Anfrage erhältlich sind. Somit bekommt der Endkunde dann ein komplett mit Software aufgespieltes und in Haus getestetes Produkt ausgeliefert. Und auch während der Nutzung steht MYBOTSHOP mit seinem Support und zur Wartung beratend zur Seite. Für die ROS-basierte Programmierung wird eine vollständige Dokumentation als Support auf der Website zur Verfügung gestellt.
Das geländegängige und wassergeschützte Fahrzeug (IP 65) überwindet souverän verschiedene Untergründe wie Schlamm, Schnee und Eis, Kies, Schotter und Sand. Ermöglicht wird dies durch den niedrigen Anpressdruck, der auf der Kettenlänge basiert. Die Akkulaufzeit liegt derzeit bei ca. 8 h (abhängig von Geschwindigkeit und Belastung) und die maximale Geschwindigkeit des Fahrzeugs bei knapp 20 km/h. Optional kann ein Modul für die Schnellladefunktion erworben werden. Mit einer Traglast von bis zu 500 kg bietet sich das Fahrzeug besonders als Transportplattform an. Die Zugkraft liegt bei knapp 2 t und via optionaler Anhängerkupplung lassen sich Anhänger und Fahrzeuge problemlos ziehen.
Mittels der externen Spannungsversorgung lassen sich Zusatzverbraucher wie Roboterarme, Kameras, 3D-LiDAR und weitere Komponenten anschließen. Gerade der Ouster 3D-LiDAR bietet sich für das Mapping an, das beim autonomen Fahren unausweichlich ist. Die via Ouster 3D-LiDAR detailgetreue erstellte 3D-Punktwolke basiert auf bis zu 128 Lagen bei einer Winkelauflösung von nur 0,18° und erfüllt dabei alle relevanten Datenschutz-Vorschriften. Ein Roboterarm, wie der 6-achsige Universal Robots UR-3, ermöglicht unter anderem als Allrounder-Arm die mobile Manipulation. Empfehlenswert ist die Nutzung eines HOKUYO UAM-05LP – einem sogenannten Safety LiDAR. Dies bedeutet, dass er durch seine TÜV-Süd-Zertifizierung, bzw. seinem redundanten Aufbau, unter anderem in Roboter-Mensch Applikationen eingesetzt werden darf. Dabei arbeitet das System nach dem so genannten ToF-Prinzip (Time of Flight) wobei die Zeit des emittierten Lichts gemessen wird. Infolge dessen sind maximale Messzeiten von 60 ms möglich. Die verwendete Stereolabs ZED ist eine performante 3D-Kamera für einen breiten Anwendungsbereich. So verfügt diese Kamera über zwei 4 MP Kameras, wodurch 2 K-Aufnahmen (4416 x 1242 px) mit einer Framerate von bis zu 100 Hz ermöglicht werden.
Mit dem MBS ROVO 2 kann MYBOTSHOP ein Produkt anbieten, das durch geringen Wartungsaufwand und eine lange Lebensdauer überzeugt – Preis und Leistung stimmen hier überein. Aufgrund jahrelanger Erfahrung, erprobter Technik, permanenter Weiterentwicklung und Verwendung qualitativ hochwertiger Komponenten im Fahrzeug rentieren sich die Anschaffungskosten in Höhe von 40.000 EUR (UVP). MYBOTSHOP Firmengründer Daniel Kottlarz schöpft aus der autonomen Zukunft und künstlichen Intelligenz das Potenzial, Arbeitsschritte und Prozessabläufe zu vereinfachen und die Kosten-Nutzen-Effizienz zu steigern. Ebenso können Mitarbeiter im gefährlichen Arbeitsumgebungen reduziert und deren Sicherheit unterstützt werden.
Norwegian airport operator Avinor is now taking the next step towards autonomous snow removal through a new framework agreement regarding the purchase of self-driving runway sweepers. The self-driving technology is developed by the technology company Yeti Move AS, where Semcon is one of the co-owners.
Since the winter of 2018/2019, a number of self-driving runway sweepers are being tested at Oslo Airport. With Avinor’s new framework agreement with snowplough manufacturer Øveraasen, which runs for eight years, more autonomous vehicles will be put into operation during the winter of 2021/2022. Behind the self-driving vehicles is the technology company Yeti Move AS, which delivers the control system that runs the autonomous operations. The majority owners of Yeti Move AS are Øveraasen, Husqvarna and Semcon.
Today, efficiency and automation are high on the agenda of airlines and airport operators worldwide and the benefits of autonomous snowploughs at airports are many. In addition to cost efficiency, the new technology entails a higher capacity and greater clearing width, which makes it possible to reduce the number of vehicles and thereby achieve major environmental benefits. The system is also developed with so-called „condition monitoring“ which provides a complete overview of the equipment’s condition and possible service needs.
”The contract with Avinor is an important step in the development of Yeti Move and gives the company a world-leading position in autonomous snow removal at airports. This is a result of years of collaboration with Øveraasen as a machine supplier and Semcon as a competence partner”, says Peter Due, CEO of Yeti Move.
”Semcon has extensive experience in developing autonomous solutions, from first idea to finished solution. We have been part of Yeti Moves‘ journey from the start and are proud to have, as a development and competence partner, contributed to developing the software platform that makes autonomous operation possible”, says Hans Peter Havdal, responsible for Semcon in Norway.