Robotistan, a pioneer in innovative educational solutions, has introduced a new STEM robot called BerryBot. Designed to help children develop coding and robotics skills, this creative and educational robot offers practical experiences in science, technology, engineering, and mathematics (STEM).
A New Era in Robotics Education
BerryBot is more than just a robot; it’s a learning platform that nurtures creativity and problem-solving skills. With its compact and customizable design, BerryBot allows users to paint and personalize their robot, thanks to its wooden body.
The wooden structure not only reflects an eco-friendly design approach but also allows children to shape their robots according to their own style. BerryBot is designed to be flexible enough for both classroom and home use.
Key Features
BerryBot’s innovative features support the development of both technical and creative skills:
Customizable Wooden Body:
Kids can paint their robots to reflect their unique style.
Durable and sustainable construction.
Versatile Coding Options:
Block-based programming for beginners.
Advanced programming with Python and Arduino IDE.
User-friendly interface for an easy learning process.
Multi-Mode Movement:
Line-following, sumo, and free movement modes.
Real-time visual feedback via the LED matrix display.
Wireless control through Bluetooth connectivity.
An Educational Tool Combining Coding Skills with Creativity
BerryBot offers young aspiring engineers a fun and educational experience. While creating different movement scenarios, children not only enhance their problem-solving skills but also develop creative projects.
Thanks to BerryBot’s multi-mode structure, users can program the robot’s movement capabilities in various ways. This feature transforms BerryBot from being just a toy to a valuable educational tool that encourages creative thinking.
Mehmet Akçalı, Marketing and Product Director at Robotistan, highlighted the educational features of BerryBot:
„BerryBot offers a practical and fun way for children to step into the world of STEM. Combining coding skills with creative projects, this robot will become an indispensable educational tool for both teachers and parents.“
He also mentioned a special opportunity for early supporters:
„We’re thrilled to announce our Kickstarter campaign, where backers can take advantage of the Early Bird offer. Additionally, as part of our commitment to supporting STEM education, for every 10 pledges, we will gift one BerryBot to a school or an educational organization in need. This way, our supporters not only get an amazing educational robot but also help inspire the next generation of young innovators.“
Shaping the Engineers of the Future
As the importance of STEM education continues to grow, innovative tools like BerryBot are preparing young minds for the future. With its fun yet educational nature, BerryBot strengthens children’s coding, algorithmic thinking, and problem-solving skills while also inspiring creative projects.
Robotistan emphasizes that BerryBot is not just an educational robot but also a platform where children can express themselves. Produced with this vision in mind, BerryBot is ready to make a difference both at home and in educational environments.
To learn more about BerryBot and to be among the first to own it and take advantage of the Early Bird offer, visit the Kickstarter page!
Die Entwicklung im Bereich humanoider Roboter schreitet mit einer beeindruckenden Dynamik voran. Das Kräftemessen zwischen den USA und China sowie Fortschritte im Bereich der KI, der Batterieentwicklung und der Mechanik befeuern die Performance der Men in Blech. Auf der automatica wird deutlich werden, wie weit diese Entwicklung bereits fortgeschritten ist.
Was die Humanoiden im Reich der Mitte zu leisten im Stande sind, konnten sie jüngst bei einem Halbmarathon in Peking unter Beweis stellen. Auf der gut 21 Kilometer langen Laufstrecke traten rund 20 humanoide Roboter erfolgreich gegen Menschen an. Mit dem Wettlauf hat die Volksrepublik ihr Ziel erreicht, sich als einer der führenden Anbieter menschenähnlicher Roboter zu präsentieren.
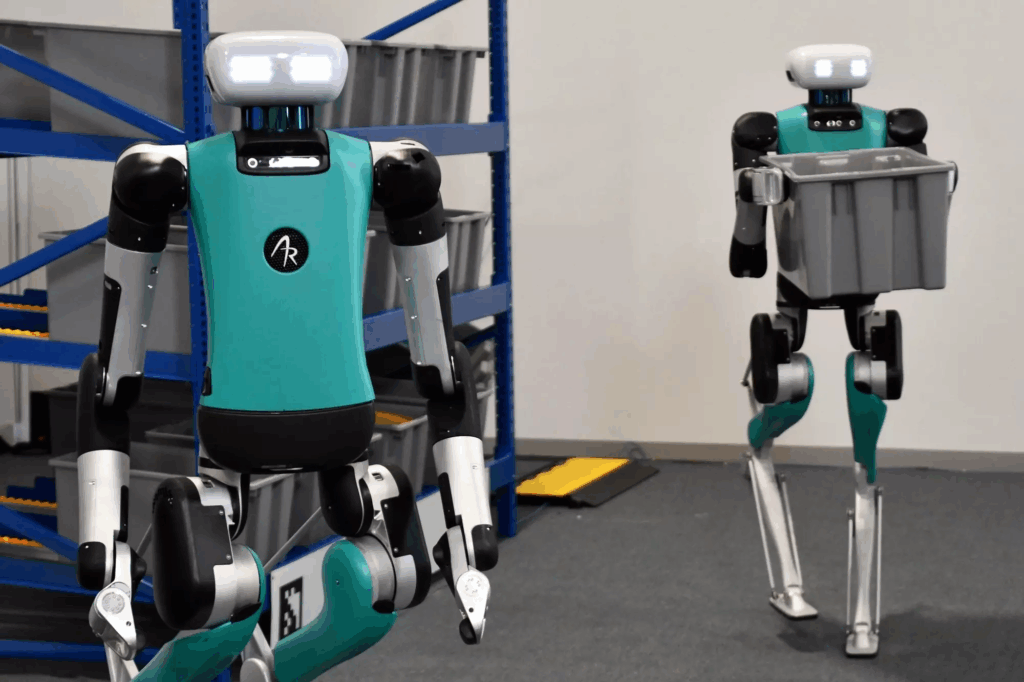
Zwei Beine ermöglichen maximale Flexibilität und Mobilität
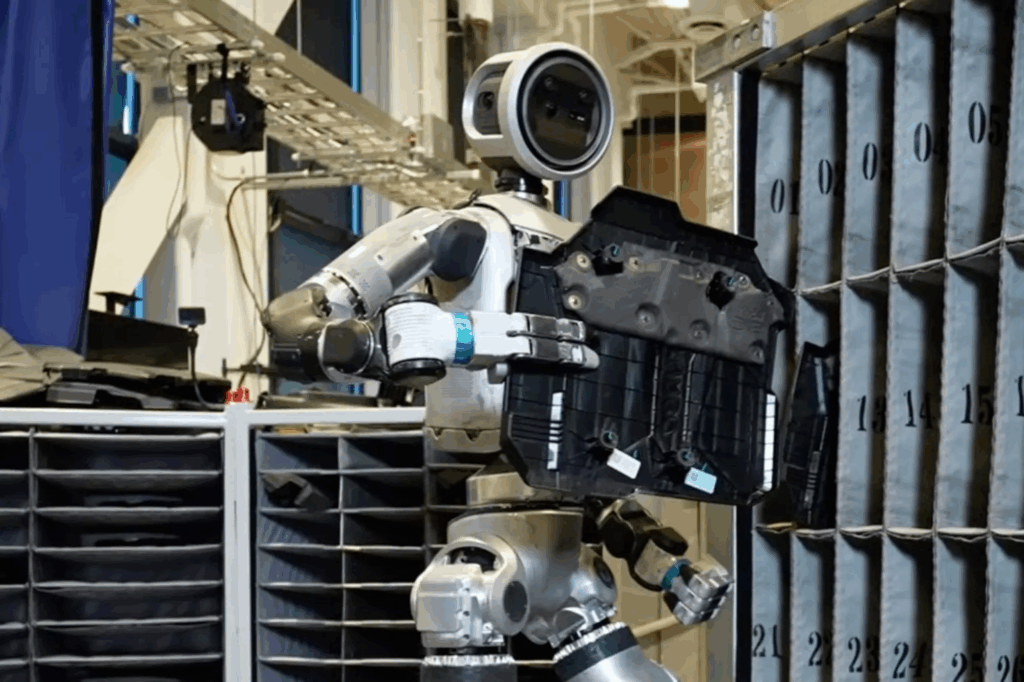
Aber gerade ein Halbmarathon führt zwangsläufig zu einer oft gestellten Frage: Warum haben Humanoide Beine? Wäre es nicht effizienter, Radantriebe zu nutzen? Weshalb die meisten Humanoiden dennoch mit zwei Beinen ausgestattet sind, erklärt Jonathan Hurst, Chief Robot Officer bei Agility Robotics: „Zweibeinige Roboter sind für die Koexistenz mit dem Menschen konzipiert und bieten eine Vielseitigkeit und Mobilität, die über das hinausgeht, was Radantriebe leisten können. Durch den Einsatz von Beinen können sich Humanoide an komplexe Umgebungen anpassen, Treppen steigen, Bordsteine überwinden und ein breites Aufgabenspektrum erfüllen.“ Digit, der Humanoide von Agility, ist bereits in vielen Applikationen vorwiegend in Logistikzentren im Einsatz wie beispielsweise bei amazon und GXO Logistics. Mit einer Körpergröße von 1,75 m und einem Gewicht von etwa 64 kg kann Digit komplexe Aufgaben wie das Heben von Lasten mit einem Gewicht von bis zu 16 kg ausführen. Und dank fortschrittlicher Sensorik, darunter LIDAR und Kameras, kann er auch selbstständig navigieren. Über Digit und die Frage, wie Humanoide Lücken in der Automatisierungskette schließen können, spricht auch Melonee Wise, Chief Product Officer bei Agility Robotics, auf dem automatica Forum in Halle A5. Anwendungsorientiert referiert direkt im Anschluss Carolin Richter, Head of Next Generation Robotics bei der BMW Group, über die Erfahrungen des Unternehmens mit konkreten Praxiseinsätzen von Humanoiden.
USA mit Vorreiterrolle in der Technologieentwicklung
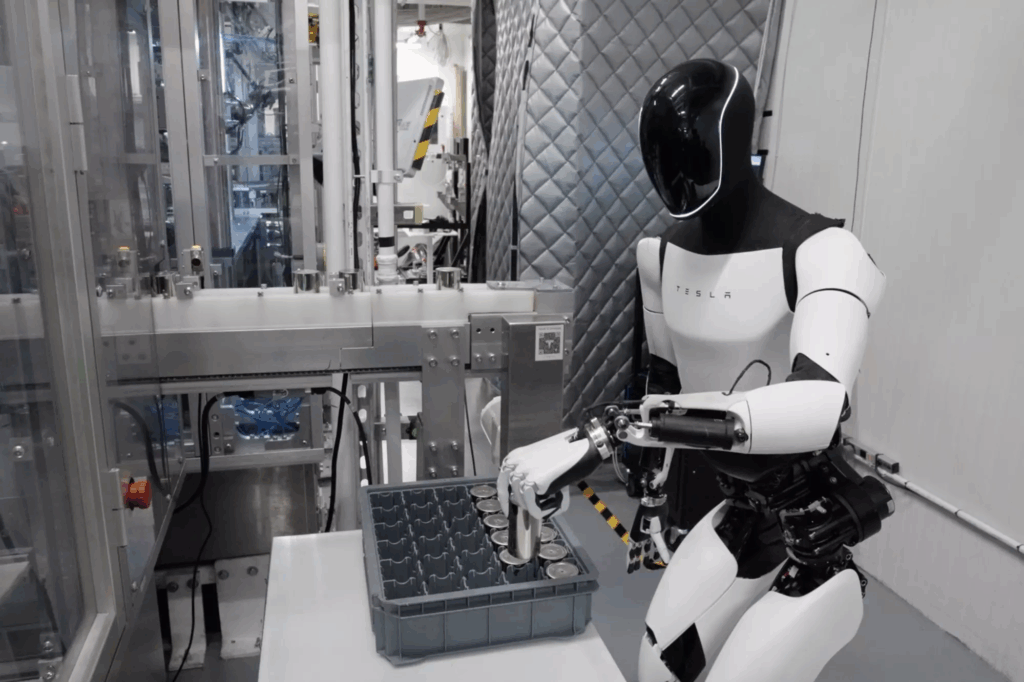
Wie Digit kommen weitere hochentwickelte Humanoide aus den USA, darunter Atlas von Boston Dynamics, Optimus von Tesla, Figure 01 und 02 von Figure AI und Apollo von Apptronik. Sie alle arbeiten bereits in Piloteinsätzen in der Automobilindustrie. „Wir entwickeln die fortschrittlichsten und leistungsfähigsten humanoiden Roboter der Welt, die den Menschen auf sinnvolle und revolutionäre Weise zur Seite stehen“, sagt Jeff Cardenas, CEO und Mitbegründer von Apptronik. Aber viel Kapital und potente Mitstreiter sind nötig, um diese Entwicklungen voranzutreiben. Gerade konnte Apptronik eine Finanzierungsrunde von mehr als 350 Millionen Dollar abschließen. Kooperationen mit der NASA, NVIDIA, Google DeepMind und auf der Anwenderseite mit Mercedes-Benz und GXO Logistics sollen sicherstellen, dass Apptronik in diesem Zukunftsmarkt weiter ganz vorne mitspielen wird.
Deutschland mit Aufholbedarf bei humanoider Robotik
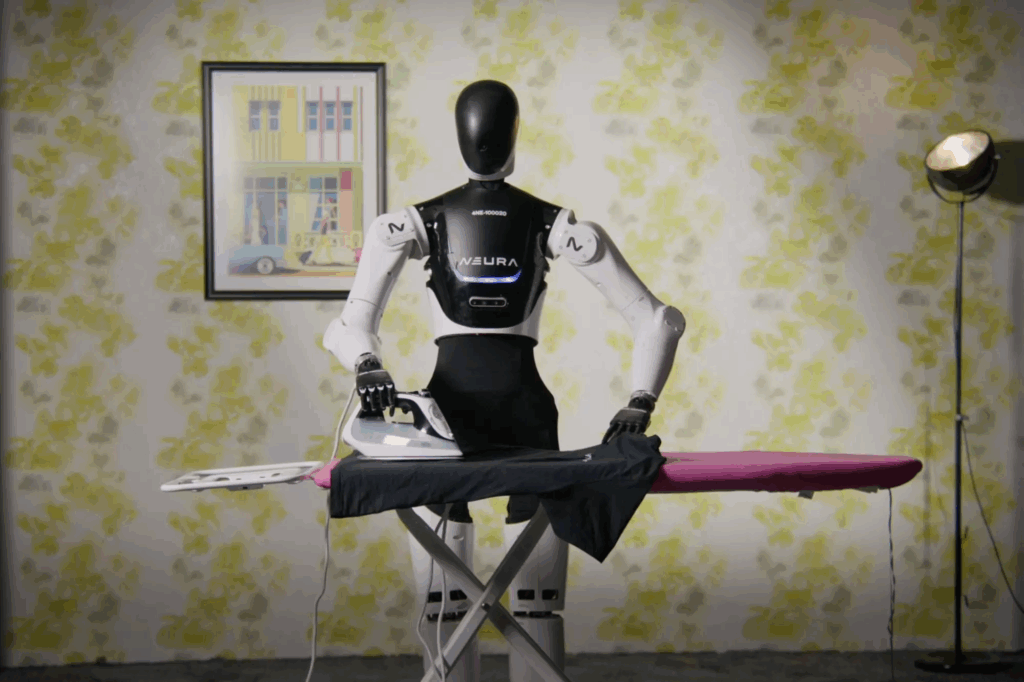
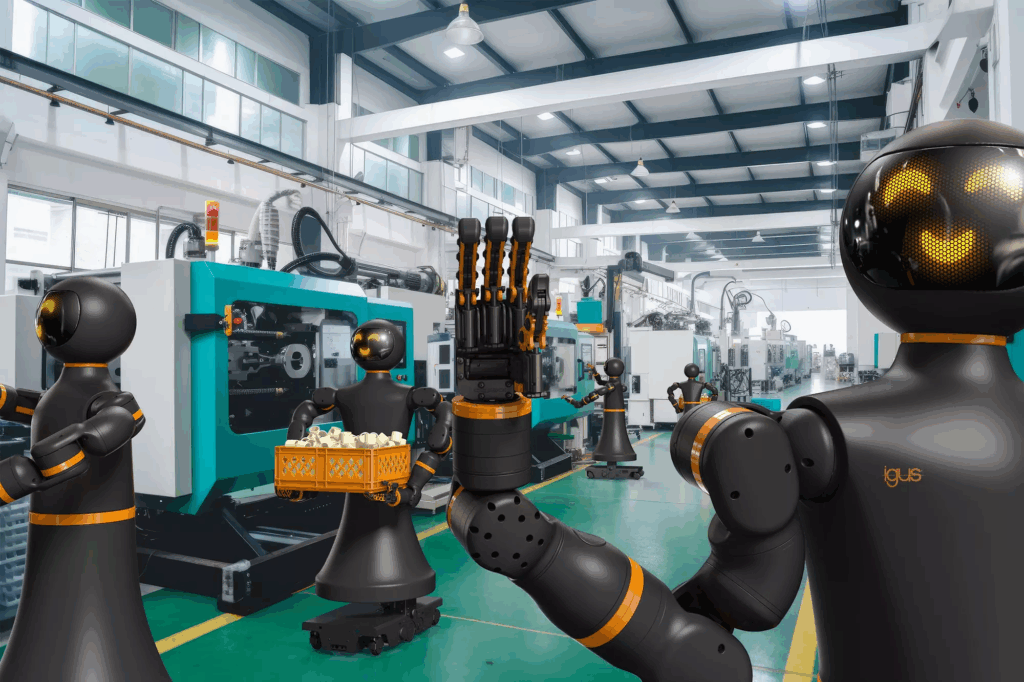
Zwar spielt Deutschland auf dem Weltmarkt für Humanoide keine Schlüsselrolle, dennoch belegt die automatica, dass es auch hier vielversprechende Entwicklungen gibt. Denn neben dem 4NE-1 von Neura Robotics, der bereits 2023 auf der automatica debütierte, werden dieses Jahr weitere Humanoide den Weg nach München finden. Einer von ihnen kommt aus Köln und hört auf den Namen „Iggy Rob“. Igus bietet seinen ersten humanoiden Roboter für knapp unter 50.000 Euro an. Möglich wird dies nach Herstellerangaben durch die Kombination aus hauseigenen Komponenten wie den ReBeL Cobots für die Roboterarme und der mobilen Basis ReBeL Move. Sein Einsatzspektrum reicht von der Assistenzrobotik über Fabrikautomation bis hin zu Bildung und Forschung. Igus will Iggy Rob im eigenen Unternehmen für die Automation von Spritzgießmaschinen nutzen.
Mit Spannung erwartet wird auch der Messeauftritt des Instituts für Robotik und Mechatronik des Deutschen Zentrums für Luft- und Raumfahrt. Hier forscht man intensiv an der Weiterentwicklung in der humanoiden Robotik. Die jüngsten Ergebnisse werden auf der automatica zu sehen sein. Aufhorchen lässt auch die jüngst geschlossene Kooperation des Instituts mit Siemens. „Diese strategische Partnerschaft ist ein weiteres Beispiel für Transfer von Robotiktechnologien aus der Raumfahrt in industrielle Anwendungen“, sagt Institutsleiter Alin Albu-Schäffer. „Die enge Vernetzung mit führenden deutschen Industriepartnern wie Siemens ist essenziell, um die Wettbewerbsfähigkeit der europäischen Robotik auch in der Zukunft, angesichts der rasanten Entwicklungen in USA und China, zu sichern.“
Humanoide Roboter: ein gigantischer Wachstumsmarkt
Tesla sieht sich mit seinem humanoiden Roboter Optimus als Technologieführer. Dieser bewegt sich elegant, ist schnell und besitzt eine hochflexible Fünffinger-Hand. Musk hält Einsätze im Haushalt oder in der Kinderbetreuung bald für möglich und auch Goldman Sachs sieht für den weltweiten Markt für Humanoide hohes Potential. Demnach könnte dieser bis 2035 auf 38 Milliarden US-Dollar steigen. Neben US-amerikanischen Unternehmen verfolgt auch die Volksrepublik ambitionierte Ziele und will innerhalb der nächsten drei Jahre zum Weltmarktführer im Bereich humanoider Roboter aufsteigen. Mittelfristig sollen in China fünf Prozent aller Jobs von Humanoiden übernommen lassen. Das würde dem Einsatz von rund 35 Millionen Einheiten entsprechen. Bereits heute sind in Chinas Unternehmen Humanoide von Unitree, AgiBot, Engine AI, Fourier oder Ubtech in unterschiedlichen Applikationen und Branchen im Einsatz.
Branchenprimus Unitree bringt als einer der ersten Hersteller weltweit mit dem G1 einen kleinen Humanoiden zum spektakulär niedrigen Preis auf den Markt. So soll die Basisversion des 1,3 Meter großen und 35 kg leichten G1 in China nur 16.000 Euro kosten, hierzulande werden dann daraus wohl eher knapp 30.000 Euro. Und je nach Ausbaustufe kann sich dieser Preis schnell mehr als verdoppeln. Das Interesse am G1 ist groß, wie Unitree-Marketingmanagerin Qian Yuqi verrät: „Es gibt bereits Bestellungen aus dem In- und Ausland. Zunächst dürften vor allem wissenschaftliche Forschungseinrichtungen unseren Roboter einsetzen, aber auch Industriebetriebe können sich vorstellen, G1 für einfache Arbeiten zu nutzen.“
Die Entwicklung zeigt: Die Zeit für Humanoide und damit für eine neue Ära der Automation ist gekommen. Dank KI sind sie bereits jetzt in der Lage, einen Teil der Aufgaben zu übernehmen, die bislang Menschen vorbehalten waren. Die automatica verspricht spannenden Einblicke, was Humanoide zu leisten im Stande sind und wie ihr Einsatz die Arbeitswelt beeinflussen kann.
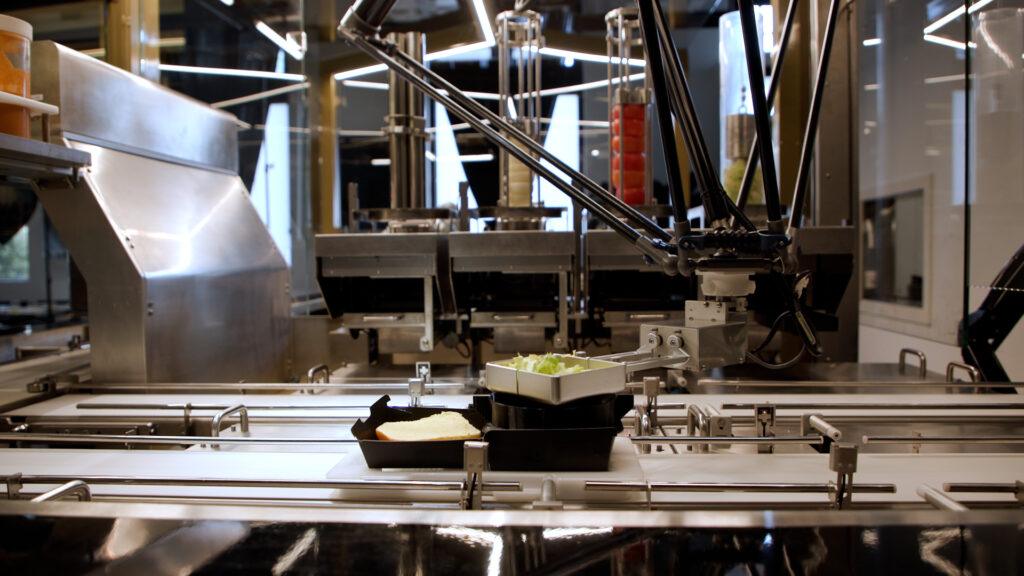
Mit BurgerBots, einem richtungsweisenden Restaurantkonzept, das im kalifornischen Los Gatos realisiert wurde, serviert ABB die Zukunft des Fast Food. In der automatisierten Küche, die stets perfekt zubereitete Burger produziert, stellen der ABB-Deltaroboter IRB 360 FlexPicker sowie der kollaborative ABB-Roboter YuMi die Speisen mit hoher Präzision und Geschwindigkeit zusammen. Gleichzeitig wird der Bestand an Zutaten genau überwacht, sodass sich das Personal ganz auf das Kundenerlebnis konzentrieren kann.
„Die Integration von ABB-Robotern in das Restaurantkonzept von BurgerBots zeigt, welches enorme Potenzial die Automatisierung über das Fabrikumfeld hinaus bietet“, betont Marc Segura, Leiter der Robotics-Division von ABB. „Die Gastronomiebranche ist äußerst dynamisch und anspruchsvoll, und unsere Technologie ermöglicht ihr eine Konsistenz, Effizienz und Zuverlässigkeit auf industriellem Niveau. Laut unserer Umfrage sind 89 Prozent der Führungskräfte und 73 Prozent der Arbeitskräfte im Gastgewerbe offen für die Integration von Robotik, um Aufgaben innerhalb ihres Betriebs zu automatisieren2. Wenn Roboter wiederkehrende und zeitaufwändige Aufgaben übernehmen, kann sich das Personal auf das konzentrieren, worauf es am meisten ankommt – dem Gast ein unvergessliches gastronomisches Erlebnis zu bieten.“
Die kompakte Roboterzelle ist ein Novum in der automatisierten Essenszubereitung, da sie zwei Robotertypen nahtlos mit einem intelligenten Bestandsüberwachungssystem verknüpft. Bei jedem Bestelleingang wird ein frisch gebratenes Burger-Patty auf einem Brötchen in eine Burger-Box gelegt. Die Box wird anschließend auf einem Transporttablett platziert, das mit einem QR-Code versehenen ist. Während sich das Tablett auf einem Förderband bewegt, gibt der IRB 360 FlexPicker in Windeseile und auf hygienische Weise die gewünschten Beläge hinzu – gemäß der im QR-Code gespeicherten Daten. Anschließend übernimmt YuMi die Fertigstellung des Burgers. Pro Burger dauert der gesamte Vorgang lediglich 27 Sekunden.
Die ABB-Robotersteuerung lässt sich zudem nahtlos in nicht-robotische Systeme einbinden. Sie ermöglicht eine Bestandsüberwachung der Zutaten, darunter Zwiebeln, Tomaten, Salat und Saucen, in Echtzeit und sorgt so für einen reibungslosen Ablauf und ein effizientes Küchenmanagement.
Eine der größten Herausforderungen für Restaurantbesitzer besteht heutzutage darin, Personal zu finden und an sich zu binden3. Eine hohe Fluktuation, steigende Lohnkosten und die Monotonie bestimmter Aufgaben im sogenannten „Back-of-House“-Bereich setzen Gastronomiebetriebe nach wie vor unter Druck. Die Automatisierung bietet nicht nur eine Möglichkeit, Personallücken zu schließen, sondern kann durch Reduzierung manueller Tätigkeiten und Verbesserung von Arbeitsabläufen auch dabei helfen, Jobs in der Gastronomie nachhaltiger und attraktiver zu gestalten.
Eine kürzlich von ABB Robotics in Auftrag gegebene Umfrage zeigt, dass ein Umdenken in diese Richtung stattfindet. Demnach sind 67 Prozent der Beschäftigten im Gastgewerbe der Ansicht, dass Robotik und Automatisierung zum Einsatz kommen sollten, um den Umfang an monotonen, schmutzigen und gefährlichen Arbeiten zu reduzieren4. Während 63 Prozent den Gedanken, dass Robotik ihren Job vereinfachen könnte, interessant finden, würden 65 Prozent der Befragten Roboter an ihrem Arbeitsplatz begrüßen, wenn dies die Arbeitssicherheit erhöhen würde.
Die Idee zu BurgerBots stammt von der Unternehmerin Elizabeth Truong, die den Standort in Los Gatos als ersten Schritt zu einem breiteren kommerziellen Rollout sieht. „Die Vision war es, Konsistenz, Transparenz und Effizienz in die Gastronomie zu bringen. Für Restaurantbesitzer bedeutet das einen besseren Einblick in die Lebensmittelkosten, genauere Prognosen und letztendlich eine bessere Entscheidungsfindung. Ich glaube, dass in den kommenden fünf Jahren die meisten Restaurants über irgendeine Form der robotergestützten Automatisierung verfügen werden, sei es bei der Zubereitung im Back-of-House-Bereich, der Zusammenstellung oder auch im Front-of-House-Service. Es wird dann weniger eine Neuheit als vielmehr eine Notwendigkeit sein.“
BurgerBots ist die neueste in einer Reihe robotergestützter Innovationen für den Gastronomiebereich. Die Zusammenarbeit von ABB mit dem Unternehmen RoboEatz an der ARK – einer autonomen robotergestützten Küche, die in der Lage ist, Hunderte von Mahlzeiten mit minimalem menschlichem Eingriff zuzubereiten – demonstriert das Potenzial für eine hocheffiziente, hygienische und individualisierbare Essenszubereitung. Darüber hinaus unterstützt ABB das Unternehmen Makr Shakr bei der Realisierung von Barkeeper-Robotern, die schon bald in Lokalitäten rund um den Globus auf gekonnte Weise Getränke mixen werden. Diese Anwendungen sind nur zwei Beispiele dafür, wie die Robotik das Gastgewerbe dank Schnelligkeit und Konsistenz transformiert.
Die erste BurgerBots-Zelle ist mittlerweile in einem Restaurant in der Innenstadt von Los Gatos in Kalifornien in Betrieb. Weitere Informationen stehen unter www.burgerbots.com zur Verfügung.
AI-driven drone from University of Klagenfurt uses IDS uEye camera for real-time, object-relative navigation—enabling safer, more efficient, and precise inspections.
High-voltage power lines. Electricity distribution station. high voltage electric transmission tower. Distribution electric substation with power lines and transformers.
The inspection of critical infrastructures such as energy plants, bridges or industrial complexes is essential to ensure their safety, reliability and long-term functionality. Traditional inspection methods always require the use of people in areas that are difficult to access or risky. Autonomous mobile robots offer great potential for making inspections more efficient, safer and more accurate. Uncrewed aerial vehicles (UAVs) such as drones in particular have become established as promising platforms, as they can be used flexibly and can even reach areas that are difficult to access from the air. One of the biggest challenges here is to navigate the drone precisely relative to the objects to be inspected in order to reliably capture high-resolution image data or other sensor data.
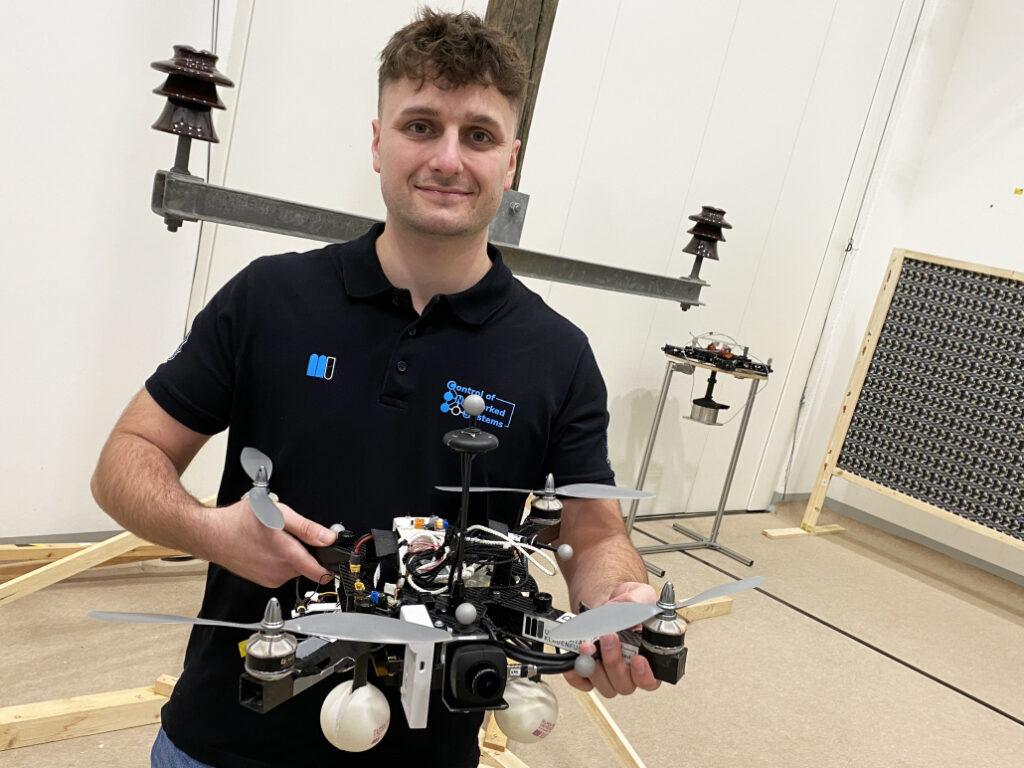
A research group at the University of Klagenfurt has designed a real-time capable drone based on object-relative navigation using artificial intelligence. Also on board: a USB3 Vision industrial camera from the uEye LE family from IDS Imaging Development Systems GmbH.
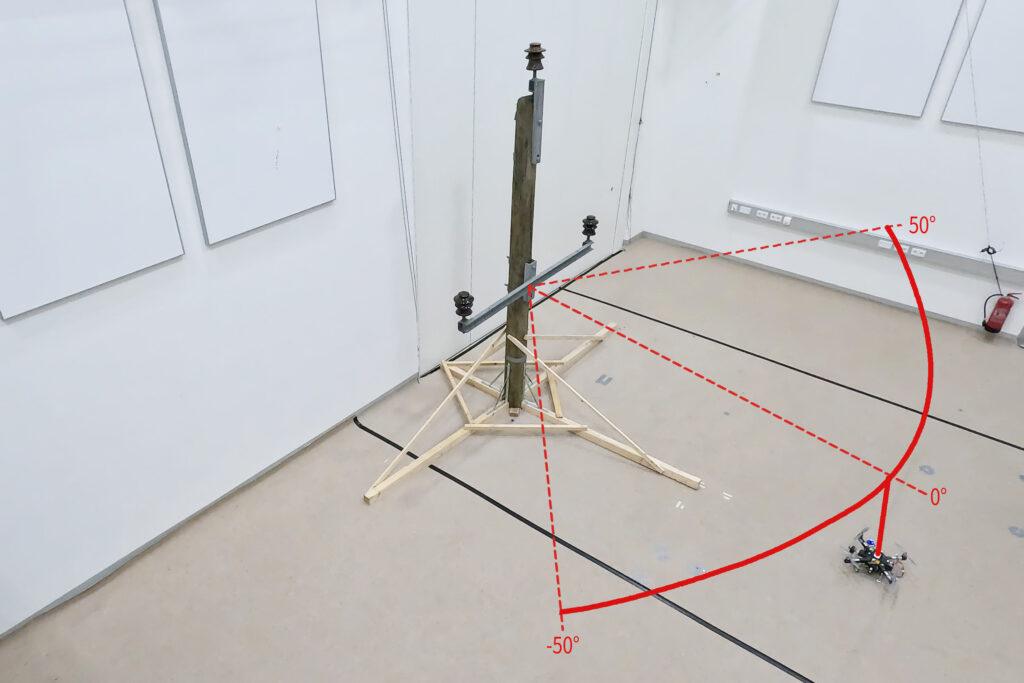
As part of the research project, which was funded by the Austrian Federal Ministry for Climate Action, Environment, Energy, Mobility, Innovation and Technology (BMK), the drone must autonomously recognise what is a power pole and what is an insulator on the power pole. It will fly around the insulator at a distance of three meters and take pictures. „Precise localisation is important such that the camera recordings can also be compared across multiple inspection flights,“ explains Thomas Georg Jantos, PhD student and member of the Control of Networked Systems research group at the University of Klagenfurt. The prerequisite for this is that object-relative navigation must be able to extract so-called semantic information about the objects in question from the raw sensory data captured by the camera. Semantic information makes raw data, in this case the camera images, „understandable“ and makes it possible not only to capture the environment, but also to correctly identify and localise relevant objects.
In this case, this means that an image pixel is not only understood as an independent colour value (e.g. RGB value), but as part of an object, e.g. an isolator. In contrast to classic GNNS (Global Navigation Satellite System), this approach not only provides a position in space, but also a precise relative position and orientation with respect to the object to be inspected (e.g. „Drone is located 1.5m to the left of the upper insulator“).
The key requirement is that image processing and data interpretation must be latency-free so that the drone can adapt its navigation and interaction to the specific conditions and requirements of the inspection task in real time.
Thomas Jantos with the inspection drone – Photo: aau/Müller
Semantic information through intelligent image processing Object recognition, object classification and object pose estimation are performed using artificial intelligence in image processing. „In contrast to GNSS-based inspection approaches using drones, our AI with its semantic information enables the inspection of the infrastructure to be inspected from certain reproducible viewpoints,“ explains Thomas Jantos. „In addition, the chosen approach does not suffer from the usual GNSS problems such as multi-pathing and shadowing caused by large infrastructures or valleys, which can lead to signal degradation and thus to safety risks.“
A USB3 uEye LE serves as the quadcopter’s navigation camera
How much AI fits into a small quadcopter? The hardware setup consists of a TWINs Science Copter platform equipped with a Pixhawk PX4 autopilot, an NVIDIA Jetson Orin AGX 64GB DevKit as on-board computer and a USB3 Vision industrial camera from IDS. „The challenge is to get the artificial intelligence onto the small helicopters.
The computers on the drone are still too slow compared to the computers used to train the AI. With the first successful tests, this is still the subject of current research,“ says Thomas Jantos, describing the problem of further optimising the high-performance AI model for use on the on-board computer.
The camera, on the other hand, delivers perfect basic data straight away, as the tests in the university’s own drone hall show. When selecting a suitable camera model, it was not just a question of meeting the requirements in terms of speed, size, protection class and, last but not least, price. „The camera’s capabilities are essential for the inspection system’s innovative AI-based navigation algorithm,“ says Thomas Jantos. He opted for the U3-3276LE C-HQ model, a space-saving and cost-effective project camera from the uEye LE family. The integrated Sony Pregius IMX265 sensor is probably the best CMOS image sensor in the 3 MP class and enables a resolution of 3.19 megapixels (2064 x 1544 px) with a frame rate of up to 58.0 fps. The integrated 1/1.8″ global shutter, which does not produce any ‚distorted‘ images at these short exposure times compared to a rolling shutter, is decisive for the performance of the sensor. „To ensure a safe and robust inspection flight, high image quality and frame rates are essential,“ Thomas Jantos emphasises. As a navigation camera, the uEye LE provides the embedded AI with the comprehensive image data that the on-board computer needs to calculate the relative position and orientation with respect to the object to be inspected. Based on this information, the drone is able to correct its pose in real time.
The IDS camera is connected to the on-board computer via a USB3 interface. „With the help of the IDS peak SDK, we can integrate the camera and its functionalities very easily into the ROS (Robot Operating System) and thus into our drone,“ explains Thomas Jantos. IDS peak also enables efficient raw image processing and simple adjustment of recording parameters such as auto exposure, auto white Balancing, auto gain and image downsampling.
To ensure a high level of autonomy, control, mission management, safety monitoring and data recording, the researchers use the source-available CNS Flight Stack on the on-board computer. The CNS Flight Stack includes software modules for navigation, sensor fusion and control algorithms and enables the autonomous execution of reproducible and customisable missions. „The modularity of the CNS Flight Stack and the ROS interfaces enable us to seamlessly integrate our sensors and the AI-based ’state estimator‘ for position detection into the entire stack and thus realise autonomous UAV flights. The functionality of our approach is being analysed and developed using the example of an inspection flight around a power pole in the drone hall at the University of Klagenfurt,“ explains Thomas Jantos.
Visualisation of the flight path of an inspection flight around an electricity pole model with three insulators in the research laboratory at the University of Klagenfurt
Precise, autonomous alignment through sensor fusion The high-frequency control signals for the drone are generated by the IMU (Inertial Measurement Unit). Sensor fusion with camera data, LIDAR or GNSS (Global Navigation Satellite System) enables real-time navigation and stabilisation of the drone – for example for position corrections or precise alignment with inspection objects. For the Klagenfurt drone, the IMU of the PX4 is used as a dynamic model in an EKF (Extended Kalman Filter). The EKF estimates where the drone should be now based on the last known position, speed and attitude. New data (e.g. from IMU, GNSS or camera) is then recorded at up to 200 Hz and incorprated into the state estimation process.
The camera captures raw images at 50 fps and an image size of 1280 x 960px. „This is the maximum frame rate that we can achieve with our AI model on the drone’s onboard computer,“ explains Thomas Jantos. When the camera is started, an automatic white balance and gain adjustment are carried out once, while the automatic exposure control remains switched off. The EKF compares the prediction and measurement and corrects the estimate accordingly. This ensures that the drone remains stable and can maintain its position autonomously with high precision.
Electricity pole with insulators in the drone hall at the University of Klagenfurt is used for test flights
Outlook „With regard to research in the field of mobile robots, industrial cameras are necessary for a variety of applications and algorithms. It is important that these cameras are robust, compact, lightweight, fast and have a high resolution. On-device pre-processing (e.g. binning) is also very important, as it saves valuable computing time and resources on the mobile robot,“ emphasises Thomas Jantos.
With corresponding features, IDS cameras are helping to set a new standard in the autonomous inspection of critical infrastructures in this promising research approach, which significantly increases safety, efficiency and data quality.
The Control of Networked Systems (CNS) research group is part of the Institute for Intelligent System Technologies. It is involved in teaching in the English-language Bachelor’s and Master’s programs „Robotics and AI“ and „Information and Communications Engineering (ICE)“ at the University of Klagenfurt. The group’s research focuses on control engineering, state estimation, path and motion planning, modeling of dynamic systems, numerical simulations and the automation of mobile robots in a swarm: More information
uEye LE – the cost-effective, space-saving project camera Model used:USB3 Vision Industriekamera U3-3276LE Rev.1.2 Camera family: uEye LE
Zweiarmiger Kunststoffroboter des Kölner Unternehmens unterstützt künftig auf vielfältige Weise – Testphase vor Kauf inbegriffen
Köln, 16. April 2025 – Humanoide Roboter stehen kurz davor, die Industrie kräftig umzukrempeln. Während bisherige Systeme sehr teuer sind, bietet der motion plastics Spezialist igus mit dem Iggy Rob nun seinen ersten humanoiden Roboter als Low-Cost-Lösung an. Für 47.999 Euro unterstützt er in der industriellen Fertigung, bei Transportaufgaben oder im Service. Um Erfahrung mit dem neuen Helfer zu sammeln, ruft igus zum „Test before Invest“ auf.
Der Trend zeigt in eine klare Richtung: Schätzungen zufolge könnten bis 2030 20 Millionen humanoide Roboter in der Industrie im Einsatz sein. Die Nachfrage nach der Technologie steigt auch bei europäischen Unternehmen rasant an, das Problem dabei: Humanoide Roboter sind aktuell noch sehr teuer, erste Anwendungsmöglichkeiten müssen vielerorts erst identifiziert werden. Das möchte der Kölner motion plastics Experte igus nun ändern: Mit dem Iggy Rob liefert das Unternehmen einen preisgünstigen humanoiden Roboter, der dank seiner zwei Arme und einem stabilen, rädergetriebenen Unterbau eine Vielzahl von Anwendungen ermöglicht. „Die Welt ist für den Menschen geschaffen, das Potenzial für humanoide Roboter ist deshalb riesig“, erklärt Alexander Mühlens, Leiter Geschäftsbereich Low-Cost-Automation bei igus.
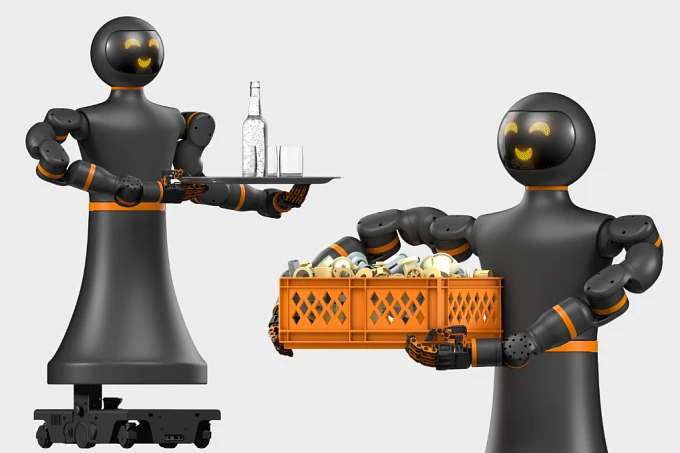
Acht Stunden ohne Pause im Einsatz Der Iggy Rob ist rund 1,70 Meter groß und kann sich acht Stunden lang mit nur einer Akkuladung bewegen. Ausgestattet mit einem Lächeln begrüßt er seine Kolleginnen und Kollegen mit zwei ReBeL Cobot Armen und zwei bionischen Händen. Ausgestattet mit einem LIDAR-Sensor und 3D-Kameras zur Objektdetektion navigiert der Roboter problemlos durch sein Umfeld. Zur Steuerung nutzt igus die hauseigene igus Robot Control. Der Roboter ist nach VDE 5050 für das Flottenmanagement zugelassen und besitzt eine CE-Zertifizierung. Ergänzt um eine ROS2-Schnittstelle erfüllt Iggy Rob die Ansprüche an moderne Robotik.
AMR schafft die Grundlagen Die Basis von Iggy Rob bildet der Autonome Mobile Roboter (AMR) ReBeL Move. Die mobile Plattform ist dank einer Dreipunktlagerung sehr stabil. igus hat bei seinem humanoiden Roboter bewusst auf Beine verzichtet, da die Infrastruktur für AMRs in vielen Fabriken bereits fortgeschritten ist. Mit einer Traglast von 50 Kilogramm und 100 Kilogramm Zuladung schafft der ReBeL Move die Voraussetzungen für die arbeitsplatzungebundene Bewegung. Der Iggy Rob kann als Serviceroboter am Empfang arbeiten, Transportaufgaben in der Fabrik übernehmen oder in der Kantine Besteck abräumen. igus selbst plant, den Iggy Rob beim Einlegen von Bauteilen in die Spritzgussmaschinen des Unternehmens zu nutzen. „Wir gehen davon aus, dass humanoide Roboter zu Beginn vor allem für industrielle Zwecke interessant sind“, erklärt Alexander Mühlens.
Gemeinsame Fortentwicklung: „Test before Invest“ In der Weiterentwicklung des Iggy Robs zählt igus auf seine Kunden. Der Hersteller bietet bereits vor dem Kauf ein „Test before Invest“-Programm an, bei dem die igus Experten die Potenziale vor Ort evaluieren und Einsatzmöglichkeiten am realen Roboter prüfen. Ist der Test überzeugend, so ist der Iggy Rob zu einem im Marktvergleich niedrigen Kaufpreis von 47.999 Euro erhältlich. „Bisher erhältliche humanoide Roboter kosten teils zwei- oder dreimal so viel“, sagt Mühlens.
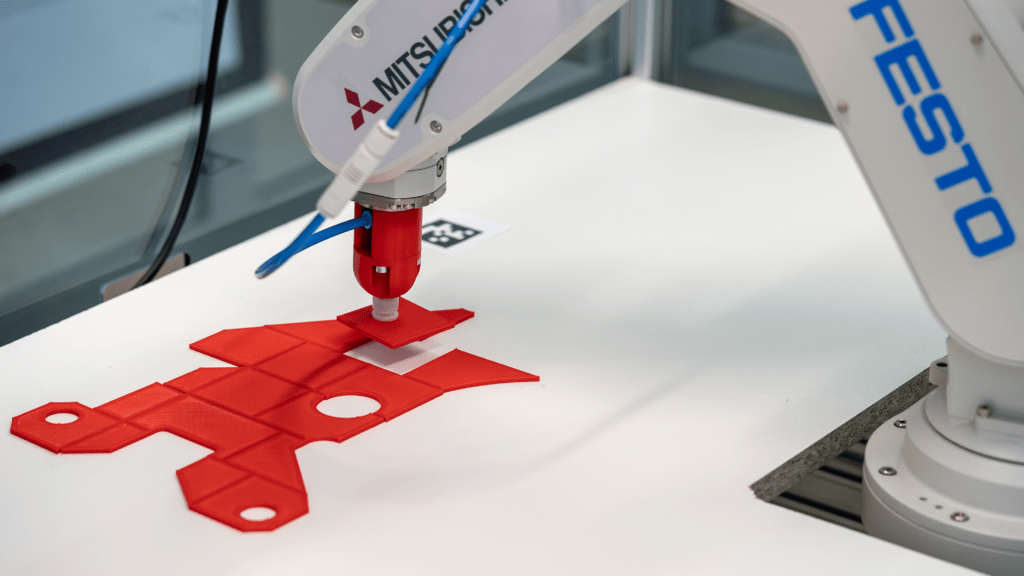
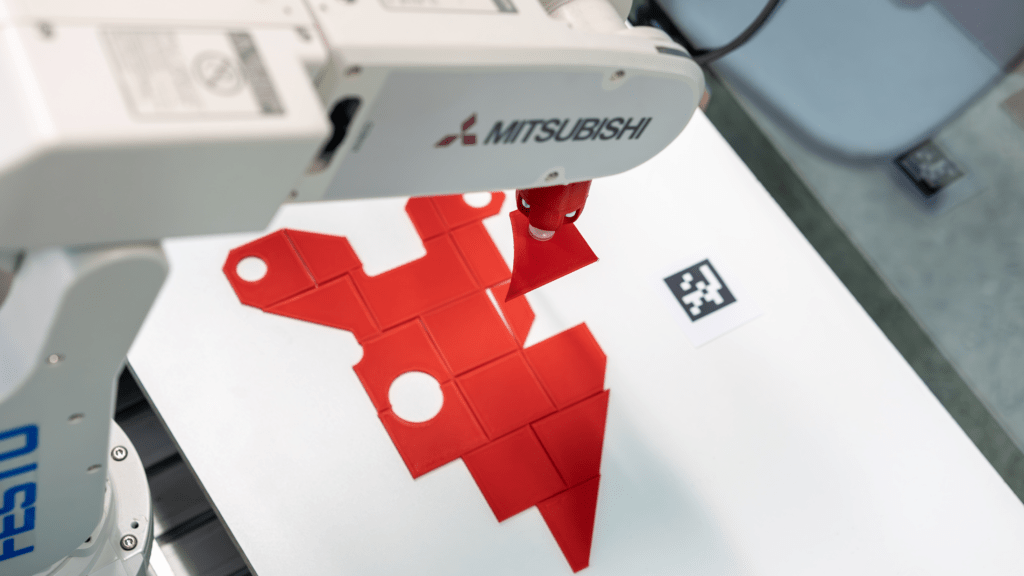
Pick-and-Place-Anwendungen sind ein zentrales Einsatzgebiet der Robotik. Sie werden häufig in der Industrie genutzt, um Montageprozesse zu beschleunigen und manuelle Tätigkeiten zu reduzieren – ein spannendes Thema für Informatik Masteranden des Instituts für datenoptimierte Fertigung der Hochschule Kempten. Sie entwickelten einen Roboter, der Prozesse durch den Einsatz von künstlicher Intelligenz und Computer Vision optimiert. Auf Basis einer Montagezeichnung ist das System in der Lage, einzelne Bauteile zu greifen und an vorgegebener Stelle abzulegen – vergleichbar mit einem Puzzle. Anschließend können die Teile dort manuell durch einen Mitarbeiter verklebt werden.
Zwei IDS Industriekameras liefern die nötigen Bildinformationen
Mithilfe von zwei uEye XC Kameras und einer KI-gestützten Bildverarbeitung analysiert das System die Umgebung und berechnet präzise Aufnahme- sowie Ablagekoordinaten. Eine der Kameras wurde dazu über der Arbeitsfläche platziert, die andere über der Entnahmestelle. Konkret verarbeitet eine KI-Pipeline die Bilder der beiden Kameras in mehreren Schritten, um die exakte Lage und Ausrichtung der Objekte zu bestimmen. Mithilfe der Computer-Vision-Algorithmen und neuronalen Netzen erkennt das System relevante Merkmale, berechnet die optimalen Greifpunkte und generiert präzise Koordinaten für die Aufnahme und Ablage der Objekte. Zudem identifiziert das System die Teile eindeutig, indem es ihre Oberfläche segmentiert und die Konturen mit einer Datenbank abgleicht. Darüber hinaus nutzt es die Ergebnisse, um eine Annäherung an bereits abgelegte Teile zu ermöglichen. Die Automatisierungslösung reduziert damit die Abhängigkeit von Expertenwissen, verkürzt Prozesszeiten und wirkt dem Fachkräftemangel entgegen.
Schnittstelle, Sensor, Baugröße und Preis waren die Kriterien, die für die Wahl des Kameramodells entscheidend waren. Die uEye XC kombiniert die Benutzerfreundlichkeit einer Webcam mit der Leistungsfähigkeit einer Industriekamera. Sie erfordert lediglich eine Kabelverbindung für den Betrieb. Ausgestattet mit einem 13-MP-onsemi-Sensor (AR1335) liefert die Autofokus-Kamera hochauflösende Bilder und Videos. Eine wechselbare Makro-Aufsatzlinse ermöglicht eine verkürzte Objektdistanz, wodurch die Kamera auch für Nahbereichsanwendungen geeignet ist. Auch ihre Einbindung war denkbar einfach, wie Raphael Seliger, Wissenschaftlicher Mitarbeiter der Hochschule Kempten, erklärt: „Wir binden die Kameras über die IDS peak Schnittstelle an unser Python Backend an.“
Zukünftig soll das System durch Reinforcement Learning weiterentwickelt werden – einer Methode des maschinellen Lernens, die auf Lernen durch Versuch und Irrtum beruht. „Wir möchten gerne die KI-Funktionen ausbauen, um die Pick-and-Place Vorgänge intelligenter zu gestalten. Unter Umständen benötigen wir dafür eine zusätzliche Kamera direkt am Roboterarm“, erläutert Seliger. Geplant ist zudem eine automatische Genauigkeitsprüfung der abgelegten Teile. Langfristig soll der Roboter allein anhand der Montagezeichnung alle erforderlichen Schritte eigenständig ausführen können.
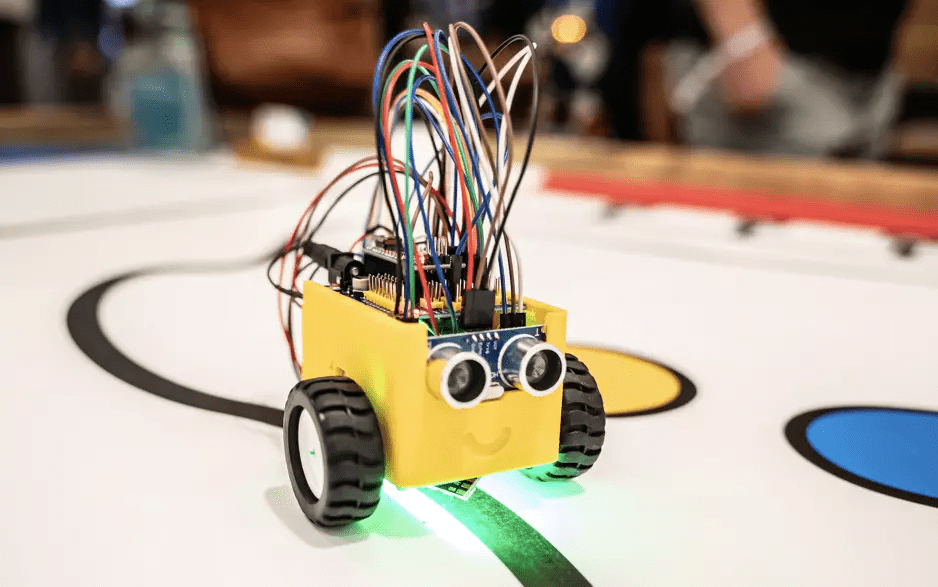
The HP Robots Otto is a versatile, modular robot designed specifically for educational purposes. It offers students and teachers an exciting opportunity to immerse themselves in the world of robotics, 3D printing, electronics and programming. The robot was developed by HP as part of their robotics initiative and is particularly suitable for use in science, technology, engineering and mathematics (STEM) classes.
Key features of Otto:
Modular design: Otto is a modular robot that allows students to build, program and customize it through extensions. This promotes an understanding of technology and creativity. The modular structure allows various components such as motors, sensors and LEDs to be added or replaced, which increases the learning curve for students.
Programmability: The robot can be programmed with various programming languages, including block-based programming for beginners and Python and C++ for advanced programmers. This diversity allows students to continuously improve their coding skills and adapt to the complexity of the tasks.
Sensors and functions: Equipped with ultrasonic sensors for obstacle detection, line tracking sensors and RGB LEDs, Otto offers numerous interactive possibilities. These features allow students to program complex tasks such as navigating courses or tracing lines. The sensors help to detect the environment and react accordingly.
3D printing and customizability: Students can design Otto’s outer parts themselves and produce them with a 3D printer. This allows for further personalization and customization of the robot. This creative freedom not only promotes technical understanding, but also artistic skills. Own parts can be designed and sensors can be attached to desired locations.
Educational approach:
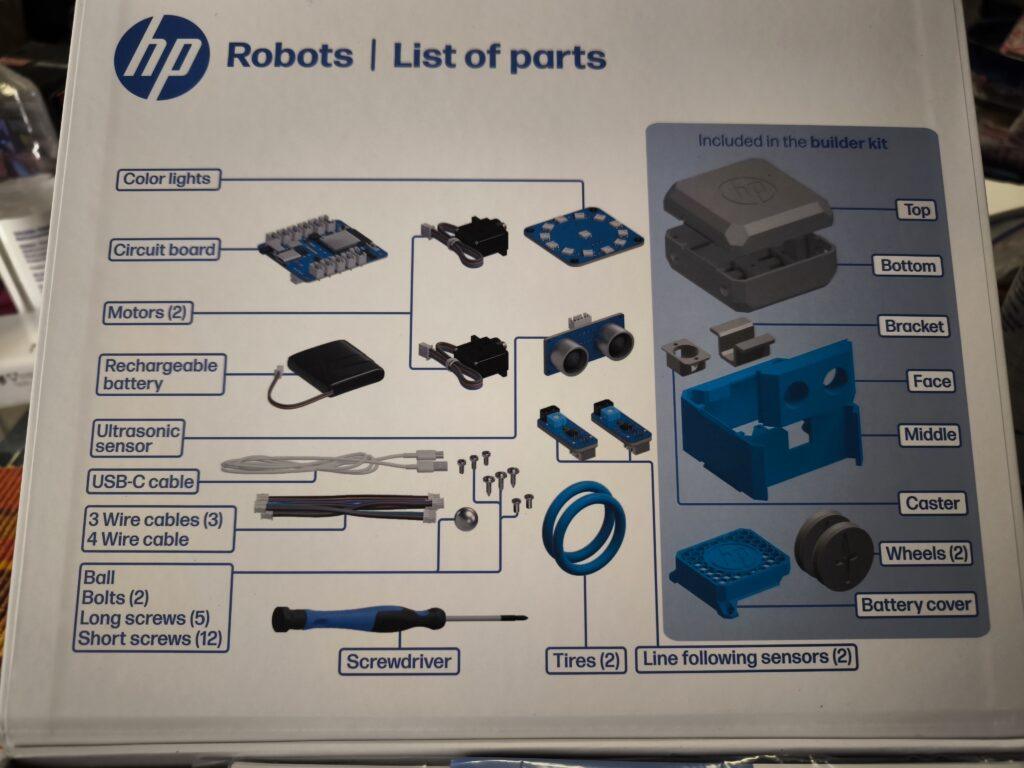
Otto is ideal for use in schools and is aimed at students from the age of 8. Younger students can work under supervision, while older students from the age of 14 can also use and expand the robot independently. The kit contains all the necessary components to build a functioning robot, including motors, sensors, and a rechargeable battery.
Programming environments:
Otto is programmed via a web-based platform that runs on all operating systems. This platform offers different modes:
Block-based programming: Similar to Scratch Jr., ideal for beginners. This visual programming makes it easier to get started in the world of programming and helps students understand basic concepts such as loops and conditions.
Python: A Python editor is available for advanced users. Python is a popular language that works well for teaching because it is easy to read and write. Students can use Python to develop more complex algorithms and expand their programming skills.
C++: Compatible with the Arduino IDE for users who have deeper programming knowledge. C++ offers a high degree of flexibility and allows students to access the hardware directly, allowing for their own advanced projects.
Expansion Kits:
In addition to the Starter Kit, there are several expansion kits. All expansion kits require the starter kit, as they are built on top of it.
Emote Expansion Kit:
It includes components such as an LED matrix display, OLED display, and an MP3 player that allow the robot to display visual and acoustic responses.
This kit is particularly suitable for creative projects where Otto should act as an interactive companion.
The emote kit allows Otto to show emotions, mirror human interactions, and develop different personalities.
Sense Expansion Kit:
With the Sense Kit, Otto can perceive its surroundings through various sensors.
Included are sensors for temperature, humidity, light and noise as well as an inclination sensor. These enable a wide range of interactions with the environment.
The kit is ideal for projects that focus on environmental detection and data analysis.
Interact Expansion Kit:
The Interact kit expands Otto’s tactile interaction capability through modules such as push buttons, rotary knobs and accelerometers.
It enables precise inputs and reactions, as well as measurement of acceleration.
This kit is great for playful activities and interactive games.
Invent Expansion Kit:
The Invent kit is specifically designed to encourage users‘ creativity. It allows the individual adaptation of Otto’s functionalities and design through 3D printing and additional modules as well as compatible clamping blocks.
Users can design and print new accessories to make the robot unique.
Equip Otto with legs and teach him to walk or make him fit for outdoor use off-road with chains.
Use in the classroom:
Otto comes with extensive resources developed by teachers. These materials help teachers design effective STEM lessons without the need for prior knowledge. The robot can be used both in the classroom and at home. The didactic materials include:
Curricula: Structured lesson plans that help teachers plan and execute lessons.
Project ideas and worksheets: A variety of projects that encourage students to think creatively and expand their skills.
Tutorials and videos: Additional learning materials to help students better understand complex concepts.
Conclusion:
The HP Robots Otto is an excellent tool for fostering technical understanding and creativity in students. Thanks to its modular design and diverse programming options, it offers a hands-on learning experience in the field of robotics and electronics. Ideal for use in schools, Otto provides teachers with a comprehensive platform to accompany students on an exciting journey into the world of technology. In particular, Otto’s versatility through the 3D-printed parts and expansion packs offers the opportunity to build the personal learning robot.
Hannover, 25. März 2025 ‒ Was in einer kalifornischen Garage begann, prägt heute die globale Innovationslandschaft: 2025 feiert das US-Make-Magazin sein 20-jähriges Bestehen und gleichzeitig die Maker-Bewegung als bedeutenden Treiber der digitalen Transformation. Die deutsche Maker Faire in Hannover ist nach San Francisco und Rom zur drittgrößten weltweit gewachsen und lockte in über 10 Jahren mehr als 140.000 Besucher an.
„Die Maker-Bewegung existierte schon immer, aber erst das Make Magazin gab ihr 2005 einen Namen und eine Identität”, erklärt Dale Dougherty, Gründer des US-Make-Magazins. Was als Zeitschrift begann, entwickelte sich schnell zu einem globalen Phänomen: Seit der ersten Maker Faire 2006 fanden weltweit 1.497 Events mit über 131.000 ausstellenden Makern und mehr als 7,6 Millionen Teilnehmern statt.
Die deutsche Erfolgsgeschichte begann 2011 mit „c’t Hardware Hacks”, dem Vorläufer des heutigen Make-Magazins . „Die Maker-Bewegung hat eine neue Form der Produktionsorganisation etabliert, die auf Internet und Peer-Netzwerken basiert. Durch den offenen Zugang zu digitalen Fertigungstechnologien ist eine moderne, demokratische Innovationskultur entstanden”, erklärt Daniel Bachfeld, Chefredakteur des deutschen Make-Magazins. „Jeder kann heute mit 3D-Druckern, Laser-Cuttern und Open-Source-Elektronik eigene Produkte entwickeln und herstellen.“
In FabLabs und Makerspaces entstehen neue Produktionsinfrastrukturen, die intelligente Robotik mit kollaborativen Arbeitsweisen verbinden. Der „Do-It-With-Others”-Ansatz führt zu einer dezentralen, lokalen Fertigung. Dabei entwickeln sich flexible Wertschöpfungsketten, die durch moderne Software gesteuert werden.
r2_builders_club Bild: MakerMedia
Die Bewegung prägt auch die Bildungslandschaft: „Making verbindet digitale und handwerkliche Fähigkeiten und fördert kreative Problemlösung”, sagt Bachfeld. Immer mehr Schulen und Universitäten integrieren Maker-Projekte in ihre Lehrpläne oder eröffnen genau wie viele Bibliotheken eigene Makerspaces.
Auch im Make-Magazin wird der Bildungsansatz forciert: In Kooperation mit dem Schweizer Hersteller Oxon entstand beispielsweise das Make Innovators Kit mit Playbook. Gemeinsam mit dem Umweltcampus der Hochschule Trier wurde das Makey:Lab entwickelt, das Schülern ab 14 Jahren den Einstieg in digitale Umweltforschung und Programmierung ermöglicht.
Die Maker Faire Hannover hat sich seit 2013 als inspirierender Ideenpool etabliert. „Der Mix aus Wissenschaftsmesse und buntem DIY-Festival bringt Menschen jeden Alters und Hintergrunds zusammen, um die vielseitigen Kreationen zu präsentieren oder zu bestaunen – von selbstgebauten Robotern bis zu kinetischen Skulpturen”, unterstreicht Daniel Rohlfing, Leiter Events & Sales Maker Faire Deutschland. “Auch die MINT-Bildung kommt nicht zu kurz. Kinder und Jugendliche werden auf der Maker Faire für die digitale Welt, IT, KI und Technik nachhaltig begeistert”.
Iron Horse (Highlight)Bild: Maker Media
Seit vielen Jahren übernimmt das Bundesbildungsministerium die Schirmherrschaft für die Maker Faire, für Rohlfing ein großes Zeichen der Wertschätzung. Die nächste Maker Faire Hannover findet am 23. und 24. August 2025 im Hannover Congress Centrum statt, der Call for Makers ist noch bis Ende Mai geöffnet, auch Unternehmen können sich für eine Teilnahme anmelden.
Linien-RoboterBild: Maker Media
Im DACH-Raum wächst die Bewegung ebenfalls: Die Maker Faire Ruhr lädt für den 29. und 30. März in die DASA Arbeitswelt Ausstellung nach Dortmund ein. In der Schweiz öffnet die Maker Faire Solothurn am 28. und 29. Juni 2025 ihre Tore in der Enter Technikwelt.
Wittekindshofer Werkstätten realisieren behindertengerechten Arbeitsplatz mit Low-Cost-Roboter für 4.970 Euro
Köln, 10. April 2025 – Daniel Hillebrand leidet an einer Tetraspastik, die eine kontrollierte Bewegung der Extremitäten unmöglich macht. Trotzdem kann er selbstbestimmt arbeiten – dank eines automatisierten Arbeitsplatzes, den die Diakonische Stiftung Wittekindshofer Werkstätten aus Bad Oeynhausen trotz engen Budgets mit einem Low-Cost-Roboter von igus realisiert hat. Für dieses kreative Inklusionsprojekt erhielt die Stiftung jetzt den ROIBOT Award. Der Wettbewerb zeichnet innovative und wirtschaftliche Automatisierungsprojekte aus, die mithilfe von igus Produkten erfolgreich umgesetzt wurden. Zu den weiteren Preisträgern zählen das niederländische Unternehmen Paperfoam, das französische Forschungsinstitut CNRS und die Universität Politecnico aus Mailand.
Daniel Hillebrand sitzt im Rollstuhl und bewegt mit seinem Kinn einen Joystick. Damit steuert er einen Roboterarm, der Kunststoffbauteile sortiert. Mehrere Stunden pro Tag, ohne fremde Hilfe. „Daniel ist es gewohnt, in seinem Leben fast vollständig auf Hilfe angewiesen zu sein“, sagt Torsten Jeschke, Elektriker und Erzieher in den Wittekindshofer Werkstätten. „Dank der neuen Anlage kann er nun trotz seiner schweren Lähmung selbstbestimmt arbeiten.“ Das sei für ihn der Himmel auf Erden. „Der Roboter ist cool“, bestätigt Daniel Hillebrand. „Ich musste in die Technik erst reinkommen, aber mittlerweile läuft alles richtig gut. Am schönsten ist es, wenn der Sack nach langer Arbeit voll ist.“
„Ein Automationsprojekt, das für uns bei igus besonders ergreifend ist.“ Marktübliche Industrieroboter wären für die Wittekindshofer Werkstätten unerschwinglich und in der Steuerung zu komplex gewesen. Jeschke hat deshalb eine günstigere Lösung zusammengestellt, die sich ähnlich leicht bedienen lässt wie ein Computerspiel – mithilfe der Low-Cost-Robotik-Plattform RBTX von igus. Herzstück und Daniel Hillebrands Armersatz ist dabei der ReBeL, ein Gelenkarmroboter aus Hochleistungskunststoff für nur 4.970 Euro. igus hatte den ROIBOT-Wettbewerb zum mittlerweile dritten Mal ausgeschrieben, um Unternehmen und Organisationen auszuzeichnen, die mithilfe des RBTX-Marktplatzes besonders smarte und wirtschaftliche Automationsprojekte realisieren. Die Gewinner erhalten Gutscheine für Robotik-Hardware im Wert von bis zu 5.000 Euro. „Für uns ist es wirklich ergreifend zu sehen, wie es die Wittekindshofer Werkstätten geschafft haben, mit begrenzten finanziellen Ressourcen und dafür umso mehr Fantasie ein Automationsprojekt auf die Beine zu stellen, welches das Leben eines Menschen so sehr verbessert. Wir hoffen, dass sie den 5.000 Euro-Gutschein nutzen können, um in Zukunft noch weitere Projekte dieser Art umzusetzen“, sagt Alexander Mühlens, Leiter des Geschäftsbereichs Low-Cost-Automation bei igus und Schirmherr der ROIBOT Awards. igus selbst hat die Good Work Charter des Verband Deutscher Maschinen- und Anlagenbauer unterschrieben und sich damit dem positiven Beitrag von Robotik zur Gesellschaft verpflichtet. Die Charta betont, dass Robotik und Automatisierungstechnologien nicht nur die Produktivität steigern, sondern auch das Leben der Menschen verbessern können, indem sie Arbeitsbedingungen optimieren und neue Möglichkeiten schaffen.
Die weiteren Preisträger: Roboterkomponenten für die Qualitätssicherung, Astroteilchenphysik und automatisierte Obsternte Platz zwei und 2.500 Euro für Robotik-Hardware gehen an Paperfoam. Die niederländische Firma hat den Gelenkarmroboter ReBeL von igus mit einer Kamera ausgestattet, um ihre biobasierten und recycelbaren Verpackungen stichprobenweise auf Produktionsfehler zu prüfen. Die Lösung reduziert die körperliche Belastung der Mitarbeiter und erhöht gleichzeitig die Qualität der Produktion. Über Platz drei und 1.000 Euro freut sich das französische Forschungsinstitut Centre national de la recherche scientifique (CNRS) für die Entwicklung einer Kalibriervorrichtung eines Teleskops für die Astroteilchenphysik. Durch den Einsatz von schmierfreien Linearachsen von igus erreichen die Konstrukteure eine hohe Präzision und Wartungsfreundlichkeit. Der Sonderpreis für Bildungseinrichtungen und ebenfalls 1.000 Euro gehen an die wissenschaftliche-technische Universität Politecnico in Mailand. Sie hat mit dem ReBeL Roboterarm einen mobilen Manipulator konstruiert, der die Obsternte durch Automatisierung effizienter und weniger arbeitsintensiv gestaltet. „Die Gewinner beweisen, dass Automation heute nicht mehr nur eine Frage des Geldes ist“, so Mühlens abschließend. „Auch mit kleinen Budgets und Kreativität lassen sich wirtschaftliche Automationslösungen mit einem schnellen Return on Invest realisieren. Wir freuen uns schon darauf weitere spannende und kostengünstige Automatisierungsprojekte beim nächsten ROIBOT Award kennenzulernen.“
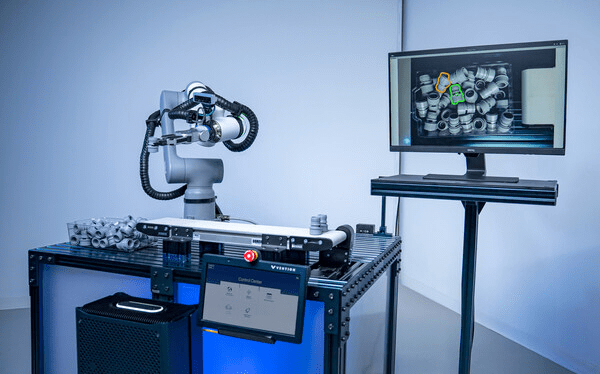
SAN JOSÉ, Kalifornien, 18. März 2025 /PRNewswire/ — Vention, Entwickler der weltweit einzigen Full-Stack-Software- und Hardware-Automatisierungsplattform, präsentiert seine KI-gestützte Bin-Picking-Technologie erstmals auf der NVIDIA GTC, der weltweit führenden Entwicklerkonferenz für Künstliche Intelligenz (KI).
Dieses neue, KI-gesteuerte Verfahren ersetzt aufwendige und kostenintensive individuelle Programmierlösungen und erleichtert Unternehmen die Einführung von Automatisierungstechnologie. Die Markteinführung der KI-gestützten Bin-Picking-Technologie ist im weiteren Verlauf des Jahres geplant.
In einer Live-Demonstration wird ein ABB GoFa™ CRB 15000-Roboter – ausgestattet mit einem Vision-System, Finger-Greifern und verbunden mit einem Vention MachineMotion AI-Controller – seine autonomen Fähigkeiten unter Beweis stellen. Mithilfe einer hochgeladenen CAD-Datei des zu verarbeitenden Bauteils versteht der Roboter, wie er das Bauteil erkennen, auswählen, greifen und mit branchenführender Präzision organisieren kann. Diese autonome Funktionalität wird durch leistungsstarke KI-Modelle ermöglicht.
„KI entwickelt sich in rasantem Tempo weiter und hilft Vention dabei, Automatisierung für Unternehmen jeder Größe noch zugänglicher zu machen“, erklärt Etienne Lacroix, Gründer und CEO von Vention. „Unsere neueste Innovation, die Hardware-Integration mit NVIDIA-KI-Modellen kombiniert, geht über reines Identifizieren und Greifen hinaus – sie fügt Intelligenz und Organisation hinzu, wodurch teure Integrations- und Programmieraufwände reduziert werden. Das macht Bin-Picking-Automatisierung für Hersteller erschwinglicher.“
„Generative KI und Simulationstechnologien haben einen Wendepunkt erreicht, um physische KI-Anwendungen in der Produktion voranzutreiben“, sagt Deepu Talla, VP of Robotics bei NVIDIA. „Mit der NVIDIA Isaac Robotics-Plattform bringt Vention die neuesten KI-Innovationen in Fabriken jeder Größe – sowohl für High-Mix- als auch für High-Volume-Fertigung.“
Entdecken Sie hier das KI-gestützte Bin-Picking-Demo-Video.
KI zur Lösung realer Herausforderungen
Die Demonstration ist Teil eines laufenden Entwicklungsprojekts mit McAlpine & Co. Ltd, einem langjährigen Vention-Kunden und führenden britischen Hersteller von Sanitärprodukten mit über 100 Jahren Erfahrung. Das Unternehmen sucht nach einer Automatisierungslösung für Bin-Picking und Maschinenbestückung.
John Gordon, General Manager von McAlpine & Co. Ltd, betont die Herausforderungen, die mit der Automatisierung des Bin-Picking-Prozesses verbunden sind, obwohl es sich auf den ersten Blick um eine einfache Aufgabe handelt: „McAlpine & Co. Ltd war auf der Suche nach einem Automatisierungspartner, dem wir vertrauen können, um unsere Vision umzusetzen: innovative Lösungen, die unseren hohen Qualitätsstandards entsprechen. Im Zentrum dieser Vision steht eine kollaborative Arbeitsumgebung, in der Maschinen arbeitsintensive und repetitive Aufgaben übernehmen, sodass sich unsere Mitarbeiter auf wertschöpfende Tätigkeiten konzentrieren können. Nach dem erfolgreichen Abschluss unseres ersten Automatisierungsprojekts mit Vention sind wir überzeugt, dass nun der richtige Zeitpunkt gekommen ist, um gemeinsam eine hochmoderne, KI-gestützte Bin-Picking-Lösung zu entwickeln.“
Vention Intelligence – Schnellere Wertschöpfung für Hersteller
Der MachineMotion AI-Controller von Vention, basierend auf der NVIDIA Jetson Orin Module-on-Compute-Plattform, bildet das Rückgrat der neuen Entwicklung – er ermöglicht die Echtzeitverarbeitung, die für eine autonome Bin-Picking-Automatisierung im industriellen Maßstab erforderlich ist. Dieses Steuerungssystem geht über herkömmliche SPS-basierte Automatisierung hinaus und verkürzt die Implementierungszeit erheblich.
Durch die Integration modernster, KI-gestützter NVIDIA Isaac CUDA-Bibliotheken und Modelle wie FoundationPose stellt Vention sicher, dass Hersteller von den neuesten KI-Fortschritten profitieren, die jetzt in den Markt eintreten.
„Unsere Strategie, KI-Technologien nahtlos in bestehende Automatisierungslösungen zu integrieren, stellt sicher, dass wir neue Modelle schnell in unsere schlüsselfertigen und anpassbaren Arbeitszellen einbinden können – und damit unseren Kunden aus der Fertigungsindustrie einen Wettbewerbsvorteil verschaffen.“ – François Giguère, Chief Technology Officer bei Vention.