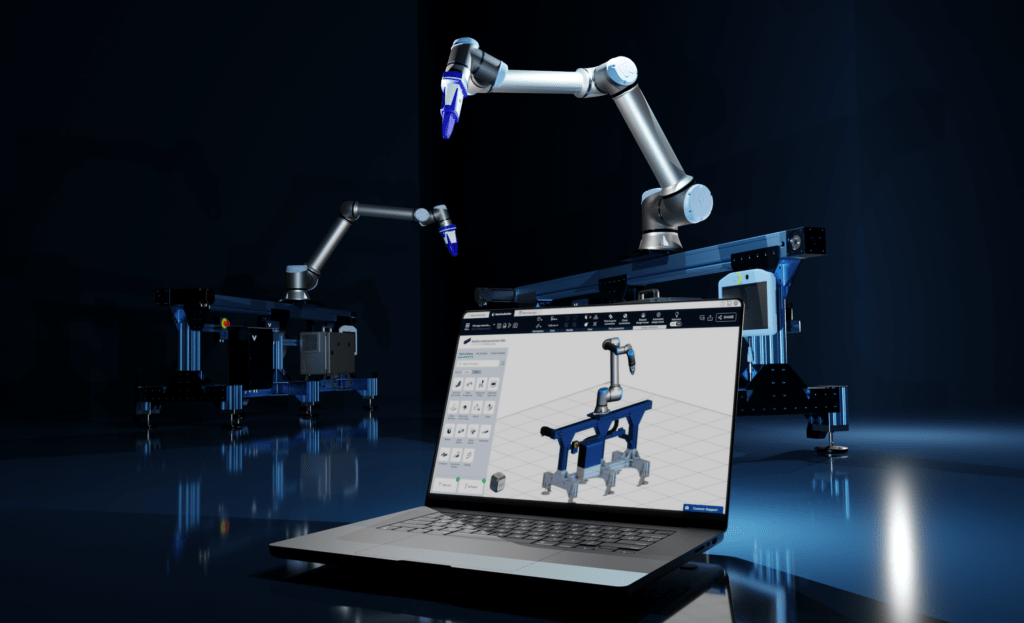
Montreal/Berlin, 18. September 2024 – Vention, das Unternehmen hinter der cloud-basierten Manufacturing Automation Platform (MAP), stellt auf seinem heutigen Demo Day in Berlin eine neue KI-Anwendung vor. MachineMotion AI ist der erste KI fähige Automatisierungscontroller mit beschleunigter Computertechnologie von NVIDIA.
Als Herzstück des Hardware- und Software-Ökosystems von Vention schließt MachineMotion AI die Lücke zwischen herkömmlichen speicherprogrammierbaren Steuerungen (SPS) und modernen Roboterprogrammierumgebungen. Der Controller der dritten Generation wurde entwickelt, um die Konzeption und Bereitstellung von Roboteranwendungen für produzierende Unternehmen jeder Größe erheblich zu vereinfachen.
MachineMotion AI basiert auf der NVIDIA Jetson-Plattform für Edge-KI und -Robotik. Der Controller entwickelt KI-fähige Roboter mit NVIDIA GPU-beschleunigter Pfadplanung weiter und bietet die Möglichkeit, 2D-/3D-Wahrnehmungsmodelle auszuführen, die in synthetischen und physischen Umgebungen trainiert wurden.
MachineMotion AI ist mit führenden Robotermarken (z.B. Universal Robots, FANUC und ABB) kompatibel und lässt sich per Plug-and-Play mit Hunderten von Bewegungsgeräten und Sensoren verbinden – von Förderbändern und Aktuatoren bis hin zu Sicherheitsgeräten, Computer-Vision-Systemen, Telepräsenzkameras und mehr.
„Wir sind auf dem Weg, die industrielle Automatisierung zu demokratisieren und bauen dabei das umfassendste Unternehmen für industrielle Automatisierung und Robotik auf. Die heutigen Ankündigungen festigen Ventions Position als intuitivste Plattform für Automatisierung und Robotik und zeigen gleichzeitig die fortschrittlichen Funktionen, die Experten in der Branche benötigen“, sagt Etienne Lacroix, Gründer und CEO von Vention.
Weitere Informationen zu der Zusammenarbeit mit NVIDIA finden Sie hier. Demo Day in Berlin (18.9.)
Der diesjährige europäische Demo Day findet am 18.9. ab 14 Uhr in der Vention Europazentrale in Berlin statt. Etienne Lacroix, Gründer und CEO von Vention, wird vor Ort sein und für Pressegespräch zur Verfügung stehen. Mehr Informationen zum Event in Berlin finden Sie hier.
Über Vention
Vention hilft Unternehmen, ihre Produktionsbereiche durch eine demokratisierte Benutzererfahrung in nur wenigen Tagen zu automatisieren. Mit der digitalen Fertigungsautomatisierungsplattform MAP von Vention können Kunden automatisierte Geräte direkt über ihren Webbrowser entwerfen, bestellen und bereitstellen. Vention hat seinen Hauptsitz in Montreal und Niederlassungen in Berlin und Boston. Die über 300 Mitarbeiter betreuen mehr als 4.000 Kunden auf fünf Kontinenten und in 25 Fertigungsindustrien.
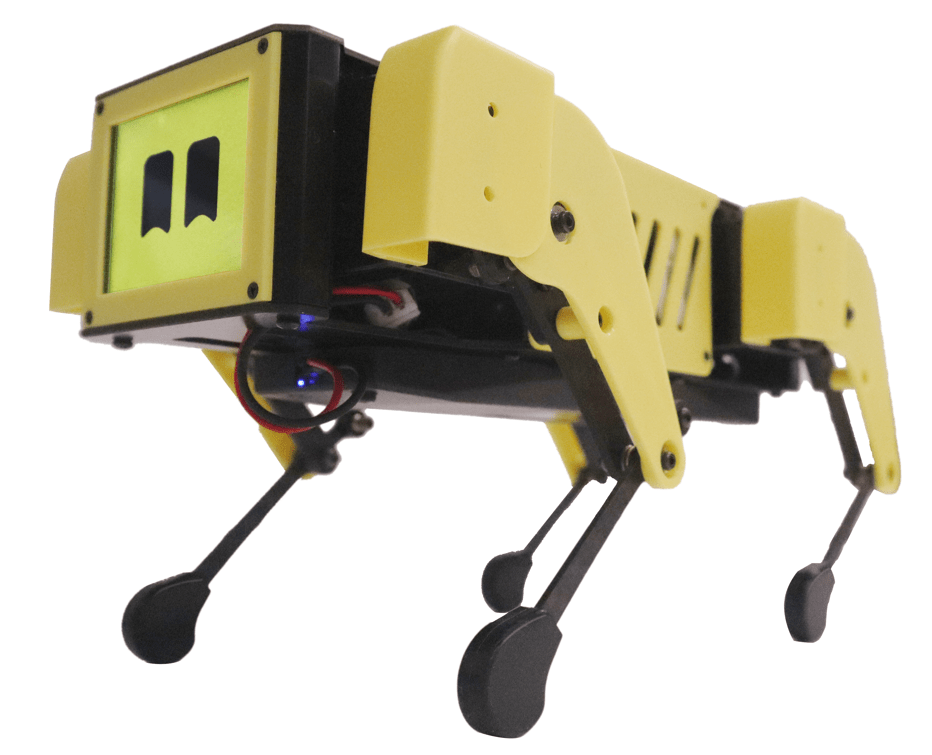
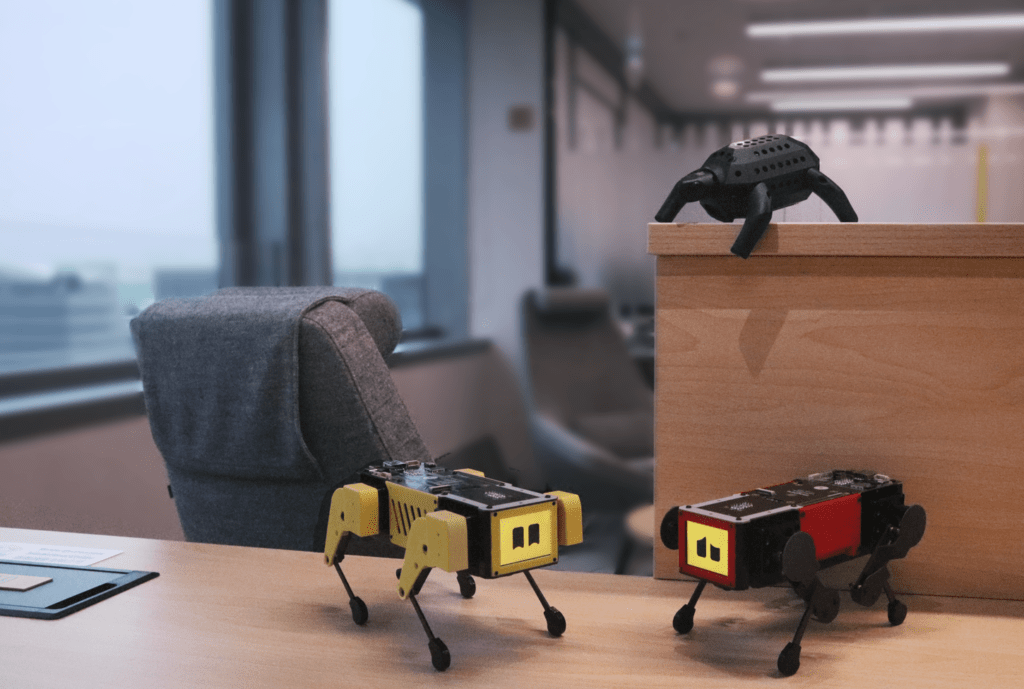
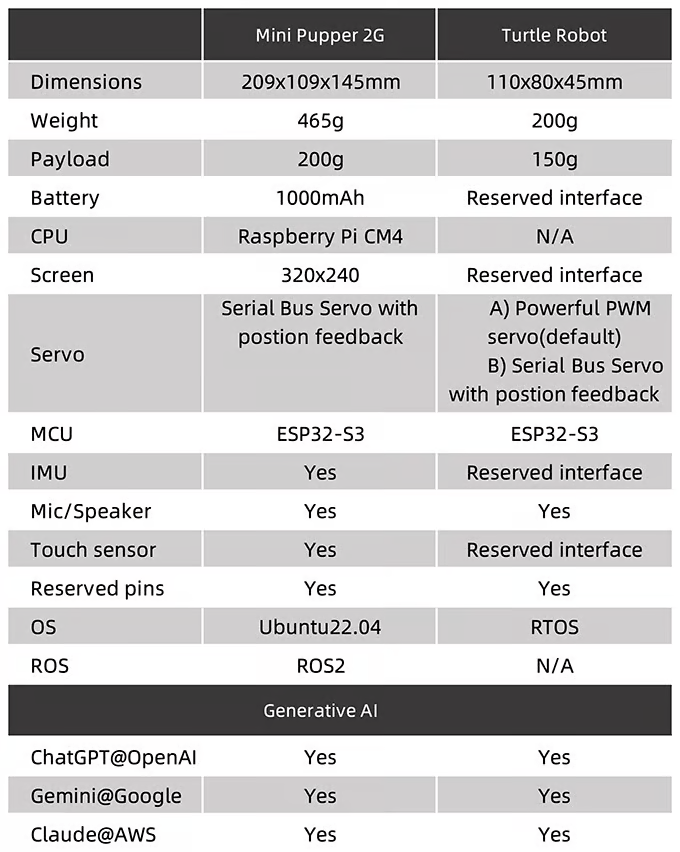
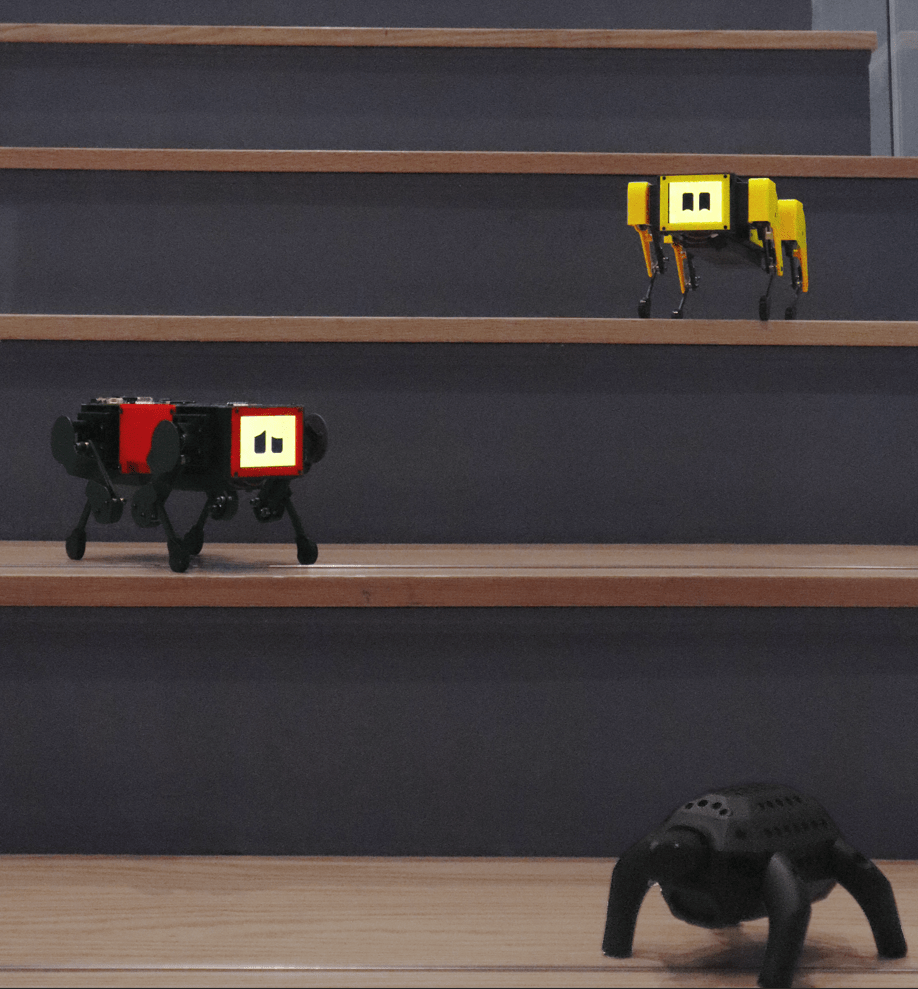
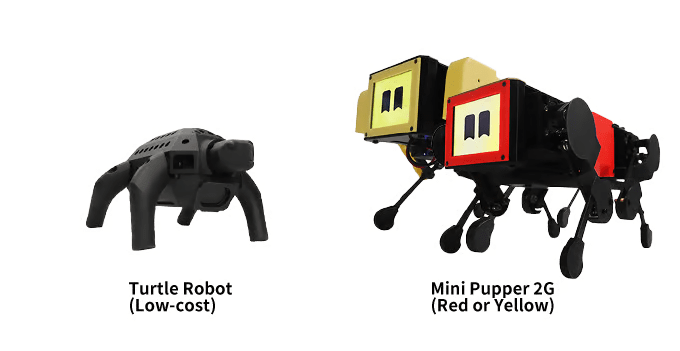
The first robot, the Mini Pupper, is available in several versions, including Mini Pupper 1, Mini Pupper 2, and the 2G and 2GA models. This robot is a low-cost, personal quadruped kit that comes with open-source software. The Mini Pupper supports multimodal generative AI platforms such as OpenAI’s ChatGPT, Google’s Gemini, and AWS’s Claude. It is also compatible with ROS1 and ROS2, which expands its capabilities in the areas of SLAM (Simultaneous Localization and Mapping) and navigation. The integration of OpenCV allows the robot to perform deep learning with cameras. Thanks to the use of Raspberry Pi and Arduino, the Mini Pupper offers high adaptability and expandability, making it ideal for developers who want to realize their own projects.
The second robot presented is the Turtle Robot, which will be available soon. This robot is specifically aimed at schools, homeschooling families, and robot enthusiasts. While detailed specifications have not yet been fully released, it is clear that the Turtle Robot also aims to support learning and creativity in the field of robotics.
The campaign itself has set a funding goal of 9000€ and has clearly exceeded it with a sum of just under 19000€, which corresponds to over 200% of the original goal. The campaign runs from September 5, 2024 to October 5, 2024 and has attracted 80 supporters so far. A standout feature of the MD Robot Kits is their open-source nature, which allows users to assemble the robots in less than an hour. This makes them particularly accessible to a wide range of audiences, ranging from educational institutions to DIY enthusiasts. The project is designed not only to impart technical knowledge, but also to promote the joy of creating and customizing robots.
1. Mini Pupper:
Versions: Mini Pupper 1 (2021), Mini Pupper 2 (2022), Mini Pupper 2G & 2GA.
Design: A low-cost, personal quadruped kit with open-source software.
Features: Supports multimodal generative AI such as OpenAI’s ChatGPT, Google’s Gemini, and AWS’s Claude. It is compatible with ROS1 and ROS2 for SLAM & navigation and is based on OpenCV for deep learning with cameras.
Extensibility: Uses Raspberry Pi and Arduino, which allows for high adaptability.
Open-source platform: The Mini Pupper supports the Robot Operating System (ROS) and offers features such as SLAM (Simultaneous Localization and Mapping) and navigation. It is equipped with lidar and camera sensors that allow it to map its surroundings and move autonomously
Technical specifications: The robot has 12 degrees of freedom, made possible by advanced servo motors. These motors provide feedback on acceleration and force, which allows precise control.
Hardware and expandability: The Mini Pupper uses the Raspberry Pi 4B or the Raspberry Pi Compute Module 4 as the central processing unit and is equipped with an ESP32 as a microcontroller. It has an IPS display with a resolution of 240 x 320 pixels, a microphone, speakers and a touch sensor.
Adaptability: Thanks to its open-source nature, the Mini Pupper can be modified deeply. Users can add their own modules and customize the robot for different projects, such as tracking objects in space.
Education and community: The Mini Pupper is ideal for schools and homeschooling families. It comes with comprehensive guidance and resources to help you get started with robotics. Users can become part of a global community to share ideas and get support.
Price and availability: As part of the Kickstarter campaign, the Mini Pupper will be offered in different versions, with the base model costing around 479 euros. Delivery is scheduled to begin in February, with supporters aware of the financial risk of crowdfunding campaigns.
2. Turtle Robot:
Open-source project: The Turtle Robot is based on Arduino and is an open-source project that supports the integration of generative AI. This allows users to customize and expand the robot.
Affordability: The Turtle Robot is a low-cost learning platform for multimodal generative AI and comes at an introductory price of 60% off $99. This makes it particularly attractive to educational institutions and DIY enthusiasts.
Ease of use: The robot is designed to be set up and put into operation within a week. This makes it easier for beginners to start learning and experimenting quickly.
Support and resources: MangDang offers comprehensive support across multiple channels, as well as access to all code and design files via a GitHub repository. Users can print the STL design files and contribute their own ideas.
Multimodal Generative AI: The Turtle Robot uses advanced AI technologies that enable continuous voice interactions. The AI can remember previous conversations and give personalized answers based on them.
Application examples: There are two Arduino projects that can be used with the Turtle Robot: one for testing individual functions and another that performs all functions via voice control.
Availability: The Turtle Robot was available as part of the Kickstarter campaign until October 2024 and will be available in an online store after that.
VEX Robotics hat VEXcode für ein neues Jahr des Programmierens aktualisiert! VEXcode 4.0 für VEX IQ,VEX EXP und VEX V5 bringt den Benutzern einige aufregende neue Funktionen! Diese Bemühungen zielen darauf ab, die Benutzererfahrung zu optimieren und zusätzliche Optionen für die Barrierefreiheit zu unterstützen. Entdecken Sie die neuen Funktionen für jede Plattform unten und in den begleitenden VEX Library-Artikel!
Neue Funktionen in VEXcode IQ 4.0
VEXcode IQ 4.0 führt wichtige Updates ein. Zu den bemerkenswerten Ergänzungen gehören Switch Blocks, die einen nahtlosen Übergang von blockbasierter zu textbasierter Codierung auf einem physischen Roboter ermöglichen, verbesserte Speicher- und Ladefunktionen für webbasierte VEXcodeund neue Barrierefreiheitsoptionen wie „Blöcke vorlesen“. Diese Updates wurden entwickelt, um die Benutzererfahrung zu optimieren und Anfänger und fortgeschrittene Benutzer zu unterstützen.
VEXcode EXP 4.0 bietet umfassende Updates, die das Bildungserlebnis für Lehrer und Schüler verbessern sollen. Diese Version bietet volle Unterstützung für den CTE Workcell, der eine nahtlose Integration von Industrierobotik in den Unterricht ermöglicht. Die neue Funktion „Blöcke wechseln“ ermöglicht einen reibungslosen Übergang von blockbasierter zu textbasierter Codierung und erleichtert so fortgeschrittenes Lernen. Darüber hinaus ermöglichen webbasierte drahtlose Projekt-Downloads effizientere Arbeitsabläufe, indem sie es Benutzern ermöglichen, direkt über ihren Webbrowser eine Verbindung zu einem EXP Brain herzustellen. Verbesserte Barrierefreiheitsfunktionen wie (Vor-)Leseblöcke,anpassbare Stimmen und kontrastreiche Themen machen VEXcode inklusiver und benutzerfreundlicher. Der aktualisierte AI Vision Sensor unterstützt jetzt AprilTags und AI Classifications, wodurch die autonomen Fähigkeiten verbessert werden. Mit diesen Verbesserungen unterstützt VEXcode EXP 4.0 weiterhin eine breite Palette von Bildungsanforderungen, von Anfängern bis hin zu fortgeschrittenen Roboterprogrammierungen.
VEX Robotics updated VEXcode for a new year of coding! VEXcode 4.0 for VEX IQ, VEX EXP, and VEX V5 brings users some exciting new features! These efforts aim to streamline user experience and support added accessibility options. Explore the new features for each platform below and in their accompanying VEX Library articles!
New Features in VEXcode IQ 4.0
VEXcode IQ 4.0 introduces major updates. Notable additions include Switch Blocks, which enable a seamless transition from block-based to text-based coding on a physical robot, enhanced save and load features for web-based VEXcode, and new accessibility options like Read Blocks Aloud. These updates are designed to streamline the user experience and support beginners and advanced users.
VEXcode EXP 4.0 offers comprehensive updates designed to elevate the educational experience for teachers and students. This release includes full support for the CTE Workcell, enabling seamless integration of industrial robotics into the classroom. The new Switch Blocks feature allows for a smooth transition from block-based to text-based coding, facilitating advanced learning. Additionally, web-based wireless project downloads enable more efficient workflows by allowing users to connect to an EXP Brain directly from their web browser. Enhanced accessibility features like Read Blocks Aloud, customizable voices, and high-contrast themes make VEXcode more inclusive and user-friendly. The updated AI Vision Sensor now supports AprilTags and AI Classifications, enhancing autonomous capabilities. With these enhancements, VEXcode EXP 4.0 continues to support a wide range of educational needs, from introducing beginners to advanced robotic programming.
Guess what? There’s a new robot in town: Argo, the AI Smart Companion Robot for your home! „How is it possible that in 2024 we still don’t have personal robots in our homes?“
This very question sparked the creation of Argo. And who better to tackle this challenge than three innovators who have built driverless cars, drones, rockets, and space robotic arms? Their vision: to create the smart personal home robot we’ve been waiting for!
Argo excels in three main areas:
● INTELLIGENCE: ChatGPT-level conversational abilities, smart home integration (domotics) and autonomous navigation to move and follow you around your home.
● SECURITY: 24/7 video surveillance, autonomous patrolling to check every room, motion detection for intruders, and even gas leak monitoring.
● ENTERTAINMENT: From playing your favorite music to autonomously delivering drinks, Argo makes everyday life more enjoyable, with fun features like the morning alarm or the ed-tech games for your kids.
But that’s just the start. To explore all of Argo’s features, visit their website: argorobot.it.
The intuition behind Argo is that today we still have basic vocal assistants, static boxes used just to set timers, play music. In some years, we will have humanoid robots doing laundry and cooking for us. Will we switch overnight from Alexa to fully humanoid robots? Probably not. Argo is that essential step in between, and it will keep evolving day by day.
So Argo isn’t just „Alexa on wheels.“ With its mobility, interactive animations and true conversational AI, Argo delivers an entirely different user experience: one that feels more alive and engaging than simply talking to a static device.
As the famous roboticist Tomotaka Takahashi once said: „Having people talk to a brick doesn’t work, which is why Siri hasn’t succeeded.“
So Argo is an interactive companion, your AI chatty buddy and your infinite source of knowledge!
Sure, we’ve seen other unfortunate attempts in home robots before, like Kuri or Jibo, which were true pioneers. However, the technology back then wasn’t quite there. AI, LLMs and autonomous navigation systems were still in their infancy. Today, we have the tools to push the boundaries even further and at a fraction of the cost.
When you compare Argo to other robots on the market like Vector or Loona, while impressive, they tend to lean more toward toy-like design and functionality. And then there’s Amazon Astro, a high-tech marvel, but at $1,600 its price tag doesn’t align with the value it offers. Argo strikes the perfect balance: it’s more sophisticated, less of a toy and significantly more affordable, targeting a $499 price point.
We’re seeing tech giants like Amazon and Apple (project J595) getting serious about this space, and it’s clear that smarter home robots are coming. Argo is here to be part of that revolution!
Do you want to share your ideas about home robots? Fill this quick survey to help Argo guys to craft the best home robot for you: https://forms.gle/MmNLc15wH5invino9
Der erste Roboter, der Mini Pupper, ist in mehreren Versionen erhältlich, darunter Mini Pupper 1, Mini Pupper 2 sowie die Modelle 2G und 2GA. Dieser Roboter ist ein kostengünstiges, persönliches Quadruped-Kit, das mit Open-Source-Software ausgestattet ist. Der Mini Pupper unterstützt multimodale generative KI-Plattformen wie ChatGPT von OpenAI, Gemini von Google und Claude von AWS. Zudem ist er mit ROS1 und ROS2 kompatibel, was seine Fähigkeiten in den Bereichen SLAM (Simultaneous Localization and Mapping) und Navigation erweitert. Die Integration von OpenCV ermöglicht es dem Roboter, Deep Learning mit Kameras durchzuführen. Dank der Nutzung von Raspberry Pi und Arduino bietet der Mini Pupper eine hohe Anpassungsfähigkeit und Erweiterbarkeit, was ihn ideal für Entwickler macht, die ihre eigenen Projekte realisieren möchten.
Der zweite vorgestellte Roboter ist der Turtle Robot, der bald verfügbar sein wird. Dieser Roboter richtet sich speziell an Schulen, Homeschooling-Familien und Roboter-Enthusiasten. Während detaillierte Spezifikationen noch nicht vollständig veröffentlicht wurden, ist klar, dass der Turtle Robot ebenfalls darauf abzielt, das Lernen und die Kreativität im Bereich der Robotik zu unterstützen.
Die Kampagne selbst hat ein Finanzierungsziel von 9000€ gesetzt und dieses mit einer erreichten Summe von knapp 19000€ , was über 200% des ursprünglichen Ziels entspricht, deutlich übertroffen. Die Kampagne läuft vom 5. September 2024 bis zum 5. Oktober 2024 und zog bisher 80 Unterstützer an. Ein herausragendes Merkmal der MD Robot Kits ist ihre Open-Source-Natur, die es den Nutzern ermöglicht, die Roboter in weniger als einer Stunde zusammenzubauen. Dies macht sie besonders zugänglich für eine breite Zielgruppe, die von Bildungseinrichtungen bis hin zu DIY-Enthusiasten reicht. Das Projekt ist darauf ausgelegt, nicht nur technisches Wissen zu vermitteln, sondern auch die Freude an der Schaffung und Anpassung von Robotern zu fördern.
Roboter
1. Mini Pupper:
Versionen: Mini Pupper 1 (2021), Mini Pupper 2 (2022), Mini Pupper 2G & 2GA.
Design: Ein kostengünstiges, persönliches Quadruped-Kit mit Open-Source-Software.
Funktionen: Unterstützt multimodale generative KI wie ChatGPT von OpenAI, Gemini von Google und Claude von AWS. Es ist kompatibel mit ROS1 und ROS2 für SLAM & Navigation und basiert auf OpenCV für Deep Learning mit Kameras.
Erweiterbarkeit: Nutzt Raspberry Pi und Arduino, was hohe Anpassungsfähigkeit ermöglicht.
Open-Source-Plattform: Der Mini Pupper unterstützt das Robot Operating System (ROS) und bietet Funktionen wie SLAM (Simultaneous Localization and Mapping) und Navigation. Er ist mit Lidar- und Kamerasensoren ausgestattet, die es ihm ermöglichen, seine Umgebung zu kartieren und sich autonom zu bewegen.
Technische Spezifikationen: Der Roboter verfügt über 12 Freiheitsgrade, die durch fortschrittliche Servomotoren ermöglicht werden. Diese Motoren bieten Feedback zu Beschleunigung und Kraft, was eine präzise Steuerung erlaubt.
Hardware und Erweiterbarkeit: Der Mini Pupper nutzt den Raspberry Pi 4B oder das Raspberry Pi Compute Module 4 als zentrale Recheneinheit und ist mit einem ESP32 als Mikrocontroller ausgestattet. Er verfügt über ein IPS-Display mit einer Auflösung von 240 x 320 Pixeln, ein Mikrofon, Lautsprecher und einen Touch-Sensor.
Anpassungsfähigkeit: Dank seiner Open-Source-Natur kann der Mini Pupper tiefgreifend modifiziert werden. Nutzer können eigene Module hinzufügen und den Roboter für verschiedene Projekte anpassen, wie z.B. das Verfolgen von Objekten im Raum.
Bildung und Community: Der Mini Pupper ist ideal für Schulen und Homeschooling-Familien geeignet. Er wird mit umfassenden Anleitungen und Ressourcen geliefert, die den Einstieg in die Robotik erleichtern. Nutzer können Teil einer globalen Community werden, um Ideen auszutauschen und Unterstützung zu erhalten.
Preis und Verfügbarkeit: Im Rahmen der Kickstarter-Kampagne wird der Mini Pupper in verschiedenen Versionen angeboten, wobei das Basismodell etwa 479 Euro kostet. Die Auslieferung soll im Februar beginnen, wobei Unterstützer das finanzielle Risiko von Crowdfunding-Kampagnen beachten sollten.
2. Turtle Robot:
Open-Source-Projekt: Der Turtle Robot basiert auf Arduino und ist ein Open-Source-Projekt, das die Integration von generativer KI unterstützt. Dies ermöglicht den Nutzern, den Roboter individuell anzupassen und zu erweitern.
Erschwinglichkeit: Der Turtle Robot ist eine kostengünstige Lernplattform für multimodale generative KI und wird zu einem Einführungspreis von 60% Rabatt auf 99 US-Dollar angeboten. Dies macht ihn besonders attraktiv für Bildungseinrichtungen und DIY-Enthusiasten.
Benutzerfreundlichkeit: Der Roboter ist so konzipiert, dass er innerhalb einer Woche aufgebaut und in Betrieb genommen werden kann. Dies erleichtert es Anfängern, schnell mit dem Lernen und Experimentieren zu beginnen.
Unterstützung und Ressourcen: MangDang bietet umfassende Unterstützung über verschiedene Kanäle sowie Zugang zu allen Code- und Design-Dateien über ein GitHub-Repository. Nutzer können die STL-Design-Dateien ausdrucken und ihre eigenen Ideen einbringen.
Multimodale Generative KI: Der Turtle Robot nutzt fortschrittliche KI-Technologien, die kontinuierliche Sprachinteraktionen ermöglichen. Die KI kann sich an frühere Gespräche erinnern und darauf basierend personalisierte Antworten geben.
Anwendungsbeispiele: Es gibt zwei Arduino-Projekte, die mit dem Turtle Robot genutzt werden können: eines zum Testen einzelner Funktionen und ein weiteres, das alle Funktionen über Sprachsteuerung ausführt.
Verfügbarkeit: Der Turtle Robot war im Rahmen der Kickstarter-Kampagne bis Oktober 2024 erhältlich und wird danach in einem Online-Shop verfügbar sein.
In Zeiten globalen Wettbewerbs, steigenden Kostendrucks und Fachkräftemangels bieten die Automatisierungslösungen von fruitcore robotics einen entscheidenden Vorteil: Sie optimieren Produktionsprozesse schnell und effizient bei minimalem Projektaufwand. Die Solution Kits sind auf unterschiedliche Produktionsszenarien abgestimmt und integrieren sich nahtlos in bestehende Prozesse, wodurch Unternehmen signifikante Zeit- und Kosteneinsparungen erzielen.
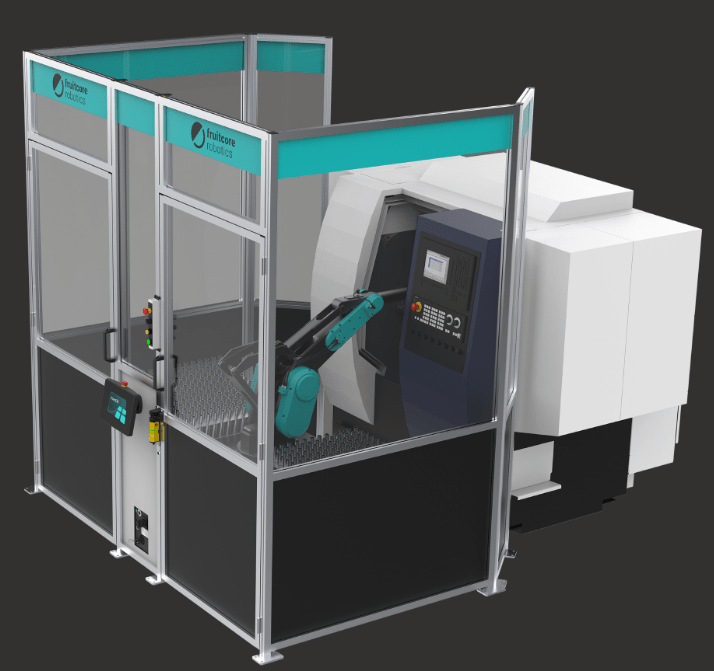
Solution Kits in Aktion: Effiziente Lösungen für jede Anforderung Auf der Motek 2024 stellt fruitcore robotics das Solution Kit Part Separation sowie das neueste modulare Solution Kit Machine Tending II vor. Letzteres besteht aus standardisierten Component Kits und kann individuell für spezifische Anwendungen konfiguriert werden. Dies ermöglicht eine schnelle und flexible Anpassung sowohl an die Produktionsanforderungen als auch an verschiedene Maschinen wie CNC-Maschinen, Pressen, Laser- und Spritzgießanlagen. Mit flexibel gestaltbarer Teilebereitstellung und dem Einsatz eines Doppelgreifers bietet das Solution Kit Machine Tending II maximale Autonomiezeiten und kurze Maschineneingriffszeiten.
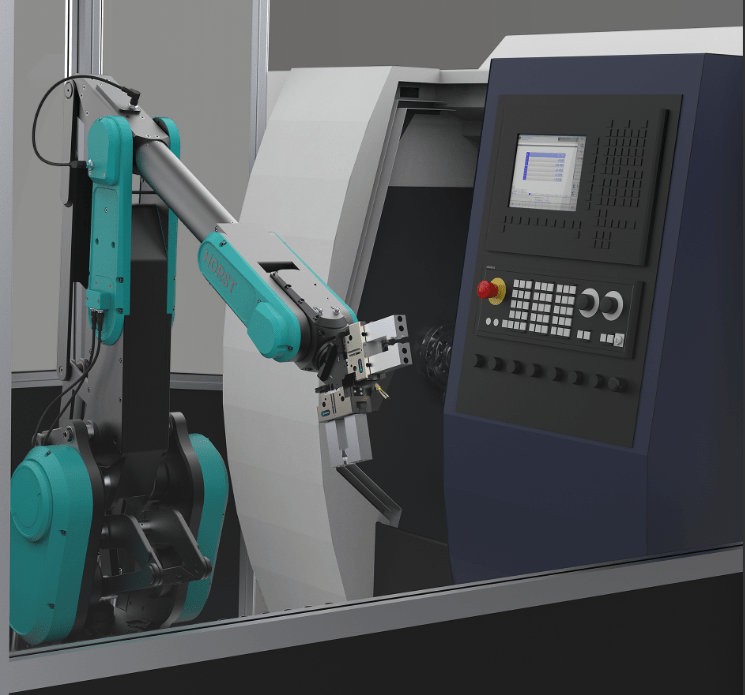
HORST1500: Ein Industrieroboter der neuesten Generation HORST1500 wird auf der Messe als zentraler Bestandteil des Solution Kits Machine Tending II präsentiert. Dieser Industrieroboter der neuesten Generation, entwickelt für Maschinenbeschickung und Palettierprozesse, überzeugt durch seine schnelle Taktzeit. Mit einer Reichweite von 1485 Millimetern und einer Traglast von bis zu 15 Kilogramm ist er vielseitig einsetzbar. Seine kompakte Bauweise und Beweglichkeit ermöglichen maximale Flexibilität auf engem Raum, während seine Fähigkeit, sich nah an Maschinen zu positionieren, ein tiefes Eingreifen in den Arbeitsbereich erlaubt.
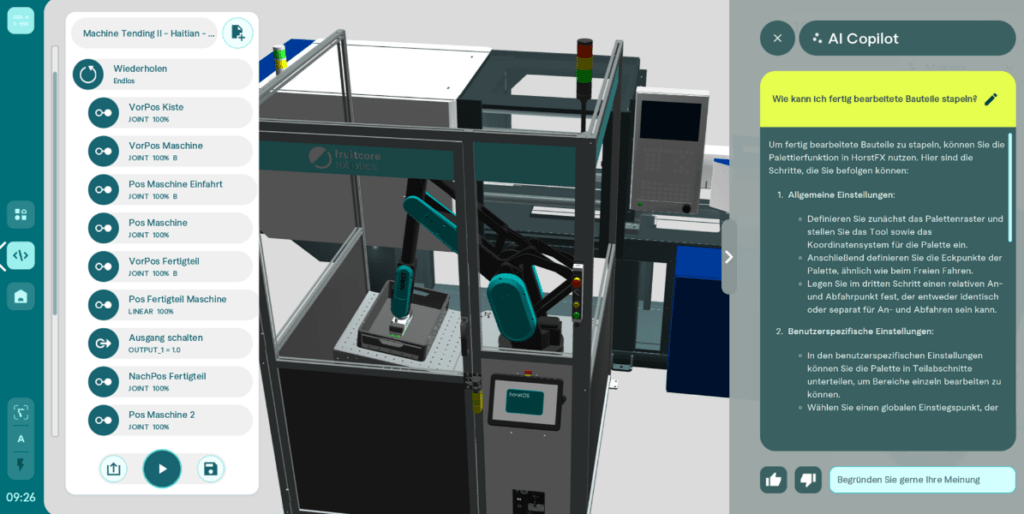
horstOS ist die zentrale Steuerungssoftware für die Automatisierung mit HORST. Sie unterstützt effizient bei der Einrichtung, Programmierung und Steuerung von Prozessen und ermöglicht durch 3D-Visualisierungen und vordefinierte Programme eine einfache Realisierung vollständiger Anwendungen. Der integrierte AI Copilot hilft in natürlicher Sprache und macht die Umsetzung von Automatisierungsprojekten noch schneller und effizienter.
Live erleben: Innovationen und Highlights auf der Motek 2024 fruitcore robotics bietet auf der Motek 2024 einen umfassenden Einblick in die neuesten Entwicklungen und Technologien seiner Digital Robot Platform, ergänzt durch spannende Live-Demonstrationen und praxisnahe Anwendungen. Ein besonderes Highlight bleibt bis zur Messe geheim und wird dort exklusiv enthüllt.
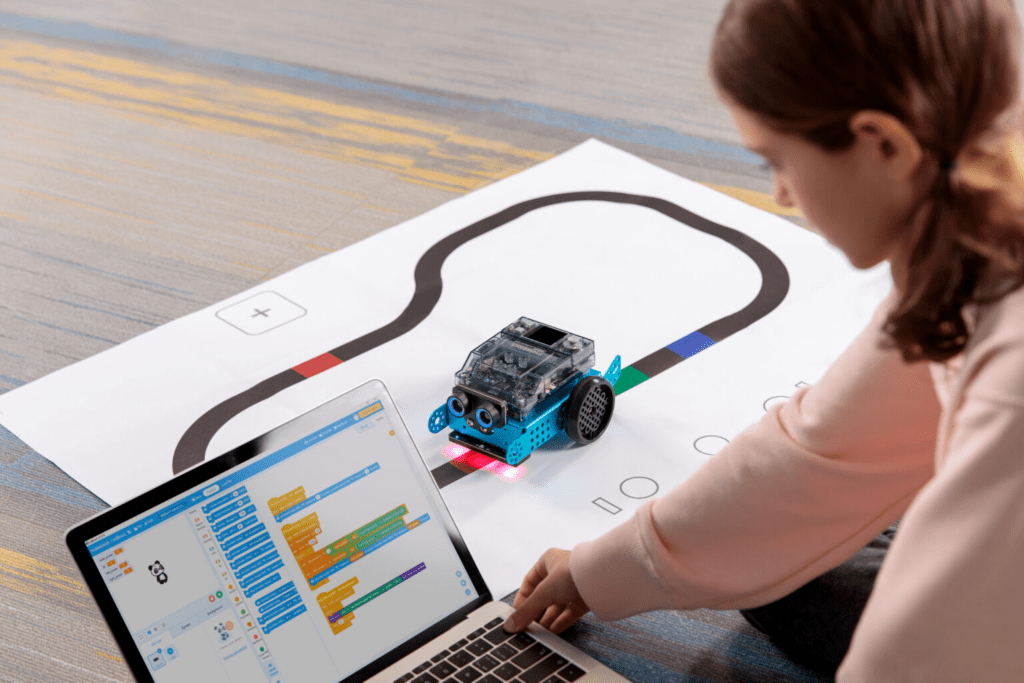
The mBot2 programming robot replaces the globally successful mBot1 after 8 years and inspires with state-of-the-art sensor technology, new motors and a brand new AI control board in a familiar design. For children, teachers and tinkerers who want to learn more about computer science, STEM, IoT, AI and block-based coding through play
Ubstadt-Weiher, 29.04.2021 – Over the past eight years, the educational robot mBot from MAKEBLOCK has not only taught millions of children, students, teachers and aspiring programmers complex STEM (science, technology, engineering, mathematics) relationships in a playful way, but also put a smile on their faces after completing successful missions. And the success story continues with the new mBot2: Under the carefully modified shell, which is now made of robust aluminum, concentrated state-of-the-art technology is packed that enables countless new programming and application possibilities. The most striking thing at first glance are the next-generation ultrasonic sensors, which look at you in bright blue. Who can resist this seductive look? The blue „eyes“ are not only suitable for precise distance measurement, they also convey emotions with the help of the controllable ambient lighting. The mBot2 almost seeks eye contact with the little programmers, because AI image recognition can be used to control speed via facial expressions, for example.
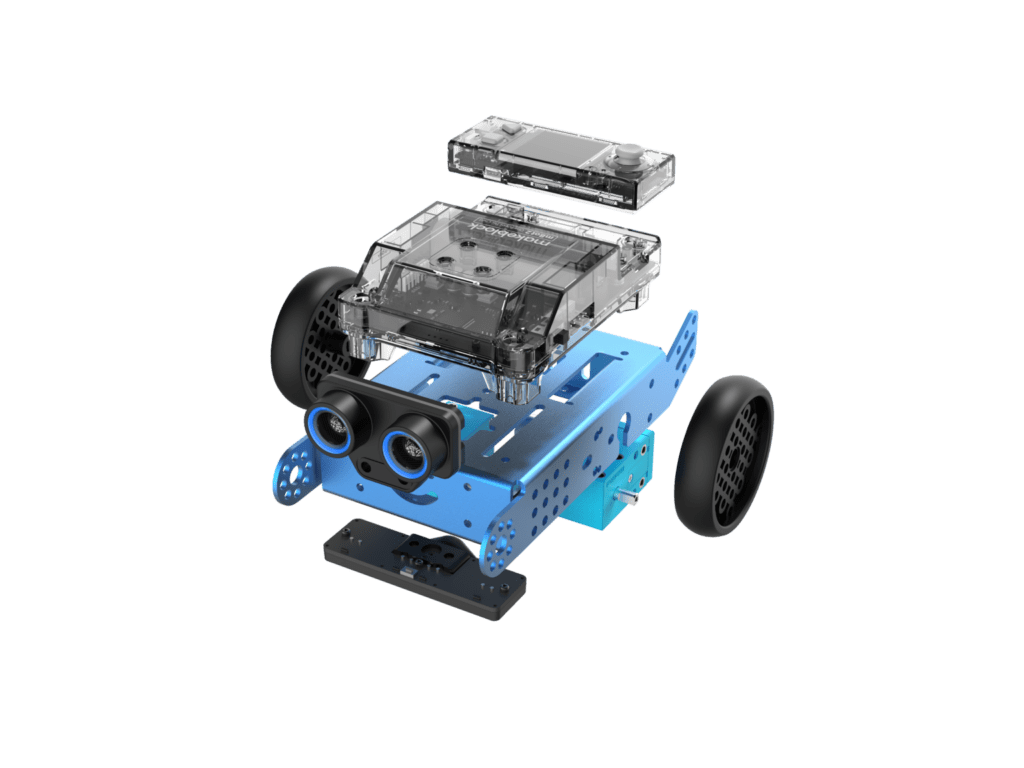
The „brain“ of the mBot2 is the powerful CyberPi microcontroller with integrated color display, speaker, microphone, light sensor, gyroscope, RGB display and more. The built-in WiFi and Bluetooth module allows you to connect to the Internet for smart functions such as speech recognition, speech synthesis, LAN broadcast and uploading data to Google Sheets. The mBot2 is currently the most exciting toy robot to build yourself (only a screwdriver required), versatile expandable and with great design freedom in programming, which also makes the inner workings of a robot tangible: Available now for an RRP of 139 EUR (incl. VAT) in the Solectric online shop.
mBot2 communicates with its environment – powered by CyberPi
One of the most important innovations of the mBot2 compared to the previous version is its network capability with the help of the CyberPi microcomputer. The programmable powerhouse, in combination with the mBlock coding editor, is a practical learning aid for computer science and AI education and sets hardly any limits to children’s play instinct. Teachers have the option of using Google Classroom, for example, to conduct interactive and advanced lessons in which several mBot2 communicate with each other via the Internet. In this way, the data from various devices can be collected, visualized and processed and initial programming for AI and IoT (Internet of Things) applications can be learned.
„The small educational robot mBot2 makes programming child’s play and encourages children to play creatively and interactively,“ explains Alexander Hantke, Head of Solectric Education. „For children who are interested in electronics, robotics and programming, the mBot2 is the ideal gift. Especially when children realize how other family members are also enthusiastic about the topic, they are often carried away by it. But it’s also important to let children make their own mistakes with the mBot2 in order to keep the fun factor high over a long period of time.“
The CyberPi controller with a 1.44″ full-color display for displaying data, images and other information can be used not only as the robot’s data center, but also as a handheld device such as a game controller or monitoring device. The built-in memory and operating system make it possible to store and manage up to eight programs in the controller.
It gets really exciting when connecting multiple mBots2 creates a local network of robots that communicate with each other, share information, and perform tasks. If the mBot2 are connected to the Internet, they can perform advanced functions such as voice recognition, connect to a cloud or retrieve weather information. Maximum precision in controlling the rotation, speed and position of the wheels and the robot is promised by the 3-axis gyroscope installed in the CyberPi and the accelerometer for the optical encoder motors, which have a torque of 1.5 kg-cm, a maximum speed of 200 rpm and a detection accuracy of 1°.
mBlock – the powerful coding platform for easy entry into computer science and STEM lessons
The programmable robot helps kids learn how to code step-by-step through interactive drag-and-drop software. With the extensive tutorials and the included project cases, the young explorers can start with graphical programming and use the programming languages Scratch or Arduino C with one click. The mBlock software is compatible with Windows, macOS, Linux and Chromebook and also supports Android and iOS. Together with mBlock, the mBot2 becomes a powerful tool to get in touch with advanced technologies such as AI, IoT, and data science. Students start with block-based coding and move on to Python coding as they gain experience. The Python Editor supports the young programmers with smart functions such as intelligent autocomplete and syntax highlighting.
Extensible with mBuild modules and Makeblock components
The mBot2 can extend the radius of action with more than 60 different mBuild modules and connect up to 10 different sensors, motors, LEDs or other components in series at the same time. A micro-controller unit (MCU) is built into each module, which allows the modules to be connected without prior disconnection or a specific order. Meanwhile, add-on packages are also available for this programmable robot for children (not included) to teach programming, robotics, electronics and construction, while students can program and execute interactive missions through hands-on learning.
The mBot2 is equipped with a 2,500 mAh battery in the so-called mBot2 Shield, which can be conveniently charged via a USB C cable. The mBot2 Shield also has two connectors for encoder motors, two connectors for DC motors, and four connectors for servos. Some of the servo connectors can be connected to LED strips and analog/digital Arduino sensors.
Die Ankündigung markiert ein Jahr gemeinsamer Bemühungen, künstliche Intelligenz (KI) zu nutzen, um die Realisierung von industriellen Automatisierungs- und Robotikprojekten – vom Design bis zum Betrieb – zu vereinfachen.
Die Vention Plattform ist KI-fähig und basiert auf einem proprietären Datensatz mit mehreren hunderttausend Roboterzellendesigns, die seit der Gründung des Unternehmens 2016 erstellt wurden. Vention beabsichtigt, dieses einzigartige Potenzial zu nutzen, um das Benutzererlebnis in der Cloud und beim Edge Computing zu vereinfachen. Die Zusammenarbeit mit NVIDIA konzentriert sich darauf, mithilfe von KI digitale Zwillinge deutlich schneller und effizienter zu erstellen, damit Unternehmen ihre Projekte testen können, bevor sie investieren. Zu den Entwicklungsbereichen gehören generative Designs für Roboterzellen, Co-Pilot-Programmierung, physikbasierte Simulation und autonome Roboter.
In Kombination mit Ventions modularer Hardware und Plug-and-Play Bewegungssteuerungstechnologie wird die Zusammenarbeit mit NVIDIA modernste KI in den Vordergrund der Fertigung rücken und darauf abzielen, KMU den Zugang zu industrieller Automatisierungstechnologie zu erleichtern. Vention ist bereits für seine benutzerfreundlichen Softwareprodukte und -schnittstellen bekannt und möchte KMU auch weiterhin Lösungen anbieten, die es ermöglichen, die Automatisierung schneller und effizienter umzusetzen.
Eine Reihe neuer Vention-Produkte, die aus dieser Zusammenarbeit hervorgehen, wird voraussichtlich im dritten Quartal 2024 angekündigt.
„Das Vention Ökosystem wird zusammen mit NVIDIAs Robotertechnologie und KI-Expertise dazu beitragen, Innovationen in der Fertigungsindustrie entscheidend voranzubringen. Jetzt können selbst die komplexesten Anwendungsfälle für kleine und mittlere Hersteller umgesetzt werden.“ – Etienne Lacroix, Gründer und CEO von Vention.
„Ventions cloudbasierte Roboterplattform, die von NVIDIA KI angetrieben wird, wird es Herstellern von Industrieanlagen überall ermöglichen, Roboterzellen nahtlos zu entwerfen, einzusetzen und zu betreiben und so die Branche voranzubringen.“ – Deepu Talla, Vizepräsident für Robotik und Edge Computing bei NVIDIA.
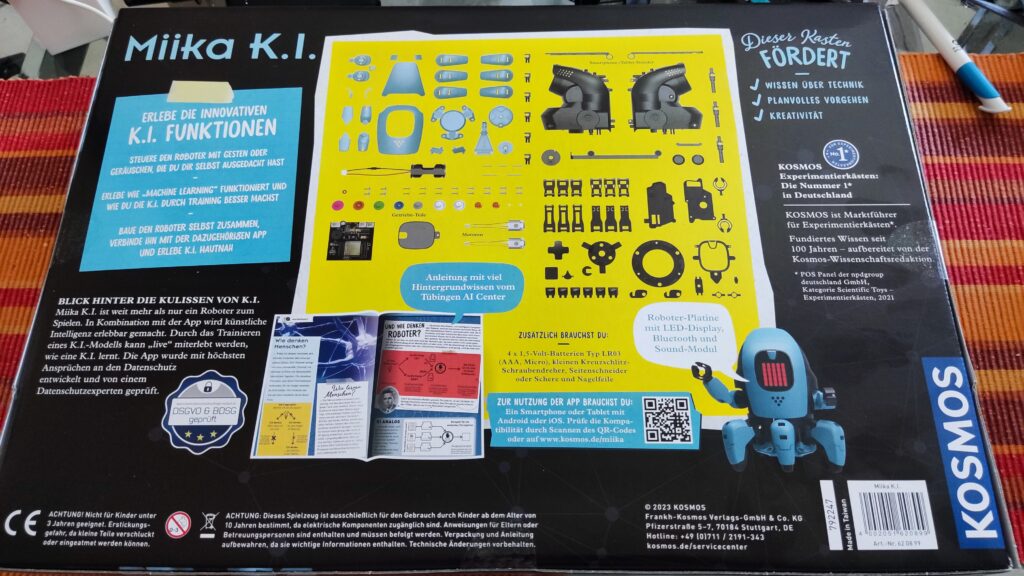
Miika K.I. ist ein innovativer Roboter und Experimentierkasten von Kosmos, der Kindern ab 10 Jahren einen spielerischen Zugang zu den Themen Robotik und künstliche Intelligenz ermöglicht. Dieser Roboter ist mit echter künstlicher Intelligenz ausgestattet, die von den Kindern selbst trainiert und gesteuert wird. So wird das Training einer künstlichen Intelligenz verständlich erklärt und nachvollzogen.
Miika K.I. kann durch Gesten oder Audiobefehle trainiert und gesteuert werden, ganz einfach mit einer App. Zur Nutzung der App, wird lediglich ein Smartphone oder Tablet benötigt. Um Miika K.I. für Kinder zwischen 10 und 14 Jahren zu einem sicheren Spielzeug zu machen, funktioniert die App rein lokal ohne Internet, sie speichert weder Bild- noch Audiodateien und leitet auch keine Daten an einen Server.
Beispielsweise kann Miika beigebracht werden, auf ein Schnipsen oder das Zeigen eines „Daumen hoch“ mit einer Drehung zu reagieren. Die Kreativität der Kinder sind beim Umgang mit Miikas künstlicher Intelligenz keine Grenzen gesetzt. Es lassen sich zwei Arten von KI trainieren; eine Version, die auf das Kamerabild des Smartphones oder Tablets reagiert oder eine Version, die auf wahrgenommene Geräusche reagiert.
Der Roboter verfügt über ein LED-Display, auf dem Texte, Symbole und Gesichter dargestellt werden können. Miika kann sich bewegen, blinken und Töne von sich geben. Die Steuerung erfolgt über eine App, die offline arbeitet, um den Datenschutz zu gewährleisten. Miika K.I. bietet den Kindern die Möglichkeit, die Technik der Zukunft spielerisch zu erleben und technologisches Verständnis zu vermitteln. Der Experimentierkasten wurde mit dem Toy Award 2023 ausgezeichnet.
Zum Lieferumfang gehören Bauteile zum Zusammenbau des Roboters, eine Bluetooth-fähige Platine mit LED-Display, zwei Motoren und eine Anleitung. Für den Betrieb werden vier 1,5-Volt-Batterien vom Typ LR03 (AAA, Micro) benötigt. Der Roboter hat die Abmessungen 425 x 265 x 79 mm und wiegt 766 Gramm. Miika K.I. ist ein spannendes und lehrreiches Spielzeug, das Kindern die Möglichkeit bietet, die Möglichkeiten und Grenzen der künstlichen Intelligenz kennenzulernen und zu verstehen.