• Stilvolles Design: Der Oberkörper wurde stilvoller gestaltet, mit versteckten Schrauben und Motoren und ohne lose Kabel.
• Einfachere Montage: Die neue Version bietet eine einfachere Montage.
• Verstärkte Motoren: Die Schultern sind jetzt mit stärkeren Motoren ausgestattet.
• Verbesserte Imitationsfunktion: Zuvor konnte pib nur horizontalen Bewegungen folgen. Die aktualisierte Version kann nun auch vertikale Bewegungen verfolgen.
• Aufgerüstete Elektronik: Die Elektronik wurde auf einen Raspberry Pi 5 aufgerüstet.
• Dockerisierung: pib ist jetzt dockerisiert, was die Installation auf verschiedenen Softwaresystemen ermöglicht. Dies war ein Community-Erfolg, insbesondere während im Rahmen des letzten Hackathons.
• Digitaler Zwilling: Ein digitaler Zwilling wurde entwickelt, der Simulationen und maschinelles Lernen ermöglicht.
Kontinuität und Kompatibilität
Nicht alles hat sich geändert. Die Kamera und das Display bleiben gleich, und es wurde darauf geachtet, die Kompatibilität mit der vorherigen Version zu erhalten. Aktualisierte Tutorials werden vorbereitet, um eine einfache Montage sicherzustellen.
Das Meetup hatte auch einen Gastredner von EduArt Robotik, der EduArt, den Roboter, vorstellte. Nach den Präsentationen und Diskussionen ließen die Teilnehmer den Abend gemeinsam bei Pizza und Getränken ausklingen und nutzten die Chance, sich mit anderen Robotik-Enthusiasten auszutauschen.
Seattle, WA – Crafted for portability, KT2 promotes physical activity through intuitive prompts and interactive games, making it a perfect companion for home and professional settings.
Designed by Seattle based tech company, Wair Living, the In-house robot innovation team KameRobotics have developed a mini-robot that enhances productivity at home, acts as a thoughtful companion, and is a diligent STEM teacher.
„Our KT2 robot prioritizes user privacy and minimalist with its design, featuring no integrated cameras or screen.“ said Qian Li, Founder of Wair and KameRobotics. „We want to ensure a secure interaction environment and more intuitive play via robot action and lighting interaction“.
KT2 Kungfu Turtle is not just a toy but a multifunctional companion for gaming, productivity, and learning. It features acrobatics, physical sparring, and autonomous return functions, supported by a powerful operating system and programmable chipset.
Beyond entertainment, KT2 enhances productivity in home and office environments. It includes a Pomodoro timer for focused work intervals and movement prompts to combat sedentary lifestyles. The modular design allows customization with accessories, transforming KT2 into a unique desk ornament and interactive companion.
At the last Robotics Meetup Nuremberg, significant updates about the humanoid robot pib were announced: a new version is set to be released in August.
Changes from Last Year’s Version:
• Stylish Design: The upper body has been redesigned to be more stylish, with hidden screws and motors, and no loose cables.
• Easier Assembly: The new version offers simpler assembly.
• Enhanced Motors: The shoulders are now equipped with stronger motors.
• Improved Imitation Feature: Previously, pib could only follow horizontal movements. The updated version can also follow vertical movements.
• Upgraded Electronics: The electronics have been upgraded to a Raspberry Pi 5.
• Dockerization: pib is now dockerized, allowing installation on various software systems. This was a community effort, especially during the last hackathon.
• Digital Twin: A digital twin has been developed, enabling simulations and machine learning.
Continuity and Compatibility
Not everything has changed. The camera and display remain the same, and efforts have been made to maintain compatibility with the previous version. Updated tutorials are being prepared to ensure easy assembly.
The meetup also featured a guest speaker from EduArt Robotik, who introduced EduArt, the robot. After the presentations and discussions, everyone enjoyed pizza and drinks while networking with fellow robotics enthusiasts.
Die Ankündigung markiert ein Jahr gemeinsamer Bemühungen, künstliche Intelligenz (KI) zu nutzen, um die Realisierung von industriellen Automatisierungs- und Robotikprojekten – vom Design bis zum Betrieb – zu vereinfachen.
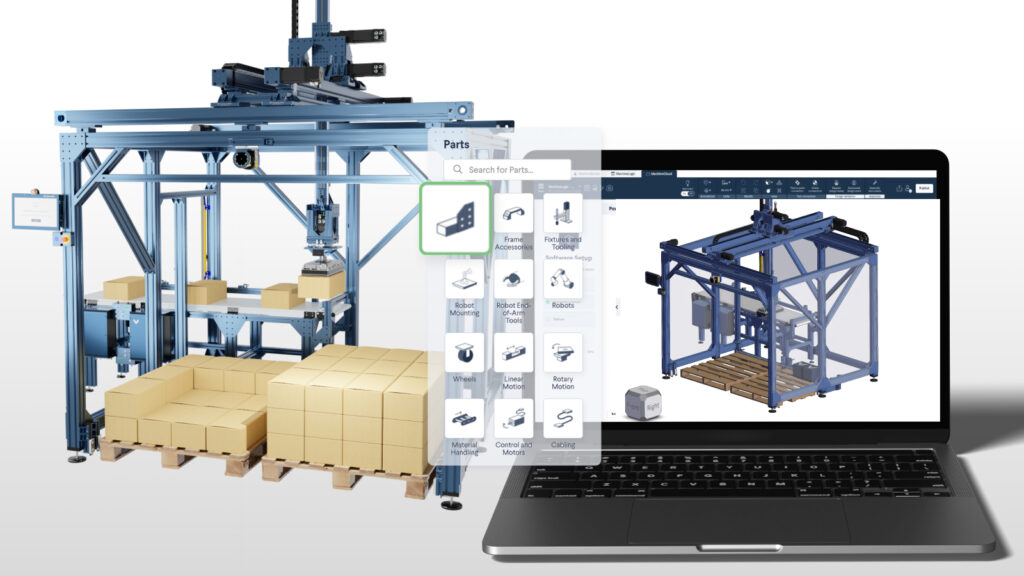
Die Vention Plattform ist KI-fähig und basiert auf einem proprietären Datensatz mit mehreren hunderttausend Roboterzellendesigns, die seit der Gründung des Unternehmens 2016 erstellt wurden. Vention beabsichtigt, dieses einzigartige Potenzial zu nutzen, um das Benutzererlebnis in der Cloud und beim Edge Computing zu vereinfachen. Die Zusammenarbeit mit NVIDIA konzentriert sich darauf, mithilfe von KI digitale Zwillinge deutlich schneller und effizienter zu erstellen, damit Unternehmen ihre Projekte testen können, bevor sie investieren. Zu den Entwicklungsbereichen gehören generative Designs für Roboterzellen, Co-Pilot-Programmierung, physikbasierte Simulation und autonome Roboter.
In Kombination mit Ventions modularer Hardware und Plug-and-Play Bewegungssteuerungstechnologie wird die Zusammenarbeit mit NVIDIA modernste KI in den Vordergrund der Fertigung rücken und darauf abzielen, KMU den Zugang zu industrieller Automatisierungstechnologie zu erleichtern. Vention ist bereits für seine benutzerfreundlichen Softwareprodukte und -schnittstellen bekannt und möchte KMU auch weiterhin Lösungen anbieten, die es ermöglichen, die Automatisierung schneller und effizienter umzusetzen.
Eine Reihe neuer Vention-Produkte, die aus dieser Zusammenarbeit hervorgehen, wird voraussichtlich im dritten Quartal 2024 angekündigt.
„Das Vention Ökosystem wird zusammen mit NVIDIAs Robotertechnologie und KI-Expertise dazu beitragen, Innovationen in der Fertigungsindustrie entscheidend voranzubringen. Jetzt können selbst die komplexesten Anwendungsfälle für kleine und mittlere Hersteller umgesetzt werden.“ – Etienne Lacroix, Gründer und CEO von Vention.
„Ventions cloudbasierte Roboterplattform, die von NVIDIA KI angetrieben wird, wird es Herstellern von Industrieanlagen überall ermöglichen, Roboterzellen nahtlos zu entwerfen, einzusetzen und zu betreiben und so die Branche voranzubringen.“ – Deepu Talla, Vizepräsident für Robotik und Edge Computing bei NVIDIA.
Karlsruhe, 18.06.2024 – Bei einem vom Bundesministerium für Bildung und Forschung (BMBF) ausgerichteten Vernetzungstreffen des Transferzentrums Roboter im Alltag (RimA) am 17. Juni 2024 in Berlin wurde ein Onlineforum mit dazugehöriger Wissensplattform präsentiert, um eine gezielte Auseinandersetzung mit Robotern im Alltag zu ermöglichen und die Bildung einer Community zu fördern. Das vom BMBF mit rund 2,25 Millionen Euro über einen Zeitraum von zirka drei Jahren geförderte Projekt widmet sich der Interaktion zwischen Menschen und Robotern.
Roboter halten Einzug in unseren Alltag, in Form von Staubsaugern in der Wohnung, als Bedienung im Restaurant oder Reinigungsroboter im Bahnhof. Dabei ist den meisten Menschen nicht klar, ob sie – sowohl technisch als auch mental – darauf vorbereitet sind. Denn wie interagiert man eigentlich mit einem fremden Roboter?
Bild: FZI Forschungszentrum Informatik
Community-Building als Weg zu mehr Akzeptanz für Robotik im Alltag
Das RimA-Konsortium, bestehend aus den Projektpartnern FZI Forschungszentrum Informatik, Rheinische Friedrich-Wilhelms-Universität Bonn, Freie Universität Berlin und TÜV SÜD GmbH hat zum Ziel, eine Community aufzubauen, die den Austausch genau zu diesem Thema ermöglicht. So sollen gleichermaßen Forschung und Entwicklung gefördert, aber auch der Stand der Technik transparent gemacht werden. „Am Ende sollen in der RimA-Community Forschende, Industrieakteure und Endanwender gleichermaßen eine Anlaufstelle für ihre Anliegen finden”, stellt FZI-Abteilungsleiter und RimA-Koordinator Tristan Schnell das Projekt vor. Über zahlreiche Maßnahmen wie Workshops und Schulungen, Benchmarking-Events und -Labore, Robotik-Wettbewerbe, ein Online-Forum und eine Wissensplattform sollen Grundlagen geschaffen werden, um Alltagsrobotik zugänglicher zu machen. Schnell: „Die Wissensplattform bietet uns die Möglichkeit, Informationen zum aktuellen Stand der Dinge zielgruppengerecht aufzubereiten und öffentlich zur Verfügung zu stellen.” Dabei geht es neben Informationen zur Mensch-Roboter-Interaktion und existierenden Robotikprodukten auch um Aspekte wie zum Beispiel Möglichkeiten des Einsatzes von Open Source Software, regulatorische Rahmenbedingungen für die Sicherheit, Tools für die Entwicklung eines Geschäftsmodells und die Evaluation von Vergleichskriterien.
Transfer von Forschungsergebnissen zu intuitiven Interaktionsformen
Mit dem Forum erhalten somit alle Interessierten die Möglichkeit, sich zu Themen rund um Robotik in unterschiedlichen Anwendungsbereichen anonym und ergebnisoffen auszutauschen. Aber auch die Kommunikation zwischen Start-ups, den vom BMBF geförderten RA3-Kompetenzzentren und anderen unabhängigen Projekten stehen im Mittelpunkt des Interesses. Ziel des Transferzentrums ist, ein nachhaltiger Anlaufpunkt für die Einordnung des Standes und der Weiterentwicklung von Robotik-Komponenten, -Anwendungen und -Services sowie den Austausch darüber zu sein.
Über die RA3-Fördermaßnahme
Grundlage für die Fördermaßnahme ist das BMBF-Forschungsprogramm zur Mensch-Technik-Interaktion (MTI) „Technik zum Menschen bringen“ im Themenfeld „Digitale Gesellschaft“. Im Rahmen des Vorhabens gilt es, innovative Forschungs- und Entwicklungsvorhaben der Mensch-Technik-Interaktion zu fördern, Assistenzroboter in praxisnahen Anwendungsszenarien umfassend zu erproben und damit einen Beitrag zum künftigen Transfer von Assistenzrobotik in konkrete Einsatzfelder zu leisten.
Zukunftsfähige Lösungen müssen sowohl das individuelle Interaktionsverhalten als auch das Umfeld und technologische Möglichkeiten beachten und sich an gesellschaftlichen Anforderungen an eine „interaktive Assistenzrobotik“ messen lassen. Dadurch sollen flexible und leistungsfähige Lösungen für eine optimale Interaktion von Menschen mit Robotern entwickelt werden. So wird das gesamte Spektrum von Mensch-Roboter-Interaktionen (MRI) für jede Alltagssituation adressiert.
Der Förderschwerpunkt „Roboter für Assistenzfunktionen“ ist vom BMBF als dreiteilige Bekanntmachungsreihe angelegt. In der bereits abgeschlossenen Stufe 1 drehten sich die Projekte um interaktive Grundfertigkeiten. Bei der zweiten Bekanntmachung der Reihe (RA2) ging es um „Interaktionsstrategien“. Aus der dritten BMBF-Bekanntmachung „Roboter für Assistenzfunktionen: Interaktion in der Praxis“ (RA3) werden nun die Zentren für Assistenzrobotik in definierten Anwendungsdomänen zur praxisnahen Erprobung gefördert – die sogenannten RA3-Kompetenzzentren rokit, RuhrBots und ZEN-MRI – sowie das Transferzentrum RimA.
Montreal/Berlin, 5 June 2024. The technology company Vention has analyzed in a study how companies automate their production independently. Small businesses are trendsetters in do-it-yourself (DIY) automation, but large companies are catching up. The study is based on anonymized data from over 1,400 corporate users of Vention’s Manufacturing Automation Platform (MAP) worldwide.
For the second time, Vention publishes the annual study „The State of DIY Industrial Automation“. The focus is on do-it-yourself (DIY) automation, which enables manufacturers of different sizes to automate their production independently using state-of-the-art technologies.
For the study, Vention evaluated the user behavior of its corporate customers on the Vention cloud platform MAP from January to December 2023. The aim was to capture the current state of DIY automation in companies and to explain how they use the DIY approach for the design, integration and operation of automation components, such as robot cells or cobot palletizers.
„The trend towards DIY automation continues this year,“ says Etienne Lacroix, CEO of Vention. „One driver is the shortage of skilled workers, which is becoming increasingly noticeable . The question of how production can be automated quickly and cost-effectively is currently occupying many companies. We see that small companies in particular are automating independently. But compared to last year, the number of large companies using DIY automation is increasing significantly.“
The most important findings of the study:
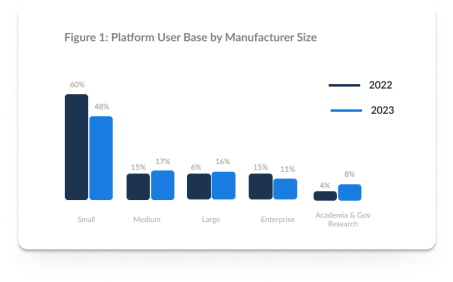
1. Small (< 200 employees (MA)) and medium-sized enterprises („Medium“, < 2,000 employees) were the leading users of automation systems on MAP in 2023, with a share of 48% and 17%, respectively. However, small businesses faced more challenging economic conditions in 2023. As a result, there was a decline of 12% in this segment compared to the previous year (see study, p. 8).
Large companies („Large“, < 10,000 employees) as well as the academic and government research sector („Academia & Gov Research“) have made significant gains in the use of the DIY approach on MAP (+10% and +4% respectively). Platform technology has made significant progress over the past year, providing more opportunities for high-throughput projects traditionally associated with larger manufacturers or users (see study, p. 8).
3. In 2023, very large companies („Enterprise“, > 10,000 employees) used the DIY approach more often in their factory floors than any other sector. Accordingly, the number of projects implemented with MAP in this segment has risen – from an average of 4.1 in 2022 to 4.9 projects in 2023 (see study, p. 11).
4. Projects with machine operation applications were the fastest implemented on MAP in 2023. This is likely due to the fact that it is difficult for companies to recruit staff given the ongoing labor shortages. As recent innovations have made CNC integration more accessible, manufacturers are more eager than ever to quickly adopt automated machine operation applications (see study, p. 24).
5. After two years of record sales (2021 and 2022), the Association for Advancing Automation (A3) reported a significant 30% decline in robot sales in North America in 2023. In contrast, robot deployments on MAP saw a notable increase in both 2022 and 2023. In 2023, robot deployments on MAP grew by about 40% (see study, p. 26).
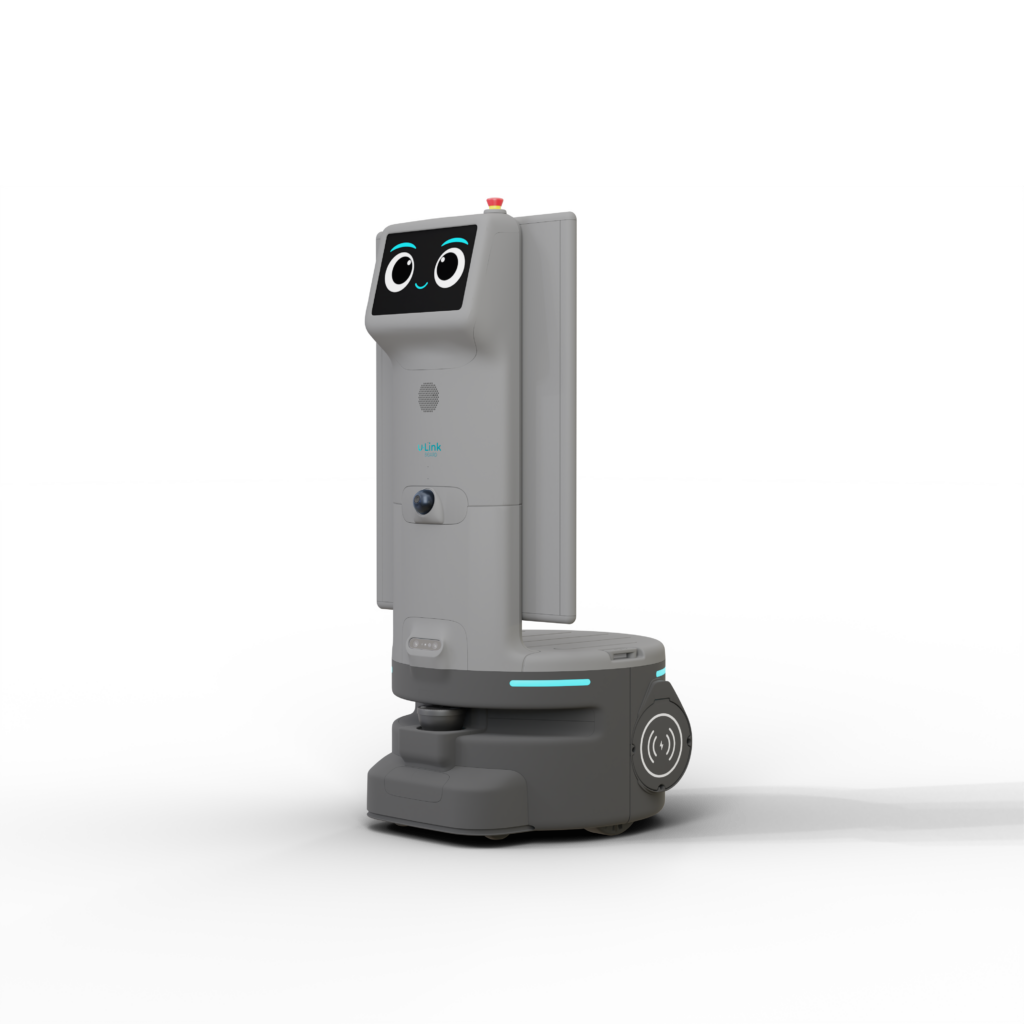
At VivaTech 2024, the United Robitics Group (URG) will be showing the new product in action – together with other robots from the URG fleet, which are fully adapted to the needs of retailers.
uLink is a highly flexible, versatile platform for rapid adaptation and support in logistics and automation.
uLink is the first URG solution with an open API for seamless integration with operating systems and greater operational flexibility.
Paris/Bochum, May 22, 2024 – At VivaTech in Paris, the United Robotics Group will be presenting its new service robots from the uLink series for the first time, which are characterized by easy integration, flexible customization and individual extensions. They are suitable for use in retail, warehouse logistics and manufacturing. As the European market leader for service robotics solutions, URG is expanding its CobiotX portfolio worldwide with the latest Cobiot for integrated workflows in the aforementioned segments. The modular platform fits seamlessly into the respective workflows and can be expanded with industry-standard accessories. uLink is designed to simplify operations and increase safety and efficiency in various environments. The unique combination of features sets new standards in the industry – from modular design and open API to 3D LiDAR-based navigation and real-time operational data visualization.
uLink is equipped with IDE, SDK and fleet management tools and allows the seamless integration and control of various components such as LiDARS, engines or sensors. Thanks to powerful software functions for configuring and managing robot applications, as well as sensors and accessories, the robot can easily handle various logistics challenges in trade and warehousing, which vary depending on the industry, company size and automation requirements. The uLink accessory interface is also modular, so that the usable area can carry a payload of up to 60 kg. The SEER navigation control allows deliveries in a predefined area of up to 400,000 m².
With the help of the plug-and-play mechanism, other accessories such as a locker for Click & Collect or confidential deliveries, a pegboard for the delivery of tools and spare parts, and trays for transporting stock can be integrated into the platform. In addition, partner integrators can develop new accessories to meet specific requirements.
„The retail and logistics sector has been undergoing a profound transformation for years, related to the growth of e-commerce, automation and the shortage of skilled workers in the value chain. Whether it’s shelf replenishers or water-spiders, i.e. those responsible for inventory in warehouses or production: it is important to support the players and offer solutions that meet their specific needs,“ explains Thomas Linkenheil, Co-CEO of the United Robotics Group. „In a highly competitive sector, consumers want a fast and personalized service. Our new logistics solution enables service providers to offer up-to-date customer service without long searches in the warehouse or tedious processes that can cost time and affect customer business.“
First Cobiot with an open API for connectivity and flexibility
Like all CobiotX solutions from the United Robotics Group, uLink is also equipped with a particularly user-friendly user interface. It is based on the no-code principle and enables users without robotics knowledge to quickly integrate into daily operations. In addition, uLink has an open API platform. This allows the solution to communicate with existing operations and other connected systems such as automatic doors or elevators, and also work with other robots and automated guided vehicles such as AMRs and AGVs.
With the launch of uLink, United Robotics Group is expanding its range of robotics solutions for logistics, warehouse management and industrial manufacturing. The robot is intended to be used in retail and logistics environments such as department stores, supermarkets, warehouses and fulfillment centers, but also factories and production facilities as well as airports and healthcare facilities.
The robot is equipped with 3D LiDAR and PL LiDAR systems for maximum precision in mobility. The platform can immediately register changes in the environment such as certain movements or people or machines and react accordingly. It is connected to an online dashboard that facilitates both workflow management and quick decisions between front- and back-of-house teams.
uLink has a long battery life of up to 14 hours on a single charge. In addition, the solution has an intelligent, wireless charging function that was developed with a well-known German battery manufacturer. This allows it to automatically return to the charging station between individual operations. The robot complies with the highest security and privacy standards, including the EU’s Performance Level D Machinery Directive and GDPR regulations.
uLink, along with United Robotics Group’s logistics and warehouse management fleet, including RBWatcher and MobilePalletizer, will be on display at the company’s VivaTech booth (Hall 1, Booth G18) in Paris from May 22-25.
uLink can be rented via the RaaS (Robot as a Service) model of the United Robotics Group from 699 euros / month or purchased for 19,900 euros.
Auf der VivaTech 2024 zeigt die United Robitics Group (URG) die Produktneuheit in Aktion – gemeinsam mit anderen Robotern aus der URG-Flotte, die vollständig an die Bedürfnisse des Einzelhandels angepasst sind.
uLink ist eine hochflexible, vielseitige Plattform für eine schnelle Anpassung und Unterstützung in Logistik und Automatisierung.
uLink ist die erste URG-Lösung mit offener API für eine nahtlose Integration in Betriebssysteme und eine größere betriebliche Flexibilität.
Paris/Bochum, 22. Mai 2024– Die United Robotics Group stellt auf der VivaTech in Paris erstmalig ihre neuen Serviceroboter aus der uLink-Serie vor, die sich durch einfache Integration, flexible Anpassung und individuelle Erweiterungen auszeichnen. Sie eignen sich für den Einsatz im Handel, der Lagerlogistik sowie im Fertigungsbereich. Als europäischer Marktführer für Servicerobotik-Lösungen erweitert die URG ihr CobiotX-Portfolio weltweit um den neuesten Cobiot für integrierte Arbeitsabläufe in den genannten Segmenten. Die modulare Plattform fügt sich nahtlos in die jeweiligen Workflows ein und kann mit Industriestandard-Zubehör erweitert werden. uLink wurde entwickelt, um Betriebsabläufe zu vereinfachen und die Sicherheit und Effizienz in verschiedenen Umgebungen zu erhöhen. Die einzigartige Kombination von Funktionen setzt neue Standards in der Branche – vom modularen Design und der offenen API bis hin zur 3D-LiDAR-basierten Navigation und der Echtzeit-Betriebsdatenvisualisierung.
uLink ist mit IDE-, SDK- sowie Flottenmanagement-Tools ausgestattet und erlaubt die nahtlose Integration und Steuerung verschiedener Komponenten wie LiDARS, Motoren oder Sensoren. Dank leistungsstarker Softwarefunktionen für die Konfiguration und Verwaltung von Roboteranwendungen, aber auch mittels Sensoren und entsprechendem Zubehör kann der Roboter verschiedene logistische Herausforderungen im Handel und in der Lagerhaltung problemlos bewältigen, die je nach Branche, Betriebsgröße und Automatisierungsanforderungen variieren. Die uLink-Zubehörschnittstelle ist ebenfalls modular aufgebaut, so dass die Nutzungsfläche eine Nutzlast von bis zu 60 kg tragen kann. Die SEER-Navigationssteuerung erlaubt Lieferungen in einem vordefinierten Bereich von bis zu 400.000 m².
Mit Hilfe des Plug-and-Play-Mechanismus, können weitere Zubehörkomponenten wie ein Schließfach für Click & Collect oder vertrauliche Lieferungen, ein Pegboard für die Lieferung von Werkzeugen und Ersatzteilen sowie Tabletts für den Transport von Lagerbeständen in die Plattform integriert werden. Darüber hinaus können die Partner-Integratoren neue Zubehörteile entwickeln, um spezifische Anforderungen zu erfüllen.
„Der Einzelhandels- und Logistiksektor befindet sich seit Jahren in einem tiefgreifenden Wandel, der mit dem Wachstum des E-Commerce, der Automatisierung und dem Mangel an Fachkräften in der Wertschöpfungskette zusammenhängt. Ob Regalauffüller oder Water-Spider, also Verantwortliche für den Bestand in Lagern oder der Fertigung: Wichtig ist, die Akteure zu unterstützen und Lösungen anzubieten, die den spezifischen Bedürfnissen entsprechen“, erklärt Thomas Linkenheil, Co-CEO der United Robotics Group. „In einem hart umkämpften Sektor wollen die Verbraucher einen zügigen und personalisierten Service. Unsere neue Logistiklösung versetzt Dienstleister in die Lage, einen zeitgemäßen Kundenservice ohne langes Suchen im Warenlager oder mühsame Prozesse anzubieten, die Zeit kosten und das Kundengeschäft beeinträchtigen können.“
Erster Cobiot mit offener API für Konnektivität und Flexibilität
Wie alle CobiotX-Lösungen der United Robotics Group ist auch uLink mit einer besonders benutzerfreundlichen Bedienoberfläche ausgestattet. Sie basiert auf dem No-Code-Prinzip und ermöglicht Anwendern ohne Robotik-Kenntnisse eine schnelle Integration in den täglichen Betrieb. Darüber hinaus verfügt uLink über eine offene API-Plattform. So kann die Lösung mit bestehenden Betriebsabläufen und anderen vernetzten Systemen wie automatischen Türen oder Aufzügen kommunizieren und auch mit anderen Robotern und fahrerlosen Transportfahrzeugen wie AMRs und AGVs zusammenarbeiten.
Mit der Markteinführung von uLink erweitert die United Robotics Group ihr Angebot an Robotik-Lösungen für die Bereiche Logistik, Lagerverwaltung und industrielle Fertigung. Der Roboter soll in Einzelhandels- und Logistikumgebungen wie Kaufhäusern, Supermärkten, Lagerhäusern und Fulfillment-Zentren, aber auch Fabriken und Produktionsstätten sowie Flughäfen und Gesundheitseinrichtungen zum Einsatz kommen.
Der Roboter ist mit 3D-LiDAR- und PL-LiDAR-Systemen für maximale Präzision bei der Mobilität ausgestattet. Die Plattform kann Änderungen in der Umgebung wie bestimmte Bewegungen oder Personen bzw. Maschinen sofort registrieren und entsprechend reagieren. Dabei ist er mit einem Online-Dashboard verbunden, das sowohl das Workflow-Management als auch schnelle Entscheidungen zwischen Front- und Back-of-House-Teams erleichtert.
uLink hat eine lange Akkulaufzeit von bis zu 14 Stunden mit einer Ladung. Zudem verfügt die Lösung über eine intelligente, kabellose Ladefunktion, die mit einem namhaften deutschen Batteriehersteller entwickelt wurde. Damit kann sie zwischen einzelnen Arbeitsgängen automatisch zur Ladestation zurückkehren. Der Roboter entspricht den höchsten Sicherheits- und Datenschutzstandards, einschließlich der EU-Maschinenrichtlinie „Performance Level D“ sowie den DSGVO-Vorschriften.
uLink wird zusammen mit der Logistik- und Lagerverwaltungsflotte der United Robotics Group einschließlich RBWatcher und MobilePalletizer vom 22. bis 25. Mai auf dem VivaTech-Stand des Unternehmens (Halle 1, Stand G18) in Paris zu sehen sein.
uLink kann über das RaaS-Modell (Robot as a Service) der United Robotics Group ab 699 Euro / Monat gemietet oder für 19.900 Euro erworben werden.
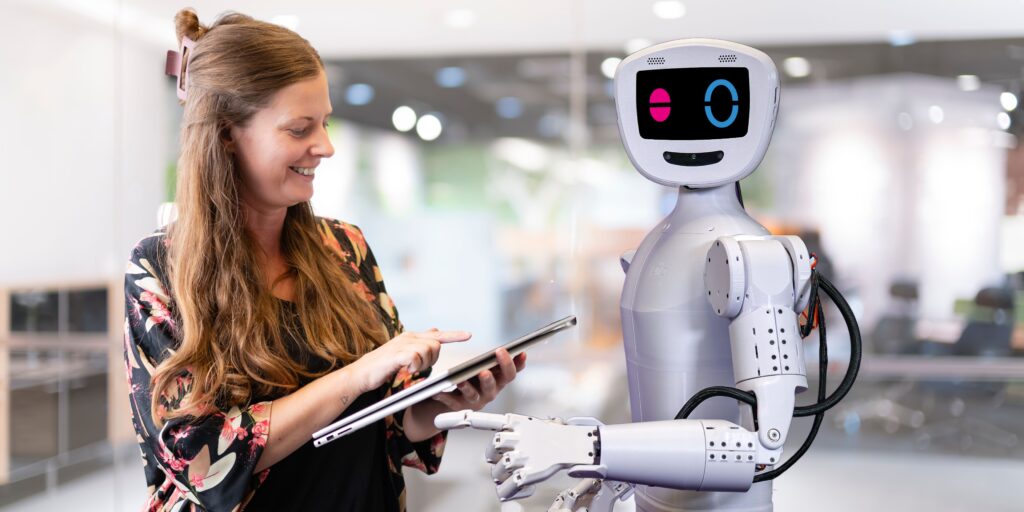
2 years ago, the open source robotics project pib was launched. The goal of pib, the printable intelligent bot anyone can build themselves, is to lower the barriers and make robotics and AI accessible to anyone who is interested. Over the past two years, pib has built an active and dedicated community that supports the project in moving forward. Therefore, a lot has happened since the project launch – time to look back on how far pib has come.
Milestones, Challenges and What Comes Next
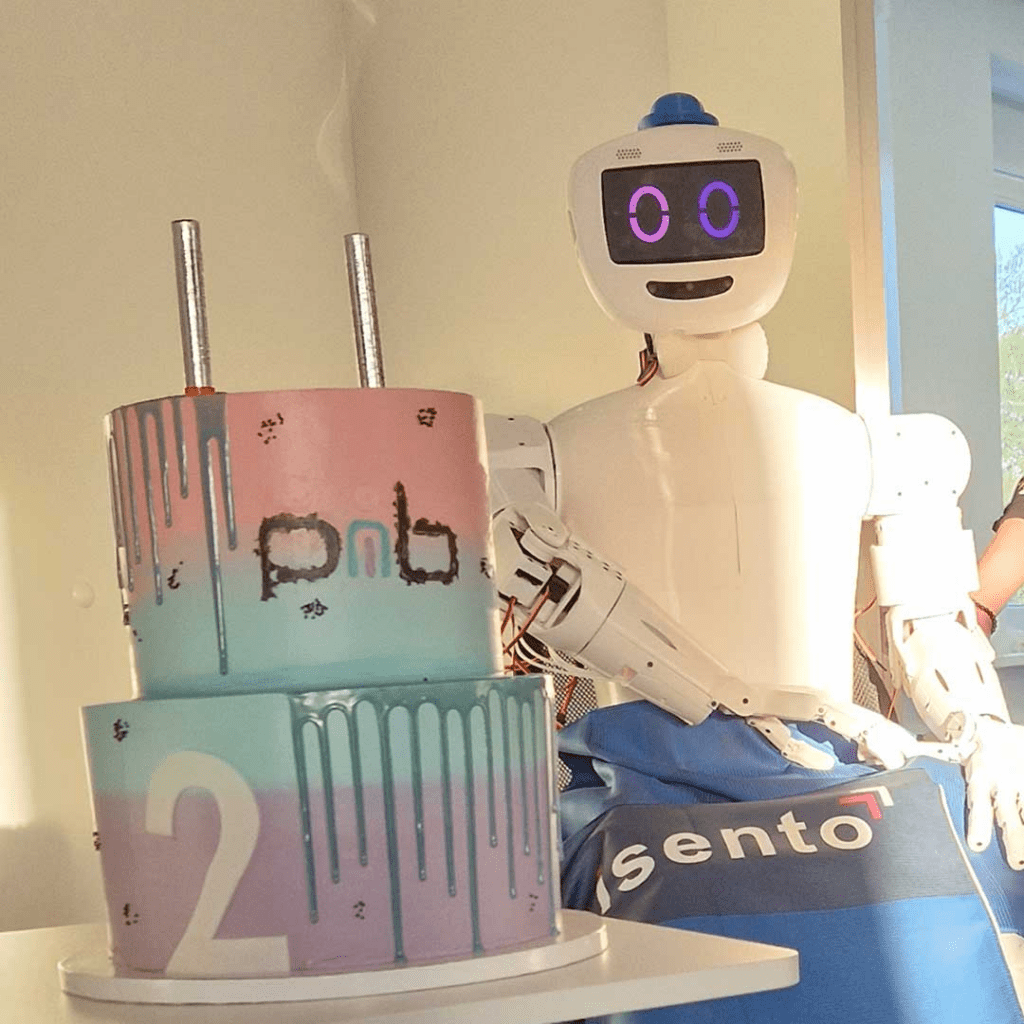
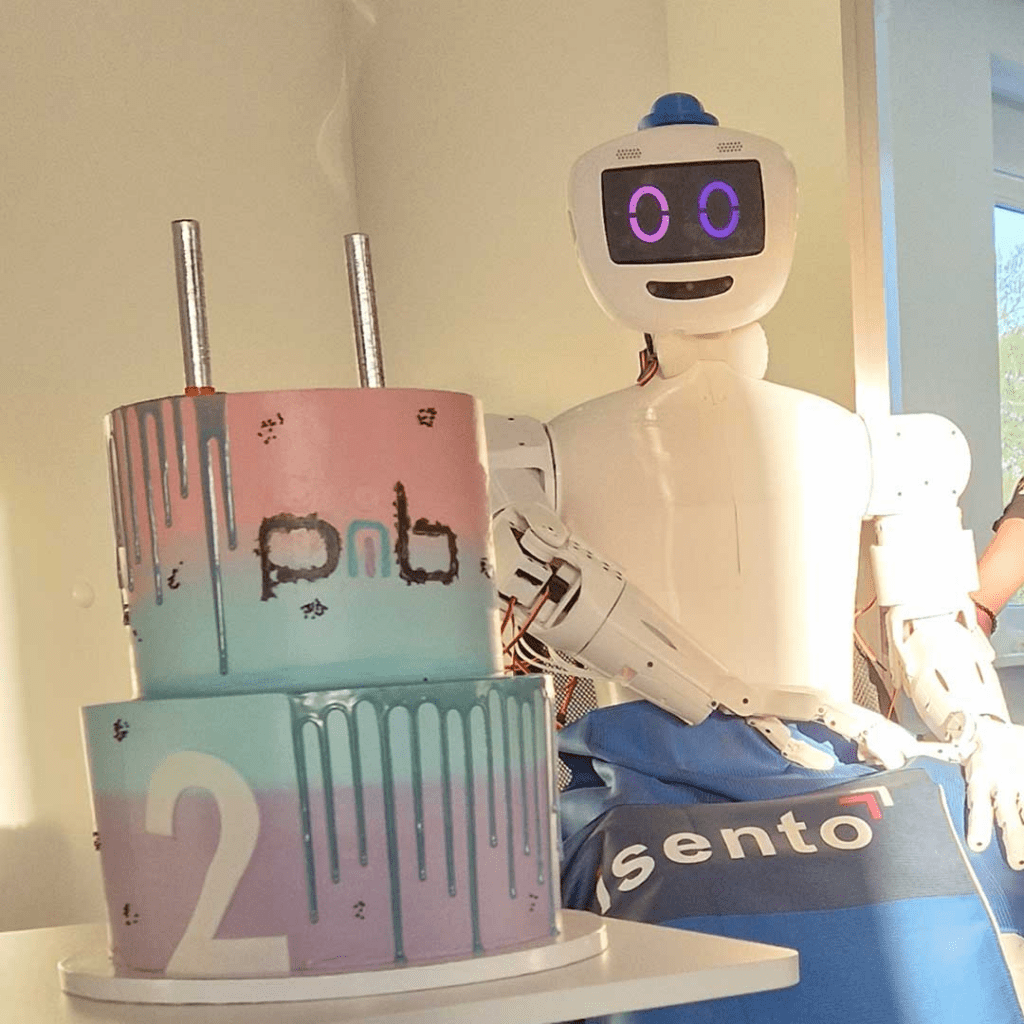
It’s not every day that a robot turns two years old, so the team celebrated with a big party. The all new pib documentary was streamed to kick off the event, followed by different stations for guests to experience pib’s newest features hands-on.
pib started out as an idea that slowly took shape in the form of a master thesis and a robotic arm. From there, a humanoid robot was created that can easily be 3D printed with the free 3D print files on the website and then built with the help of the building manuals online. pib offers many ways to implement AI trainings such as voice assistant technology, object detection, imitation and more.
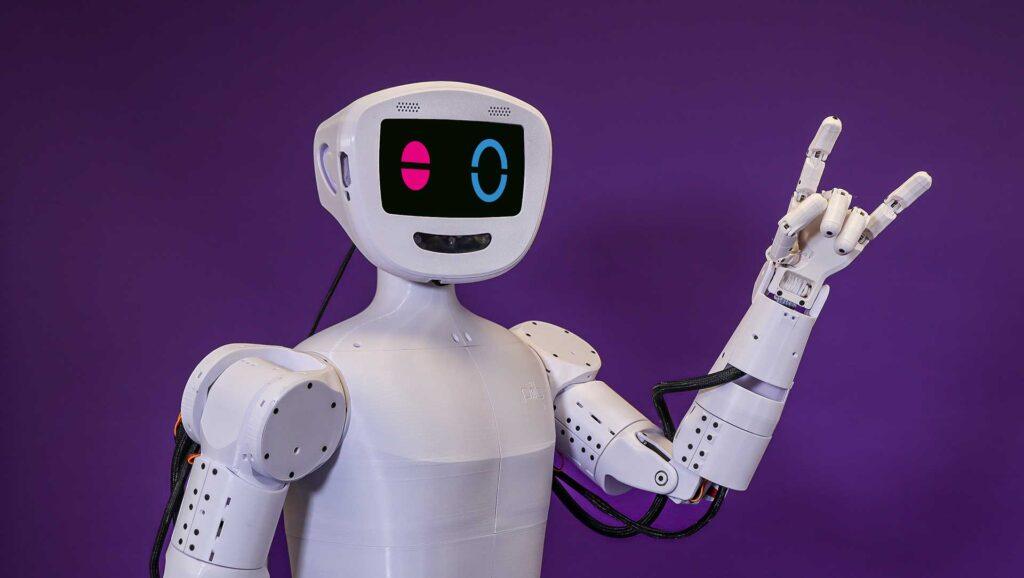
For starters, the pib team and the community have optimized pib’s mobility in a joint effort. The result is impressive: In its newest version, pib can now move its arms at basically all angles. Another rapidly progressing topic is pib’s digital twin which received a birthday present by the community members that took on this project: The camera now works in the virtual environment, enabling the camera stream to be transmitted to the outside world to be analyzed there and then become the base of control processes.
Talk To Me, pib!
Aside from that, there has been some significant progress in the field of human-machine interaction, particularly focusing on enabling voice-based communication with pib through advanced voice assistant technology. Exploring the potential of natural speech interaction has become a significant area of the team’s current efforts and the project is committed to advancing pib’s capabilities in this direction.
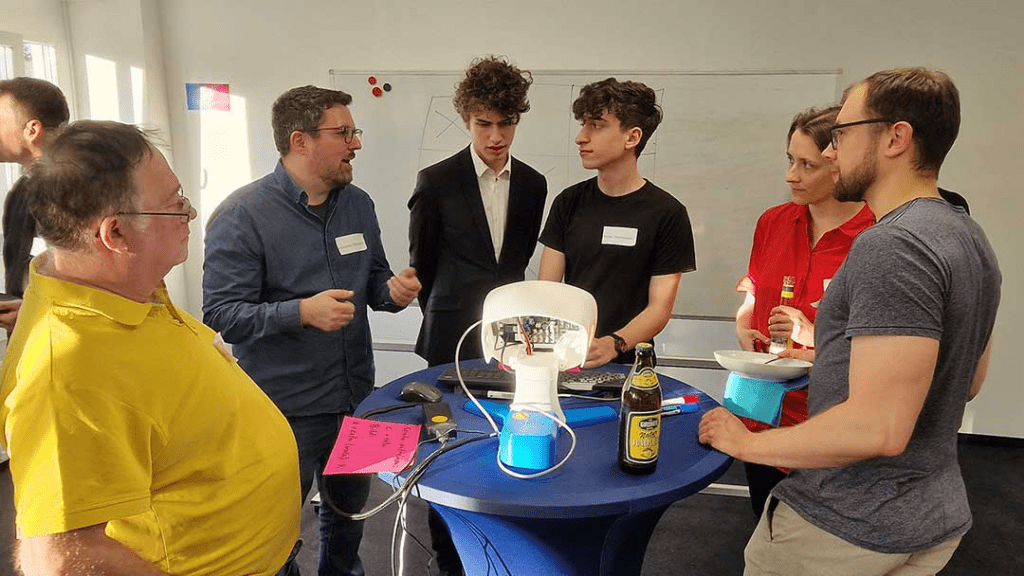
One of the newest features that were revealed at the pib party is communication in a multimodal world. The robot captures an image, analyzes it, and then answers questions in relation to the image. For example, when asking pib “where are we right now?” it interprets the room and its setting and will answer something like “we are in an office space”.
With this new feature, pib was also able to play its first round of Tic Tac Toe. The team drew the gameboard on a whiteboard so that pib was able to analyze the current state of the game and determine the next move with commands such as “place the next X in the top right corner”.
Join The Community
The pib community is rapidly growing and consists of 3D printing, robotics and AI enthusiasts. Whether you’re a rookie or an expert, anyone is invited to join, share their ideas and work on exciting projects together.
Vor zwei Jahren wurde das Open-Source-Robotikprojekt pib ins Leben gerufen. Das Ziel von pib, dem printable intelligent bot zum Selberbauen, ist es, die Hürden zu senken und Robotik und Künstliche Intelligenz für alle Interessierten zugänglich zu machen. In den letzten zwei Jahren hat pib eine aktive und engagierte Community aufgebaut, die das Projekt unterstützt und vorantreibt. Seit dem Start des Projekts ist also viel passiert – Zeit, um zurückzublicken, wie weit pib gekommen ist.
Meilensteine, Herausforderungen und was als Nächstes kommt
Es kommt nicht jeden Tag vor, dass ein Roboter zwei Jahre alt wird, also feierte das Team mit einer großen Party. Zum Auftakt der Veranstaltung wurde die brandneue pib-Dokumentation gestreamt, gefolgt von verschiedenen Stationen, an denen die Gäste die neuesten Funktionen von pib selbst ausprobieren konnten.
pib begann als eine Idee, die in Form einer Masterarbeit und eines Roboterarms langsam Gestalt annahm. Daraus entstand ein humanoider Roboter, der mit den kostenlosen 3D-Druckdateien auf der Website einfach in 3D gedruckt und dann mit Hilfe der online verfügbaren Bauanleitungen gebaut werden kann. pib bietet viele Möglichkeiten zur Implementierung von KI-Trainings wie Sprachassistenten, Objekterkennung, Imitation und mehr.
Zunächst einmal haben das pib-Team und die Community gemeinsam die Beweglichkeit von pib optimiert. Das Ergebnis kann sich sehen lassen: In der neuesten Version kann pib seine Arme nun in praktisch allen Winkeln bewegen. Ein weiteres sich rasant entwickelndes Thema ist der digitale Zwilling von pib, der von den verantwortlichen Community-Mitgliedern ein Geburtstagsgeschenk erhalten hat: Die Kamera arbeitet nun in der virtuellen Umgebung, so dass das Kamerabild in die Außenwelt übertragen werden kann, um dort analysiert zu werden und dann zur Grundlage von Steuerungsprozessen zu werden.
Sprich mit mir, pib!
Darüber hinaus gab es einige bedeutende Fortschritte im Bereich der Mensch-Maschine-Interaktion, insbesondere bei der sprachbasierten Kommunikation mit pib durch fortschrittliche Sprachassistententechnologie. Das Team sieht großes Potenzial in der natürlichen Sprachinteraktion und arbeitet daran, die Fähigkeiten von pib in dieser Hinsicht noch weiter zu optimieren.
Eine der neuesten Funktionen, die auf der pib-Party vorgestellt wurden, ist die Kommunikation in einer multimodalen Welt. Der Roboter nimmt ein Bild auf, analysiert es und beantwortet dann Fragen im Zusammenhang mit dem Bild. Wenn man pib zum Beispiel fragt: „Wo sind wir gerade?“, interpretiert er den Raum und seine Umgebung und antwortet etwa: „Wir sind in einem Büro“.
Mit dieser neuen Funktion konnte pib auch seine erste Runde Tic Tac Toe spielen. Das Team zeichnete das Spielbrett auf ein Whiteboard, so dass pib in der Lage war, den aktuellen Stand des Spiels zu analysieren und den nächsten Zug mit Befehlen wie „platziere das nächste X in der oberen rechten Ecke“ zu bestimmen.
Join The Community
Die pib-Community wächst schnell und besteht aus 3D-Druck-, Robotik- und KI-Enthusiasten. Ob Anfänger oder Experte – jeder ist eingeladen, mitzumachen, seine Ideen zu teilen und gemeinsam an spannenden Projekten zu arbeiten.